Настоящее Руководство пользователя предназначено для ознакомления
обслуживающего персонала с процедурой программирования преобразователей
частоты векторных VFD1 (в дальнейшем по тексту именуемых “ПЧВ” или
“прибор”).
Устройство, принцип действия, конструкция, процессы монтажа и технической
эксплуатации ПЧВ приведены в руководстве по эксплуатации на прибор.
ПЧВ всех исполнений комплектуются локальной панелью оператора,
используемой для программирования и индикации значений параметров
работы прибора.
Используемые аббревиатуры
AI – аналоговый вход
AO – аналоговый выход
DI – дискретный вход
FDT – значение обнаруживаемой частоты
FM – многофункциональный дискретный выход
FMP – работа многофункционального дискретного выхода
в режиме выдачи импульсов
FMR – работа многофункционального дискретного выхода
в режиме выдачи дискретных сигналов
IGBT-ключ – биполярный транзистор с изолированным затвором
NO – нормально разомкнутый;
NС – нормально замкнутый;
SVC – векторный принцип управления без обратной связи
U/f – вольт-частотный (скалярный) принцип управления
ЛПО – локальная панель оператора – панель прибора, которая
предназначена для индикации значений параметров и настройки прибора
Режим SVC (Sensorless Vector Control) — векторное управление без
обратной связи
1
Скалярный режим U/f
0: Режим SVC. Векторное управление без обратной связи
Относится к режиму управления двигателем с разомкнутым контуром.
Данный режим подходит для общепромышленного высокопроизводительного
применения в случаях, когда один ПЧВ может управлять только одним
двигателем. Примеры применения: станки, центрифуги, прядильные машины,
машины для литья под давлением и т. д.
Примечание
При выборе
режима управления SVC (векторное режим управления без обратной связи)
необходимо провести автоматическую подстройку двигателя. Только
точные параметры двигателя, введенные в ПЧВ в соответствии с данными
шильдика двигателя, позволяют в полной мере использовать преимущества
векторного режима управления
1: Скалярный режим U/f
Данный режим подходит
для случаев, когда нагрузка невелика или один привод переменного тока
управляет сразу несколькими двигателями, например, группой вентиляторов
или насосами.
Параметр F0.01
F0.01
Источник подачи сигнала запуска
Значение по умолчанию
0
Диапазон значений
0
С клавиатуры панели управления (LED выключен)
1
Через дискретный вход (LED горит)
2
Через канал RS–485 (LED мигает)
С помощью данного параметра необходимо выбрать источник подачи
сигнала запуска:
0: С клавиатуры панели управления (LED выключен)
Управление ПЧВ осуществляется с помощью кнопок и , расположенных
на встроенной локальной панели оператора (ЛПО).
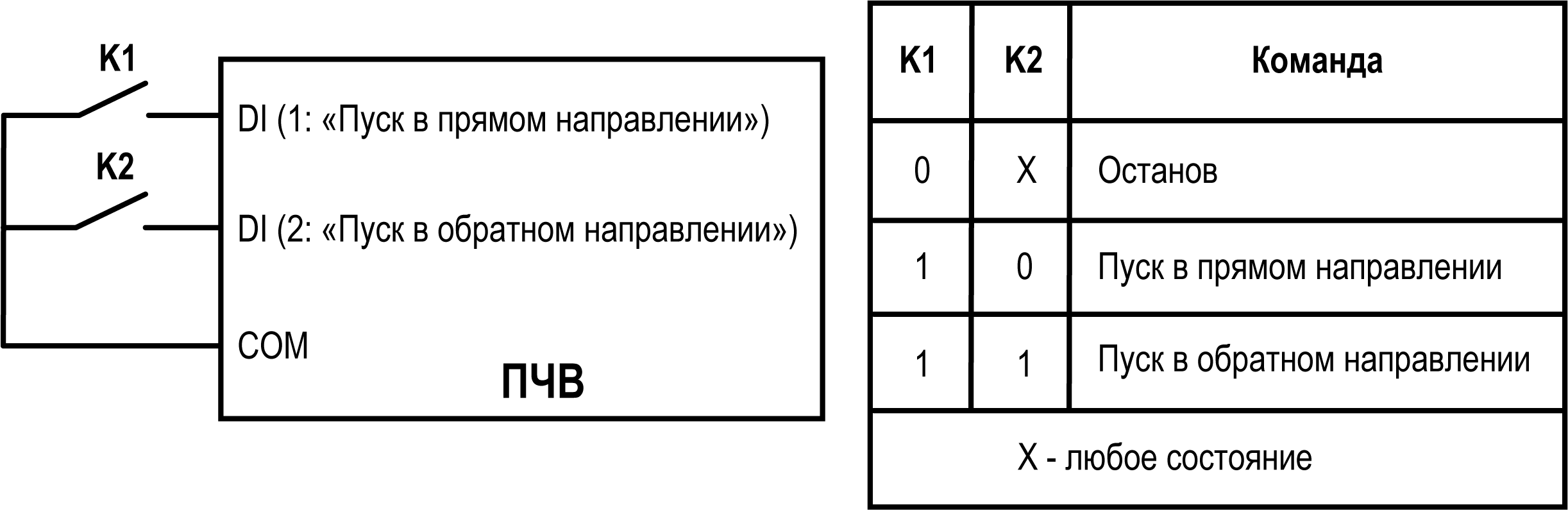
1: Через дискретный вход (LED горит)
Запуск
и останов преобразователя частоты осуществляется с помощью дискретных
входов DI.
По умолчанию пуск в прямом направлении производится
через DI1, пуск в обратном направлении – через DI2. Функции дискретных
входов настраиваются в параметрах F5.00 – F5.05 (см. раздел).
2: Через канал RS–485 (LED мигает)
Команда
на пуск и останов преобразователя частоты поступает от мастера сети
по протоколу Modbus RTU.
Сетевые настройки прибора осуществляются
с помощью группы параметров FC (см. раздел). Адреса регистров управления и их возможные
значения указаны в таблице.
Адреса и значения регистров управления по каналу RS-485
Название
Адрес (hex)
Описание
Тип доступа
Заданная частота
1000
Значения задаются в диапазоне -10000 – 10000 (dec):
-10000
соответствует -100.00%
10000 соответствует 100.00%
Чтение и запись
Задаваемая
команда
2000
0001: Запуск в прямом направлении
Запись
0002: Запуск в обратном направлении
0003: Фиксированная скорость в прямом
направлении
0004: Фиксированная скорость в обратном
направлении
0005: Останов выбегом
0006: Останов с замедлением
0007: Сброс аварии
Контроль
клемм выходных сигналов
2001
Бит 0 – бит 1: Резерв
0: Выход отключен
1: Выход включен
Запись
Бит 2: Релейный выход 1
Бит 3: Релейный выход 2
Бит 4: Дискретный выход FM
Бит 5: Виртуальный релейный выход
VDO
Бит 6 – Бит 9: Резерв
Значение AO1
2002
0 – 7FFF соответствует 0% – 100%
Запись
Значение
AO2
2003
0 – 7FFF соответствует 0% – 100%
Запись
Импульсный выход
2004
0 – 7FFF соответствует 0% – 100%
Запись
Параметр F0.02
F0.02
Изменение частоты Изменение частоты
стрелками Вверх/Вниз
Значение по умолчанию
0
Диапазон значений
0
Рабочая частота
1
Заданная частота
Данная функция активна только при использовании предустановленного
при помощи панели оператора значения в качестве источника задания
частоты (в параметре F0.03 задано значение 0 или 1). Используется
для определения того, является ли установленная частота текущей рабочей
частотой или текущей заданной частотой при изменении частоты с помощью
кнопок и ЛПО.
Параметр F0.03
F0.03
Источник задания частоты канала X
Значение по умолчанию
0
Диапазон значений
0
Значение, предустановленное при помощи панели управления (не сохраняется
при отключении питания)
1
Значение, предустановленное при помощи панели управления (сохраняется
при отключении питания)
2
Аналоговый вход AI1
3
Аналоговый вход AI2
4
Резерв
5
Импульсный вход DI6
6
Многоскоростной режим
7
Встроенный ПЛК
8
ПИД-регулятор
9
Канал RS-485
С помощью данного параметра необходимо выбрать главный источник
задания частоты ПЧВ:
0: Значение, предустановленное при помощи панели управления
(не сохраняется при отключении питания)
Начальное значение
частоты равно нулю. Значение частоты можно изменить с помощью встроенного
потенциометра либо с помощью кнопок и , расположенных на локальной панели
оператора.
Также частоту можно изменять с помощью функций “Увеличение
частоты” / “Уменьшение частоты”, назначенных на соответствующие дискретные
входы (см. описание группы параметров F5 в разделе).
Установленное значение частоты
автоматически сбросится до нуля в следующих случаях:
после отключения питания прибора;
при смене источника задания частоты.
1: Значение, предустановленное при помощи панели управления
(сохраняется при отключении питания)
Начальное значение
частоты задается параметром F0.08 “Частота, задаваемая посредством
цифровой клавиатуры“.
Значение частоты можно изменить с помощью
встроенного потенциометра либо с помощью кнопок и , расположенных
на локальной панели оператора.
Также частоту можно изменять
с помощью функций “Увеличение частоты” / “Уменьшение частоты”, назначенных
на соответствующие дискретные входы (см. описание группы параметров F5 в разделе).
Значение
частоты сохраняется после отключения питания.
2: Аналоговый вход AI1
3: Аналоговый
вход AI2
Частота задается пропорционально значению тока
или напряжения на соответствующем аналоговом входе прибора.
Преобразователь частоты оснащен двумя аналоговыми входами AI1 и AI2:
AI1 предназначен для приема сигнала напряжения 0 – 10 В и может
служить для подключения внешнего потенциометра;
AI2 является универсальным и может работать как в режиме приема
сигнала напряжения 0 – 10 В, так и в режиме приема сигнала тока 4
– 20 мА.
Режим работы аналогового входа AI2 (0 – 10 В / 4 – 20 мА) выбирается
положением джампера J2, расположенного рядом с клеммником прибора.
5: Импульсный вход DI6
Значение частоты
задается с помощью импульсного входа DI6, настроенного на измерение
частоты (для параметра F5.05 установлено значение 30). Максимальная
входная частота – 20 кГц.
6: Многоскоростной режим
Позволяет задать
до 16-ти предустановленных значений скорости.
Выбор требуемой
предустановленной скорости осуществляется с помощью комбинации состояний
дискретных входов. Дискретные входы настраиваются при помощи параметров F5.00 – F5.05, в которых задаются
значения 12…15, соответствующие функциям “Многоскоростной вход 1…4”
(см. раздел).
Требуемые значения скорости
задаются в параметрах FD.00 – FD.15 в процентах, где значение 100
% соответствует максимальному значению выходной частоты, заданному
в параметре F0.10. Для осуществления реверса необходимо
задать отрицательное значение.
7: Встроенный ПЛК
Позволяет настроить работу
ПЧВ по шагам с возможностью выбора скорости, длительности, времени
разгона и торможения для каждого шага.
Настройка работы встроенного
ПЛК осуществляется в группе параметров FD (см. раздел).
8: ПИД-регулятор
Задание частоты выходным
сигналом ПИД-регулятора.
Изменение сигнала от 0 до 100 % соответствует
изменению частоты в диапазоне от 0 Гц до максимального значения. Настройка
ПИД-регулятора осуществляется при помощи группы параметров F9 (см. раздел).
9: Канал RS-485
Значение частоты записывается
в регистр с адресом 0x1000 в диапазоне от -10000 до 10000 (dec). Значение
10000 соответствует 100 % от значения максимальной выходной частоты,
заданного в параметре F0.10.
Параметр F0.04
F0.04
Источник задания частоты канала Y
Значение по умолчанию
0
Диапазон значений
0
Предустановленное при помощи панели управления значение (не сохраняется
при отключении питания)
1
Предустановленное при помощи панели управления значение (сохраняется
при отключении питания)
2
Аналоговый вход AI1
3
Аналоговый вход AI2
4
Резерв
5
Импульсный вход DI6
6
Многоскоростной режим
7
ПИД-регулятор
8
Канал RS-485
9
Встроенный ПЛК
Если вспомогательный источник частоты, заданный в параметре F0.04, используется как независимый канал (т. е. источник
задания частоты выбирается переключением с канала X на канал Y), то
его функционал аналогичен параметру F0.03.
Если вспомогательный источник частоты, заданный в параметре F0.04, используется в качестве дополнения к основному,
заданному в параметре F0.03), (т. е. задействуется
для формирования суммарного сигнала, например, посредством сложения
каналов Х и Y и других доступных математических операций), то для
него действуют следующие правила:
при задании частоты с помощью цифровой клавиатуры (в параметре F0.04 задано значение 0 или 1), доступно только ее редактирование с помощью
кнопок , и потенциометра ЛПО;
если в качестве вспомогательного источника используется аналоговый
или импульсный вход, то 100% входного сигнала соотносится с диапазонами,
заданными в параметрах F0.05 и F0.06.
Примечание
Запрещено устанавливать одинаковые источники
задания частоты для каналов X и Y. Значения, задаваемые в параметрах F0.03 и F0.04 должны всегда отличаться друг от друга.
Параметры F0.05 и F0.06
F0.05
Диапазон вспомогательного источника
частоты Y
Значение по умолчанию
0
Диапазон значений
0
Относительно максимальной частоты
1
Относительно источника частоты X
F0.06
Диапазон вспомогательного источника частоты Y в процентах
Значение по умолчанию
0 %
Диапазон значений
0 % – 100 %
Когда выбор источника задания частоты установлен в качестве наложения
частот (в параметре F0.07 задано значение 1, 3 или 4), он
используется для определения диапазона настройки вспомогательного
источника частоты.
Параметр F0.05 используется для определения относительного
какой частоты будет изменяться диапазон канала Y. Если он связан с
максимальной выходной частотой, заданной в параметре F0.10, то его диапазон является фиксированным значением. Если он связан
с основным источником частоты X, то его диапазон будет следовать за
изменением основного источника частоты X.
Параметр F0.07
F0.07
Выбор источника задания частоты
Значение по умолчанию
0
Диапазон значений
000х
Выбор источника частоты
0
Основной источник задания частоты X
1
Результат расчета основной и вспомогательной частот
2
Переключение между X и Y
3
Переключение между X и комбинацией X & Y
4
Переключение между Y и комбинацией X & Y
00х0
Выбор комбинации каналов для задания частоты
0
Канал X + канал Y
1
Канал X – канал Y
2
Максимальный из каналов X и Y
3
Минимальный из каналов X и Y
4
Перемножение X * Y
Используйте данный параметр для выбора источника задания частоты.
Настройка частоты осуществляется комбинацией основного источника частоты
X и вспомогательного источника частоты Y.
000х: Выбор источника частоты
0: Основной
источник задания частоты X:
Источник задания частоты выбирается
в параметре F0.03. Канал Y не участвует в формировании
частоты.
1: Результат расчета основной и вспомогательной
частот:
Выбор комбинации каналов для задания частоты определяется
в разряде 00х0.
2: Переключение между X и Y:
Переключение
осуществляется замыканием дискретного входа, для которого назначена
функция “Переключение источника задания частоты” (в параметре соответствующего
дискретного входа F5.00 – F5.05 задано значение 18).
3: Переключение между X и комбинацией X & Y:
Переключение
осуществляется замыканием дискретного входа, для которого назначена
функция “Переключение источника задания частоты” (в параметре соответствующего
дискретного входа F5.00 – F5.05 задано значение 18).
4: Переключение между Y и комбинацией X & Y:
Переключение
осуществляется замыканием дискретного входа, для которого назначена
функция “Переключение источника задания частоты” (в параметре соответствующего
дискретного входа F5.00 – F5.05 задано значение 18).
00х0: Выбор комбинации каналов для задания частоты
0: Канал X + канал Y:
Комбинация сложения каналов
Х и Y.
1: Канал X – канал Y:
Комбинация вычитания
каналов Х и Y.
2: Максимальный из каналов X и Y:
Комбинация сравнения каналов Х и Y и выбора максимального значения.
3: Минимальный из каналов X и Y:
Комбинация сравнения
каналов Х и Y и выбора минимального значения.
4: Перемножение
X * Y:
Комбинация перемножения каналов Х и Y.
Параметр F0.08
F0.08
Частота, задаваемая посредством цифровой
клавиатуры
Значение данного параметра является опорным значением частоты,
когда в качестве источника задания частоты выбрано значение, устанавливаемое
на ЛПО (в параметре F0.03 / F0.04 задано
значение 0 или 1).
Параметр F0.09
F0.09
Выбор направления вращения
Значение по умолчанию
0
Диапазон значений
0
В том же направлении
1
Реверс
С помощью данного параметра возможно изменить направление вращения
вала двигателя. Эквивалентно переподключению двух любых фаз питания
электродвигателя
Параметр используется для определения источника задания верхнего
предела частоты.
Верхний предел частоты может быть предустановлен в параметре F0.12, либо задан через аналоговый или импульсный
вход (в этом случае значение сигнала 100% на аналоговом входе соответствует
значению верхнего предела частоты, заданного в параметре F0.12).
Установка верхнего предела частоты с помощью аналогового или импульсного
входа может понадобится, например, при использовании режима управления
моментом. Поскольку, режим управления моментом не поддерживает контроль
скорости, то для того, чтобы избежать работы оборудования на скорости
выше номинальной, в качестве источника задания верхнего предела частоты
можно использовать аналоговый вход. Таким образом, при достижении
верхнего предела частоты ПЧВ остановит процесс управления моментом
и предотвратит превышение скорости выше установленной.
Если верхний предел задания частоты задается аналоговым входом,
то параметр F0.13 используется в качестве смещения при расчете
верхней границы: значение параметра F0.13 добавляется
к установленному аналоговым входом значению верхнего предела частоты
в качестве окончательного значения настройки верхней граничной частоты.
Настройка нижнего предела задания частоты может использоваться
для принудительного ограничения работы двигателя на частоте ниже критической
(например, не рекомендуется работа насосов на частоте ниже 20 Гц).
Логика работы ПЧВ при достижении нижнего предела частоты задается
в параметре F0.15.
Параметр F0.15
F0.15
Выбор действия ПЧВ при достижении частоты ниже заданной предельной
Значение по умолчанию
0
Диапазон значений
0
Работа на минимальной частоте
1
Переход в стоп
2
Переход в ожидание
0: Работа на минимальной частоте
Если заданная
частота ниже или равна минимальной, то ПЧВ продолжает работу на минимальной
частоте.
1: Переход в стоп
Если заданная частота
ниже или равна минимальной, то ПЧВ прекращает свою работу и ожидает
повторной подачи команды на пуск.
2: Переход в ожидание
Если заданная частота
ниже или равна минимальной, то ПЧВ снижает выходную частоту до нуля
и переходит в режим ожидания. Если в дальнейшем заданная частота становится
выше минимальной, ПЧВ сразу включается в работу на этой частоте без
подачи повторной команды на пуск.
Параметр F0.16
F0.16
Частота ШИМ
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.5 кГц – 16.0 кГц
В параметре F0.16 задается значение рабочей несущей
частоты IGBT (частоты ШИМ) преобразователя частоты. Значение частоты
ШИМ оказывает влияние на уровень шума работы двигателя, рост температуры
двигателя и ПЧВ, качество формы сигнала тока на выходе ПЧВ и ряд других
параметров. Исходя из конкретной области применения ПЧВ, можно задать
приемлемое значение частоты ШИМ. Описание эффекта от задаваемого значения
частоты ШИМ приведено в таблице.
Эффект от задаваемого значения частоты ШИМ
Частота
ШИМ
Уровень шума работы двигателя
Качество формы сигнала тока на выходе ПЧВ
Рост температуры двигателя
Рост температуры ПЧВ
Ток утечки
Уровень
внешних помех
Параметр F0.16
F0.18
Время разгона 1
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.0 с – 6500.0 с
F0.19
Время торможения 1
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.0 с – 6500.0 с
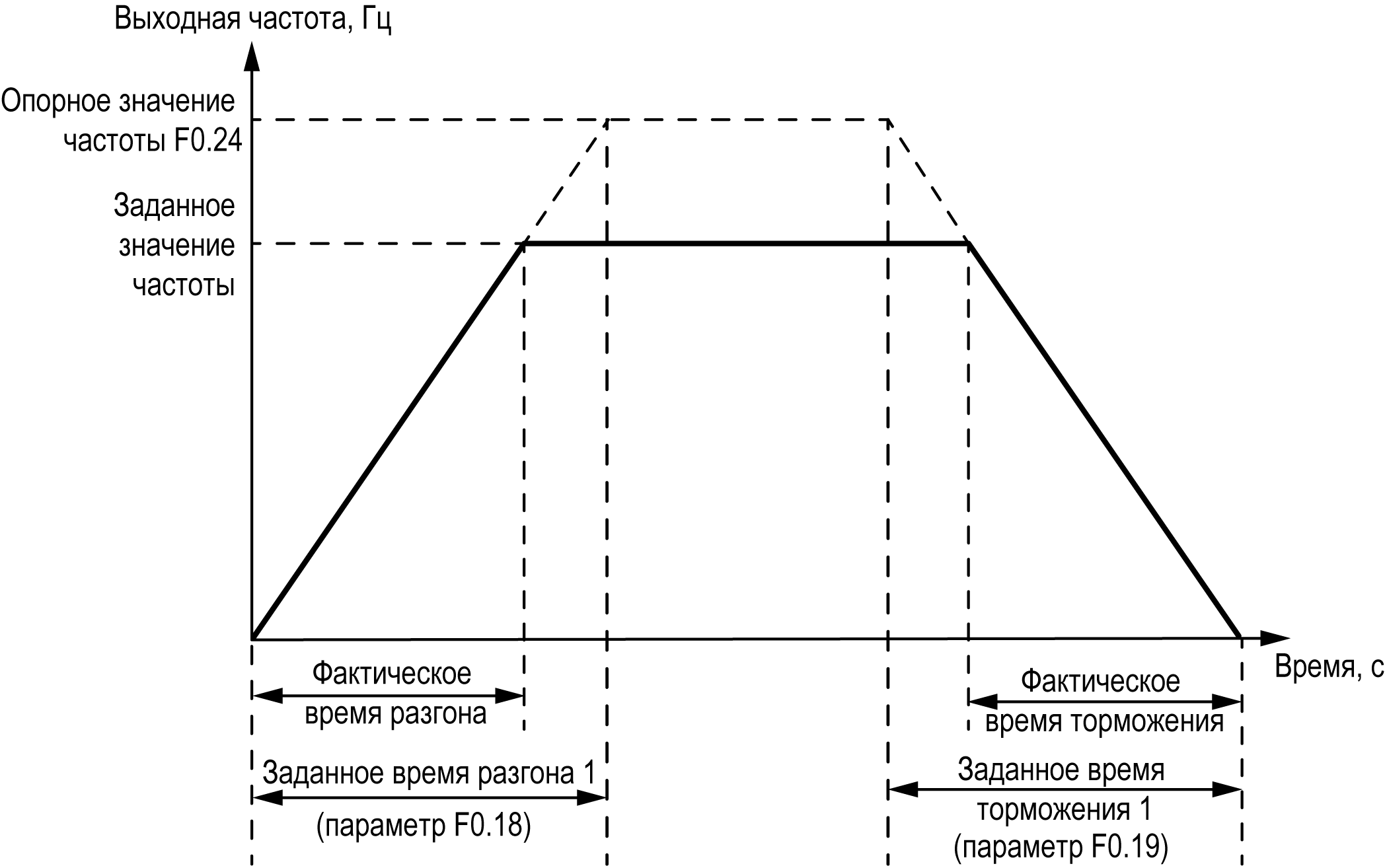
Время разгона – это время, необходимое для разгона от частоты
0.00 Гц до опорной частоты, заданной в параметре F0.24.
Время торможения – это время, необходимое для торможения
от опорной частоты, заданной параметре F0.24 до частоты
0.00 Гц.
Значение опорной частоты по умолчанию равно значению, заданному
в параметре максимальной выходной частоты F0.10 (т. е.
50 Гц).
Примечание
Фактическое время разгона и торможения может быть
меньше времени, заданного в параметрах F0.18 и F0.19, как показано
на рисунке.
Время
разгона и торможения
В ПЧВ существует 4 группы времени разгона и торможения:
Группа 1: Время разгона 1 задается в параметре F0.18, время торможения 1 – в параметре F0.19;
Группа 2: Время разгона 2 задается в параметре F8.03, время торможения
2 – в параметре F8.04;
Группа 3: Время разгона 3 задается в параметре F8.05, время торможения
3 – в параметре F8.06;
Группа 4: Время разгона 4 задается в параметре F8.07, время торможения
4 – в параметре F8.08.
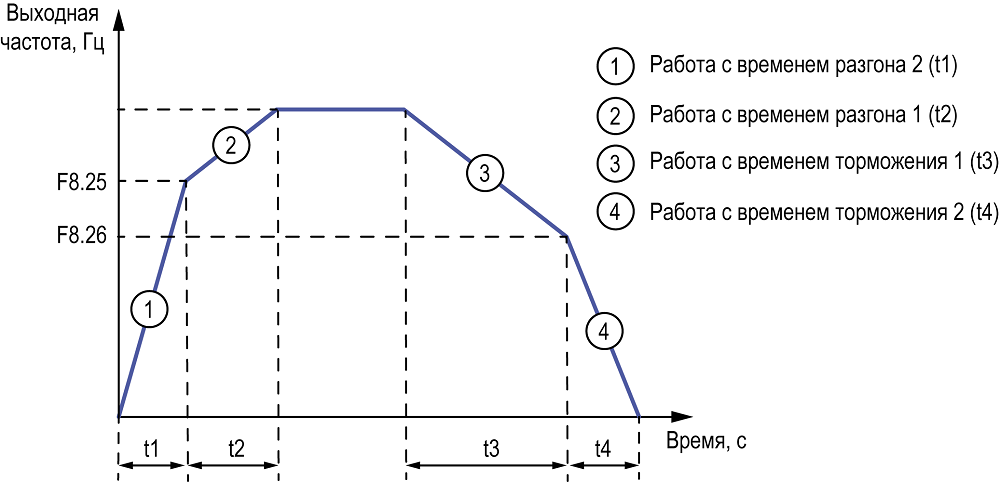
Требуемая группа с заданным временем разгона и торможения может
быть выбрана с помощью параметров многофункциональных дискретных входов F5.00 – F5.05, в которых задаются
значения 16 и 17 (функции “Вход 1 выбора времени разгона/торможения”
и “Вход 2 выбора времени разгона/торможения”, см. раздел).
