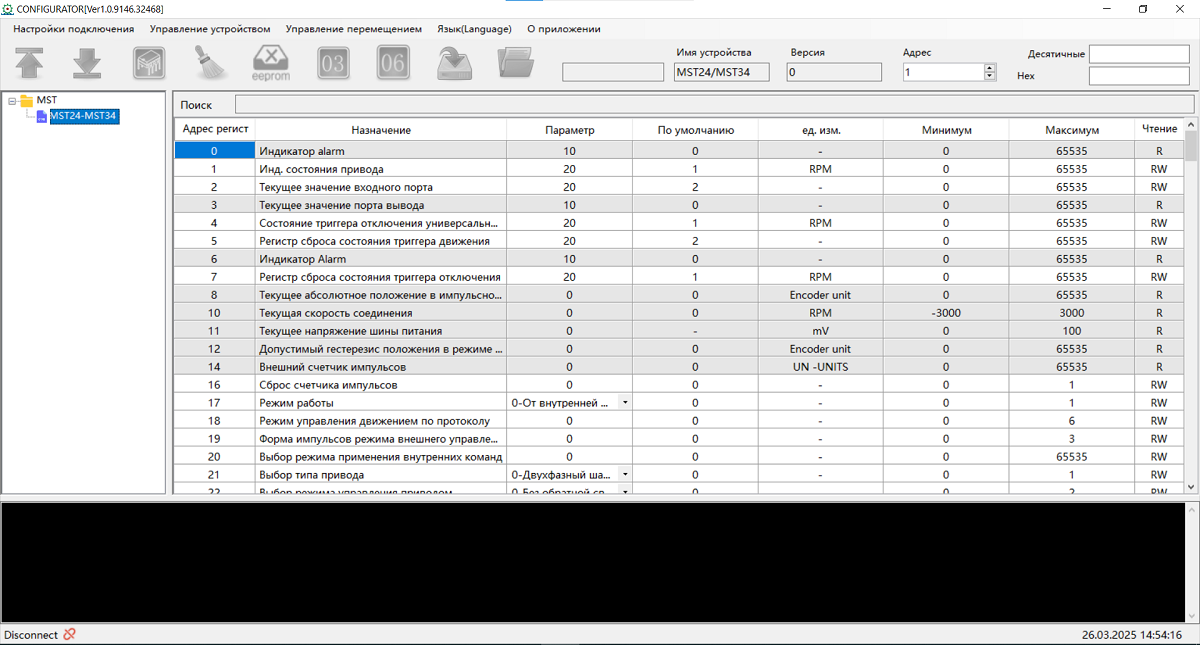
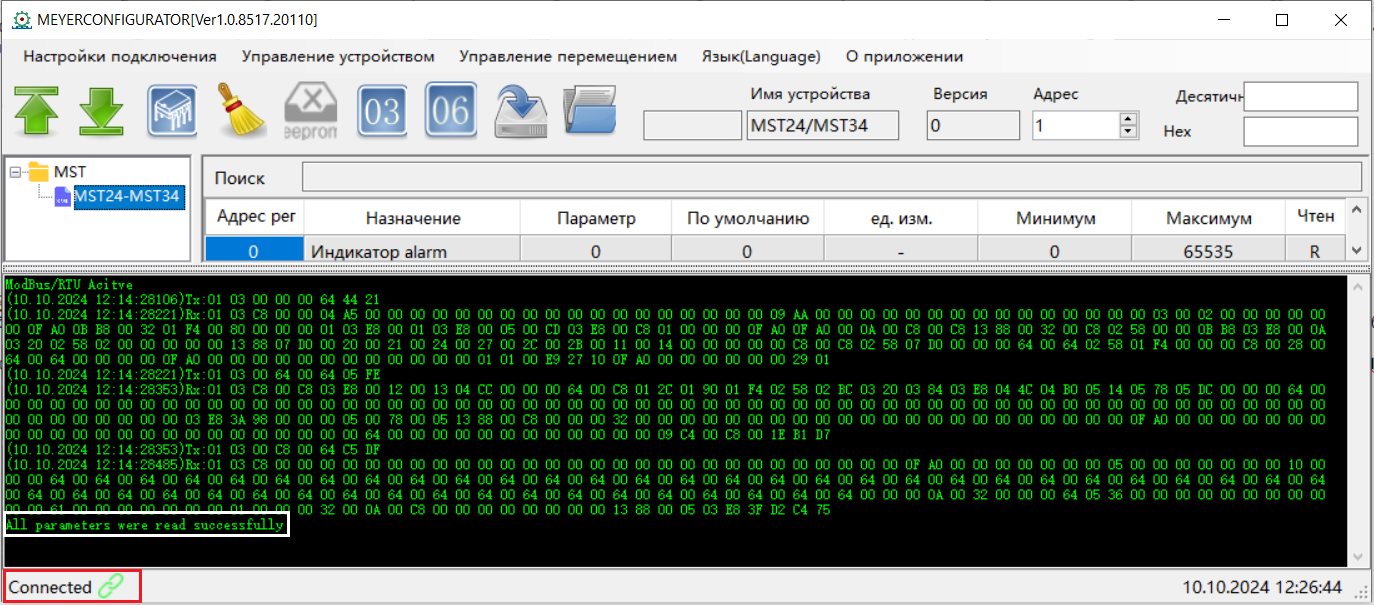
Регистры ошибок и состояния |
0 | Регистр ошибок драйвера | R | INT16 | Двоичный код (0..511) |
1 | Регистр состояния драйвера | R | INT16 | Двоичный код (0..4096) |
Регистры состояния дискретных входов
и выходов |
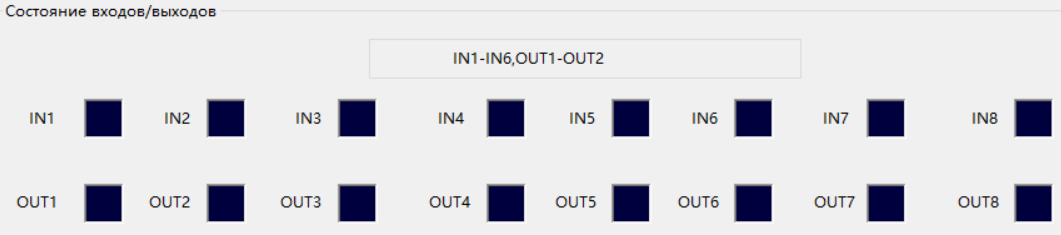
2 | Текущее состояние дискретных входов
IN1...IN6 | R | INT16 | Двоичный код (0...63) |
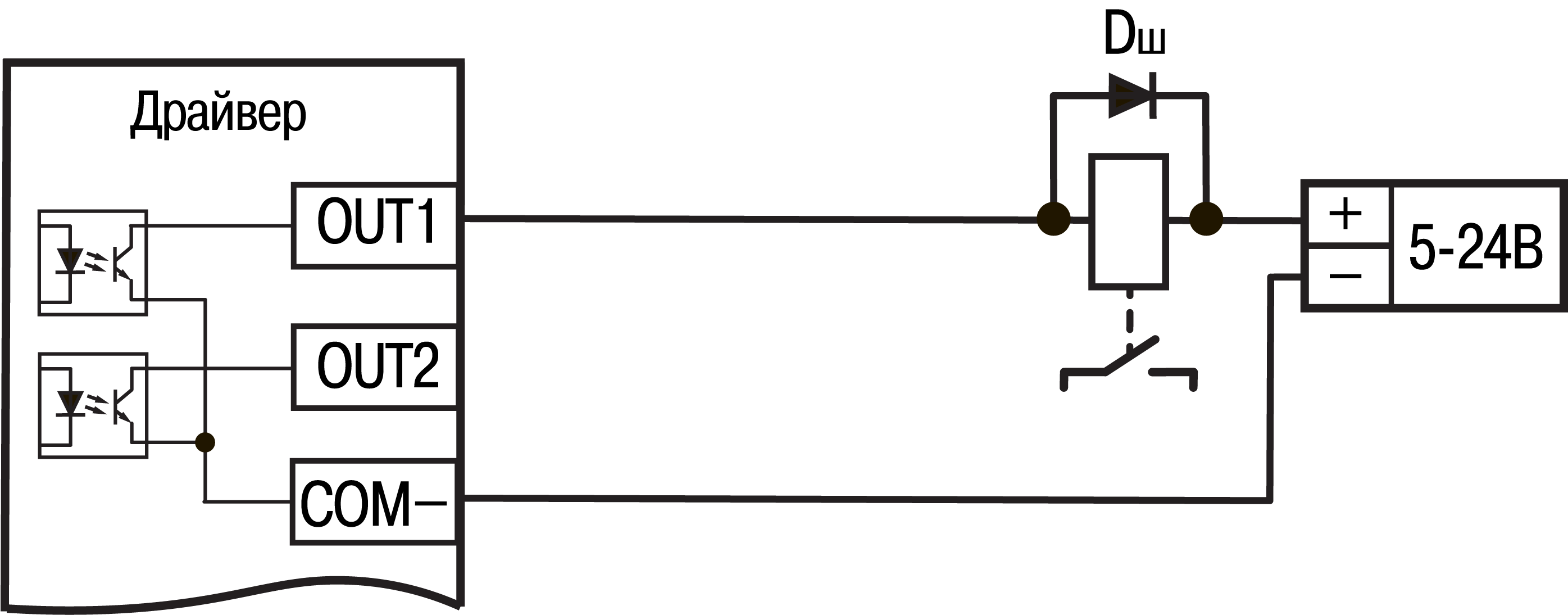
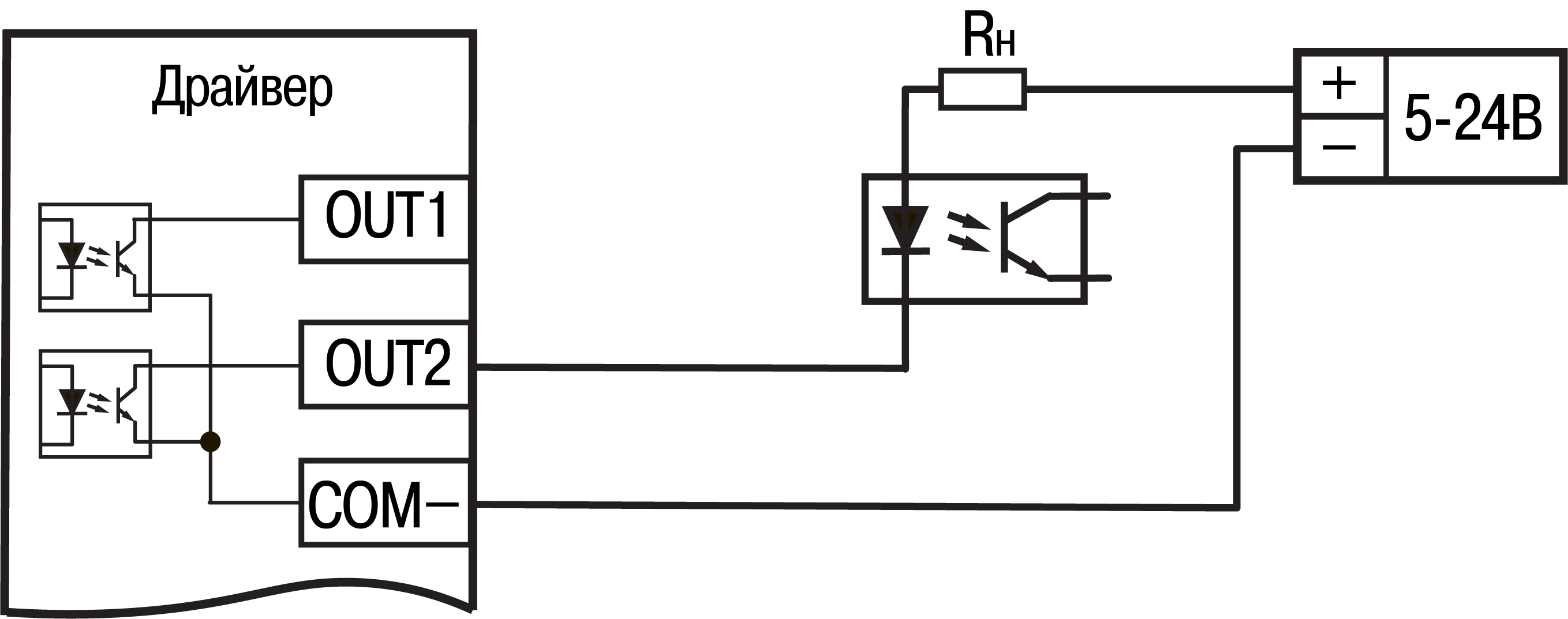
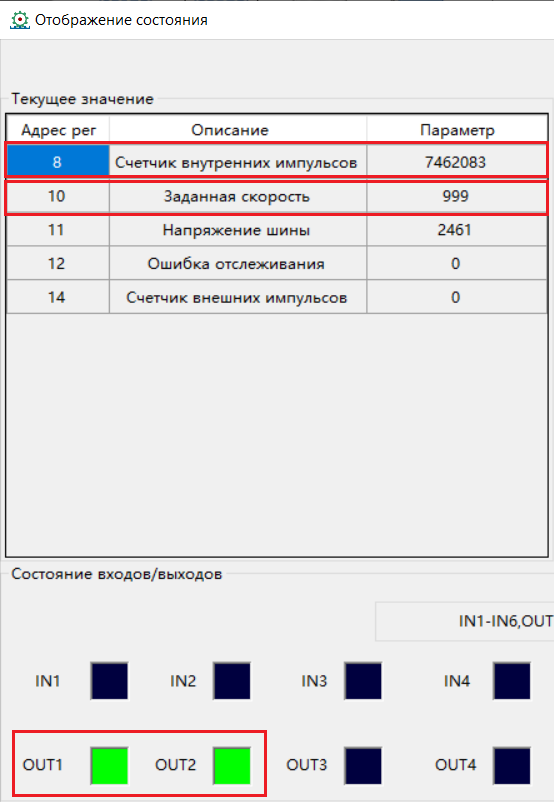