Параметр F0.20
F0.20
Сброс настроек
Значение по умолчанию
0
Диапазон значений
0
Нет сброса
1
Сброс параметров на заводские настройки, кроме параметров двигателя
(см. группу параметров F2 в разделе) и параметра F0.26
2
Удаление записей о неисправности
После задания в параметре F0.20 значений
1 или 2 произойдет инициализация параметров ПЧВ, после чего параметр
автоматически будет сброшен на значение 0.
При задании в параметре значения 2, кроме удаления записей о неисправности
будут также сброшены значения:
Все параметры доступны только
для просмотра, редактирование возможно только параметра F0.21
Данный параметр используется для блокировки случайного изменения
значений параметров ПЧВ.
Также, для доступа к редактированию параметров, поддерживается
возможность использования пароля: для того, чтобы перейти к редактированию
параметров необходимо ввести ранее установленный пароль. Для установки
пароля используется группа параметров FE (см. раздел).
Параметр F0.22
F0.22
Сохранение частоты, заданной посредством цифровой клавиатуры
Значение по умолчанию
1
Диапазон значений
0
Не сохраняется
1
Сохраняется
Функция активна только для значений частоты предустановленных или
изменяемых посредством цифровой клавиатуры ЛПО.
0: Не сохраняется
После остановки ПЧВ значение
частоты, установленное на ЛПО, сбрасывается до значения, заданного
в параметре F0.08.
1: Сохраняется
После остановки ПЧВ значение
частоты, установленное на ЛПО, сохраняется. Значение параметра F0.08 при этом не перезаписывается.
Параметр F0.23
F0.23
Разрядность значения времени разгона
Значение по умолчанию
1
Диапазон значений
0
1 с
1
0.1 с
2
0.01 с
Значение в данном параметре задает положение десятичной точки значений
всех параметров, имеющих отношение к времени разгона и торможения.
Предупреждение
Следует обратить особое внимание, что после изменения
значения параметра F0.23 автоматически изменятся значения
параметров F0.18, F0.19, F8.01 – F8.08
Параметр F0.24
F0.24
Опорное значение для рампы разгона и торможения
Значение по умолчанию
0
Диапазон значений
0
Максимальная выходная частота, заданная в параметре F0.10
1
Заданная частота
2
100 Гц
Данный параметр определяет опорное значение частоты, используемое
для построения рампы разгона и торможения (см. рисунок).
Рампа разгона и
торможения
Параметр F0.25
F0.25
Режим работы вентилятора охлаждения преобразователя частоты
Значение по умолчанию
0
Диапазон значений
0
После останова преобразователя частоты вентилятор работает в соответствии
с температурой преобразователя частоты (опорная температура 50 °С).
При запущенном двигателе вентилятор работает постоянно
1
Вентилятор работает постоянно
при поданном питании
Параметр F0.25 служит для выбора режима работы встроенного
в ПЧВ вентилятора охлаждения.
Значение данного параметра можно изменять во время работы ПЧВ,
регулируя работу встроенного вентилятора в зависимости от изменений
условий эксплуатации. Регулировка работы встроенного вентилятора позволяет
достигнуть баланс между поддержанием непрерывного максимального теплоотвода
и продлением срока службы вентилятора.
0: После останова преобразователя частоты вентилятор
работает в соответствии с температурой преобразователя частоты
В данном режиме работа вентилятора после останова ПЧВ зависит
от текущего значения температуры ПЧВ (опорное значение температуры
равно 50 °С):
при температуре 50 °С или выше после подачи команды на останов
встроенный вентилятор будет продолжать работу, обеспечивая теплоотвод;
при температуре ниже 50 °С вентилятор автоматически отключится
через 30 секунд после подачи команды на останов.
При запущенном двигателе вентилятор ПЧВ работает постоянно.
1: Вентилятор работает постоянно при поданном питании
Данный режим обеспечивает постоянную работу вентилятора до тех
пор, пока на ПЧВ подано питающее напряжение.
Параметр F0.26
F0.26
Установка десятичной точки при задании частоты
Значение по умолчанию
2
Диапазон значений
1
1 знак после запятой (50.0 Гц)
2
2 знака после запятой (50.00
Гц)
По умолчанию значение частоты задается с точностью до двух знаков
после запятой (в параметре F0.26 задано значение 2).
Задание частоты с точностью до одного знака после запятой позволяет
записать в ПЧВ значение частоты вплоть до 1000 Гц (заводская настройка
параметра максимальной частоты ограничена значением 320.00 Гц).
Предупреждение
После изменения значения параметра F0.26 автоматически корректируются все параметры, связанные с заданием
частоты
Примечание
Значение, заданное в параметре F0.26 сохраняется
даже после сброса до заводских настроек с помощью параметра F0.20
Параметр F0.27
F0.27
Приоритет многоскоростного режима управления
Значение по умолчанию
1
Диапазон значений
0
Неактивно
1
Активно
Если установлен приоритет многоскоростного режима управления (в
параметре F0.27 задано значение 1) и для дискретных входов назначены
функции “Многоскоростной вход 1...4” (в соответствующих параметрах F5.00 – F5.05 заданы значения 12…15), а в группе
параметров FD (параметры FD.00 – FD.15) заданы соответствующие
скорости этапов, то можно регулировать выходную частоту комбинацией
состояний дискретных входов вне зависимости от источника задания частоты.
Группа F1: Управление процессом работы
Параметр F1.00
F1.00
Режим запуска
Значение по умолчанию
0
Диапазон значений
0
После торможения постоянным током запуск происходит с начальной частоты
1
Запуск с подхватом скорости
2
Запуск
с предварительным возбуждением
0: После торможения постоянным током запуск происходит
с начальной частоты
Если значение параметра F1.06 “Время торможения постоянным током при запуске
/ Время предварительного возбуждения” не равно нулю, то перед пуском
двигателя осуществляется торможение постоянным током. Это поможет
решить проблему обратного вращения вала двигателя в момент пуска на
малоинерционной нагрузке.
1: Запуск с подхватом скорости
Преобразователь
частоты сначала определяет направление вращения и скорость двигателя,
а затем запускается в соответствии со скоростью в реальном времени.
Данный режим подходит для перезапуска после кратковременного отключения
питания при больших инерционных нагрузках или для плавного перезапуска
насосов или вентиляторов. Установите точные параметры двигателя в
соответствии с его шильдиком в группе параметров F2 (см. раздел), чтобы добиться лучшего отслеживания
скорости.
2: Запуск с предварительным возбуждением
В данном режиме обеспечивается запуск с предварительным возбуждением.
Значение параметра F1.06 одновременно задает
время торможения постоянным током при запуске и время предварительного
возбуждения. Задайте в данном параметре требуемое время предварительного
возбуждения.
Параметр F1.01
F1.01
Режим отслеживания скорости
Значение по умолчанию
0
Диапазон значений
0
Вниз от частоты во время отключения питания ПЧВ
1
Вверх с нулевой скорости
2
Вниз с максимальной частоты
3
По возбуждению
В ПЧВ представлены 4 режима отслеживания скорости:
0: Вниз от частоты во время отключения питания ПЧВ
Обычно используется этот метод.
1: Вверх с нулевой скорости
Используется
при длительном отключении питания ПЧВ.
2: Вниз с максимальной частоты
Обычно используется
для высокоинерционной нагрузки.
3: По возбуждению
ПЧВ наводит ток возбуждения
для оценки частоты тока двигателя, после чего начинает работать на
рассчитанной частоте.
Параметр F1.02
F1.02
Коэффициент отслеживания скорости
Значение по умолчанию
20
Диапазон значений
1 – 100
Данный параметр служит для настройки отслеживания скорости. Чем
больше значение параметра, тем выше скорость отслеживания. Однако
слишком большое значение может привести к ненадежному отслеживанию.
Параметры F1.03 и F1.04
F1.03
Начальная частота
Значение по умолчанию
20
Диапазон значений
0.00 Гц – 10.00 Гц
F1.04
Время удержания стартовой частоты
Значение по умолчанию
0.0 с
Диапазон значений
0.0 с – 100.0 с
Для обеспечения требуемого крутящего момента при запуске, необходимо
задать соответствующее значение начальной частоты в параметре F1.03. Чтобы дождаться установления магнитного потока
при запуске двигателя, начальная частота поддерживается в течение
определенного периода времени, которое задается в параметре F1.04, а затем начинается ускорение.
Примечание
Значение начальной частоты F1.03 не ограничивается нижним пределом частоты, заданной в параметре F0.14. Если значение
заданной частоты (с помощью источника, выбранного в параметре F0.03) меньше значения
начальной частоты, преобразователь не может быть запущен и будет находиться
в состоянии ожидания.
Время удержания стартовой частоты, заданной в параметре F1.04, не учитывается:
при переключении между прямым и обратным ходом;
во время разгона,
но учитывается при работе встроенного ПЛК (в параметре F0.03 задано значение
7).
Параметры F1.03 и F1.04
F1.05
Постоянный ток торможения при пуске
/ Ток предварительного возбуждения
Значение по умолчанию
0 %
Диапазон значений
0 % – 100 %
F1.06
Время торможения постоянным током
при запуске / Время предварительного возбуждения
Значение по умолчанию
0.0 с
Диапазон значений
0.0 с – 100.0 с
Торможение постоянным током при запуске используется для полной
остановки двигателя перед запуском.
Предварительное возбуждение обычно используется для создания магнитного
поля перед запуском двигателя, чтобы повысить скорость реакции.
Если в параметре режима запуска F1.00 задано значение 0, то перед запуском двигателя преобразователь сначала
выполнит торможение постоянным током в соответствии со значением тока
торможения, заданным в параметре F1.05, а затем, по истечении времени торможения, заданного в параметре F1.06, начнет запуск двигателя. Чем выше значение
постоянного тока торможения, тем большее тормозное усилие будет создано
при торможении.
Если в параметре F1.06 время торможения
постоянным током задано равным нулю, то двигатель запускается напрямую
без торможения постоянным током.
Если в параметре режима запуска F1.00 задано значение 2, то при запуске двигателя преобразователь сначала
создаст магнитное поле в соответствии со значением тока предварительного
возбуждения, заданным в параметре F1.05 а затем, по истечении времени предварительного возбуждения, заданного
в параметре F1.06, начнет запуск двигателя.
Если в параметре F1.06 время предварительного
возбуждения задано равным нулю, то двигатель запускается напрямую
без задержек.
Примечание
Значение постоянного тока торможения при пуске
/ тока предварительного возбуждения (параметр F1.05) рассчитывается как процентное отношение к номинальному выходному
току ПЧВ.
Параметр F1.07
F1.07
Кривая разгона и торможения
Значение по умолчанию
0
Диапазон значений
0
Линейный разгон и торможение
1
S-образная кривая разгона и торможения A
2
S-образная
кривая разгона и торможения B
0: Линейный разгон и торможение
Выходная
частота изменяется линейно.
1: S-образная кривая разгона и торможения A
Выходная частота увеличивается или уменьшается в соответствии
с S-образной кривой.
Как правило, S-образная кривая разгона
и торможения применяется для оборудования с относительно плавным процессом
запуска и остановки, например, лифтов и ленточных конвейеров. Параметры F1.08 и F1.09 определяют временные пропорции
соответственно начального и конечного сегментов ускорения и замедления
S-образной кривой А (см. рисунок).
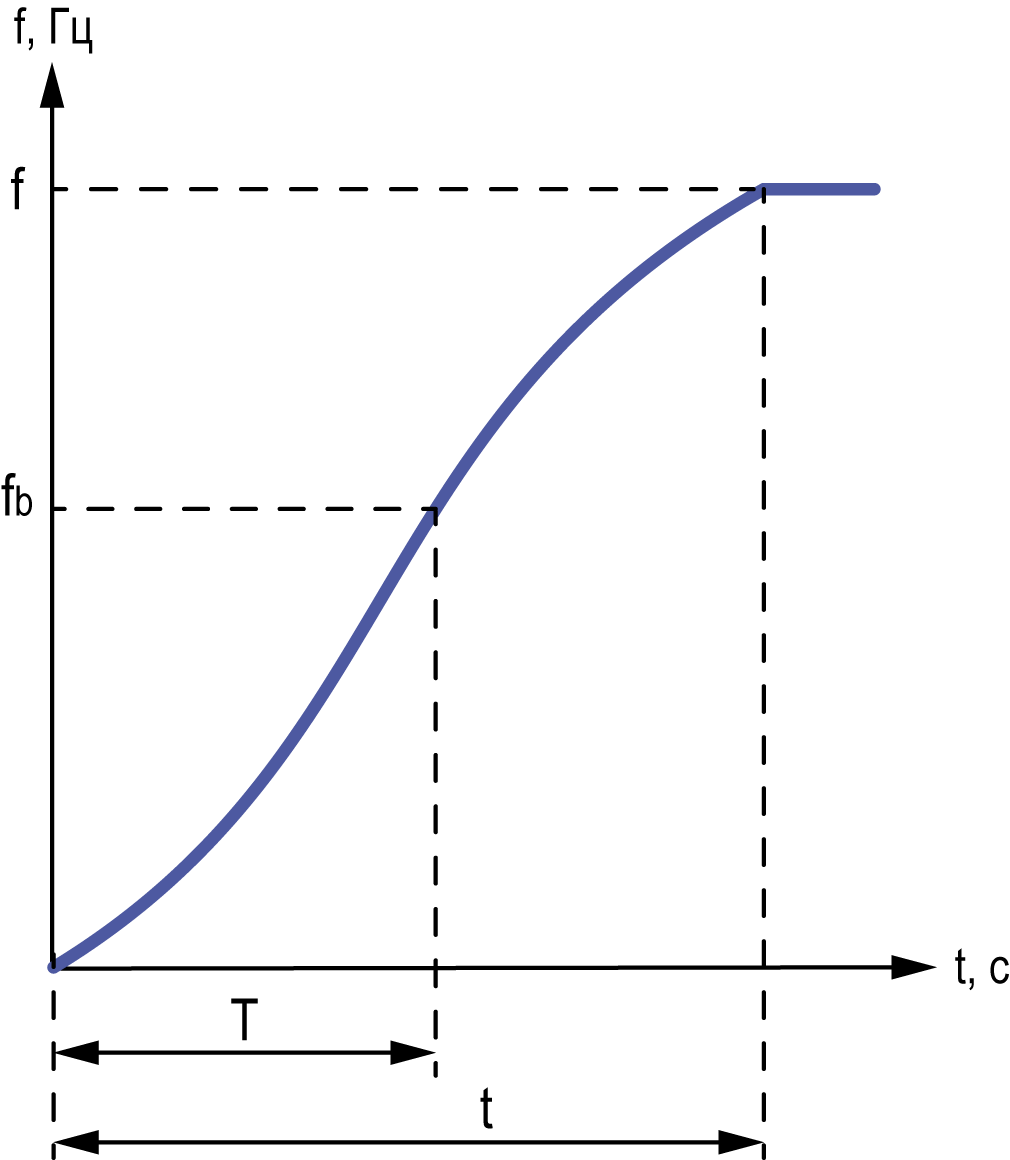
2: S-образная кривая разгона и торможения B
Выходная частота увеличивается или уменьшается в соответствии
с S-образной кривой, на которой номинальная частота двигателя fb всегда является точкой перегиба кривой (см. рисунок).
S-образная
кривая разгона и торможения B
Когда заданная
выходная частота f превышает номинальную частоту двигателя fb, время разгона и торможения t рассчитывается по формуле:
где
t – время разгона и торможения,
с;
f – заданная выходная частота, Гц;
fb –
номинальная частота двигателя, Гц;
T – время разгона выходной
частоты от 0 Гц до частоты fb, с.
Параметры F1.08 и F1.09
F1.08
Пропорция времени начала S-образной
кривой разгона и торможения
Значение по умолчанию
30 %
Диапазон значений
0.0 % – 70.0 %
F1.09
Пропорция времени конца S-образной
кривой разгона и торможения
Значение по умолчанию
30 %
Диапазон значений
0.0 % – 70.0 %
Параметр F1.08 устанавливает пропорцию начального участка S-образной
кривой разгона и торможения А относительно времени разгона (торможения).
Параметр F1.09 устанавливает пропорцию конечного участка S-образной
кривой разгона и торможения А относительно времени разгона (торможения).
Сумма значений параметров F1.08 и F1.09 не может превышать 100% (F1.08 + F1.09 ≤ 100
%).
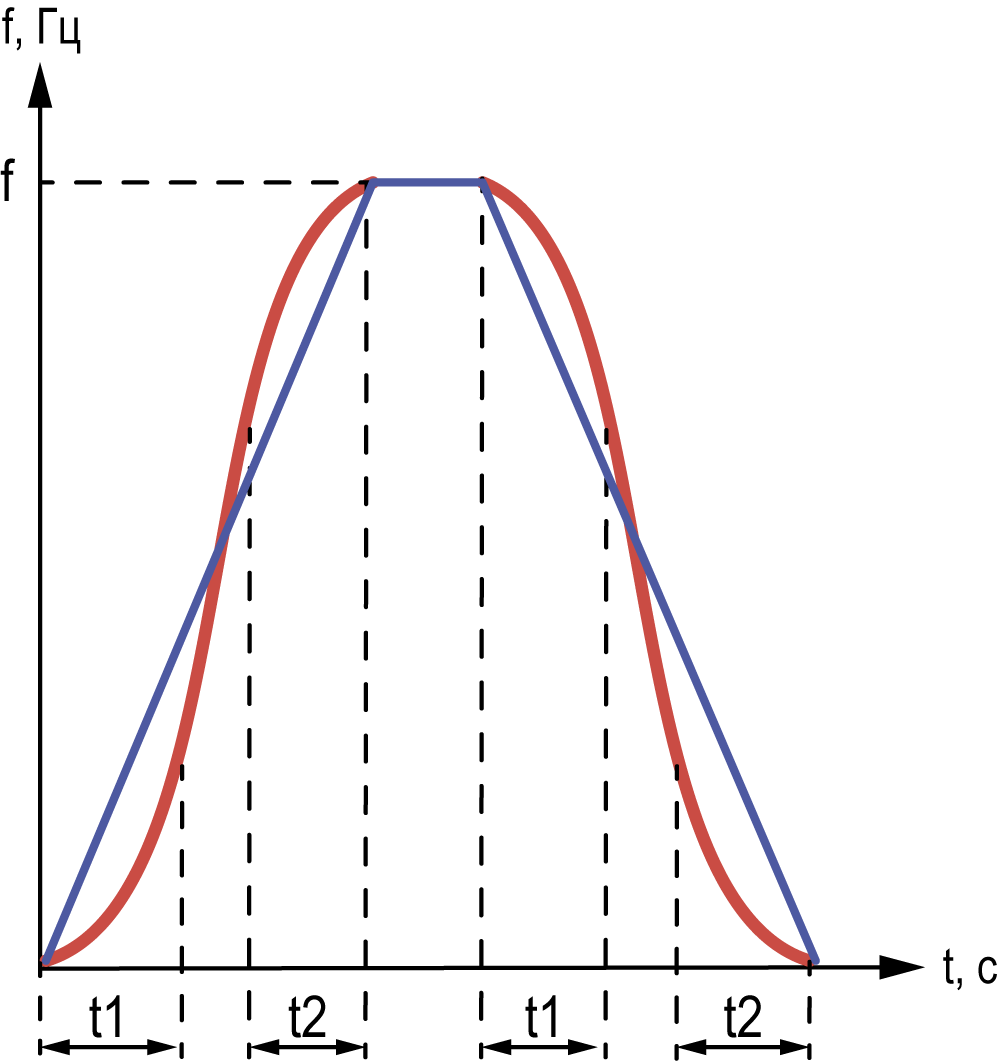
S-образная кривая разгона и торможения А приведена на рисунке.
S-образная
кривая разгона и торможения А
f – заданная выходная частота
Время t1 определяется значением параметра F1.08 (начальный
участок S-образной кривой). В течение времени t1 наклон изменения
выходной частоты постепенно увеличивается.
Время t2 определяется параметром F1.09 (конечный
участок S-образной кривой). В течение времени t2 наклон изменения
выходной частоты постепенно уменьшается до нуля.
В течение времени между t1 и t2 наклон изменения выходной частоты
фиксирован.
Параметр F1.10
F1.10
Режим останова
Значение по умолчанию
0
Диапазон значений
0
Останов с торможением
1
Останов выбегом
0: Останов с торможением
После подачи команды
на останов ПЧВ снижает выходную частоту в соответствии с заданным
режимом замедления и временем ускорения/замедления.
1: Останов выбегом
После подачи команды
на останов ПЧВ перестает подавать напряжение на двигатель, время торможения
зависит только от инерционности нагрузки.
Параметры F1.11 – F1.14
F1.11
Частота срабатывания торможения постоянным
током при остановке
Значение по умолчанию
0.00 Гц
Диапазон значений
0.00 Гц – максимальная выходная частота
F1.12
Время ожидания торможения постоянным
током при остановке
Значение по умолчанию
0.0 с
Диапазон значений
0.0 с – 36.0 с
F1.13
Ток торможения постоянным током при
остановке
Значение по умолчанию
0 %
Диапазон значений
0 % – 100 %
F1.14
Время торможения постоянным током
при остановке
Значение по умолчанию
0.0 с
Диапазон значений
0.0 с – 36.0 с
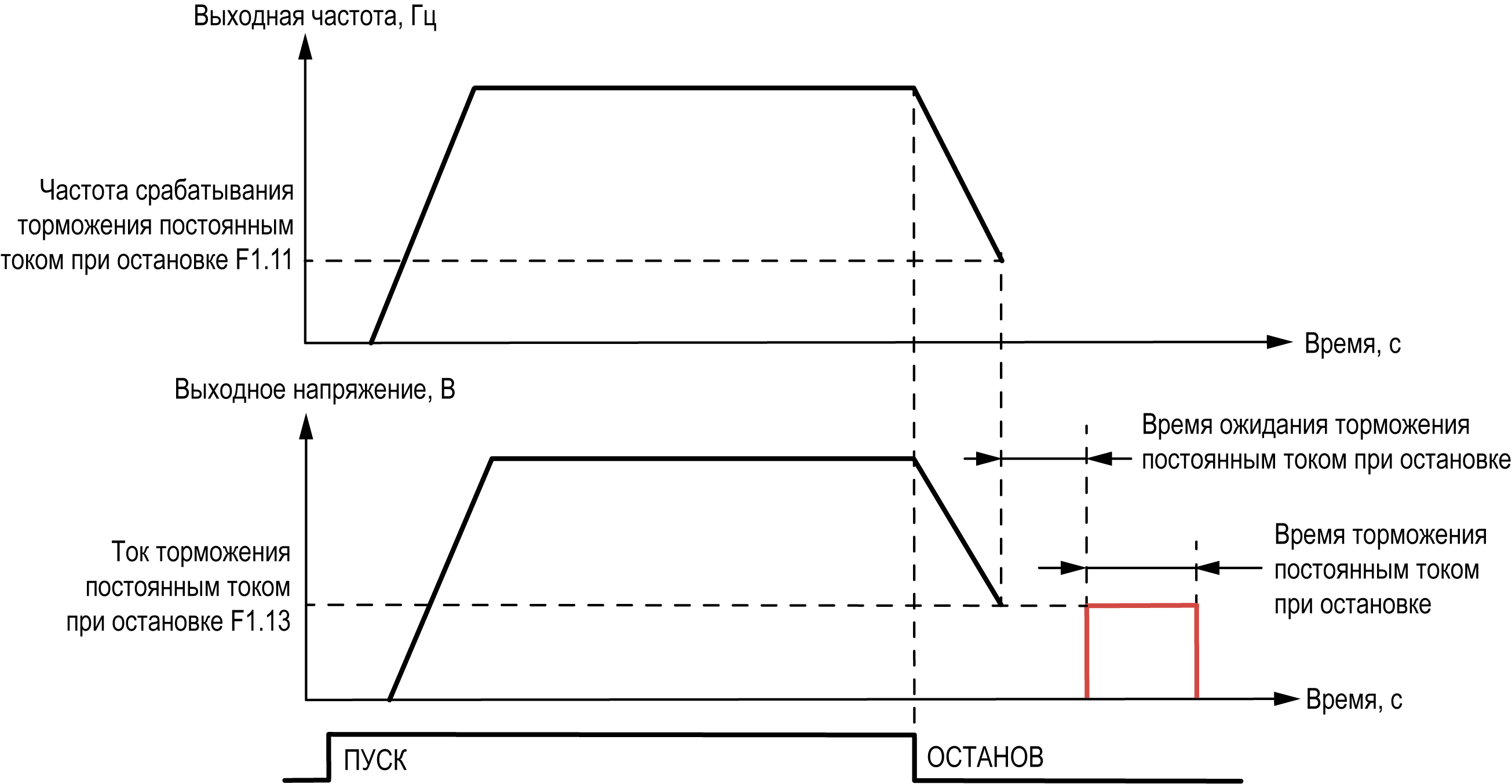
Частота срабатывания торможения постоянным током при
остановке F1.11
После получения команды останова, во время
замедления, когда значение выходной частоты становится меньше значения
частоты, заданного в параметре F1.11, начнется процесс удержания вала двигателя постоянным током. Время
задержки включения удержания вала постоянным током после достижения
частоты срабатывания F1.11 устанавливается
в параметре F1.12.