3 | Текущее состояние дискретных выходов
OUT1, OUT2 | R | INT16 | Двоичный код (0...3) |
4 | Регистр изменения состояния дискретных
входов IN1...IN6 с низкого логического уровня на высокий | R | INT16 | Двоичный код (0...63) |
5 | Регистр изменения состояния дискретных
входов IN1...IN6 с высокого логического уровня на низкий | R | INT16 | Двоичный код (0...63) |
6 | Сброс флагов изменения состояния дискретных
входов IN1...IN6 с низкого логического уровня на высокий | R | INT16 | Двоичный код (0...63) |
7 | Сброс флагов изменения состояния дискретных
входов IN1...IN6 с высокого логического уровня на низкий | R | INT16 | Двоичный код (0...63) |
Регистры текущих значений параметров
позиционирования и скорости двигателя |
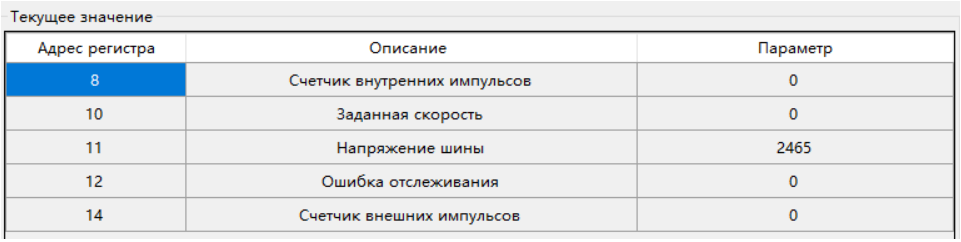
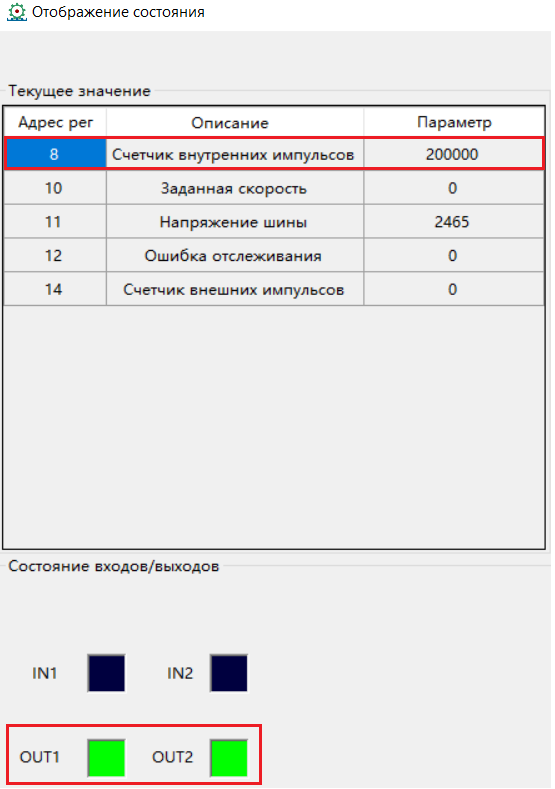
8 | Текущее абсолютное значение позиции
двигателя (16 младших бит) | R | INT16 | INT32 | Кол-во шагов (0...65535) |
9 | Текущее абсолютное значение позиции
двигателя (16 старших бит) | R | INT16 | Кол-во шагов (65536...16777216) |
10 | Заданная скорость вращения | R | INT16 | Об/мин (0...3000) |