Время ожидания торможения постоянным током при остановке
F1.12
В данном параметре задается время задержки включения
удержания вала постоянным током после достижения частоты срабатывания F1.11.
Когда выходная частота снижается до частоты
срабатывания F1.11, ПЧВ отключает
напряжение на выходе и начинает отсчет времени. По истечении времени
задержки, заданного в параметре F1.12, включается удержание вала двигателя постоянным током. Данный алгоритм
используется для предотвращения перегрузки по току, вызванной торможением
постоянным током на высокой скорости.
Ток торможения постоянным током при остановке F1.13
В данном параметре задается величина постоянного тока удержания
вала при останове двигателя. Чем выше задаваемое значение, тем больше
усилие удержания вала.
Примечание
Значение, задаваемое в
параметре F1.13, рассчитывается как процентное
отношение к номинальному выходному току ПЧВ
Время торможения постоянным током при остановке F1.14
В данном параметре задается время удержания вала постоянным током
при останове двигателя.
Процесс удержания вала двигателя постоянным током при останове
приведен на рисунке.
Удержание
вала двигателя постоянным током при останове
Параметр F1.15
F1.15
Коэффициент использования тормозного
блока
Значение по умолчанию
100 %
Диапазон значений
0 % – 100 %
Данный параметр используется для преобразователей со встроенным
тормозным ключом. С помощью данного параметра можно регулировать тормозной
эффект от динамического торможения.
Параметр F1.16
F1.16
Выбор выходного сигнала на нулевой частоте
Значение по умолчанию
0
Диапазон значений
0
Открыто
1
Закрыто
Значение в данном параметре разрешает или запрещает выдачу выходного
напряжения ПЧВ при рабочей частоте равной нулю:
Открыто – выход ПЧВ включен, выдача выходного напряжения
разрешена;
Закрыто – выход ПЧВ отключен, выдача выходного напряжения
запрещена.
Группа F2: Параметры двигателя
Параметры F2.00 – F2.05
F2.00
Тип электродвигателя
Значение по умолчанию
0
Диапазон значений
0
Асинхронный электродвигатель
1
Частотно-регулируемый асинхронный двигатель
2
Синхронный электродвигатель с постоянными магнитами
3
Однофазный асинхронный электродвигатель
F2.01
Номинальная мощность электродвигателя
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.1 кВт – 400.0 кВт
F2.02
Номинальное напряжение электродвигателя
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0 В – 440 В
F2.03
Номинальный ток электродвигателя
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.01 A – 655.35 А (для ПЧВ мощностью
не более 55 кВт)
Значения параметров F2.00 – F2.05 необходимо
задавать в соответствии с данными, приведенными на шильдике двигателя.
Для полноценной работы векторного режима управления требуется
проведение автоматической подстройки двигателя (после задания значений
параметров F2.00 – F2.05 в соответствии с данными шильдика
двигателя).
Если мощность двигателя на несколько ступеней отличается от
номинальной мощности ПЧВ, то эффективность управления ПЧВ значительно
снижается.
Параметры F2.06 – F2.10
F2.06
Сопротивление статора электродвигателя
Значение
по умолчанию
В зависимости
от модификации ПЧВ
Диапазон значений
0.001 Ом – 65.535 Ом (для ПЧВ мощностью не более 55 кВт)
0.0001
Ом – 6.5535 Ом (для ПЧВ мощностью более 55 кВт)
F2.07
Сопротивление ротора электродвигателя
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.001 Ом – 65.535 Ом (для ПЧВ мощностью не более 55 кВт)
0.0001
Ом – 6.5535 Ом (для ПЧВ мощностью более 55 кВт)
F2.08
Индуктивность утечки статора электродвигателя
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.01 мГн – 655.35 мГн (для ПЧВ мощностью не более 55 кВт)
0.001
мГн – 65.535 мГн (для ПЧВ мощностью более 55 кВт)
F2.09
Взаимная индуктивность электродвигателя
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.1 мГн – 6553.5 мГн (для ПЧВ мощностью не более 55 кВт)
0.01
мГн – 655.35 мГн (для ПЧВ мощностью более 55 кВт)
F2.10
Ток холостого хода электродвигателя
Значение по умолчанию
В зависимости от модификации ПЧВ
Диапазон значений
0.01 A – F2.03 (для ПЧВ мощностью не более 55 кВт)
После успешного проведения автоматической подстройки двигателя
(см. параметр F2.11) значения параметров F2.06 – F2.10 автоматически обновляются.
После изменения значения номинальной мощности двигателя в параметре F2.01 произойдет автоматический сброс до заводских значений параметров F2.06 – F2.10.
Если, по каким-либо причинам, возможность выполнения автоматической
подстройки двигателя отсутствует, можно задать значения параметров F2.06 – F2.10 вручную.
Параметр F2.11
F2.11
Тип автоподстройки электродвигателя
Значение
по умолчанию
0
Диапазон значений
0
Без автоподстройки
1
Автоподстройка без вращения
2
Автоподстройка с вращением
Внимание
Перед выполнением автоподстройки в ПЧВ должны
быть корректно записаны параметры электродвигателя (F2.00 – F2.05)
0: Без автоподстройки
Если в параметре F2.11 задано значение 0, то автоподстройка не выполняется.
1: Автоподстройка без вращения
Данный тип
автоподстройки подходит для случаев, когда нет возможности снять рабочий
механизм с вала двигателя для обеспечения работы на холостом ходу.
Для запуска автоподстройки следует записать в параметр F2.11 значение 1 и нажать кнопку «ПУСК» на панели оператора, после чего
будет запущен процесс статической подстройки.
2: Автоподстройка c вращением
Рекомендуемый
тип проведения автоматической подстройки двигателя. Автоподстройка
должна проходить на холостом ходу, а вал двигателя должен быть освобожден
от нагрузки.
Для запуска автоподстройки следует записать в параметр F2.11 значение 2 и нажать кнопку на панели оператора, после чего
будет запущен процесс подстройки с вращением.
Процесс автоподстройки
с вращением выполняется в два этапа:
После запуска автоподстройки двигатель разгоняется до 80% от
номинальной частоты в соответствии с временем разгона, заданным в
параметре F0.18, и некоторое время
продолжает работу на установившейся скорости – в течении данного времени
выполняется статическая подстройка.
После завершения этапа статической подстройки ПЧВ плавно снизит
скорость до нуля в соответствии с временем торможения, заданным в
параметре F0.19.
Для остановки двигателя во время автоподстройки достаточно нажать
на кнопку .
После проведения автоподстройки значение параметра F2.11 автоматически возвращается в 0.
Примечание
Для достижения максимального эффекта от автоподстройки,
ее рекомендуется проходить с заводскими значениями времени разгона
(параметр F0.18) и торможения
(параметр F0.19), а также выбрав
в качестве источника подачи сигнала запуска клавиатуру панели управления
(в параметре F0.01 задано значение
0).
Параметр F2.12
F2.12
Тип нагрузки
Значение
по умолчанию
В зависимости
от модификации ПЧВ
Диапазон значений
1
Общее применение (G) (для механизмов
с постоянной нагрузкой)
2
Насос / вентилятор (P) (Для механизмов
с зависимой от скорости нагрузкой)
Данный параметр используется для отображения нагрузки, на которую
рассчитан преобразователь частоты.
Параметр F2.13
F2.13
Коэффициент трансформации (для однофазных
двигателей)
Значение
по умолчанию
140
Диапазон значений
50 – 200
Значение, задаваемое в данном параметре, позволяет откорректировать
ток однофазного двигателя, изменив его коэффициент трансформации.
Значение параметра участвует в работе только в случае, когда в качестве
подключаемого двигателя указан однофазный двигатель (в параметре F2.00 задано значение 3).
Группа F3: Векторное управление
Группа параметров F3 предназначена для векторного управления
преобразователем частоты (когда в параметре F0.00 задано значение
0). В скалярном режиме (когда в параметре F0.00 задано значение
1) параметры группы F3 не влияют на работу преобразователя
частоты.
Параметры F3.00 – F3.05
F3.00
Пропорциональный коэффициент 1
Значение
по умолчанию
30
Диапазон значений
1 – 100
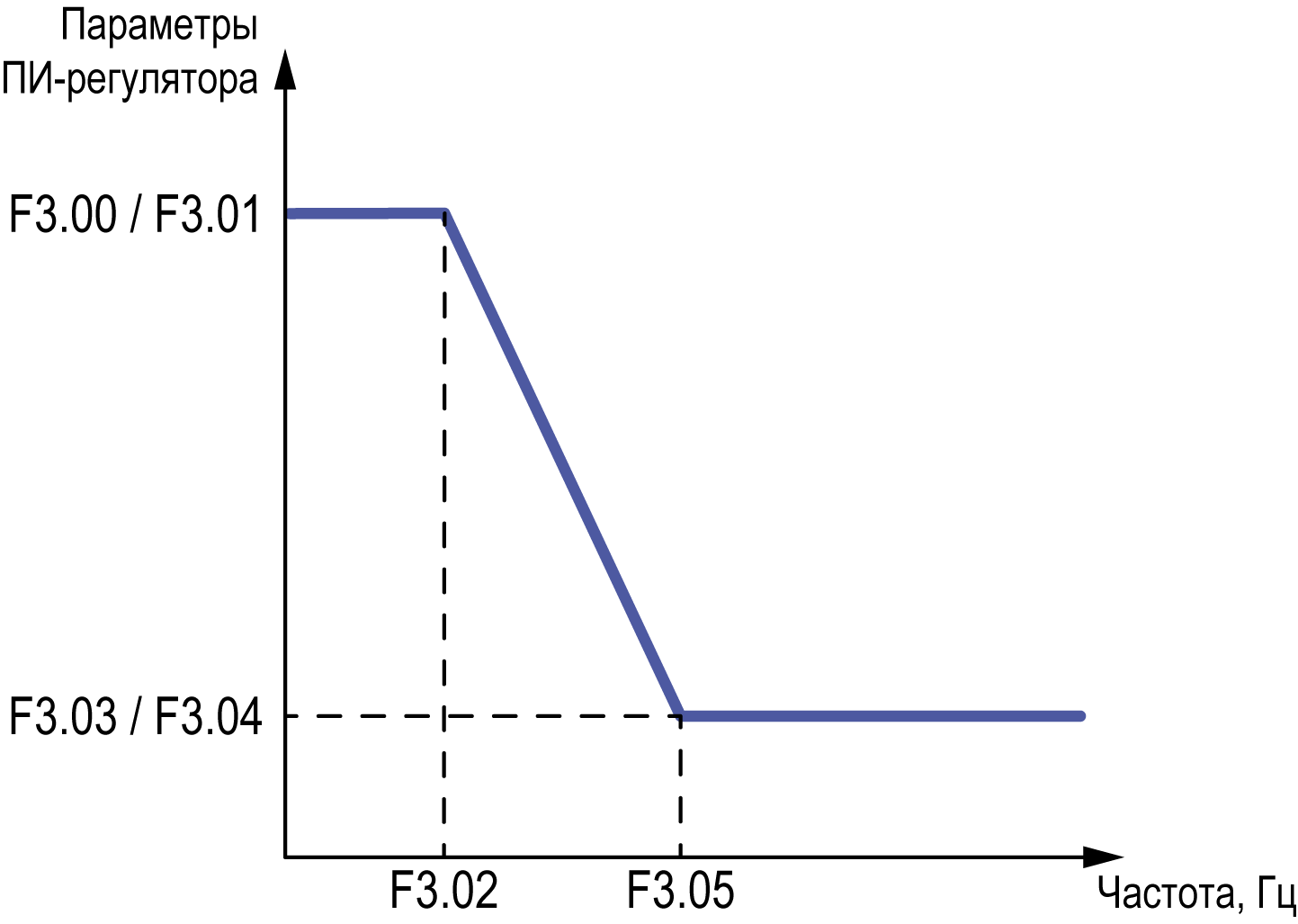
Параметры F3.00 и F3.01 являются коэффициентами ПИ-регулятора,
когда рабочая частота ниже частоты переключения 1 (параметр F3.02).
Параметры F3.03 и F3.04 являются коэффициентами ПИ-регулятора
для полосы частот между рабочей частотой и частотой переключения 2
(параметр F3.05).
Параметры ПИ-регулятора в полосе частот между частотой переключения
1 и частотой переключения 2 представляют собой линейное переключение
двух наборов параметров, как показано на рисунке.
Диаграмма
переключения параметров ПИ-регулятора
При помощи настройки коэффициента пропорциональности и времени
интегрирования регулятора скорости, можно регулировать характеристики
динамического отклика векторного управления. Увеличение коэффициента
пропорциональности и уменьшение времени интегрирования может ускорить
динамический отклик контура скорости. Если коэффициент пропорциональности
слишком велик или время интегрирования слишком мало, система может
выйти за пределы устойчивости.
Рекомендуемый метод настройки ПИ-регулятора:
Если заводские параметры ПЧВ не удовлетворяют требованиям системы,
выполните их точную настройку в следующей последовательности:
сначала увеличьте значение пропорционального коэффициента,
чтобы исключить колебания системы;
затем уменьшите время интегрирования, чтобы система имела более
быстрый отклик и меньшую перегрузку.
Примечание
Неправильная настройка коэффициентов ПИ-регулятора
может привести к чрезмерному превышению скорости. Даже если после
этого перерегулирование уменьшится, то возникнет ошибка перенапряжения.
Параметр F3.06
F3.06
Компенсация скольжения
Значение
по умолчанию
100 %
Диапазон значений
50 % – 200 %
В режиме векторного управления без обратной связи по скорости этот
параметр используется для стабилизации скорости двигателя. При корректном
задании значения компенсации скольжения, фактическая скорость вращения
при большой нагрузке будет приближаться к скорости вращения на холостом
ходу.
Параметр F3.07
F3.07
Время фильтрации
Значение
по умолчанию
0.000 с
Диапазон значений
0.000 с – 0.100 с
Как правило, данный параметр не требует изменений во время работы,
однако его можно увеличить если наблюдаются колебания выходной частоты.
При низком значении времени фильтра достигается быстрая реакция двигателя
на изменение нагрузки, но могут быть скачки крутящего выходного момента.
Параметр F3.08
F3.08
Ограничение момента в режиме управления
по регулированию скорости
Значение
по умолчанию
150 %
Диапазон значений
0.0 % – 200.0 %
В режиме управления по регулированию скорости максимальный выходной
крутящий момент зависит от значения параметра F3.08. Значение данного параметра задается в процентах от значения номинального
крутящего момента двигателя.
Параметр F3.09
F3.09
Режим регулирования
Значение по умолчанию
0
Диапазон значений
0
Регулирование скорости
1
Управление
моментом
Выбор режима регулирования можно производить с помощью многофункциональных
дискретных входов, назначив на них функции:
«Контроль крутящего момента запрещен» (в параметре соответствующего
дискретного входа F5.00 – F5.05 задано значение
29)
;
«Переключение режимов регулирования скорости/управления моментом»
(в параметре соответствующего дискретного входа F5.00 – F5.05 задано значение
46).
Если сигнал на дискретном входе с назначенной функцией «Контроль
крутящего момента запрещен» активен (дискретный вход замкнут), то
ПЧВ работает в режиме регулирования скорости.
Если сигнал на дискретном входе с назначенной функцией «Контроль
крутящего момента запрещен» неактивен (дискретный вход разомкнут),
то контроль крутящего момента разрешен и выбор режима регулирования
осуществляется другим дискретным входом, на который назначена функция
«Переключение режимов регулирования скорости/управления моментом».
При этом, логика работы дискретного входа с назначенной функцией «Переключение
режимов регулирования скорости/управления моментом» следующая:
если этот дискретный вход разомкнут, то режим регулирования
определяется значением, заданным в параметре F3.09;
если этот дискретный вход замкнут, режим регулирования меняется
на противоположный.
В режиме управления моментом рабочая частота ПЧВ задается параметрами F3.12 и F3.13, а время разгона и торможения – параметрами F3.14 и F3.15 соответственно.
Минимальное значение сигналов аналоговых
входов AI1 и AI2
7
Максимальное значение сигналов аналоговых
входов AI1 и AI2
Максимальные значения сигналов (данных) всех выбираемых источников
(значения от 1 до 7) соответствуют значению, заданному в параметре F3.11
Параметр F3.10 служит для выбора источника задания ограничения
момента в режиме управления моментом (когда в параметре F3.09 задано значение 1).
Если, например, в качестве источника задания ограничения момента
используется аналоговый вход, то максимальное значение входного аналогового
сигнала соответствует значению, заданному в параметре F3.11. Значение параметра F3.11 задается в процентах от номинального крутящего момента двигателя
(заданное значение 100% соответствует номинальному значению крутящего
момента).
Параметры F3.12 и F3.13
F3.12
Максимальная частота в прямом направлении
вращении в режиме управления моментом
Параметры F3.12 и F3.13 служат для установки требуемой
максимальной выходной частоты ПЧВ в режиме управления моментом.
Параметры F3.14 и F3.15
F3.14
Время разгона в режиме управления моментом
Значение
по умолчанию
0.00 с
Диапазон значений
0.00 с – 65000 с
Параметры F3.14 и F3.15 служат для установки требуемого
времени разгона и времени торможения двигателя в режиме управления
моментом.
Параметр F3.16
F3.16
Коэффициент жесткости крутящего момента
Значение
по умолчанию
100.0 %
Диапазон значений
10.0 % – 120.0 %
В параметре F3.16 задается значение коэффициента,
обеспечивающего стабилизацию работы ПЧВ в режиме управления крутящим
моментом. Значение коэффициента подбирается в зависимости от величины
крутящего момента двигателя.
Для получения стабильного эффекта управления значение коэффициента
может быть:
Параметры F3.17 – F3.20 служат для управления контуром
тока в системе координат «MT» и системе координат «dq» синхронного
двигателя. Данные параметры будут определены автоматически после полной
идентификации параметров (т. е. после проведения автоподстройки с
вращением) и, как правило, не требуют изменения.
Полоса пропускания контура тока напрямую определяет скорость реакции
электромагнитного момента. Если параметры настройки завышены, то контур
тока будет выходить из устойчивой работы, вызывая колебания всего
контура управления.
Если наблюдаются колебания тока/момента, то можно вручную подкорректировать
значения этих параметров.
Параметр F3.21
F3.21
Интегральное разделение контура скорости
Значение
по умолчанию
0
Диапазон значений
0
Неактивно
1
Активно
В данном параметре рекомендуется задать значение 1, если условия
работы двигателя предусматривают частые переходные процессы с большими
изменениями нагрузки, а также, если в системе управления наблюдаются
колебания или перерегулирования.
Если система, в основном, работает в стабильных режимах с малыми
отклонениями или нужна высокая точность скорости и минимальная остаточная
ошибка, то в данном параметре рекомендуется оставить значение 0, заданное
по умолчанию.
Параметры F3.24 и F3.25
F3.24
Коэффициент компенсации трения в режиме
управления моментом
Значение
по умолчанию
100
Диапазон значений
100 – 300
В режиме управления моментом при подаче команды на пуск обеспечивается
возможность компенсации трения при вращении вала двигателя. Компенсация
трения осуществляется посредством задания требуемого значения коэффициента
компенсации трения в параметре F3.24. При этом, крутящий момент двигателя с учетом компенсации трения
рассчитывается по формуле:
где
Мкомп.тр – крутящий момент двигателя с учетом компенсации
трения, % от номинального крутящего момента двигателя;
F3.11 – заданное значение параметра F3.11, % от номинального крутящего момента двигателя;
В параметре F3.25 задается время,
в продолжение которого будет действовать компенсация трения, начиная
с запуска. По истечении времени, заданного в данном параметре, предустановленное
значение ограничения момента определяется только значением параметра F3.11.
Группа F4: Управление в режиме U/F
Группа параметров F4 предназначена для скалярного управления
преобразователем частоты (когда в параметре F0.00 задано значение 1). В векторном
режиме (когда в параметре F0.00 задано значение 0) параметры группы F4 не влияют на работу преобразователя частоты.
Скалярный режим работы подходит как для общепромышленной нагрузки,
так и для нагрузки с переменным моментом сопротивления (насосы, вентилятор
и т. д.). Также скалярный режим подойдет для управления сразу несколькими
двигателями (например, группой вентиляторов), или для случаев, когда
модификация ПЧВ на несколько ступеней выше по мощности чем подключаемый
электродвигатель.
Параметр F4.00
F4.00
Выбор типа кривой U/f
Значение по умолчанию
0
Диапазон значений
0
Линейная зависимость U/f
1
Пользовательская настройка U/f
2
Квадратичная зависимость U/f
3 – 9
Резерв
10
Полное разделение задания напряжения и частоты U/F
11
Частичное разделение задания напряжения и частоты
0: Линейная зависимость U/f
Данный тип зависимости
лучше всего подходит для общепромышленной нагрузки с постоянным моментом
сопротивления.
1: Пользовательская настройка U/f
Подходит для специфических нагрузок: позволяет пользователю построить
функцию U/f по трем точкам (см. параметры F4.03 – F4.08).
2: Квадратичная зависимость U/f
Данный тип зависимости подходит для вращающихся рабочих механизмов,
момент сопротивления которых пропорционален угловой скорости (вентиляторы,
насосы, центрифуги и т. д.).
10: Полное разделение задания напряжения и частоты
U/F
Выходное напряжение задается в соответствии с источником, заданным
в параметре F4.13.
11: Частичное разделение задания напряжения и частоты
В этом случае сохраняется пропорция U/f, а источник напряжения F4.13 используется только для регулировки наклона
U/f.
Соотношение между выходным напряжением и частотой связано
с номинальным напряжением и номинальной частотой двигателя, заданными
в параметрах группы F2, и определяется по формуле:
где
X – значение входного сигнала источника
напряжения, % (от 0 до 100 %);
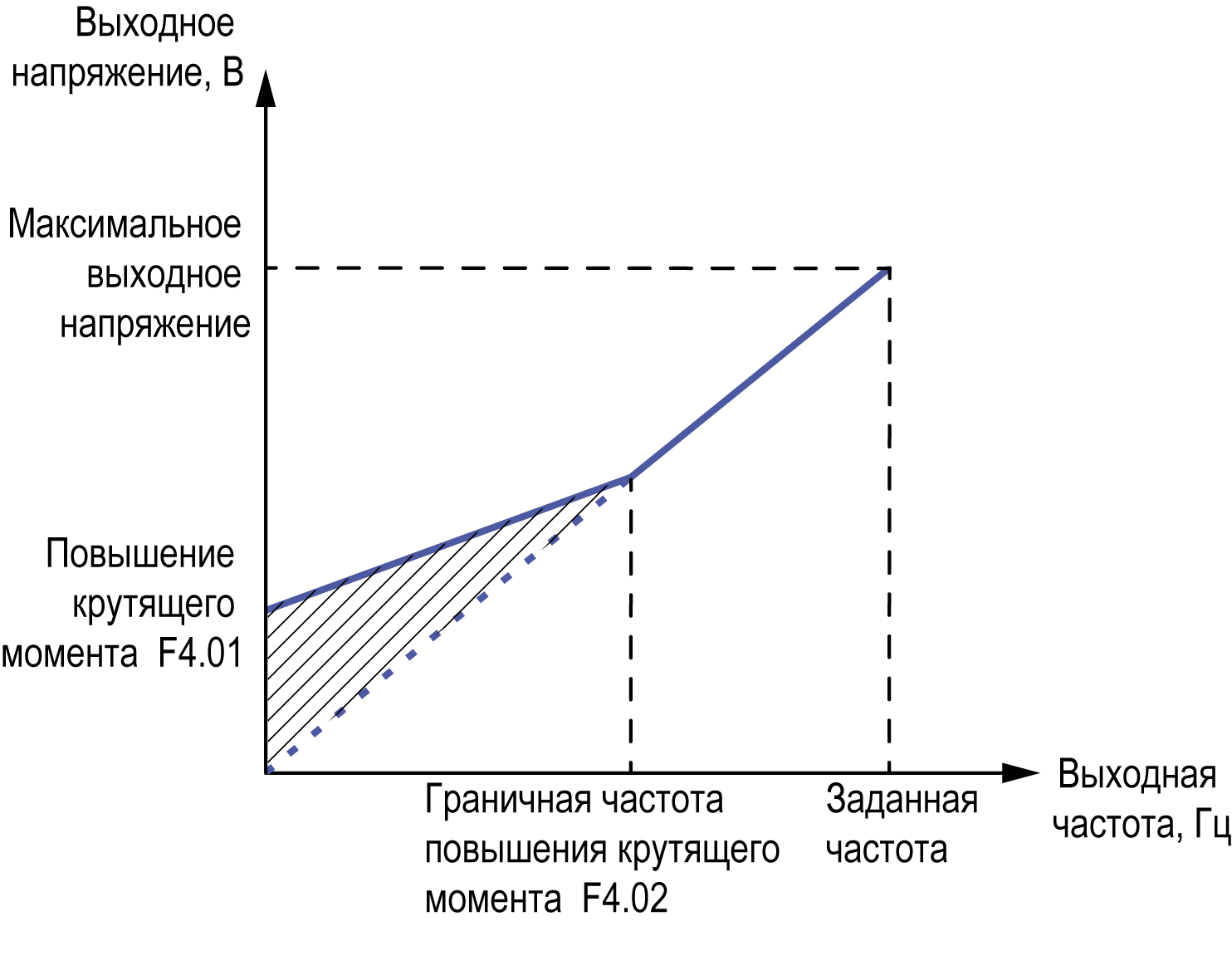
0.0 % – автоматическое повышение крутящего момента;
0.1 % –
30 % – ручное повышение крутящего момента.
В режиме скалярного управления ПЧВ может автоматически повышать
выходное напряжение, чтобы компенсировать недостающий крутящий момент
на малых значениях частоты.
В параметре F4.01 задается значение
повышения крутящего момента. Если задать слишком большое значение
данного параметра, двигатель будет быстро перегреваться, а ПЧВ выдаст
аварию о перегрузке. Как правило, значение повышения крутящего момента
в параметре F4.01 не должно превышать 8.0 %. Точная
настройка этого параметра позволяет избежать перегрузки по току при
запуске. С ростом нагрузки рекомендуется увеличить значение этого
параметра.
Когда в параметре повышения крутящего момента F4.01 задано значение 0.0 %, ПЧВ увеличивает крутящий момент автоматически.
В параметре F4.02 задается значение
граничной частоты повышения крутящего момента. Повышение крутящего
момента будет осуществляться только при значениях частоты ниже значения
граничной частоты, заданной в параметре F4.02. Диаграмма, иллюстрирующая работу повышения крутящего момента, приведена
на рисунке.
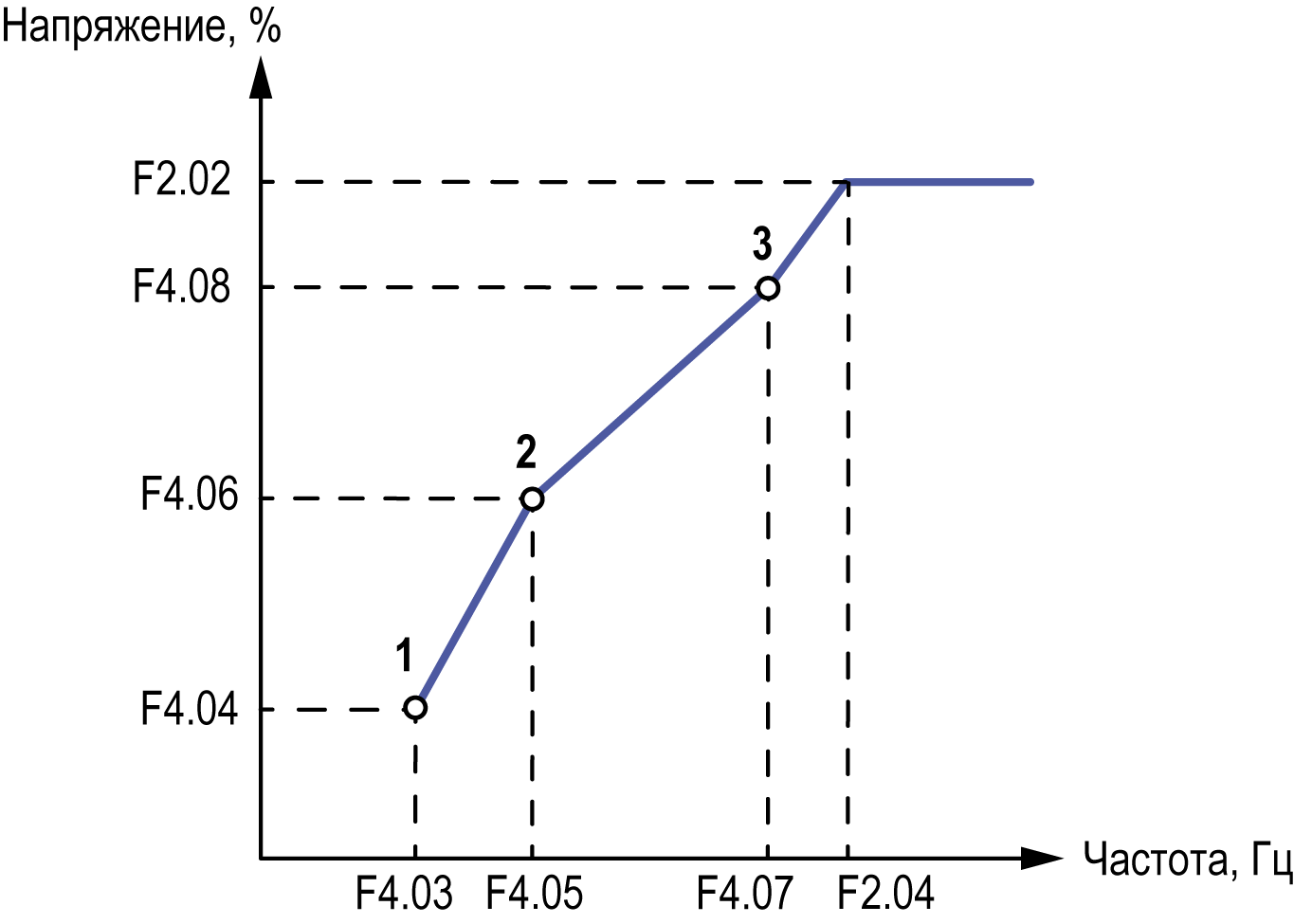
Шесть параметров F4.03 – F4.08 используются для построения пользовательской
кривой U/f. Их значения, как правило, устанавливаются в соответствии
с характеристиками нагрузки двигателя.
Значения параметров пользовательской настройки напряжения F4.04, F4.06 и F4.08 задаются в процентах от номинального напряжения
двигателя.
Примечание
Каждое последующее значение напряжения (U1, U2,
U3) и частоты (F1, F2, F3) не может быть ниже предыдущего, т. е. должно
выполняться условие:
U1 < U2 <
U3;
F1 < F2 <
F3.
Слишком высокое напряжение при низкой частоте может привести
к перегреву или даже к выходу двигателя из строя, а также к срабатыванию
защиты от перегрузки по току.
Вид пользовательской кривой U/f приведен на рисунке.
Пользовательская кривая U/f
Параметр F4.09
F4.09
Коэффициент компенсации скольжения
Значение
по умолчанию
0
Диапазон значений
0 – 200
Данный параметр служит для компенсации скольжения, вызванного нагрузкой
при работе в режиме скалярного управления U/f.
Как правило, значение 100 в параметре F4.09 соответствует номинальному скольжению при номинальной нагрузке двигателя.
При этом, реальная скорость двигателя, в основном, близка к скорости,
заданной через ПЧВ.
Параметр F4.10
F4.10
Коэффициент усиления перевозбуждения
U/F
Значение
по умолчанию
0
Диапазон значений
0 – 200
Параметр коэффициента усиления перевозбуждения U/F предназначен
для подавления роста напряжения на шине постоянного тока во время
торможения и предотвращения превышения предельного значения перенапряжения
и возникновения ошибки по перенапряжению.
Чем больше значение коэффициента усиления при перевозбуждении,
заданное в параметре F4.10, тем сильнее эффект
подавления.
Указания по настройке параметра:
При низкоинерционной нагрузке значение параметра F4.10 должно быть равным 0. Значение параметра следует
увеличивать по мере роста инерционности нагрузки;
Если используется тормозной резистор, значение параметра F4.10 должно быть равным 0.
Параметр F4.11
F4.11
Коэффициент подавления колебаний U/F
Значение
по умолчанию
В зависимости
от модификации ПЧВ
Диапазон значений
0 – 100
Данный параметр служит для подавления колебаний в режиме скалярного
управления U/f.
Если колебания отсутствуют, то значение этого параметра должно
быть равно нулю. Увеличивать его значение следует только в случае
наличия колебаний, мешающих нормальной работе ПЧВ.
При использовании данной функции значения, заданные в параметрах
номинального тока двигателя F2.03 и тока холостого
хода F2.10, должны быть максимально
приближены к фактическим значениям.
Параметр F4.12
F4.12
Источник задания напряжения для режима разделения U/f
Максимальные значения (100 %) сигналов / данных всех
выбираемых источников соответствуют значению номинального напряжения
двигателя.
0: Цифровой (F4.13)
Когда в параметре F4.12 задано значение
0, значение напряжения принимается равным значению, заданному в параметре F4.13.
1: Аналоговый вход AI1
2: Аналоговый
вход AI2
Напряжение изменяется пропорционально соответствующему входному
аналоговому сигналу. Максимальное входное значение аналогового сигнала
(100 %) соответствует номинальному напряжению двигателя, записанному
в параметре F2.02.
5: Мультискорости
Когда в параметре F4.12 задано значение
5, в качестве источника задания напряжения выбраны многофункциональные
дискретные входы с назначенной функцией “Многоскоростной вход 1...4”
(данная функция задается в параметрах группы F5, см. раздел). Значения выходного напряжения
(в процентах) задаются в параметрах FD.00 – FD.15 группы FD, где значение 100 % соответствует номинальному напряжению двигателя,
записанному в параметре F2.02.
Выбор выходного напряжения осуществляется комбинацией дискретных
входов.
6: Встроенный ПЛК
Настройка изменения выходного
напряжения задается в группе параметров встроенного ПЛК (группа параметров FD, см. раздел). Значение 100 % соответствует
номинальному напряжению двигателя, записанному в параметре F2.02
7: ПИД-регулятор
Когда в параметре F4.12 задано значение 7, в качестве источника задания
выходного напряжения выбран ПИД-регулятор. В данном случае выходное
напряжение будет генерироваться в соответствии с функцией замкнутого
контура ПИД-регулятора. Настройка ПИД-регулятора осуществляется при
помощи параметров группы F9 (см. раздел).
8: RS-485
Когда в параметре F4.12 задано значение 8, в качестве источника задания
выходного напряжения выбран мастер сети RS-485, подключенный к интерфейсному
порту RS-485 ПЧВ. Значение выходного напряжения определяется данными,
поступающими на ПЧВ от мастера сети RS-485 по протоколу Modbus RTU.
Параметр F4.13
F4.13
Цифровая настройка напряжения в режиме
разделения U/f
Когда в параметре F4.12 задано значение
0, то значение выходного напряжения равно значению, заданному в параметре F4.13.
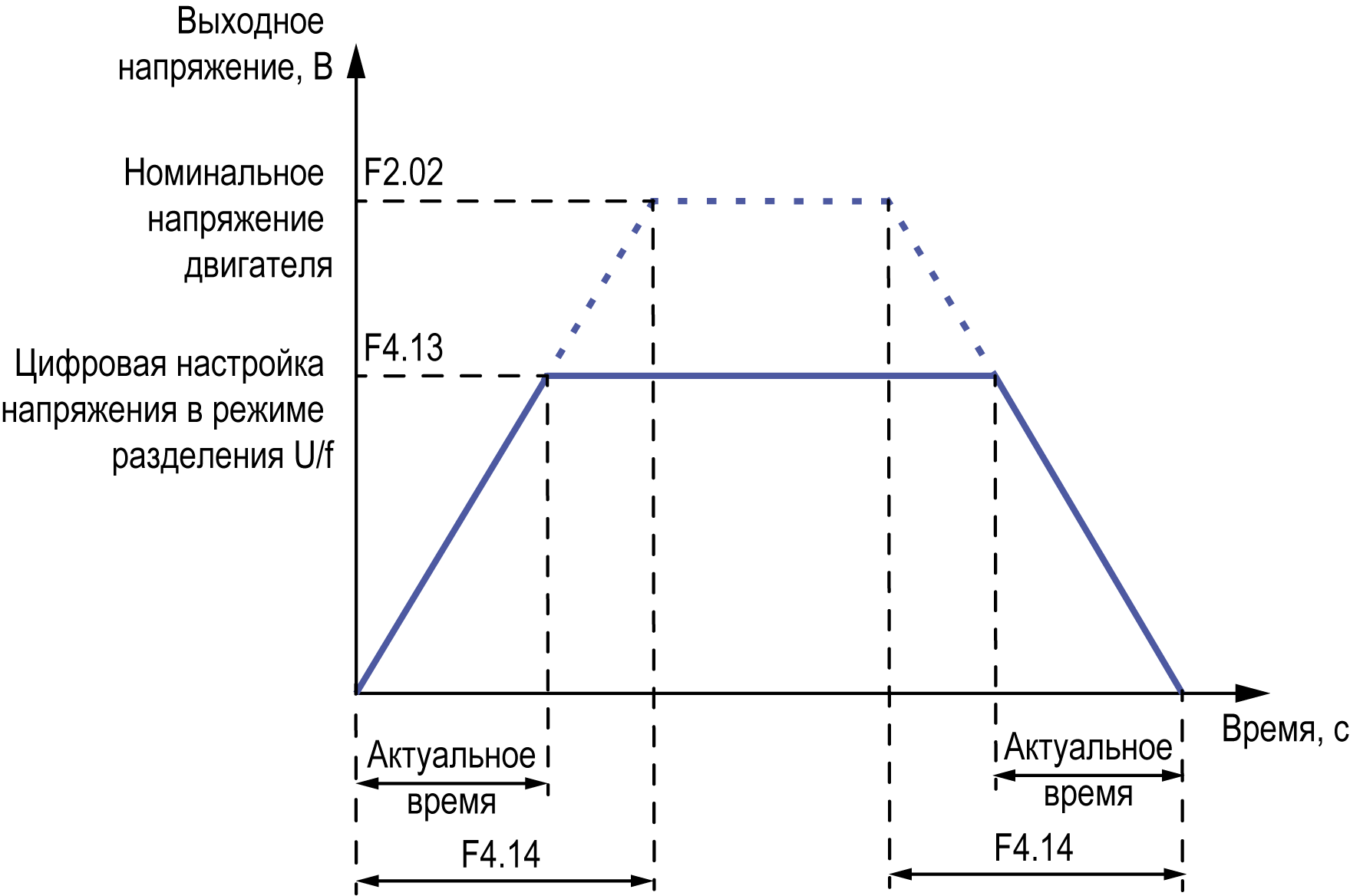
Параметр F4.14
F4.14
Время нарастания напряжения в режиме
разделения U/f
Значение
по умолчанию
0.0 с
Диапазон значений
0.0 с – 1000.0 с
Значение, задаваемое в данном параметре (время нарастания напряжения
в режиме разделения U/f) – это время, необходимое для изменения выходного
напряжения от 0 В до номинального напряжения двигателя, заданного
в параметре F2.02 (разгон). Значение
данного параметра также определяет время изменения выходного напряжения
от значения, заданного в параметре F2.02 до 0 В (торможение).
Алгоритм работы показан на рисунке.
Время
разгона и торможения в режиме разделения U/f
Параметр F4.16
F4.16
Автоматическое регулирование напряжения
Значение
по умолчанию
1
Диапазон значений
0
Выключено
1
Активно при останове с торможением
2
Активно при постоянной скорости
3
Включено
Для выбора режима работы автоматического регулирования выходного
напряжения следует задать соответствующее значение в параметре F4.16.
Группа F5: Входные клеммы
На преобразователе частоты располагаются входные клеммы дискретных
и аналоговых входов, включающие в себя:
шесть многофункциональных дискретных (DI1...DI6) входов, один
из которых (DI6) является импульсным и поддерживает работу с сигналами
частотой до 20 кГц;
два аналоговых входа (AI1 и AI2), из которых:
один аналоговый вход (AI1) предназначен для приема сигнала
напряжения 0...10 В;
один универсальный аналоговый вход (AI2) предназначен для приема
сигнала напряжения 0...10 В или сигнала тока 4...20 мА.
Группа параметров F5 используется для настройки работы многофункциональных
дискретных входов и аналоговых входов прибора.
Значения параметров F5.00 – F5.05, F5.10 и соответствующие
доступные функции которые можно назначить на каждый дискретный вход
приведены в таблице.
Диапазон значений параметров F5.00 – F5.05, F5.10 и соответствующие
доступные функции
Значение
Функция
Описание
0
Нет функции
Исключает дискретный вход из работы.
1
Пуск в прямом направлении
Позволяет производить пуск в прямом
и обратном направлении, когда в качестве источника команды на запуск
стоит дискретный вход (в параметре F0.01 задано значение
1).
2
Пуск в обратном направлении
3
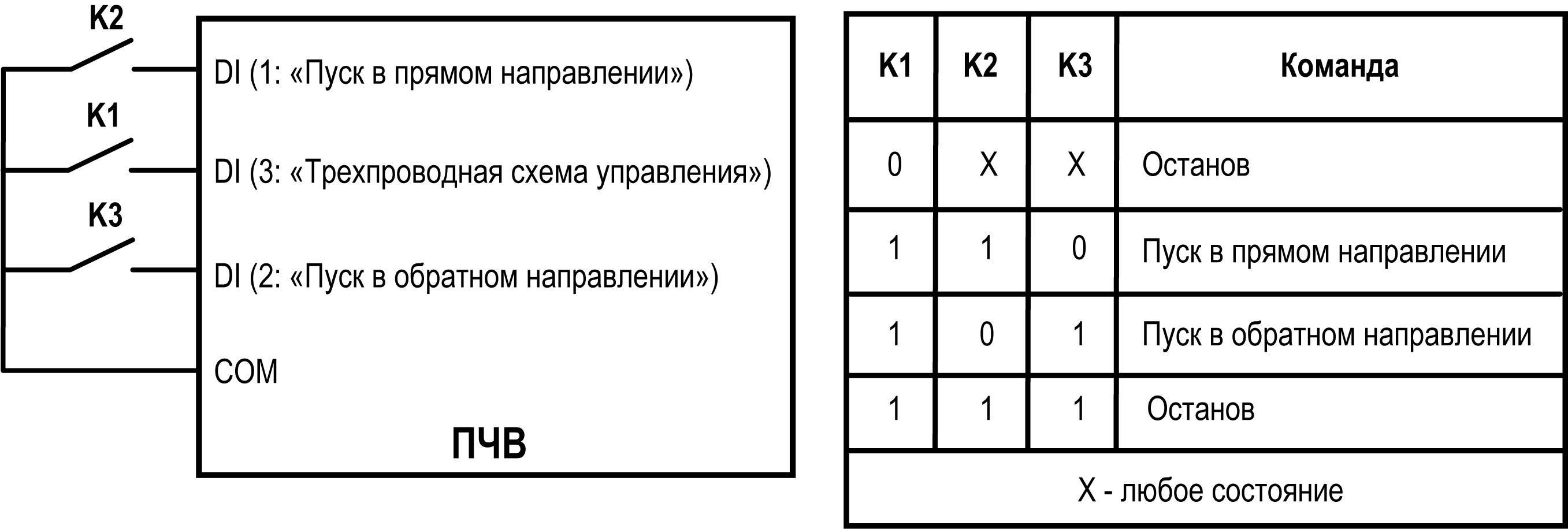
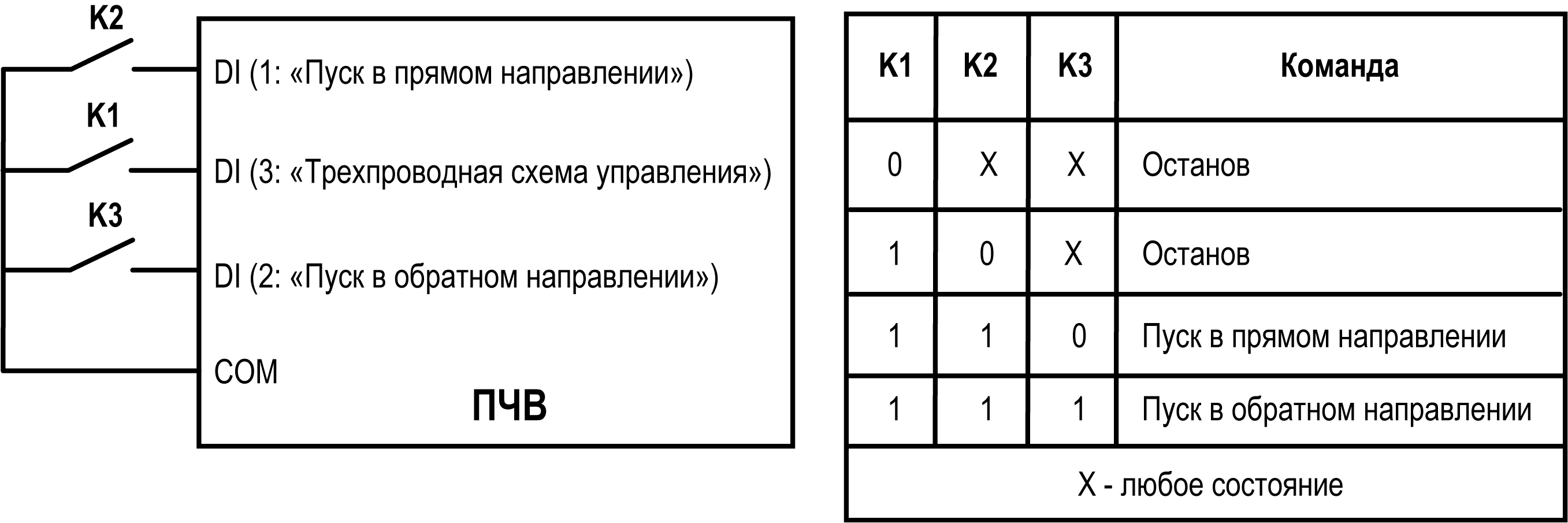
Трехпроводная схема управления
Используется для построения трехпроводных схем управления. Примеры
этих схем приведены в описании к параметру F5.16.
4
Фиксированная скорость в прямом направлении
Переводит ПЧВ в “Толчковый режим”
или режим работы на фиксированной скорости. Функция работает совместно
с параметрами F8.00, F8.01, F8.02.
5
Фиксированная скорость в обратном направлении
6
Увеличение частоты
Данные значения используются для назначения
дискретным входам функции “цифрового потенциометра”, когда в качестве
источника задания частоты применяется предустановленное значение.
Изменение значения устанавливаемой частоты происходит до тех пор,
пока на дискретном входе присутствует активный сигнал
7
Уменьшение частоты
8
Останов выбегом
ПЧВ отключает силовой выход и двигатель
продолжает вращение по инерции.
Данная функция аналогична функции
“останов выбегом”, задаваемая в параметре F1.10.
9
Сброс аварии
Используется для сброса аварии по
дискретному сигналу (в дополнение к нажатию кнопки “СТОП/СБРОС” на
клавиатуре панели управления).
10
Пауза
При появлении активного сигнала на
дискретном входе преобразователь частоты замедляется до остановки,
но все рабочие параметры сохраняются в памяти. После снятия активного
сигнала ПЧВ продолжит работу в состоянии, предшествующем остановке.
11
Внешняя авария (активна при замыкании)
При наличии активного сигнала на этом входе ПЧВ выполняет действия
при обнаружении аварии, выбранные в параметре FA.13 (разряд 0х000).
На ЛПО отображается код ошибки Err.15 (Неисправность внешнего оборудования).
12
Многоскоростной вход 1
Выбор скорости при источнике задания
частоты “Многоскоростной режим” (в параметре F0.03 задано значение
6).
Комбинации состояний дискретных входов и соответствующие
им параметры, в которых задаются значения скорости при работе в “Многоскоростном
режиме” приведены в таблице.
13
Многоскоростной вход 2
14
Многоскоростной вход 3
15
Многоскоростной вход 4
16
Вход 1 выбора времени разгона/торможения
Позволяет выбрать одно из четырех
значений времени разгона / торможения, в зависимости от комбинации
замкнутых входов (см. таблицу для пояснения)
17
Вход 2 выбора времени разгона/торможения
18
Переключение источника задания частоты
Если в параметре F0.07 (разряд 000х)
задано значение 2 , то по активному сигналу на данном дискретном входе
происходит переключение между каналами X и Y.
Если в параметре F0.07 (разряд 000х)
задано значение 3, то по активному сигналу на данном дискретном входе
происходит переключение между каналом X и комбинацией X & Y.
Если в параметре F0.07 (разряд 000х)
задано значение 4, то по активному сигналу на данном дискретном входе
происходит переключение между каналом Y и комбинацией X & Y.
19
Сброс цифрового задания частоты до параметра F0.08
При цифровом задании частоты позволяет вернуть уставку по скорости,
после ее изменения стрелками / потенциометром.
20
Переключение канала управления
Если в параметре F0.01 задано значение
1, то с помощью сигнала на данном дискретном входе можно выбрать канал
управления: ЛПО или дискретные входы.
Если в параметре F0.01 задано значение
2, то с помощью сигнала на данном дискретном входе можно выбрать канал
управления: ЛПО или RS-485.
21
Приостановка разгона
Пока на данном дискретном входе присутствует
активный сигнал, ПЧВ приостанавливает разгон.
22
Приостановка ПИД-регулирования
При замкнутом дискретном входе ПИД-регулирование не действует, преобразователь
поддерживает текущую частоту на выходе.
23
Сброс профиля скорости
Сброс состояния встроенного ПЛК.
24
Приостановка качания частоты
Пока
на данном дискретном входе присутствует активный сигнал, преобразователь
работает на центральной частоте.
25
Вход счетчика
Дискретный вход выполняет функцию
счетчика импульсов.
26
Сброс счетчика
По активному сигналу данного дискретного
входа осуществляется сброс текущего значения счетчика импульсов.
27
Вход для счета длины
Дискретный вход выполняет функцию
счетчика для подсчета длины намотки.
28
Сброс длины
По активному сигналу данного дискретного
входа осуществляется сброс текущего значения счетчика длины намотки.
29
Контроль крутящего момента запрещен
Состояние сигнала на дискретном входе позволяет выбирать режим работы
векторного управления, задаваемый в параметре F3.09.