11 | Текущее значение напряжения питания
драйвера | R | INT16 | мВ (0...100000) |
12 | Текущее значение рассогласования отслеживания
позиции двигателя (16 младших бит) | R | INT16 | INT32 | Кол-во меток энкодера (0...65535) |
13 | Текущее значение рассогласования отслеживания
позиции двигателя (16 старших бит) | R | INT16 | Кол-во меток энкодера (65536...16777216) |
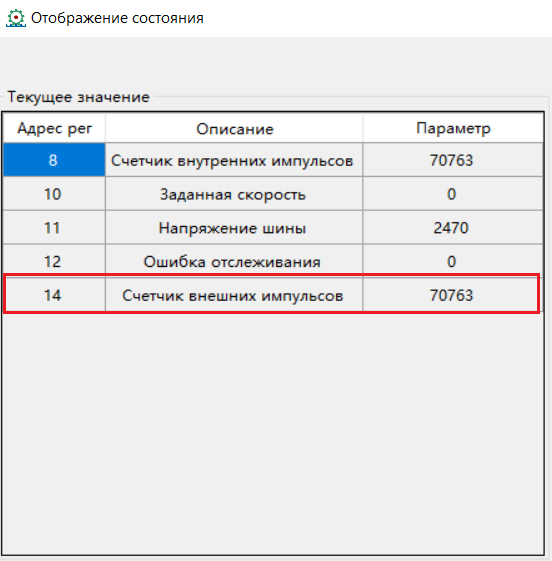
14 | Счетчик внешних импульсов (16
младших бит) | R | INT16 | INT32 | Кол-во импульсов (0...65535) |