30
Измерение частоты на клемме DI6
Позволяет использовать дискретный вход в качестве источника задания
частоты и других параметров.
31
Активация пожарного режима
При замыкании дискретного входа запускает
«Пожарный режим», при котором ПЧВ работает до полного отказа.
32
Немедленное торможение постоянным током
При замыкании дискретного входа запускается немедленный процесс торможения
постоянным током.
ПЧВ немедленно отключает выходное напряжение
с выбегом двигателя. При этом сброса команды пуска не происходит:
при переключении дискретного входа в неактивное состояние ПЧВ снова
осуществляет разгон двигателя.
33
Внешняя авария (активна при размыкании)
При отсутствии активного сигнала на этом входе ПЧВ выполняет действия
при обнаружении аварии, выбранные в параметрах FA.13 и FA.15.
34
Контроль изменения частоты
Выходная
частота изменяется только при наличии активного сигнала на данном
дискретном входе.
35
Переключение характеристики ПИД-регулятора
Производит переключение с положительной обратной связи на отрицательную
и наоборот (инвертирует значение параметра F9.03).
36
Внешняя команда на останов
Когда
в качестве источника подачи сигнала запуска выбрана клавиатура ЛПО
(в параметре F0.01 задано значение
0), дискретный вход эквивалентен кнопке “СТОП/СБРОС” на клавиатуре
ЛПО.
37
Переключение канала управления между DI и RS485
Сигнал на данном дискретном входе осуществляет переключение канала
управления с дискретных входов на RS-485 и обратно, в зависимости
от значения, заданного в параметре F0.01.
Если в
параметре F0.01 задано значение
0 (источник подачи запуска – ЛПО), то сигнал на данном дискретном
входе игнорируется.
Если в параметре F0.01 задано значение
1 (источник подачи запуска – дискретный вход):
данный дискретный вход разомкнут – выбрано управление через
дискретные входы;
данный дискретный вход замкнут – выбрано управление по RS-485.
Если в параметре F0.01 задано значение
2 (источник подачи запуска – RS-485):
данный дискретный вход разомкнут – выбрано управление по RS-485;
данный дискретный вход замкнут – выбрано управление через дискретные
входы.
Пока на данном дискретном входе присутствует активный сигнал, интегральная
составляющая ПИД-регулятора отключается, остаются только пропорциональная
и дифференцирующая.
39
Переключение с источника задания частоты Х на предустановленное значение F0.08
Осуществляется переключение с источника
задания частоты Х на предустановленное значение, заданное в параметре
F0.08.
40
Переключение с источника задания частоты Y на предустановленное значение F0.08
Осуществление переключение с источника
задания частоты Y на предустановленное значение, заданное в параметре F0.08.
43
Переключение коэффициентов ПИД-регулятора
Одним из способов переключения набора коэффициентов ПИД-регулятора
является переключение по дискретному входу (в параметре F9.17 задано значение
1).
При активном сигнале на данном дискретном входе используются
коэффициенты F9.14 – F9.16.
При отсутствии
активного сигнала на данном дискретном входе используются коэффициенты F9.05 – F9.07.
44
Пользовательская авария 1
При наличии
активного сигнала на этом входе ПЧВ выполняет действия при обнаружении
аварии, выбранные в параметре FA.15 (разряд 0000х).
На ЛПО отображается код ошибки Err.27 (Пользовательская авария 1).
45
Пользовательская авария 2
При наличии
активного сигнала на этом входе ПЧВ выполняет действия при обнаружении
аварии, выбранные в параметре FA.15 (разряд 000х0).
На ЛПО отображается код ошибки Err.28 (Пользовательская авария 2).
46
Переключение режимов регулирования скорости / управления моментом
При неактивном дискретном входе режим
управления определяется параметром F3.09. При активном
– значение параметра инвертируется.
47
Экстренный останов
При замыкании данного дискретного
входа запускается максимально быстрый останов двигателя.
ПЧВ
немедленно отключает выходное напряжение с остановом двигателя выбегом.
При этом происходит сброс команды пуска: при переключении дискретного
входа в неактивное состояние ПЧВ не осуществляет снова разгон двигателя.
Для запуска двигателя необходимо снова подать команду на пуск в соответствии
с источником запуска, заданным в параметре F0.01.
ПЧВ не
выполняет команду на пуск до тех пор, пока на данном дискретном выходе
присутствует активный сигнал.
48
Внешняя команда на останов (высокий приоритет)
В любом режиме управления данный дискретный вход может использоваться
для остановки двигателя со временем торможения, заданным в параметре F8.08 (Время торможения
4).
49
Торможение постоянным током
При замыкании
дискретного входа преобразователь частоты переходит к торможению постоянным
током. Время торможения соответствует значению, заданному в параметре F0.19 (Время торможения
1).
Торможение осуществляется только до тех пор, пока на данном
дискретном входе присутствует активный сигнал.
После подачи
активного сигнала на данный дискретный вход преобразователь производит
торможение вращения вала двигателя со снижением частоты вплоть до
0 Гц. При достижении частоты 0 Гц вал двигателя не удерживается постоянным
током, на ЛПО включен индикатор ”РАБОТА”.
При переключении дискретного
входа в неактивное состояние, ПЧВ снова начинает разгон двигателя,
повторной подачи команды пуска не требуется.
50
Сброс текущего времени работы
По активному сигналу на данном дискретном входе осуществляется сброс
текущего значения времени работы преобразователя частоты.
51
Запуск таймера
По активному сигналу на данном дискретном
входе осуществляется запуск таймера срабатывания дискретных (релейных)
выходов (см. параметр F6.38). По окончании
отсчета времени таймера, произойдет срабатывание дискретного (релейного)
выхода с назначенной функцией “Выход таймера” (в соответствующем параметре F6.01 – F6.06 задано значение
43). Выход будет оставаться включенным до тех пор, пока на данном
дискретном входе будет присутствовать активный сигнал. Если во время
отсчета времени таймера сигнал на данном дискретном входе переходит
в неактивное состояние, отсчет времени таймера прекращается, а срабатывания
выхода не происходит.
52
Сброс таймера
По активному сигналу на данном дискретном
входе осуществляется перезапуск таймера срабатывания дискретных (релейных)
выходов (см. параметр F6.38).
При появлении
активного дискретного сигнала во время отсчета времени таймера, заданного
в параметре F6.38, осуществляется
перезапуск таймера и отсчет заданного времени сначала.
При появлении
активного дискретного сигнала после окончания отсчета времени таймера
и срабатывания дискретного (релейного) выхода:
соответствующий дискретный (релейный) выход переводится в выключенное
состояние;
выполняется перезапуск таймера и отсчет заданного времени сначала.
При постоянном присутствии активного сигнала на данном
дискретном входе, отсчет времени таймера не выполняется.
В данном параметре задается время задержки между включением (выключением)
дискретного сигнала и приведением дискретного входа в активное (неактивное)
состояние.
Параметр F5.16
F5.16
Выбор режима управления
Значение
по умолчанию
0
Диапазон значений
0
Двухпроводная схема 1
1
Двухпроводная схема 2
2
Трехпроводная схема 1
3
Трехпроводная схема 2
Данный параметр определяет четыре различных способа управления
работой преобразователя с помощью дискретных входов прибора.
0: Двухпроводная схема 1
Данный режим управления
применяется наиболее часто.
Для управления в данном режиме используются
два дискретных входа с назначенными функциями:
В данном режиме дискретный вход
с назначенной функцией “Пуск в прямом направлении” (значение 1) служит
для разрешения подачи команды пуска.
Для подачи команды пуска
служит дискретный вход с назначенной функцией “Пуск в обратном направлении”
(значение 2). Направление вращения двигателя определяется состоянием
сигнала на данном дискретном входе.
Схема подключения дискретных
входов и логика работы в режиме управления “Двухпроводная схема 2”
приведены на рисунке.
Режим управления
“Двухпроводная схема 2”
2: Трехпроводная схема 1
Для управления
в данном режиме используются три дискретных входа с назначенными функциями:
Дискретный вход с назначенной
функцией “Трехпроводная схема управления” (значение 3) служит для
подачи сигнала команды пуска.
Направление вращения двигателя
(прямое или обратное) определяется состояниями сигналов на соответствующих
дискретных входах с назначенными функциями “Пуск в прямом направлении”
(значение 1) и “Пуск в обратном направлении” (значение 2).
Схема
подключения дискретных входов и логика работы в режиме управления
“Трехпроводная схема 1” приведены на рисунке.
Режим управления
“Трехпроводная схема 1”
3: Трехпроводная схема 2
Для управления
в данном режиме также используются три дискретных входа с назначенными
функциями:
Параметры F5.18 – F5.22 служат для настройки функций аналогового входа
AI1
Параметр F5.18 позволяет ограничить минимальное
напряжение на аналоговом входе. Если значение на аналоговом входе
AI1 ниже, чем значение параметра F5.18, то ПЧВ это значение на аналоговом входе приравнивает к нулю.
Параметр F5.19 задает соотношение значения входного аналогового
сигнала к значению нижнего ограничения AI1, заданного. По умолчанию
минимальное напряжение на аналоговом входе соответствует 0 % от измеряемого
диапазона.
Параметр F5.20 позволяет ограничить максимальное
напряжение на аналоговом входе. Если значение на аналоговом входе
AI1 выше, чем значение параметра F5.20, то ПЧВ это значение на аналоговом входе определяет как максимальное.
Параметр F5.21 задает соотношение значения входного аналогового
сигнала к значению верхнего ограничения AI1. По умолчанию максимальное
напряжение на аналоговом входе соответствует 100% от измеряемого диапазона.
В параметре F5.22 задается значение
постоянной времени фильтра аналогового входа AI1.
Параметры F5.23 – F5.27 служат для настройки функций аналогового входа
AI2
Настройки параметров аналогового входа AI2 аналогичны настройкам
параметров аналогового входа AI1. Аналоговый вход AI2 является универсальным
и может принимать как токовый сигнал, так и сигнал напряжения. Режим
работы аналогового входа AI2 (прием сигнала тока или сигнала напряжения)
определяется положением джампера J2.
Когда аналоговый вход AI2 работает в режиме приема сигнала тока,
в параметрах F5.23 и F5.25 задаются значения напряжения, исходя из пересчета
0,5 В на 1 мА.
Параметры F5.33 – F5.36
F5.33
Задержка ложного включения DI1
Значение
по умолчанию
0.0 с
Диапазон значений
0.0 с – 3600.0 с
В параметрах F5.33 – F5.36 задается время задержки между изменением состояний
сигналов на дискретных входах и ответным действием ПЧВ:
Задержка ложного включения: время между включением активного
сигнала на дискретном входе и ответным действием ПЧВ;
Задержка ложного отключения: время между отключением активного
сигнала на дискретном входе и ответным действием ПЧВ.
В настоящее время только дискретные входы DI1 и DI2 имеют функцию
установки времени задержки включения и отключения.
Параметры F5.37 и F5.38
F5.37
Выбор режима работы дискретных входов DI
Значение
по умолчанию
00000
Диапазон значений
0
Активен при высоком уровне
1
Активен при низком уровне
0000x
Дискретный вход DI1
000х0
Дискретный вход DI2
00х00
Дискретный вход DI3
0х000
Дискретный вход DI4
х0000
Дискретный вход DI5
Значения параметров F5.37 и F5.38 определяют какое состояние дискретного
входа является активным, при котором происходит его срабатывание:
когда в параметрах F5.37 и F5.38 задано значение 0 (“Активен при высоком уровне”),
срабатывание дискретного входа происходит при его замыкании (активное
состояние – вход замкнут);
когда в параметрах F5.37 и F5.38 задано значение 1 (“Активен при низком уровне”),
срабатывание дискретного входа происходит при его размыкании (активное
состояние – вход разомкнут).
Группа F6: Выходные клеммы
Все модификации ПЧВ VFD1 оснащены:
многофункциональным релейным выходом (релейный выход 1: Т1А-Т1В-Т1С);
дискретным выходом с поддержкой работы в импульсном режиме
(дискретный выход FM);
универсальным аналоговым выходом 0...20 мА / 0...10 В (AO1).
Модификации ПЧВ VFD1 мощностью от 11 к Вт и выше оснащены дополнительными
выходами:
релейным выходом (релейный выход 2: Т2А-Т2С);
аналоговым выходом 0-10 В (AO2).
Параметр F6.00
F6.00
Режим работы дискретного выхода FM
Значение
по умолчанию
1
Диапазон значений
0
Импульсный выход FMP
1
Выход с открытым коллектором (FMR)
Дискретный выход FM может работать в двух режимах:
FMP – импульсный выход с максимальной частотой 100 кГц. Значение
выходной частоты изменяется пропорционально значению параметра, настраиваемого
в F6.11;
FMR – дискретный выход с открытым коллектором. Функция срабатывания
дискретного выхода настраивается в параметре F6.01.
Параметры F6.01 – F6.03, F606
F6.01
Дискретный выход FM
Значение
по умолчанию
0
F6.02
Релейный выход 1 (Т1А-Т1В-Т1С)
Значение по умолчанию
2
F6.03
Релейный выход 2 (Т2А-Т2С)
Значение по умолчанию
1
F6.06
Виртуальный дискретный выход
VDO
Значение по умолчанию
0
Параметры F6.01 – F6.03, F6.06 используются для
назначения функций дискретным и релейным выходам прибора.
Значения параметров F6.01 – F6.03, F6.06 и соответствующие
им функции приведены в таблице.
Функции дискретных и релейных выходов
Значение
Функция
Описание
0
Нет действий
Выход отключен.
1
ПЧВ в работе
Выход будет замкнут пока ПЧВ находится
в работе, даже если выходная частота равна нулю.
Выход замыкается после достижения
пользовательской частоты из параметра F8.19.
4
Заданная частота достигнута
Выход будет замкнут, пока выходная
частота находится в диапазоне обнаруживаемой частоты (F8.21).
5
Работа на нулевой скорости 1 (выход
не срабатывает при принудительном останове)
Выход замыкается, когда во время работы
выходная частота равна 0 Гц. Не срабатывает при переходе через 0 Гц
во время реверса.
6
Предупреждение о перегрузке электродвигателя
Перед срабатыванием электронной тепловой
защиты двигателя она оценивается в соответствии с прогнозируемым значением
перегрузки, и сигнал включения выдается после превышения прогнозируемого
значения. Защита от перегрузки настраивается в параметрах FA.00 – FA.02.
7
Предупреждение о перегрузке ПЧВ
Выход замыкается за 10 секунд до обнаружения
перегрузки преобразователя частоты.
8
Счетчик достиг установленного значения
Выход замыкается, когда значение счетчика
достигло значения, заданного в параметре FB.08.
9
Счетчик достиг максимального значения
Выход замыкается, когда счетчик достиг
значения FB.09.
10
Достигнута заданная длина
Выход замыкается, когда подсчитанная
длина намотки достигла значения, заданного в параметре FB.05.
11
Цикл ПЛК завершен
Когда завершен цикл встроенного ПЛК
(в параметре F0.03 задано значение
7), выход замыкается на 250 мс.
Выход замыкается при достижении суммарного
времени работы, заданного в параметре F8.17.
13
Заданная частота находится за пределами
Выход замыкается, когда заданная частота
превышает верхний и нижний пределы частоты, а выходная частота инвертора
достигает верхнего и нижнего пределов частоты.
14
Крутящий момент находится за пределами
При активации функции ограничения
крутящего момента автоматически включается функция защиты от срыва,
автоматически изменяется выходная частота и замыкается выход, указывающий
на ограничение крутящего момента на силовом выходе. Этот выходной
сигнал может быть использован для снижения нагрузки или отображения
сигнала о состоянии перегрузки на контрольном устройстве.
15
Готовность ПЧВ
Релейный выход замкнут, когда ПЧВ
готов к работе.
16
Сигнал на AI1 больше чем на AI2
Выход замкнут, когда величина сигнала
на аналоговом входе AI1 больше чем величина сигнала на аналоговом
входе AI2.
17
Верхнее ограничение частоты
Выход замыкается, когда рабочая частота
достигает верхнего предела.
18
Нижнее ограничение частоты
Выход замыкается, когда рабочая частота
достигает нижнего предела.
19
Низкое напряжение
Выход замыкается при пониженном входном
напряжении.
20
Управляется по шине
Управление состоянием дискретного
выхода осуществляется по сети RS-485.
21
Счетчик перезапусков при пожаре
При активации «Пожарного режима» считает
сколько раз перезапустился ПЧВ при возникновении неисправности
23
Работа на нулевой скорости 2 (выход
замкнут даже при останове)
Выход замыкается, когда выходная частота
ПЧВ равна нулю, в том числе, когда двигатель остановлен.
24
Достигнуто суммарное время нахождения
во включенном состоянии (F7.13 = F8.16)
Выход замыкается, когда суммарное
время нахождения во включенном состоянии, отображаемое в параметре F7.13, достигло уставки,
заданной в параметре F8.16.
Выход замыкается при обнаружении соответствующего
значения тока нагрузки, заданного в параметре F8.40.
30
Время таймера истекло
Данная функция работает, когда в параметре F8.42 задано значение
1 (включен режим ПЧВ для работы по таймеру с импульсным выходом).
Когда время работы ПЧВ достигнет значения уставки данного таймера,
ПЧВ остановится, а дискретный выход перейдет в импульсный режим.
31
Превышен предел входного сигнала AI1
Когда измеренное значение сигнала
на аналоговом входе AI1 превышает значение, заданное в параметре F8.46 или ниже значения,
заданного в параметре F8.45, замыкается дискретный
выход FM.
32
Работа без нагрузки
Выход замыкается, когда преобразователь
частоты определяет, что двигатель работает без нагрузки.
33
Реверс
Выход замыкается, когда двигатель
вращается в обратном направлении.
Выход замыкается при обнаружении значения
нулевого тока, заданного в параметре F8.34 с учетом времени
задержки обнаружения, заданном в параметре F8.35.
Выход замыкается, когда измеренное
значение температуры IGBT-модуля, отображаемое в параметре F7.07 достигло значение
уставки, заданной в параметре F8.47.
36
Достигнут программный ток перегрузки
(F8.36, F8.37)
Выход замыкается при превышении значения
тока перегрузки, заданного в параметре F8.36 с учетом времени
задержки, заданном в параметре F8.37.
37
Достигнут нижний предел частоты (выход
замкнут даже при останове)
Выход замыкается, когда выходная рабочая
частота достигает нижнего предела частоты (в том числе, если двигатель
остановлен).
38
Авария
Выход замыкается при обнаружении аварии.
40
Достигнуто суммарное время работы
Выход срабатывает при достижении суммарного
времени работы.
41
Компаратор 1
Срабатывание выхода определяется условиями,
задаваемыми пользователем в параметрах F6.28 – F6.32.
42
Компаратор 2
Срабатывание выхода определяется условиями,
задаваемыми пользователем в параметрах F6.33 – F6.37.
43
Выход таймера
Срабатывание выхода происходит по
окончании обратного отсчета времени таймера, заданного в параметре F6.38.
Запуск обратного
отсчета времени таймера (F6.38) осуществляется по активному сигналу
на дискретном входе с назначенной функцией ”Запуск таймера” (в соответствующем
параметре F5.00 – F5.05, F5.10 задано значение
51).
Параметры F6.11 – F6.13
F6.11
Выбор параметра, задаваемого импульсным выходом FMP
Значение
по умолчанию
0
F6.12
Выбор параметра, задаваемого выходным сигналом AO1
Значение по умолчанию
0
F6.13
Выбор параметра, задаваемого
выходным сигналом AO2
Значение по умолчанию
1
Аналоговые выходы AO1, AO2 и импульсный выход FMP осуществляют
вывод измеренных параметров ПЧВ в форме унифицированных аналоговых
сигналов 0 – 20 мА / 0 – 10 В и импульсного сигнала 0 – 100 кГц соответственно.
Назначение измеренных параметров ПЧВ для аналоговых выходов AO1,
AO2 и импульсного выхода FMP осуществляется с помощью значений, задаваемых
в параметрах F6.11 – F6.13 (см. таблицу).
Функции аналоговых и импульсного выходов и соответствующие
им значения параметров F6.11 – F6.13
Значение
Функция
Диапазон
0
Выходная частота
0 Гц – максимальная выходная частота
1
Заданная частота
0 Гц – максимальная выходная частота
2
Выходной ток
0 % – двукратное значение номинального тока двигателя
3
Выходной крутящий момент
0 % – двукратное значение номинального крутящего момента двигателя
4
Выходная мощность
0 % – двукратное значение номинальной мощности двигателя
5
Выходное напряжение
0 % – двукратное значение номинального
напряжения ПЧВ
6
Импульсный вход
0.01 кГц – 100.00 кГц
7
Входное значение AI1
0 В – 10 В
8
Входное значение AI2
0 В – 10 В / 0 мА– 20 мА
10
Длина
0 м – максимальная заданная длина
намотки
11
Значение счетчика
0 м – максимальное значение счетчика
12
Задание по RS-485
-10000 – 10000
Примечание
Когда выбрана данная
функция, выход транслирует частоту, заданную по сети RS-485. Диапазон
значений от -10000 до 10000 соответствует диапазону от -100.00 до
100.00 % максимальной выходной частоты. Отрицательные значения соответствуют
реверсу двигателя.
13
Скорость вращения электродвигателя
0 об/мин – скорость вращения, соответствующая максимальной выходной
частоте
14
Выходной ток
0 А – 1000 А (соответствует диапазону
выходного сигнала 0 В– 10 В
15
Выходное напряжение
0.0 В – 1000.0
В
Параметр F6.14
F6.14
Максимальная выходная частота импульсов
FMP
Значение
по умолчанию
50.00 Гц
Диапазон значений
0.01 кГц – 100.00 кГц
Данный параметр позволяет ограничить максимальную выходную частоту
на импульсном дискретном выходе FMP.
Параметры F6.15 – F6.18
F6.15
Смещение выходного сигнала AO1
Значение
по умолчанию
0.0 %
Диапазон значений
100.0 % – 100.0 %
Значение аналогового выхода можно представить в виде линейной функции:
,
где
x – предварительное значение аналогового выхода;
k – коэффициент усиления выходного сигнала, задаваемый в
параметрах F6.16 или F6.18;
b – смещение выходного сигнала, задаваемое в параметрах F6.15 или F6.17.
Примечание
Значение смещение выходного сигнала равное 100 % соответствует
значению тока 10 В (для аналогового выхода 0 –10 В) и 20 мА (для аналогового
выхода 0 – 20 мА).
С помощью параметров F6.15 – F6.18 можно откорректировать значение соответствующего
аналогового выхода, либо настроить его на любую желаемую выходную
кривую.
Параметры F6.19 – F6.26
F6.19
Время задержки включения дискретного
выхода FM
Значение
по умолчанию
0.0 с
Диапазон значений
0.0 с – 3600.0 с
В параметрах F6.19 – F6.26 задается время задержки срабатывания дискретного
выхода FMR, релейных выходов 1 и 2 и виртуального релейного выхода
VDO (время между срабатыванием выхода и фактическим изменением его
состояния).
Параметр F6.27
F6.27
Выбор полярности выходного сигнала
Значение
по умолчанию
00000
Диапазон значений
0
Положительная полярность
1
Отрицательная полярность
0000x
Дискретный выход FMR
000х0
Релейный выход 1
00х00
Релейный выход 2
0х000
Резерв
х0000
Резерв
Параметр F6.27 служит для выбора полярности дискретного
и релейного выходов:
Положительная полярность:
дискретный выход FMR: нормально открытый контакт FM-COM;
релейный выход 1: нормально открытый контакт T1A-T1C, нормально-закрытый
контакт T1A-T1B;
релейный выход 2: нормально открытый контакт T2A-T2C;
Отрицательная полярность:
дискретный выход FMR: нормально закрытый контакт FM-COM;
релейный выход 1: нормально закрытый контакт T1A-T1C, нормально-открытый
контакт T1A-T1B;
релейный выход 2: нормально закрытый контакт T2A-T2C;
Примечание
Независимо от значения, заданного в параметре F6.27, при отсутствии питающего напряжения прибора,
дискретные и релейные выходы переводятся в неактивные состояния, соответствующие
положительной полярности.
Параметр F6.28
F6.28
Настройка контролируемого параметра
компаратора 1
Значение
по умолчанию
00
Диапазон значений
0: Выходная частота
1: Заданная
частота
2: Напряжение на шине постоянного тока
3: Выходное
напряжение
4: Выходной ток
5: Выходная мощность
6: Выходной крутящий момент
7-8: Резерв
9: Значение аналогового
входа AI1
10: Значение аналогового входа AI2
11: Резерв
12: Значение счетчика
13: Длина
В параметре F6.28 выбирается контролируемый
параметр (ЕХ) для первого компаратора, который будет сравниваться
с уставками, заданными пользователем в параметрах F6.31 и F6.32.
Параметр F6.29
F6.29
Метод сравнения компаратора 1
Значение
по умолчанию
00
Диапазон значений
0000х – Метод сравнения:
0:
Равенство (EX == X1) ;
1: Больше или равно 1);
2: Меньше или равно 2);
3: Значение в диапазоне
(X1 ≤ EX ≤ X2);
4: Побитное сравнение (EX & X1 = X2).
000х0 – Метод определения:
0: Ложное значение;
1:
Истинное значение.
Примечание
1) EX ≥ X1.
2) EX ≤ X1.
Значение, задаваемое в разряде 0000х параметра F6.29, определяет метод сравнения – каким образом контролируемый параметр
(EX), выбранный в параметре F6.28, будет сравниваться
с уставками X1 и X2, заданными в параметрах F6.31 и F6.32 соответственно.
Значение, задаваемое в разряде 000х0 параметра F6.29 определяет логику работы релейного выхода:
0: Ложное значение – выход сработает, если условие не выполнено;
1: Истинное значение – выход сработает, если условие выполнено.