15 | Счетчик внешних импульсов (16
старших бит) | R | INT16 | Кол-во импульсов (65536...16777216) |
16 | Сброс счетчика внешних импульсов | R/W | INT16 | – (0...1) |
Регистры параметров режимов работы
и управления драйвера |
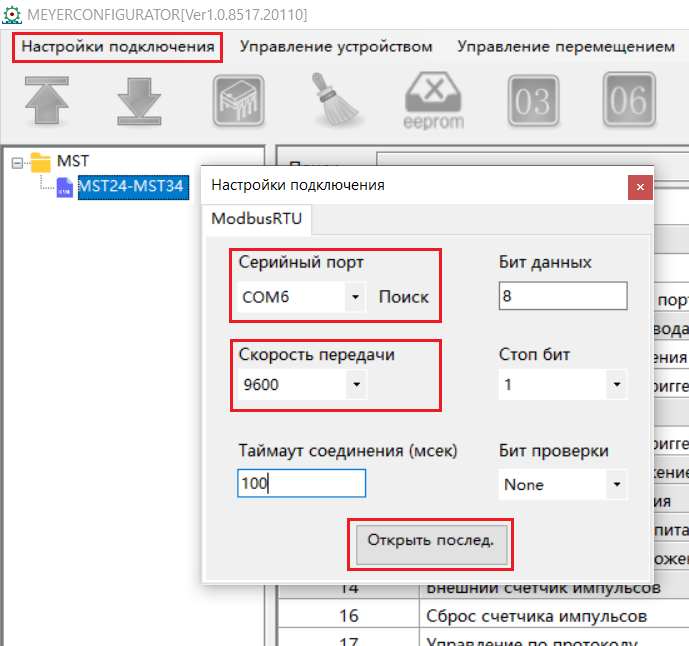
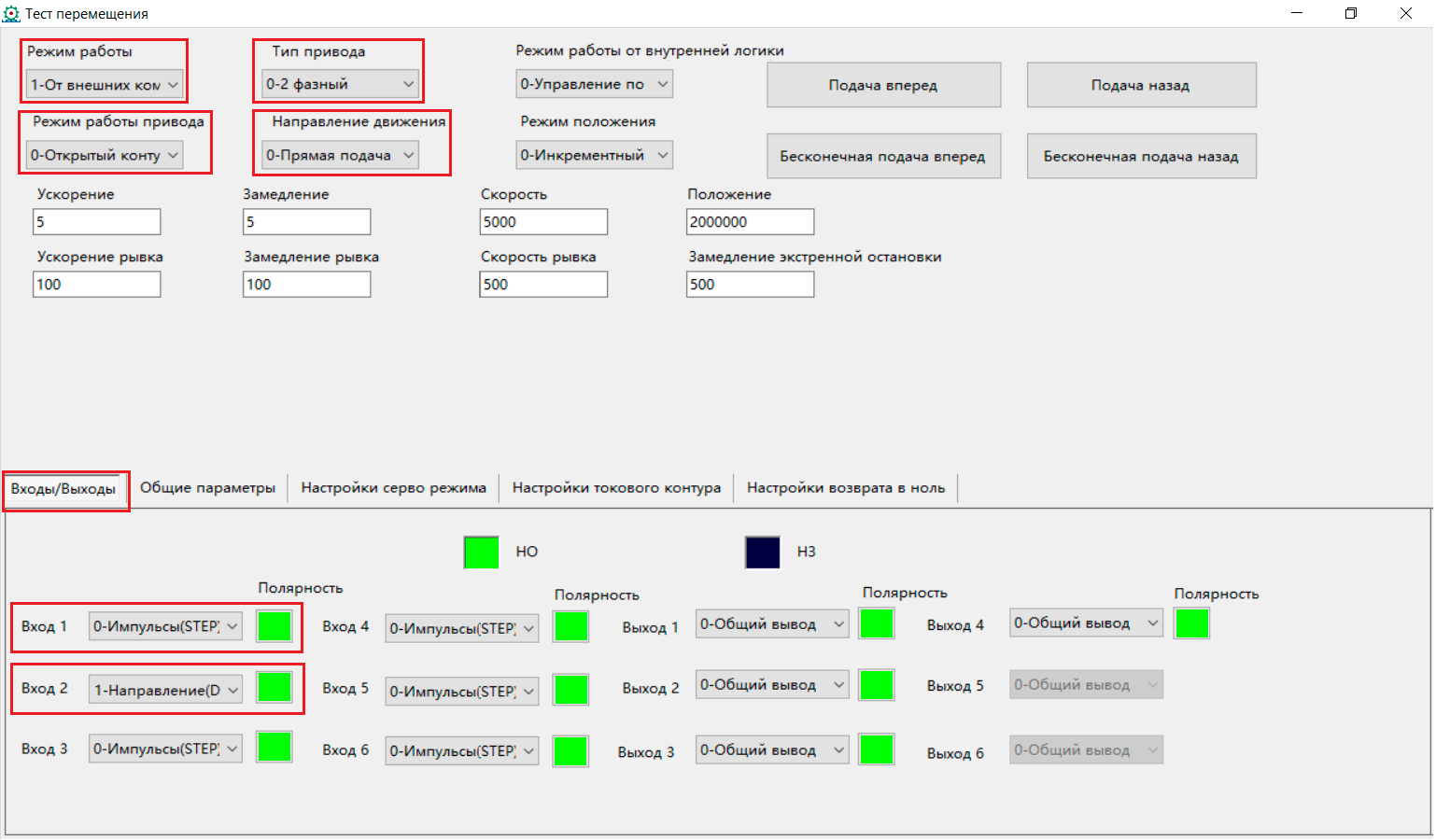
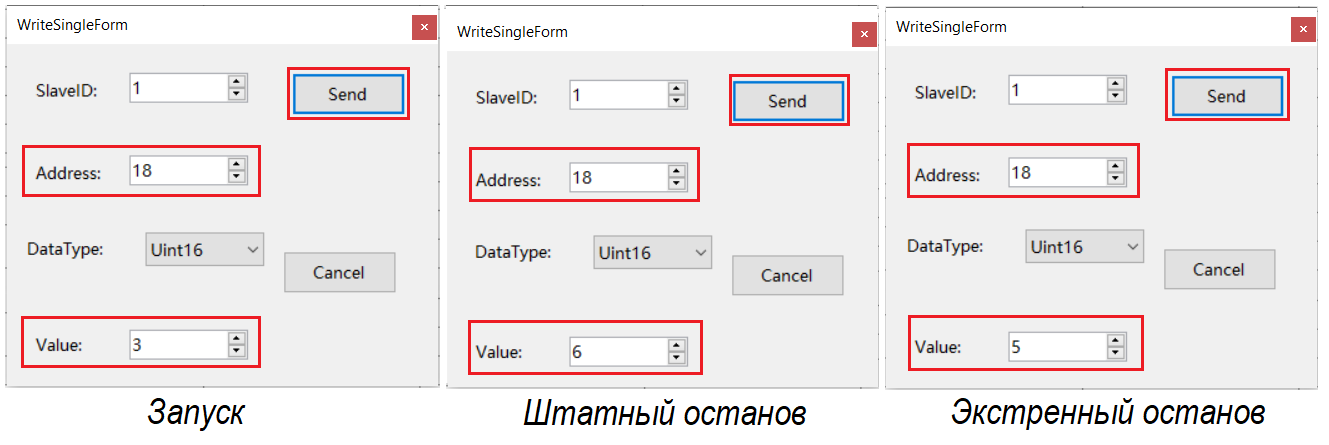
17 | Режим работы драйвера | R/W | INT16 | – (0...1) |
18 | Функции управления в режиме работы
от внутренней логики | R/W | INT16 | – (0...6) |
 Примечание ПримечаниеФункции управления, выбираемые в данном регистре, будут