Параметр F6.30
F6.30
Пользовательская зона нечувствительности
выхода 1
Значение
по умолчанию
0
Диапазон значений
0 – 65535
Значение параметра F6.30 определяет зону
нечувствительности срабатывания компаратора, если в разряде 0000х
параметра F6.29 задано значение 1 (выбран метод
сравнения “Больше или равно”) или значение 2 (выбран метод сравнения
“Меньше или равно”).
Например, когда в параметре F6.29 задано значение 11, тогда при увеличении значения контролируемого
параметра F6.28 от нуля до уставки, заданной в
параметре F6.31:
выход компаратора сработает только при достижении контролируемым
параметром значения “F6.31 + F6.30”;
выход отключится, когда значение контролируемого параметра
станет ниже значения “F6.31 – F6.30”.
Параметры F6.31 и F6.32
F6.31
Пользовательская уставка 1 компаратора
1
Значение
по умолчанию
0
Диапазон значений
0 – 65535
В параметрах F6.31 и F6.32 задаются соответственно значения уставки 1 (X1)
и уставки 2 (X2) компаратора 1.
Значения данных параметров записываются без десятичной точки, например,
частота 50,00 Гц записывается как “5000”.
Пример
Требуется выполнить настройку компаратора для срабатывания
релейного выхода 1 при достижении значения выходной частоты 20 Гц.
Последовательность настройки:
Задать в параметре F6.02 значение 41 (условия срабатывания
релейного выхода 1 (Т1А-Т1В-Т1С) определяются пользователем);
Задать в параметре F6.28 значение 0 (в
качестве контролируемого параметра выбрана выходная частота);
Задать в параметре F6.29 значение 11 (условие
срабатывания – значение контролируемого параметра больше или равно
значению уставки, срабатывание происходит при выполнении условия);
Задать в параметре F6.30 значение 0 (зона
нечувствительности срабатывания компаратора равна нулю);
Задать в параметре F6.31 значение 2000
(значение уставки выходной частоты равно 20,00 Гц).
При данных значениях параметров релейный выход 1 сработает при
достижении параметра выходной частоты значения 20,00 Гц.
Параметры F6.33 – F6.37
F6.33
Настройка контролируемого параметра
компаратора 2
Значение
по умолчанию
00
Диапазон значений
0: Выходная частота
1: Заданная частота
2: Напряжение
на шине постоянного тока
3: Выходное напряжение
4: Выходной
ток
5: Выходная мощность
6: Выходной крутящий момент
7-8: Резерв
9: Значение аналогового входа AI1
10:
Значение аналогового входа AI2
11: Резерв
12: Значение
счетчика
13: Длина
Параметры настройки второго компаратора F6.33 – F6.37 аналогичны параметрам настройки
первого компаратора F6.28 – F6.32.
Параметр F6.38
F6.38
Установка времени таймера
Значение
по умолчанию
0
Диапазон значений
0.00 с – 100.00 с
В данном параметре задается время обратного отсчета таймера срабатывания
дискретных (релейных) выходов).
По окончании обратного отсчета времени, заданного в данном параметре,
происходит срабатывание дискретного (релейного) выхода с назначенной
функцией ”Выход таймера” (в соответствующем параметре F6.01 – F6.06 задано значение
43).
Группа F7: Параметры оператора
Параметр F7.00
F7.00
Копирование параметров панели управления
Значение
по умолчанию
0
Диапазон значений
0
Нет действий
1
Загрузить параметры в панель управления
2
Скачать параметры в преобразователь частоты
С помощью данного параметра можно записать настройки ПЧВ в панель
управления и затем растиражировать записанные настройки на остальные
преобразователи частоты.
Параметр F7.01
F7.01
Копирование параметров панели управления
Значение
по умолчанию
0
Диапазон значений
0
Отключен
1
Переключение с дистанционного управления
(по DI либо RS-485) на управление с клавиатуры
2
Кнопка вращения в обратном направлении
3
Кнопка вращения с фиксированной скоростью
в прямом направлении
4
Кнопка вращения с фиксированной скоростью
в обратном направлении
5
Переключение режимов меню
Параметр F7.01 служит для выбора функций, выполняемых
по нажатию многофункциональной кнопки , расположенной
на ЛПО прибора.
0: Отключен
Нажатия на кнопку не приведут
ни к каким действиям.
1: Переключение с дистанционного управления (по DI
либо RS-485) на управление с клавиатуры
После нажатия на
кнопку осуществляется переход к местному управлению со встроенной
ЛПО. После повторного нажатия возвращается дистанционное управление.
Если изначально было выбрано местное управление с помощью ЛПО (в параметре F0.01 задано значение
0), то данная функция не выполняется.
2: Кнопка вращения в обратном направлении
Нажатие на кнопку изменяет направления вращения вала двигателя.
Данная функция выполняется, только когда выбрано местное управление
с помощью ЛПО (в параметре F0.01 задано значение
0).
3: Кнопка вращения с фиксированной скоростью в прямом
направлении
Вал двигателя вращается в прямом направлении
с фиксированной скоростью пока нажата кнопка . Значение
фиксированной скорости задается в параметре F8.00.
4: Кнопка вращения с фиксированной скоростью в обратном
направлении
Вал двигателя вращается в обратном направлении
с фиксированной скоростью пока нажата кнопка . Значение
фиксированной скорости задается в параметре F8.00.
5: Переключение режимов меню
Существует
два режима меню, выбор осуществляется нажатием кнопки :
«-base». Классическое меню с отображением
всех возможных параметров для редактирования;
«--C--». Меню, отображающее все параметры,
заводские значения которых были изменены (откорректированы) пользователем.
Выбор режима подтверждается нажатием кнопки .
Параметр F7.02
F7.02
Функционал кнопки “СТОП/СБРОС”
Значение
по умолчанию
1
Диапазон значений
0
Кнопка “СТОП/СБРОС” работает только
при управлении с клавиатуры (когда F0.01 = 0).
Отображение параметров в первой строке ЛПО во время работы
Значение
по умолчанию
17
Диапазон значений
0000 – FFFF
Бит 00: Выходная частота (Гц);
Бит 01: Заданная частота (Гц);
Бит 02: Напряжение на шине
DC (В);
Бит 03: Выходное напряжение (В);
Бит 04: Выходной
ток (A);
Бит 05: Выходная мощность (кВт);
Бит 06: Выходной
крутящий момент (%);
Бит 07: Статус дискретных входов DI;
Бит 08: Статус дискретных выходов DO;
Бит 09: Измеренное
значение AI1 (В);
Бит 10: Измеренное значение AI2 (В);
Бит 11: Резерв;
Бит 12: Значение счетчика;
Бит 13: Длина;
Бит 14: Скорость вращения;
Бит 15: Уставка ПИД.
F7.04
Отображение параметров во второй строке ЛПО во время работы
Значение по умолчанию
0
Диапазон значений
0000 – FFFF
Бит 00: Обратная
связь ПИД;
Бит 01: Статус ПЛК;
Бит 02: Обратная связь
по скорости (0.1 Гц);
Бит 03: Резерв;
Бит 04: Оставшееся
время работы;
Бит 05: Измеренное значение AI1 до коррекции;
Бит 06: Измеренное значение AI2 до коррекции;
Бит 07: Резерв;
Бит 08: Линейная скорость;
Бит 09: Текущее время от момента
включения;
Бит 10: Текущее время работы;
Бит 11: Резерв;
Бит 12: Параметры связи;
Бит 13: Резерв;
Бит 14: Основная
частота X;
Бит 15: Вспомогательная частота Y.
Параметры F7.03 и F7.04 отвечают за отображение контролируемых параметров
во время работы ПЧВ. Выбор отображаемых параметров осуществляется
по битам, запись значения параметра осуществляется в шестнадцатеричной
(hex) системе.
Пример
Во время работы ПЧВ необходимо следить за следующими параметрами:
Бит 00: Выходная частота (Гц);
Бит 01: Заданная частота (Гц);
Бит 03: Выходное напряжение (В);
Бит 04: Выходной ток (A).
Последовательность записи значения в параметр F7.03:
Определяем значение параметра F7.03 в виде двоичного числа. Подставляя единицы в соответствующие биты,
Бит
15
14
13
12
11
10
09
08
07
06
05
04
03
02
01
00
Число
0
0
0
0
0
0
0
0
0
0
0
1
1
0
1
1
получаем число 0000 0000 00011011.
Переводим данное двоичное число в шестнадцатеричную систему
(hex), получаем число 1B.
Записываем значение 1B в параметр F7.03, после чего запись значения в параметр можно считать завершенной.
Запись значения в параметр F7.04 осуществляется аналогично записи в параметр F7.03 в соответствии с примером, приведенным выше.
Перемещение между параметрами, выбранными для отображения, осуществляется
при помощи кнопки (расположена в левом нижнем углу ЛПО).
Параметры F7.05 и F7.05
F7.05
Отображение параметров в режиме “Стоп” (на ПЧВ подано питание, нет
команды на пуск)
Значение
по умолчанию
33
Диапазон значений
0000 – FFFF
Бит 00: Заданная частота (Гц);
Бит 01: Напряжение на шине DC (В);
Бит 02: Статус дискретных
входов DI;
Бит 03: Статус дискретных выходов DO;
Бит 04:
Измеренное значение AI1 (В);
Бит 05: Измеренное значение AI2
(В);
Бит 06: Резерв;
Бит 07: Значение счетчика;
Бит 08: Значение длины;
Бит 09: Статус ПЛК;
Бит 10: Скорость
вращения;
Бит 11: Настройки ПИД;
Бит 12: Резерв;
Бит 13: Значение обратной связи ПИД.
F7.06
Множитель скорости вращения
Значение по умолчанию
1.0000
Диапазон значений
0.0001 – 6.5000
Параметр F7.05 отвечает за отображение контролируемых
параметров во время останова ПЧВ. Запись значений в параметр осуществляется
аналогично записи значений в параметры F7.03 и F7.04.
Параметр F7.06 позволяет установить соответствие
между выходной частотой ПЧВ и скоростью нагрузки. Параметр может использоваться
для корректировки фактической скорости, если, например, применяется
редуктор.
Параметр F7.07
F7.07
Температура IGBT-модуля
Значение
по умолчанию
—
Диапазон значений
0.0 °С – 100.0 °С
Данный параметр отображает текущую температуру IGBT-модуля в градусах
Цельсия. Параметр доступен только для чтения.
Параметр F7.08
F7.08
Температура радиатора выпрямительного
моста
Значение
по умолчанию
—
Диапазон значений
0.0 °С – 100.0 °С
Отображает температуру радиатора выпрямительного моста в градусах
Цельсия. Параметр доступен только для чтения.
Параметр F7.09
F7.09
Суммарное время работы
Значение
по умолчанию
0 ч
Диапазон значений
0 ч – 65535 ч
Параметр отображает текущее суммарное время работы ПЧВ. Когда данное
время достигнет значения уставки таймера, заданного в параметре F8.17, сработает многофункциональный
дискретный выход ПЧВ, если в соответствующем параметре (параметрах) F6.01 – F6.03, F6.06 задано значение
12.
Параметры F7.10 – F7.12
F7.10
Заводской номер
Значение
по умолчанию
—
Диапазон значений
В зависимости от модификации ПЧВ
Значение параметра F7.12 определяет положение
десятичной точки для отображаемого значения скорости вращения нагрузки.
Пример
Номинальная скорость вращения равна 1500 об/мин.
Данное значение номинальной скорости вращения отображается:
Суммарное время нахождения во включенном
состоянии
Значение
по умолчанию
0 ч
Диапазон значений
0 ч – 65535 ч
Параметр отображает текущее суммарное время нахождения преобразователя
частоты во включенном состоянии. Когда данное время достигнет значения
уставки таймера, заданного в параметре F8.16, сработает многофункциональный
дискретный выход ПЧВ, если в соответствующем параметре (параметрах) F6.01 – F6.03, F6.06 задано значение
24.
Параметр F7.14
F7.14
Суммарное потребление электроэнергии
Значение
по умолчанию
0 кВт
Диапазон значений
0 кВт – 65535 кВт
Параметр отображает текущее значение суммарной потребляемой мощности
преобразователя в кВт.
Параметр F7.15
F7.15
Версия программного обеспечения
Значение
по умолчанию
—
Диапазон значений
В зависимости от модификации ПЧВ
Параметр отображает версию программного обеспечения. Параметр доступен
только для чтения.
В параметрах F8.00, F8.01 и F8.02 задаются соответственно значения
частоты, времени разгона и торможения в режиме работы на фиксированной
скорости (толчковый режим). При этом ПЧВ осуществляет разгон и торможение
двигателя в соответствии с режимом пуска, выбранным в параметре F1.00 и режимом останова,
выбранным в параметре F1.10. В качестве опорного
значения для рампы разгона и торможения используется значение максимальной
выходной частоты, заданной в параметре F0.10.
Параметры F8.03 – F8.08
F8.03
Время разгона 2
Значение
по умолчанию
В зависимости
от модификации ПЧВ
Диапазон
значений
0.0 с – 6500.0 с
ПЧВ позволяет работать с четырьмя предустановленными временами
разгона и торможения. В качестве основного (первого) времени разгона
и торможения, как правило, используются значения, заданные в параметрах F0.18 и F0.19. Остальные три
предустановленных значения задаются в параметрах F8.03 – F8.08.
Требуемое предустановленное время разгона и торможения можно выбирать
в процессе работы ПЧВ с помощью соответствующих функций дискретных
входов (см. параметры F5.00 – F5.05).
Предустановленные значения времени разгона и торможения также используются,
когда выбран режим работы встроенного ПЛК (в параметре F0.03 задано
значение 7, см. группу параметров FD в разделе).
Для исключения возникновения резонансных явлений при работе двигателя,
ПЧВ оснащен отключаемой функцией пропускания частоты.
ПЧВ позволяет устанавливать два значения пропускаемых частот и
одно значение частотного диапазона относительно каждой установленной
пропускаемой частоты. Если заданная частота находится в границах диапазона
частоты F8.09 ± F8.11 или F8.10 ± F8.11, то преобразователь будет работать на граничной частоте. Иллюстрация
работы функции пропускания частоты приведена на рисунке.
Пропуск резонансных
частот
Для отключения функции пропускания частоты в параметрах F8.09 и F8.10 необходимо задать
значение 0.00 Гц.
Параметры F8.09 – F8.11
F8.12
Выдержка на нулевой частоте при переходе
в реверс
Значение
по умолчанию
0.00 с
Диапазон значений
0.00 с – 3000.0 с
В параметре F8.12 задается время
выдержки на нулевой частоте при изменении направления вращения и переходе
через “0 Гц”, как показано на рисунке:
Выдержка на нулевой частоте
при смене направления вращения двигателя
Параметр F8.13
F8.13
Контроль реверса
Значение по умолчанию
0
Диапазон значений
0
Включен
1
Выключен
По умолчанию реверс разрешен во всех режимах управления. При необходимости
можно принудительно запретить работу двигателя в обратном направлении,
задав в параметре F8.13 значение 1.
Параметр F8.14
F8.14
Зависимость несущей частоты ШИМ от температуры
Значение по умолчанию
0
Диапазон значений
0
Нет
1
Да
Преобразователь частоты может автоматически регулировать несущую
частоту в зависимости от собственной температуры. Включение этой функции
позволяет снизить вероятность срабатывания аварии о перегреве ПЧВ.
Параметр F8.15
F8.15
Контроль падения нагрузки
Значение
по умолчанию
0.00 Гц
Диапазон значений
0.00 Гц – 10.00 Гц
Когда несколько преобразователей частоты приводят в действие одну
и ту же нагрузку, распределение нагрузки становится несбалансированным
из-за разной скорости вращения двигателей, что повышает нагрузку на
ПЧВ с более высокой скоростью. Контроль падения нагрузки обеспечивает
снижение скорости по мере увеличения нагрузки, что позволяет ее сбалансировать.
Этот параметр регулирует изменение частоты преобразователя с падающей
скоростью.
Параметр F8.16
F8.16
Уставка таймера нахождения во включенном
состоянии (F7.13)
Значение
по умолчанию
0 ч
Диапазон значений
0 ч – 65000 ч
Когда время, заданное в параметре F7.13 достигнет уставки
таймера F8.16, сработает многофункциональный
дискретный выход ПЧВ, если в соответствующем параметре (параметрах) F6.01 – F6.03, F6.06 задано значение
24.
Когда время, заданное в параметре F7.09 достигнет уставки
таймера F8.17, сработает многофункциональный дискретный выход
ПЧВ, если в соответствующем параметре (параметрах) F6.01 – F6.03, F6.06 задано значение
12.
Параметр F8.18
F8.18
Защита
от перезапуска
Значение по умолчанию
0
Диапазон значений
0
Выключена
1
Включена
Функция защиты от перезапуска предотвращает запуск двигателя в
следующих двух случаях:
При подаче питания на ПЧВ уже присутствует команда на пуск
двигателя (например, нажата кнопка пуска на дискретном входе, или
подана команда от мастера сети по RS-485). В этом случае, для пуска
двигателя необходимо снять существующую команду на пуск и подать ее
заново.
При сбросе аварии сохраняется команда на пуск двигателя (например,
нажата кнопка пуска на дискретном входе, или подана команда от мастера
сети по RS-485). Для пуска двигателя необходимо снять существующую
команду на пуск и подать ее заново.
Значение обнаруживаемой частоты FDT1 (параметр F8.19) и ее гистерезис (параметр F8.20) используются для работы с дискретным выходом с назначенной функцией
“Уровень выходной частоты FDT1 (F8.19)” (в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
3).
Диаграмма, поясняющая работу с параметрами F8.19 и F8.20, представлена на рисунке.
Диаграмма работы функции FDT
Параметр F8.21
F8.21
Диапазон обнаруживаемой частоты
Значение
по умолчанию
0.0 %
Диапазон значений
0.0 % – 100.0 %
Примечание
Значение параметра задается в процентах от значения
максимальной выходной частоты, заданного в параметре F0.10
Значение диапазона обнаруживаемой частоты F8.21 используется для работы с дискретным выходом с назначенной функцией
“Заданная частота достигнута” (в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
4).
Дискретный выход замкнут, пока выходная частота выше либо равна
значению уставки, заданной в параметре F8.21.
Параметр F8.22
F8.22
Пропуск частоты во время разгона/торможения
Значение по умолчанию
0
Диапазон значений
0
Выключен
1
Включен
Параметр F8.22 служит для выбора функции пропуска
частоты во время разгона/торможения.
Когда данная функция включена, для предотвращения появления механического
резонанса, преобразователь частоты будет пропускать резонансные частоты,
заданные в параметрах F8.09 и F8.10, не только во время работы на установившейся
частоте, но и во время разгона и торможения.
Параметр F8.23
F8.23
Выбор действия при достижении суммарного времени работы
Значение по умолчанию
0
Диапазон значений
0
Продолжить работу
1
Выдать предупреждение об ошибке
Значение параметра F8.23 определяет, какие
действия будут выполнены при достижении суммарного времени работы
прибора (см. параметр F7.09):
0: Продолжить работу
При достижении суммарного
времени работы ПЧВ продолжит работу.
1: Выдать предупреждение об ошибке
При достижении
суммарного времени работы ПЧВ выдаст ошибку “Время работы достигло
установленного значения (Err26)” и выполнит останов выбегом.
Для сброса данной ошибки необходимо в параметре F0.20 задать значение
2 (удаление записей о неисправности).
Параметр F8.24
F8.24
Выбор действия при достижении суммарного
времени нахождения с включенным питанием
Значение
по умолчанию
0
Диапазон значений
0
Продолжить работу
1
Выдать предупреждение об ошибке
Значение параметра F8.24 определяет, какие
действия будут выполнены при достижении суммарного времени нахождения
с включенным питанием (см. параметр F7.13):
0: Продолжить работу
При достижении суммарного
времени нахождения с включенным питанием ПЧВ продолжит работу.
1: Выдать предупреждение об ошибке
При достижении
суммарного времени нахождения с включенным питанием ПЧВ выдаст ошибку
“Время нахождения во включенном состоянии достигло установленного
значения (Err29)” и выполнит действия в соответствии со значением,
заданным в параметре FA15 (разряд 00х00).
Для сброса данной ошибки необходимо в параметре F8.24 задать значение 0.
Переключение времени разгона и торможения при достижении значений
частоты, заданных в параметрах F8.25 и F8.26 показано на рисунке.
Переключение
времени разгона и торможения при достижении определенной частоты
Переключение времени разгона
Если выходная
частота ПЧВ ниже значения, заданного в параметре F8.25, то двигатель будет разгоняться с в соответствии с временем, заданным
в параметре F8.03 (Время разгона 2). При превышении
этой частоты произойдет переключение на время, заданное в параметре F0.18 (Время разгона
1).
Переключение времени торможения
Если выходная
частота ПЧВ ниже значения, заданного в параметре F8.26, то двигатель будет замедляться в соответствии с временем, заданным
в параметре F8.04 (Время торможения 2) . До этого
момента торможение двигателя будет выполняться в соответствии с временем,
заданным в параметре F0.19 (Времени торможения
1).
Параметр F8.27
F8.27
Приоритет команды на работу на фиксированной
скорости
Значение
по умолчанию
1
Диапазон значений
0
Выключено
1
Включено
Если установлен приоритет команды на работу на фиксированной скорости,
то при наличии активного сигнала на соответствующем дискретном входе,
ПЧВ переходит в режим работы на фиксированной скорости вне зависимости
от того, в каком режиме работал ПЧВ.
Значение обнаруживаемой частоты FDT2 (параметр F8.28) и ее гистерезис (параметр F8.29) используются для работы с дискретным выходом с назначенной функцией
“Уровень выходной частоты FDT2 (F8.28)” (в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
25).
Работа с параметрами F8.28 и F8.29 аналогична работе с параметрами F8.19 и F8.20.
Данные параметры используются для совместной работы с дискретными
выходами преобразователя частоты (см. параметры F6.01 – F6.03, F6.06). Если для какого-либо
из этих дискретных выходов была назначена функция “Уровень выходной
частоты 1 (F8.30)” (задано значение 26) или функция “Уровень выходной
частоты 2 (F8.32)” (задано значение 27), то при достижении заданных
значений частот соответствующий дискретный выход будет замкнут, пока
выходная частота находится в пределах F8.30 ± F8.31 или F8.32 ± F8.33.
Параметры F8.34 и F8.35
F8.34
Уровень обнаружения нулевого тока на
выходе ПЧВ
Значение
по умолчанию
5.0 %
Диапазон значений
0.0 % – 300.0 %
Примечание
Значение параметра задается в процентах от номинального
тока электродвигателя (см. параметр F2.03).
Когда значение выходного тока преобразователя частоты меньше или
равно уровню обнаружения нулевого тока, заданному в параметре F8.34, а его длительность превышает время задержки
обнаружения нулевого тока, заданное в параметре F8.35, тогда срабатывает дискретный выход с назначенной функцией “Обнаружен
нулевой ток (F8.34, F8.35)” (в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
34).
Параметры F8.36 и F8.37
F8.36
Задание программного значения перегрузки
по току
Значение
по умолчанию
200.0 %
Диапазон значений
0.0 % (не отслеживается)
0.1 % – 300.0 %
Примечание
Значение параметра задается в процентах от номинального
тока электродвигателя (см. параметр F2.03).
Когда значение выходного тока преобразователя частоты больше или
равно значению тока, заданному в параметре F8.36, а его длительность превышает время задержки, заданное в параметре F8.37, тогда срабатывает дискретный выход с назначенной
функцией “Достигнут программный ток перегрузки (F8.36, F8.37)” (в
соответствующем параметре F6.01 – F6.03, F6.06 задано значение
36).
Параметры F8.38 – F8.41
F8.38
Значение обнаружения произвольного тока
1
Значение
по умолчанию
100.0 %
Диапазон значений
0.0 % – 300.0 %
Когда значение выходного тока преобразователя находится в диапазоне F8.38 ± F8.39, тогда срабатывает
дискретный выход с назначенной функцией “Уровень нагрузки 1 (F8.38)”
(в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
28).
Когда значение выходного тока преобразователя находится в диапазоне F8.40 ± F8.41, тогда срабатывает
дискретный выход с назначенной функцией “Уровень нагрузки 2 (F8.40)”
(в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
29).
Параметры F8.42 – F8.44
F8.42
Режим ПЧВ для работы по таймеру с импульсным
выходом
Значение
по умолчанию
0
Диапазон значений
0
Выключен
1
Включен
Если включен режим работы ПЧВ по таймеру (в параметре F8.42 задано значение 1), то после подачи команды
на пуск начинается обратный отсчет таймера, по истечении которого
ПЧВ выполнит остановку двигателя. При этом, по окончании отсчета таймера,
сработает дискретный выход с назначенной функцией “Время таймера истекло”
(в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
30) и останется в замкнутом состоянии до полной остановки двигателя.
Если значение сигнала аналогового входа AI1 превышает значение,
заданное в параметре F8.46 или ниже значения,
заданного в параметре F8.45, то сработает
дискретный выход с назначенной функцией “Превышен предел входного
сигнала AI1” (в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
31).
Параметры F8.47
F8.47
Порог температуры IGBT-модуля
Значение
по умолчанию
75 °С
Диапазон значений
0 °С – 100 °С
Если температура IGBT-модуля (см. параметр F7.07) достигла значения
уставки, заданной в параметре F8.47, то срабатывает дискретный выход с назначенной функцией “Перегрев
IGBT-модуля (F7.07 = F8.47)” (в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
35).
Параметр F8.48
F8.48
Защита от быстрого возрастания тока
Значение
по умолчанию
1
Диапазон значений
0
Выключена
1
Включена
Включение функции быстрого ограничения тока может свести к минимуму
ошибки перегрузки по току и защитить преобразователь частоты. При
срабатывании данной защиты и перехода ПЧВ в состояние быстрого ограничения
тока, в течение некоторого времени будет выдана ошибка Err40 (“Несоответствие
нагрузки и мощности инвертора”).
Группа F9: ПИД-регулятор
ПИД-регулирование – распространенный метод регулирования, часто
используемый в управлении технологическими процессами. Данный метод
обеспечивает регулирование выходной частоты ПЧВ на основе пропорциональных,
интегральных и дифференциальных вычислений по разности между сигналом
обратной связи контролируемой величины и заданной уставкой, образуя
систему отрицательной обратной связи. ПИД-регулирование подходит для
управления такими процессами, как регулирование расхода, давления
или температуры.
Структурная схема ПИД-регулятора представлена на рисунке.
Структурная схема
ПИД-регулятора
Для работы с параметрами группы F9 необходимо выбрать ПИД-регулятор
в качестве источника задания частоты (в параметрах F0.03, F0.04 задать значение
8).
Параметр F9.00
F9.00
Выбор способа задания уставки ПИД-регулятора
Значение
по умолчанию
1
Диапазон значений
0
Панель управления. Заданное значение
ПИД-регулятора определяется значением параметра F9.01
1
Аналоговый вход AI1. Задание уставки
ПИД-регулятора с помощью сигнала напряжения
2
Аналоговый вход AI2. Задание уставки
ПИД-регулятора с помощью сигнала напряжения/токового сигнала
3
Резерв
4
Импульсный вход DI6
5
Интерфейс RS-485
6
Многоскоростной режим
Данный параметр определяет способ задания уставки ПИД-регулятора.
Уставка задается в качестве относительной величины: значение уставки
равное 100% соответствует 100% величины сигнала обратной связи (например,
от датчика давления, подключенного к аналоговому входу).
Параметр F9.01
F9.01
Уставка или значение обратной связи
панели
Значение
по умолчанию
50.0 %
Диапазон значений
0.0 % – 100.0 %
Данный параметр используется для задания величины уставки, когда
в параметре F9.00 задано значение 0. Опорным значением
параметра F9.01 является величина сигнала обратной
связи в системе.
Параметр F9.02
F9.02
Источник обратной связи ПИД-регулятора
Значение
по умолчанию
0
Диапазон значений
0
Аналоговый вход AI1
1
Аналоговый вход AI2
2
Резерв
3
Разница AI1 – AI2
4
Импульсный вход DI6
5
Интерфейс RS-485
6
Сумма AI1 + AI2
7
Максимальный сигнал среди AI1/AI2
8
Минимальный сигнал среди AI1/AI2
Параметр F9.02 используется для выбора источника сигнала обратной
связи ПИД-регулятора.
Если сигнал обратной связи поступает от датчика давления или температуры,
подключенного к одному из аналоговых входов ПЧВ, то в качестве источника
обратной связи в параметре F9.02 необходимо выбрать соответствующий
аналоговый вход:
AI1 является аналоговым входом сигнала напряжения 0 – 10 В;
AI2 является универсальным аналоговым входом (сигнала напряжения
0 – 10 В или сигнала тока 4 – 20 мА), выбор режима работы осуществляется
при помощи джампера J2.
Параметр F9.03
F9.03
Источник обратной связи ПИД-регулятора
Значение
по умолчанию
0
Диапазон значений
0
Положительная обратная связь
1
Отрицательная обратная связь
0: Положительная обратная связь
Применяется,
когда при превышении сигналом обратной связи значения заданной уставки,
необходимо снизить выходную частоту преобразователя, чтобы обеспечить
баланс. Примеры применения: водоснабжение, газоснабжение, контроль
натяжения намотки;
1: Отрицательная обратная связь
Применяется,
когда при превышении сигналом обратной связи значения уставки, необходимо
увеличить выходную частоту преобразователя, чтобы обеспечить баланс.
Примеры применения: температурный контроль центральной системы кондиционирования,
контроль натяжения при размотке.
Переключение между положительной и отрицательной обратной связью
можно осуществить с помощью дискретного входа с назначенной функцией
“Переключение характеристики ПИД-регулятора” (в соответствующем параметре F5.00 – F5.05, F5.10 задано значение
35).
Параметр F9.04
F9.04
Диапазон задания обратной связи ПИД-регулятора
Значение
по умолчанию
1000
Диапазон значений
0 – 65535
Параметр F9.04 используется для отображения величины сигнала
обратной связи в виде абсолютного значения контролируемого параметра
(например, давления). Для вывода величины сигнала обратной связи на
ЛПО, в параметре F7.04 должно быть выбрано
“Бит 00: Обратная связь ПИД”.
Значение параметра F9.04 определяется соотношением:где
Ддатч. – абсолютное значение контролируемого параметра,
соответствующее 100 % величины сигнала обратной связи (измеряемый
диапазон датчика).
Пример
На ЛПО требуется отображать абсолютное значение сигнала обратной
связи от датчика избыточного давления с характеристиками:
измеряемый диапазон: от 0 до 1,6 МПа;
выходной сигнал датчика: от 0 до 10 В.
Последовательность действий настройки:
В параметре F7.04 выбираем “Бит
00: Обратная связь ПИД” для отображения величины сигнала обратной
связи на ЛПО;
Определяем значение, которое требуется задать в параметре F9.04.
Поскольку диапазон измерения подключенного датчика давления
составляет от 0 до 1,6 МПа, то значение давления, соответствующее
100 % величины сигнала обратной связи (10 В) Ддатч. = 1,6 МПа. Следовательно, F9.04
= 10 × 1,6 = 16;
На ЛПО будет отображаться величина сигнала обратной связи в виде
значений от “0” до “1,6”, где “0” соответствует значению давления
0 МПа, а ”1,6” – значению давления 1,6 МПа.
Параметры F9.05 – F9.07
F9.05
Пропорциональная составляющая P1
Значение
по умолчанию
20.0
Диапазон значений
0.0 – 100.0
Пропорциональная составляющая P1 (F9.05)
В параметре F9.05 задается пропорциональный
коэффициент (P).
Этот коэффициент определяет степень реакции
на текущую ошибку – разницу между требуемым значением параметра (уставкой)
и его текущим значением. Чем больше эта ошибка, тем сильнее воздействие
регулятора. Однако, слишком большое значение этого коэффициента приводит
к нестабильной работе системы и постоянному перерегулированию.
Время интегрирования I1 (F9.06)
В параметре F9.06 задается интегральный коэффициент (I).
Этот коэффициент служит для корректировки ошибок, которые накапливаются
со временем. Если ошибка остаётся длительное время, даже небольшое
значение интегрального коэффициента обеспечивает ее “накапливание”
и корректировку управления, чтобы компенсировать отклонение. Таким
образом, при заданном значении интегрального коэффициента, действие
системы направлено на исправление возникающего в ней постоянного смещения,
чтобы результат ее работы точно соответствовал заданной уставке контролируемого
параметра.
Дифференциальная составляющая D1 (F9.07)
В параметре F9.07 задается дифференциальный
коэффициент (D).
Дифференциальный коэффициент определяет реакцию
системы на скорость изменения ошибки. При быстром уменьшении или увеличении
ошибки, дифференциальный коэффициент “сглаживает” реакцию системы,
чтобы избежать резких скачков. Если, в результате быстрого изменения
ошибки, система движется к цели слишком быстро, дифференциальный коэффициент
замедляет этот процесс, чтобы не “проскочить” целевую точку и обеспечить
плавный подвод системы к значению заданной уставки контролируемого
параметра.
Каждый из этих трех коэффициентов выполняет свою функцию и, в совокупности,
они помогают добиться плавного и точного управления.
Значение частоты обратного среза, задаваемое в параметре F9.08, определяет границу фильтрации для высокочастотного
шума в дифференциальной составляющей ПИД-регулятора, чтобы обеспечить
устойчивую работу системы.
Параметр F9.09 служит для управления регулированием
в зависимости от величины текущей ошибки (отклонения обратной связи):
ПИД-регулятор прекращает регулирование, когда отклонение обратной
связи находится в пределах диапазона, заданного в параметре F9.09.
Значение данного параметра определяет уровень воздействия дифференциальной
составляющей на процесс ПИД-регулирования.
Примечание
Влияние
дифференциальной составляющей на процесс ПИД-регулирования является
существенным и может привести к нестабильной работе системы при больших
значениях параметра F9.10.
Параметр F9.11
F9.11
Время изменения значения уставки
Значение
по умолчанию
0.00 с
Диапазон значений
0.00 с – 650.00 с
Параметр F9.11 определяет скорость изменения
выходного сигнала ПИД-регулятора при изменении уставки контролируемого
параметра.
При изменении значения уставки выходной сигнал ПИД-регулятора не
изменяется мгновенно, а в течение определенного времени. В данном
параметре задается время, в течение которого после изменения уставки
выходной сигнал ПИД-регулятора изменится от 0 % до 100 %.
Параметры F9.12 и F9.13
F9.12
Время фильтра для обратной связи
Значение
по умолчанию
0.00 с
Диапазон значений
0.00 с – 60.00 с
Фильтры по сигналу обратной связи (параметр F9.12) и по выходному сигналу ПИД-регулятора (параметр F9.13) используются, чтобы исключить резкие изменения в системе.
Параметры F9.14 – F9.16
F9.14
Пропорциональная составляющая P2
Значение
по умолчанию
20.0
Диапазон значений
0.0 – 100.0
Параметры F9.14 – F9.16 используются в качестве второй группы коэффициентов
ПИД-регулятора, их функции полностью аналогичны функциям параметров F9.05 – F9.07.
Данные параметры требуются для задач, предполагающих наличие второго
набора коэффициентов ПИД-регулятора. Условия переключения коэффициентов
задаются в параметре F9.17. Если переключение
коэффициентов не требуется, то по умолчанию используются значения,
заданные в параметрах F9.05 – F9.07.
Параметры F9.17 – F9.19
F9.17
Условия переключения параметров ПИД-регулятора
Значение
по умолчанию
0
Диапазон значений
0
Без возможности переключения
1
Переключение с помощью клеммы DI
2
Переключение в соответствии с величиной
ошибки регулирования
Параметр F9.17 используется для переключения
между двумя наборами коэффициентов ПИД-регулятора (см. параметры F9.05 – F9.07 и F9.14 – F9.16).
По умолчанию в параметре F9.17 задано значение
0, при данном значении параметра функция переключения коэффициентов
не задействована и применяются только значения, заданные в параметрах F9.05 – F9.07.
Когда в параметре F9.17 задано значение
1, задействована функция переключения коэффициентов с помощью дискретного
входа. Для этого соответствующему дискретному входу необходимо назначить
функцию “Переключение коэффициентов ПИД-регулятора” (задать значение
43 в соответствующем параметре F5.00 – F5.05. По активному
сигналу на данном дискретном входе задействуется вторая группа коэффициентов
ПИД-регулятора (F9.14 – F9.16).
Когда в параметре F9.17 задано значение
2, переключение коэффициентов осуществляется автоматически и определяется
значениями, заданными в параметрах F9.18 и F9.19:
если отклонение между значением заданной уставки и величиной
сигнала обратной связи меньше значения, заданного чем параметре F9.18, то используется первая группа коэффициентов
ПИД-регулятора (F9.05 – F9.07);
если отклонение между значением заданной уставки и величиной
сигнала обратной связи больше значения, заданного чем параметре F9.19, то используется вторая группа коэффициентов
ПИД-регулятора (F9.14 – F9.16).
Параметры F9.20 и F9.21
F9.20
Предустановленное значение выхода ПИД-регулятора
Значение
по умолчанию
0.0 %
Диапазон значений
0.0 % – 100.0 %
При необходимости, во время пуска, ПИД-регулятор может работать
с предустановленным значением выходного сигнала, которое задается
в параметре F9.20. Время работы ПИД-регулятора с
предустановленным значением выходного сигнала задается в параметре F9.21. По истечении заданного времени ПИД-регулятор
автоматически начнет работу в обычном режиме по сигналу обратной связи.
Параметры F9.22 и F9.23
F9.22
Максимальное отклонение на выходе ПИД-регулятора
при прямом вращении
Значение
по умолчанию
1.00 %
Диапазон значений
0.00 % – 100.00 %
Параметры F9.22 и F9.23 служат для обеспечения плавности изменения выходного
сигнала ПИД-регулятора.
Сигнал на выходе ПИД-регулятора изменяется пошагово с фиксированным
шагом равным 2 мс. Величина изменения выходного сигнала ПИД-регулятора
за один шаг (2 мс) ограничивается значением, задаваемым в параметре F9.22 (при прямом вращения вала двигателя) и значением,
задаваемым в параметре F9.23 (при обратном
вращении вала двигателя).
Данное ограничение величины изменения выходного сигнала требуется
для предотвращения резких скачков и колебаний выходного сигнала ПИД-регулятора,
особенно при резких изменениях величины ошибки.
Параметр F9.24
F9.24
Свойства интегральной составляющей ПИД-регулятора
Значение
по умолчанию
00
Диапазон значений
0х
Разделение интегральной составляющей
0
Выключено
1
Включено
х0
Действия при достижении крайнего значения
0
Продолжить вычисления
1
Остановить вычисления
Включение функции разделения интегральной составляющей (в разряде
0х параметра F9.24 задано значение
1) позволяет исключить интегральную составляющую из процесса регулирования.
Отключение интегральной составляющей выполняется по активному сигналу
на дискретном входе с назначенной функцией “Отключение интегральной
составляющей ПИД-регулятора” (в соответствующем параметре F5.00 – F5.05, F5.10 задано значение
38).
При достижении выходного сигнала ПИД-регулятора одного из крайних
значений (максимального или минимального) на выбор предоставляется
две опции:
интегральная составляющая продолжит процесс своих вычислений
(в разряде х0 параметра F9.24 задано значение
0);
интегральная составляющая остановит процесс своих вычислений
(в разряде х0 параметра F9.24 задано значение
1).
Параметры F9.25 и F9.26
F9.25
Значение обнаружения обрыва обратной
связи
Значение
по умолчанию
0.0 %
Диапазон значений
0.0 % (обрыв обратной связи не отслеживается)
0.1 % – 100.0
%
Если величина сигнала обратной связи ПИД-регулятора становится
меньше значения обнаружения обрыва обратной, связи, заданного в параметре F9.25 в течение времени, заданного в параметре F9.26, то преобразователь сообщает о неисправности
и переходит в предустановленный режим работы при обнаружении неисправности
(см. параметр FA15).
Параметр F9.27
F9.27
Работа ПИД-регулятора при останове
Значение
по умолчанию
0
Диапазон значений
0
ПИД-регулирование выключено при останове
1
ПИД-регулирование активно при останове
Когда преобразователь частоты находится в режиме “СТОП” и ожидает
команду на пуск двигателя, его выходная частота может изменяться в
режиме реального времени в соответствии с сигналом обратной связи.
Для этого необходимо включить ПИД-регулирование при останове (в параметре F9.27 задать значение 1). В данном режиме вал двигателя
не вращается, ПЧВ ожидает команды на пуск, но при этом отображает
выходную частоту на панели оператора, осуществляя ПИД-регулирование
по сигналу обратной связи.
Параметр F9.28
F9.28
Активация режима сна
Значение
по умолчанию
0
Диапазон значений
0
Выключен
1
Включен
Параметр F9.28 используется для программного
включения и отключения функции спящего режима.
Когда включена функция спящего режима (в параметре F9.28 задано значение 1), обеспечивается автоматическое
отключение (режим сна) и выдача (режим пробуждения) выходной частоты
в зависимости от значений, заданных в параметрах спящего режима F9.29 – F9.32 и уставки PID-регулятора,
заданного в параметре F9.01.
Спящий режим может использоваться в ситуациях, когда штатная работа
системы предполагает интервалы простоя и постоянная работа ПЧВ экономически
нецелесообразна. Во время таких интервалов спящий режим, снижая выходную
частоту до нуля, позволяет сократить энергопотребление и, в тоже время,
не допускает нарушения штатных условий работы системы (слишком высокое
давление, переохлаждение воды в охладительных колоннах, проблемы герметизации
здания). Кроме этого, возможны ситуации, когда ПЧВ используется совместно
с устройствами, не позволяющими ПЧВ снижать скорость двигателя, что
может стать причиной раннего износа насосных систем, преждевременной
выработке смазки в коробках передач или неравномерной работе вентиляторов.
В таких случаях также может быть задействован спящий режим.
Параметры F9.29 – F9.32
F9.29
Значение активации режима сна
Значение
по умолчанию
60.0 %
Диапазон значений
0.0 % – 100.0 %
Значения параметров F9.29 – F9.32 определяют работу функции спящего режима.
Наглядная иллюстрация логики работы спящего режима с использованием
данных параметров показана в примере, приведенном ниже.
Пример
Задача: поддержание давления по сигналу обратной связи,
поступающего от датчика давления, с использованием спящего режима.
Значение активации режима пробуждения (F9.31): 40.0 %;
Задержка при переходе в режим пробуждения (F9.32): 3.0 с.
Описание работы спящего режима с заданными параметрами
приведено ниже.
Спящий режим опирается на значение сигнала обратной
связи, поступающего от датчика давления 4 – 20
мА. Диапазон измерения датчика от 0 до 16 бар
соответствует диапазону выходного тока датчика от 4 мА до 20 мА (значение 0 бар соответствует выходному
току 4 мА, а значение 16 бар – выходному току 20 мА).
В параметре F9.01 задано значение уставки 50,0 %, что соответствует
выходному току датчика 12 мА. При значении сигнала обратной связи
менее 12 мА скорость изменяется по ПИД-закону. При достижении значения
12 мА, то есть уставки, заданной в параметре F9.01, скорость начинает снижаться. Если значение сигнала обратной связи
превышает 12 мА и достигает порогового значения 60%, заданного в параметре F9.29 (ток на выходе датчика давления составляет 13,6
мА и выше), то ПЧВ выжидает время, заданное в параметре F9.30 (3,0 с) и затем переходит в режим сна, в котором
выходная частота сбрасывается до нуля.
Для выхода из режима
сна значение сигнала обратной связи, поступающего от датчика давления,
должно стать ниже порогового значения 40,0 %, заданного в параметре F9.31 (ток на выходе датчика давления менее 10,4 мА)
и оставаться ниже порогового значения в течение времени, заданного
в параметре F9.32 (3,0 с). По истечении этого времени
ПЧВ выйдет из режима сна и обеспечит выдачу выходной частоты.
Диаграмма, поясняющая логику работы функции спящего режима, представлена
на рисунке.
Работа функции спящего
режима
Группа FA: Параметры защиты
Параметр FA.00
FA.00
Защита двигателя от перегрузки
Значение
по умолчанию
1
Диапазон значений
0
Выключена
1
Включена
Если встроенная защита двигателя от перегрузки выключена (в параметре FA.00 задано значение 0), то для его защиты необходимо
устанавливать в моторную цепь ПЧВ тепловое реле.
Если встроенная защита двигателя от перегрузки включена (в параметре FA.00 задано значение 1), то для отстройки срабатывания
встроенной защиты используется параметр FA.01, в котором задается коэффициент, определяющий ток срабатывания защиты
от перегрузки.
Параметр FA.01
FA.01
Коэффициент усиления защиты двигателя
от перегрузки
Значение
по умолчанию
1.00
Диапазон значений
0.20 – 10.00
Параметр FA.01 используется, если в параметре FA.00 задано значение 1 (включена встроенная защита
двигателя от перегрузки).
В параметре FA.01 задается значение
коэффициента усиления защиты двигателя от перегрузки, определяющее
ток срабатывания встроенной защиты двигателя от перегрузки.
Значение коэффициента определяется из соотношения: где:
Iзащит. – ток срабатывания встроенной защиты двигателя
от перегрузки;
λ – номинальная перегрузочная способность двигателя.
Чем выше значение параметра FA.01, тем при большем токе перегрузки произойдет срабатывание защиты.
Параметр FA.02
FA.02
Уровень перегрузки, при котором выдается
предупреждение
Значение
по умолчанию
80 %
Диапазон значений
50 % – 100 %
Если для релейного или дискретного выхода назначена функция “Предупреждение
о перегрузке электродвигателя” (в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
6), то при достижении значения тока двигателя, заданного в параметре FA.02 замкнется соответствующий дискретный выход.
Значение данного параметра задается в процентах от тока перегрузки
двигателя.
Параметр FA.03
FA.03
Коэффициент подавления перенапряжения
Значение
по умолчанию
10
Диапазон значений
0– выключен
1 – 100
Чем больше значение коэффициента подавления перенапряжения FA.03, тем сильнее у преобразователя частоты способность
подавлять перенапряжение, во время которого отслеживается напряжение
на шине постоянного тока, не давая ПЧВ войти в генераторный режим.
Чем выше инерция нагрузки на валу двигателя, тем больше должно
быть значение коэффициента FA.03.
Параметр FA.04
FA.04
Уставка срабатывания защиты по перенапряжению
Значение
по умолчанию
130 %
Диапазон значений
120 % – 150 %
Данный параметр работает совместно с параметром FA.03.
В параметре FA.04 задается значение
уставки срабатывания защиты по обнаружению перенапряжения. При превышении
этого значения преобразователь частоты начинает выполнять функцию
защиты от перенапряжения. Значение параметра задается в процентах
от номинального напряжения двигателя.
Параметр FA.05
FA.05
Коэффициент подавления превышения тока
Значение
по умолчанию
В зависимости
от модификации ПЧВ
Диапазон
значений
0 – 100
Чем больше значение коэффициента подавления превышения тока FA.05, тем сильнее у преобразователя частоты способность
подавлять сверхток.
Чем выше инерция нагрузки на валу двигателя, тем больше должно
быть значение коэффициента FA.05.
Параметр FA.06
FA.06
Уставка срабатывания защиты по превышению
тока
Значение
по умолчанию
150 %
Диапазон значений
100 % – 200 %
Данный параметр работает совместно с параметром FA.05.
В параметре FA.06 задается значение
уставки срабатывания защиты по превышению тока. При превышении этого
значения преобразователь частоты начинает выполнять функцию защиты
от сверхтока. Значение параметра задается в процентах от номинального
тока двигателя.
Параметр FA.07
FA.07
Защита от короткого замыкания на землю
при включении
Значение
по умолчанию
1
Диапазон значений
0
Выкл
1
Вкл
В параметре FA.07 активируется функция
защиты от короткого замыкания на землю при подаче питания на ПЧВ.
Когда данная функция активна (в параметре FA.07 задано значение 1), для обнаружения короткого замыкания на землю
в двигателе, в момент подачи питания, ПЧВ будет выдавать на двигатель
кратковременный сигнал.
Параметр FA.08
FA.08
Количество автосбросов аварий
Значение
по умолчанию
0
Диапазон значений
0 – 5
Преобразователь частоты оснащен функцией автоматического сброса
аварий, работа которой аналогична функции АПВ (автоматическое повторное
включение). В параметре FA.08 задается число
выполняемых автоматических сбросов аварий. Интервал времени с момента
возникновения аварии до ее автоматического сброса задается в параметре FA.10.
При возникновении аварии ПЧВ переходит в аварийный режим: на встроенной
панели оператора отображается код аварии (ошибка), начинает мигать
индикатор “Авария”, ПЧВ выполняет останов двигателя.
Если число произошедших аварий не превысило значения, заданного
в параметре FA.08, то по истечении времени, заданного
в параметре FA.10 ПЧВ выполняет автоматический сброс
аварии. После автоматического сброса аварии необходимо заново подавать
команду на пуск двигателя.
Если число произошедших аварий превысило значение, заданное в параметре FA.08, то автоматический сброс аварии не выполняется
и ПЧВ будет находиться в аварийном режиме до выполнения оператором
сброса аварии вручную.
Параметр FA.09
FA.09
Режим работы релейного выхода DO при
автосбросе
Значение
по умолчанию
0
Диапазон значений
0
Не срабатывает
1
Срабатывает
Значение параметра FA.09 определяет режим
работы дискретного выхода ПЧВ с назначенной функцией “Авария” (в соответствующем
параметре (в соответствующем параметре F6.01 – F6.03, F6.06 задано значение
2).
0: Не срабатывает
Дискретный выход с назначенной
функцией “Авария” не срабатывает при возникновении аварии и остается
разомкнутым до тех пор, пока число автосбросов аварий не превысит
значения, заданного в параметре FA.08. Срабатывание дискретного входа происходит только при возникновении
аварии, превышающей заданное число автосбросов аварий.
Пример
К контактам T1A–T1C релейного выхода 1 с назначенной функцией
“Авария” (в параметре F6.02 задано значение
2) подключена аварийная сигнализация.
Режим срабатывания дискретного
выхода: только по превышению числа автосбросов (в параметре FA.09 задано значение 0).
Число автосбросов:
3 (в параметре FA.08 задано значение
3).
Работа релейного выхода будет следующей: при возникновении
первых трех аварий и их автосбросах, срабатывания релейного выхода
1 не произойдет (контакты T1A–T1C разомкнуты). При возникновении четвертой
аварии, произойдет срабатывание релейного выхода 1 и контакты T1A–T1C
замкнутся.
1: Срабатывает
Дискретный выход с назначенной
функцией “Авария” срабатывает при возникновении каждой аварии, независимо
от значения параметра FA.08.
Параметр FA.10
FA.10
Время задержки между возникновением
аварии и автосбросом
Значение
по умолчанию
1.0 с
Диапазон значений
0.1 с – 100.0 с
Если в настройках ПЧВ выбрана функция автосброса аварий (значение
параметра FA.08 не равно нулю), то с момента возникновения
аварии до ее автоматического сброса пройдет время, заданное в параметре FA.10.
Параметры FA.11 и FA.12
FA.11
Защита от обрыва фаз на входе преобразователя
частоты
Значение
по умолчанию
В зависимости
от модификации ПЧВ
Диапазон значений
0
Выкл
1
Вкл
ПЧВ оснащен функцией защиты от обрыва фаз на входе и выходе. Если
защита включена (в параметрах FA.11, FA.12 задано значение 1), то при обнаружении
обрыва фазных цепей ПЧВ перейдет в аварийный режим и отобразит на
панели оператора код соответствующей ошибки.
Параметры FA.13 и FA.15
FA.13
Действия 1 при обнаружении аварии
Значение
по умолчанию
00000
Диапазон значений
0000х
Перегрузка двигателя (Err11)
000х0
Потеря фазы на входе (Err12)
00х00
Потеря фазы на выходе (Err13)
0х000
Неисправность внешнего оборудования
(Err15)
х0000
Ошибка связи (Err16)
0
Останов выбегом
1
Останов в соответствии с выбранным
режимом остановки
2
Продолжить работу
Значения параметров FA.13 и FA.15 определяют действия, которые будут выполняться
ПЧВ при обнаружении соответствующей аварии.
Если в качестве действия при обнаружении аварии выбран “Останов
выбегом”:
двигатель останавливается выбегом;
на ЛПО сразу отображается соответствующий код аварии “Err**”.
Если в качестве действия при обнаружении аварии выбран “Останов
в соответствии с выбранным режимом остановки”:
двигатель останавливается с заданным временем торможения;
во время торможения на ЛПО отображается код аварии “А**” с
указанием номера аварии;
после полного останова код аварии, отображаемый на ЛПО, изменяется
на “Err**”.
Если в качестве действия при обнаружении аварии выбрано “Продолжить
работу”:
ПЧВ продолжает работу;
на ЛПО отображается код аварии “А**” с указанием номера аварии;
частота, на которой двигатель продолжит работу, определяется
значением параметров FA.20 и FA.21.
Если в качестве действия при обнаружении аварии выбрано “Выходная
частота двигателя ограничивается до 7% от заданного значения”:
ПЧВ продолжает работу на частоте, равной 7% от заданной;
на ЛПО отображается код аварии “А30”;
условия срабатывания защиты от потери нагрузки задаются в параметрах FA.26 – FA.28.
Параметр FA.16
FA.16
Интегральный коэффициент перегрузки
по току
Значение
по умолчанию
500
Диапазон значений
1 – 2000
Значение в данном параметре определяет скорость отклика ПЧВ при
защите от перегрузки по току.
Чем больше значение данного параметра, тем ниже скорость отклика
ПЧВ, но работа системы в целом более стабильна. Чем меньше значение
этого параметр, тем выше скорость отклика, но при этом повышается
вероятность возникновения в системе колебаний или перерегулирования.
Параметр FA.17
FA.17
Мгновенная остановка/без остановки
Значение
по умолчанию
0
Диапазон значений
0
Общепромышленное применение
1
Механизмы с переменным моментом сопротивления
В данном параметре указывается тип оборудования, совместно с которым
используется ПЧВ. Это необходимо для обеспечения корректной работы
защиты при мгновенной потери питания (см. параметры FA.22 – FA.25).
Тип “Общепромышленное применение” следует указывать, если
ПЧВ используется с механизмами, имеющими практически постоянный момент
сопротивления.
Тип “Механизмы с переменным моментом сопротивления” следует
указывать, если ПЧВ используется с механизмами, имеющими переменный
момент сопротивления (насосы, вентиляторы и т. д.).
Параметр FA.18
FA.18
Значение коэффициента для функции защиты
от пониженного напряжения
Значение
по умолчанию
100.0 %
Диапазон значений
60.0 % – 140.0 %
В данном параметре задается пороговое значение (коэффициент), в
соответствии с которым происходит срабатывание защиты от пониженного
напряжения.
Значение параметра задается в процентах: 100 % соответствует напряжению
350 В.
При снижении напряжения менее значения, заданного в данном параметре,
ПЧВ переходит в аварийный режим с выдачей ошибки по пониженному напряжению
(Err9).
Параметр FA.19
FA.19
Значения напряжения на DC шине для функции
подавления
Значение
по умолчанию
400.0 В
Диапазон значений
200.0 В – 810.0 В
Как правило, значение этого параметра устанавливается на заводе
и после этого не изменяется. Если во время эксплуатации ПЧВ регулярно
возникают аварии по перенапряжению, то необходимо обратиться в сервисный
центр либо запросить техническую поддержку.
Если во время работы ПЧВ возникает некритичная неисправность, то
на ЛПО выдается предупреждение “А**” и ПЧВ продолжает работать в соответствии
с режимом, заданным в параметрах FA.20 – FA.21.
Параметры FA.22 – FA.25
FA.22
Действие при мгновенной потере питания
Значение
по умолчанию
0
Диапазон значений
0
Не выбрано
1
Останов с временем торможения 1
2
Останов с временем торможения 2
В параметре FA.22 задаются действия,
выполняемые ПЧВ при срабатывании защиты от мгновенной потери питания.
В параметре FA.25 задается уставка
по напряжению, ниже которой срабатывает защита от мгновенной потери
питания и выполняются действия, выбранные в параметре FA.22.
В параметре FA.23 задается уставка
по напряжению, выше которой, после срабатывания защиты от мгновенной
потери питания, ПЧВ возвращается в нормальный режим работы.
В параметре FA.24 задается время,
через которое ПЧВ выполнит переход в нормальный режим работы с момента
выполнения условия, заданного в параметре FA.23.
В случае мгновенного отключения питания или резкого падения напряжения
преобразователь частоты снизит выходную скорость и компенсирует падение
напряжения, возвращая энергию через нагрузку для поддержания работы
в течение короткого времени.
Примечание
Если время торможения при мгновенном отключении
питания слишком велико, а инерция нагрузки мала, то падение напряжения
не может быть эффективно скомпенсировано за счет нагрузки.
Если
время торможения слишком мало, а инерция нагрузки велика, то может
произойти обратная ситуация – напряжение резко возрастет, что приведет
к срабатыванию защиты от перенапряжения.
Параметры FA.26 – FA.28
FA.26
Защита от работы без нагрузки
Значение
по умолчанию
0
Диапазон значений
0
Выкл
1
Вкл
Если включена защита от работы ПЧВ без нагрузки (в параметре FA.26 задано значение 1), то когда значение выходного
тока падает ниже уставки, заданной в параметре FA.27, ПЧВ обнаруживает
аварию потери нагрузки и отображает на ЛПО код аварии “Err30”. Время
между обнаружением данной аварии и выдачей на ЛПО кода аварии задается
в параметре FA.28.
Действия, выполняемые ПЧВ при обнаружении данной аварии, задаются
в параметре FA.15.
Параметр FA.29
FA.29
Установка десятичной точки для частоты
во время аварии
Значение
по умолчанию
222
Диапазон значений
00х
Положение десятичной точки частоты
аварии 3
0х0
Положение десятичной точки частоты
аварии 2
х00
Положение десятичной точки частоты
аварии 1
1
1 знак после запятой
2
2 знака после запятой
Поскольку положение десятичной точки для рабочей частоты может
быть изменено пользователем, то этот параметр позволяет также изменить
положение десятичной точки, но уже для значения частоты, при котором
произошла авария.
Группа FB: Контроль натяжения
Контроль натяжения осуществляется с использованием режима качания
частоты. Режим качания частоты подходит для производств, в которых
требуется намотка и размотка готовой продукции, например, в текстильной
промышленности.
Принцип функции качания частоты заключается в том, что значение
выходной частоты ПЧВ последовательно увеличивается и уменьшается (“качается”
вверх и вниз) относительно заданной выходной частоты. Источник выходной
частоты, относительно которой происходит качение, может быть выбран
в параметрах F0.03, F0.04 и F0.07, либо может использоваться
значение максимальной выходной частоты, заданное в параметре F0.10.
Амплитуда колебаний определяется значениями параметров FB.01 и FB.02. Если значения
этих параметров равны нулю, то выходная частота не совершает колебаний.
Иллюстрация работы режима качания частоты приведена на рисунке.
f зад. – заданная частота, относительно которой происходит качание;
Значение параметра FB.00 определяет частоту,
относительно которой будет происходить качание:
0: Относительно центральной частоты (F0.07)
Поскольку амплитуда качания частоты задается в процентах, то она
будет в прямой зависимости от источника задания частоты, который выбран
в параметрах F0.03, F0.04 и F0.07.
1: Относительно максимальной частоты (F0.10)
Амплитуда качания частоты закреплена за максимальной выходной
частотой F0.10.
Параметры FB.01 и FB.02
FB.01
Амплитуда качания
Значение
по умолчанию
0.0 %
Диапазон значений
0.0 % – 100.0 %
Амплитуда качания (параметр FB.01) задается в процентах относительно частоты, выбранной в параметре FB.00.
Амплитуда скачка частоты (параметр FB.02) задается в процентах относительно амплитуды качания, заданной в
параметре FB.01.
Пример
Задача: требуется, чтобы качание частоты происходило относительно
максимальной выходной частоты с амплитудой качания 5 Гц и амплитудой
скачка частоты 1 Гц.
Значение максимальной выходной частоты
равно 50 Гц (в параметре F0.10 задано значение
50 Гц).
Настройка параметров:
В параметре FB.00 задаем значение
1 (в качестве частоты, относительно которой будут происходить колебания
выбрана максимальная выходная частота).
В параметре FB.01 задаем значение
амплитуды качания 10 %, которое относительно значения максимальной
выходной частоты (50 Гц) составляет 5 Гц.
В параметре FB.02 задаем значение
амплитуды скачка частоты 20 %, которое относительно заданного значения
амплитуды качания 5 Гц (FB.01) составляет 1
Гц.
При заданных настройках выходная частота ПЧВ будет изменяться
в пределах от 45 до 55 Гц (50 Гц ± 10 %) с амплитудой скачка частоты
равной 1 Гц.
Параметры FB.03 и FB.04
FB.03
Цикл частоты качания
Значение
по умолчанию
10.0 с
Диапазон значений
0.0 с – 3000.0 с
Значение параметра FB.03 устанавливает
длительность цикла частоты качания tцикл. (см. рисунок). Время, задаваемое в параметре FB.03, не зависит от времени разгона/торможения ПЧВ.
Коэффициент времени нарастания пилообразного сигнала, задаваемый
в параметре FB.04, напрямую влияет на вид колебаний
выходной частоты, определяя соотношение между временем нарастания
(tнараст.) и временем спада (tспад.) пилообразного
сигнала в пределах длительности цикла tцикл. (FB.03):
Если в параметре FB.04 задано значение
50 %, то частота будет симметрично увеличиваться и уменьшаться с одинаковой
скоростью и временем.
Параметры FB.05 – FB.07
FB.05
Заданная длина
Значение
по умолчанию
1000 м
Диапазон значений
0 м – 65535 м
С помощью преобразователя частоты можно осуществлять подсчет длины
продукции, используя дискретный вход прибора. Для этого одному из
многофункциональных дискретных входов необходимо назначить функцию
“Вход для счета длины” (в соответствующем параметре F5.00 – F5.05 задано значение
27). Дискретный вход с данной функцией выполняет подсчет количества
импульсов, определяющего длину намотки. Если частота входных сигналов
велика, то рекомендуется использовать импульсный дискретный вход DI6
(см. группу параметров F5).
Фактическая длина (значение в параметре FB.06) рассчитывается следующим образом:где
Когда значение фактической длины намотки (параметр FB.06) превысит значение заданной длины, установленной
параметре FB.05, произойдет срабатывание дискретного
выхода с назначенной функцией “Достигнута заданная длина” (в соответствующем
параметре F6.01 – F6.06 задано значение
10).
Параметры FB.08 и FB.09
FB.08
Установка значения счетчика
Значение
по умолчанию
1000
Диапазон значений
1 – 65535
В параметрах FB.08 и FB.09 задаются уставки счетчика импульсов, осуществляющего
подсчет импульсов, поступающих на дискретные входы с назначенной функцией
подсчета импульсов (см. группу параметров F5).
В параметре FB.09 задается уставка
максимального количества импульсов. Когда количество импульсов достигнет
уставки, заданной в данном параметре, произойдет срабатывание дискретного
выхода с назначенной функцией “Счетчик достиг максимального значения”
(в соответствующем параметре F6.01 – F6.06 задано значение
9). После достижения заданной уставки и срабатывания дискретного выхода
счетчик продолжит подсчет импульсов до тех пор, пока количество подсчитанных
импульсов не достигнет уставки, заданной в параметре FB.08.
В параметре FB.08 задается установленное
количество импульсов. Когда количество импульсов достигнет уставки,
заданной в данном параметре, произойдет срабатывание дискретного выхода
с назначенной функцией “Счетчик достиг установленного значения” (в
соответствующем параметре F6.01 – F6.06 задано значение
8). После достижения заданной уставки и срабатывания дискретного выхода
счетчик остановит подсчет импульсов.
Примечание
Максимальное количество импульсов, задаваемое в
параметре FB.09 не может быть больше установленного
количества импульсов, заданного в параметре FB.08.
Группа FC: Параметры связи
Параметр FC.00
FC.00
Адрес связи по протоколу Modbus
Значение
по умолчанию
Диапазон значений
0 – 247
Адрес 0 является широковещательным. Адреса slave-устройств в сети
RS-485 должны быть уникальными
Параметр FC.01
FC.01
Выбор скорости передачи данных
Значение
по умолчанию
5
Диапазон значений
0
300 бит/с
1
600 бит/с
2
1200 бит/с
3
2400 бит/с
4
4800 бит/с
5
9600 бит/с
6
19200 бит/с
7
38400 бит/с
8
57600 бит/с
9
115200 бит/с
В параметре FC.01 задается скорость передачи данных
по протоколу Modbus RTU. Чем выше скорость передачи данных, тем быстрее
будет происходить обмен данных по сети.
Примечание
Сетевые
настройки мастера сети (Master) и подчиненных устройств (Slave) должны
совпадать (за исключением адресов).
Параметр FC.02
FC.02
Формат данных по протоколу Modbus
Значение
по умолчанию
3
Диапазон значений
0
(N, 8, 2)
Без проверки;
Биты данных: 8; Стоп-бит: 2
1
(E, 8, 1)
Проверка на
четность; Биты данных: 8; Стоп-бит: 1
2
(O, 8, 1)
Проверка на
нечетность; Биты данных: 8; Стоп-бит: 1
3
(N, 8, 1)
Без проверки;
Биты данных: 8; Стоп-бит: 1
В данном параметре задается формат для обмена данных по протоколу
Modbus.
Формат обмена данных, установленный на мастере сети (Master) и
ПЧВ, должен быть одинаковым, в противном случае обмен данными невозможен.
Параметр FC.03
FC.03
Задержка ответа по протоколу Modbus
Значение
по умолчанию
2 мс
Диапазон значений
0 мс – 20 мс
Задержка ответа по протоколу Modbus подразумевает время между окончанием
приема данных преобразователем частоты и отправкой их на верхний уровень
мастеру сети. Если задержка ответа, заданная в параметре FC.03 меньше системного времени обработки данных,
то время задержки будет формироваться только за счет системного времени.
Если задержка ответа, заданная в параметре FC.03 больше системного времени обработки, то после обработки данных система
будет ждать, пока не истечет заданное время задержки, прежде чем отправить
данные мастеру сети.
Параметр FC.04
FC.04
Время неисправности таймаута связи по
протоколу Modbus
Значение
по умолчанию
0.0 с
Диапазон значений
0.0 (Выкл)
0.1 с – 60.0 с
ПЧВ оснащен функцией обнаружения неисправности таймаута связи по
протоколу Modbus.
Если в параметре FC.04 задано значение
0, то функция обнаружения неисправности таймаута связи выключена.
Когда в параметре FC.04 задано значение
отличное от нуля, ПЧВ измеряет интервал времени между двумя последовательными
сообщениями и сравнивает его со значением, заданным в параметре FC.04. Если измеренный интервал времени превышает
значение параметра FC.04, ПЧВ выдает ошибку
“Ошибка связи” (Err16).
Параметр FC.05
FC.05
Разрядность тока при считывании по протоколу
Modbus
Значение
по умолчанию
0
Диапазон значений
0
0.01 A
1
0.1 A
Данный параметр позволяет выбрать точность передаваемого значения
тока ПЧВ (до десятых долей или до сотых долей) при опросе по сети.
Группа FD: Профиль скорости (ПЛК)
ПЧВ оснащен встроенным программируемым логическим контроллером
(ПЛК), реализующего логику автоматического многосегментного управления
частотой (профиль ПЛК). Каждый сегмент представляет собой этап, для
которого пользователем задаются требуемое время работы, направление
вращения и выходная частота. Для каждого такого этапа пользователем
может быть задано необходимое время разгона и торможения. ПЛК автоматически
выполняет последовательный переход от начального этапа к последнему
по замкнутому циклу. Пользователь может настроить параметры выполняемых
этапов и цикла в соответствии с применяемым технологическим процессом.
Преобразователи этой серии поддерживают до 16-ти автоматически
переключаемых скоростей, а также установку для каждого этапа до 4-х
разных значений времени ускорения и торможения. Завершение логическим
контроллером очередного цикла, может сопровождаться сигнализацией,
для которой используются многофункциональные цифровые выходные клеммы
DO1 и DO2 или многофункциональные реле 1 и реле 2 (см. параметры F6.01 – F6.06).
Для работы со встроенным ПЛК, его необходимо выбрать в качестве
источника задания частоты, для чего в параметре F0.03 следует задать
значение 7.
Параметры FD.00 – FD.15
FD.00
Скорость этапа 0
Значение
по умолчанию
0.0 %
Диапазон значений
-100.0 % – 100.0 %
Примечание
Значение 100.0 %, задаваемое в параметрах FD.00 – FD.15 соответствует
значению максимальной выходной частоты, заданному в параметре F0.10.
Скорость каждого этапа в параметрах FD.00 – FD.15 задается в процентах от максимальной
выходной частоты, заданной в параметре F0.10. Например, если
максимальная выходная частота составляет 50 Гц, то для скорости этапа,
соответствующей частоте 25 Гц, необходимо задать значение “50 %” и
т. д.
Для обеспечения реверса, в параметре для соответствующего этапа
следует задавать отрицательное значение.
Параметры FD.16 и FD.17
FD.16
Выбор режима работы
Значение
по умолчанию
0
Диапазон значений
0
Остановка после одного цикла
1
Функционирование с текущей скоростью
после одного цикла
2
Непрерывный цикл
Параметр FD.16 служит для выбора режима работы
ПЛК:
0: Остановка после одного цикла
Преобразователь
частоты автоматически останавливается после выполнения одного цикла.
Для повторного запуска цикла требуется снова подать команду на пуск.
1: Функционирование с текущей скоростью после одного
цикла
После завершения одного цикла ПЛК преобразователь
частоты продолжит работу со скоростью и направлением последнего этапа.
2: Непрерывный цикл
После завершения всех
этапов одного цикла преобразователь частоты автоматически возвращается
к начальному этапу и начинает выполнение цикла заново.
Сохранение настроек ПЛК устанавливается отдельно в параметре FD.17:
0х: Сохранение настроек при отключении питания
ПЛК запоминает скорость, направление и длительность каждого этапа,
поэтому после отключения питания ПЧВ сможет продолжить работу, а не
начинать цикл заново.
х0: Сохранение настроек при останове
При
нажатии на кнопку преобразователь частоты останавливает двигатель
и запоминает на каком этапе остановился цикл ПЛК. После подачи команды
на пуск, цикл продолжится, а не начнется заново.
Параметры FD.18 – FD.49
FD.18
Длительность 0-го этапа работы
Значение
по умолчанию
0.0 с (ч)
Диапазон значений
0.0 с (ч) – 6553.5 с (ч)
В параметрах FD.18 – FD.49 для каждого этапа задаются продолжительность
работы, а также время разгона и торможения.
Для каждого этапа можно выбрать одну из четырех доступных групп
времени разгона и торможения (значения от 0 до 3):
0: Группа 1 – время разгона 1 задается в параметре F0.18, время торможения
1 – в параметре F0.19;
1: Группа 2 – время разгона 2 задается в параметре F8.03, время торможения
2 – в параметре F8.04;
2: Группа 3 – время разгона 3 задается в параметре F8.05, время торможения
3 – в параметре F8.06;
3: Группа 4 – время разгона 4 задается в параметре F8.07, время торможения
4 – в параметре F8.08.
Параметр FD.50
FD.50
Единицы измерения времени работы ПЛК
Значение
по умолчанию
0
Диапазон значений
0
Секунды
1
Часы
2
Минуты
В данном параметре задаются единицы измерения времени длительности
этапов цикла, выполняемых ПЛК (см. группу параметров FD.18 – FD.49).
Данный параметр используется для выбора одного из шести источников,
определяющего скорость начального этапа. Начальный этап цикла ПЛК
будет выполняться со скоростью, задаваемой выбранным источником.
Группа FE: Пароль и параметры пожарного режима
Параметр FE.00
FE.00
Пользовательский пароль
Значение
по умолчанию
0
Диапазон значений
0 – 65535
Параметр FE.00 служит для установки пароля с
целью защиты от непреднамеренного редактирования значений параметров
ПЧВ. Чтобы установить пароль, в данный параметр требуется записать
его значение. После установки пароля, для того, чтобы войти из начального
экрана в меню параметров, потребуется ввести пароль (значение, заданное
в параметре FE.00).
Для отключения парольной защиты и входа в меню параметров без ввода
пароля, в параметре FE.00 необходимо задать
значение 0.
Параметр FE.01
FE.01
Количество отображаемых записей о неисправностях
Значение
по умолчанию
5
Диапазон значений
0 – 15
В преобразователе частоты ведется архив неисправностей. Архив неисправностей
разбит на группы записей о неисправностях: в каждой группе содержится
информация о типе последней неисправности, времени аварии и сопутствующих
им значениях параметров ПЧВ.
В параметре FE.01 задается количество
групп записей о неисправностях, отображаемых в меню ПЧВ.
По умолчанию, количество отображаемых групп записей о неисправностях
равно пяти, поэтому в меню параметров доступно пять групп записей
о неисправностях: E0, E1, E2, E3, E4. Если в параметре FE.01 задать значение 15, то для отображения в меню
будет доступно 15 таких групп (соответственно с E0 по EE).
Группы записей о неисправностях по структуре идентичны друг другу
(см. описание группы E0, приведенное в руководстве по эксплуатации
на прибор).
Параметры FE.07 и FE.08 служат для выбора соответственно основного и
резервного источников задания частоты при работе ПЧВ в пожарном режиме.
Параметр FE.09
FE.09
Направление вращения в пожарном режиме
Значение по умолчанию
0
Диапазон значений
0
В том же направлении
1
Реверс
В параметре FE.09 задается направление
вращения при работе ПЧВ в пожарном режиме.
FE.10
Выбор типа пожарного режима
Значение
по умолчанию
0
Диапазон значений
0
Тип 1
1
Тип 2
В параметре FE.10 задается тип пожарного
режима работы ПЧВ :
0: Тип 1
ПЧВ управляется установленными
значениями аварийной группы параметров (если в этот момент он находится
в отключенном состоянии, произойдет автоматический запуск). ПЧВ игнорирует
команды запуска и останова от других устройств и панели управления,
вызванные некритическими аварийными сигналами, сохраняя при этом реакцию
на ключевые аварии.
1: Тип 2
ПЧВ управляется установленными
значениями аварийной группы параметров (если в этот момент он находится
в отключенном состоянии, произойдет автоматический запуск). ПЧВ игнорирует
все аварийные сигналы и сигнал останова с панели управления, обеспечивая
непрерывную работу подключенного устройства.
Параметр FE.11
FE.11
Количество попыток перезапуска
Значение
по умолчанию
5
Диапазон значений
0 – 99
В параметре FE.11 задается количество
попыток перезапуска после возникновения ошибки.
Параметр FE.12
FE.12
Время ожидания перезапуска
Значение
по умолчанию
10 с
Диапазон значений
0 – 6500 с
В параметре FE.12 задается время,
через которое произойдет попытка перезапуска после возникновения ошибки.
Параметр
FE.13
Время повторного запуска мониторинга ошибок
Значение по умолчанию
30 с
Диапазон значений
0 – 6500 с
В параметре FE.13 задается время
повторного запуска мониторинга ошибок. Если по истечении данного времени
с момента последнего перезапуска неисправность не была обнаружена,
перезапуск считается успешным.
Предупреждающие сообщения
В данном руководстве применяются следующие предупреждения:
Опасность
Ключевое слово ОПАСНОСТЬ сообщает о непосредственной
угрозе опасной ситуации, которая приведет к смерти или серьезной
травме, если ее не предотвратить.
Внимание
Ключевое слово ВНИМАНИЕ сообщает о потенциально
опасной ситуации, которая может привести к небольшим травмам.
Предупреждение
Ключевое слово ПРЕДУПРЕЖДЕНИЕ сообщает о потенциально опасной ситуации , которая может привести к повреждению
имущества.
Примечание
Ключевое слово ПРИМЕЧАНИЕ обращает внимание
на полезные советы и рекомендации, а также информацию для эффективной
и безаварийной работы оборудования.
Ограничение ответственности
Ни при
каких обстоятельствах ООО «Производственное
Объединение ОВЕН» и
его контрагенты не будут нести юридическую ответственность и не будут
признавать за собой какие-либо обязательства в связи с любым ущербом,
возникшим в результате установки или использования прибора с нарушением
действующей нормативно-технической документации.