выполняться только при условии, если в регистре с адресом 20 задано
значение 0. |
19 | Назначение функций для дискретных
входов IN1, IN2 в режиме работы от внешних команд | R/W | INT16 | – (0...2) |
20 | Типовые функции управления в режиме
работы от внутренней логики | R/W | INT16 | – (0...6) |
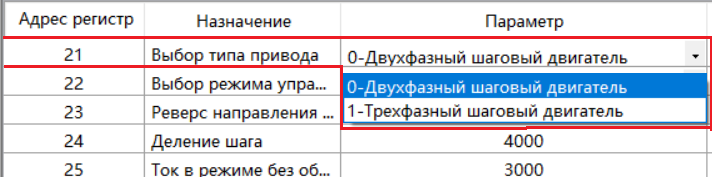
21 | Выбор типа двигателя | R/W | INT16 | – (0...1) |
22 | Выбор типа контура управления двигателем | R/W | INT16 | – (0...2) |
23 | Инверсия направления вращения | R/W | INT16 | – (0...1) |
284 | Верхний предел значения тока | R/W | INT16 | мА (0...6000) |
Регистры параметров работы в разомкнутом
контуре управления |
24 | Настройка микрошага | R/W | INT16 | Кол-во импульсов на оборот (200...65535) |
25 | Ток вращения вала двигателя при работе
в разомкнутом контуре | R/W | INT16 | мА (0...6000) |
26 | Ток в режиме ожидания при работе в
разомкнутом контуре | R/W | INT16 | % (0...100) |
27 | Время до входа в режим ожидания при
работе в разомкнутом контуре | R/W | INT16 | мс (10...65535) |
28 | Настройка фильтра управляющих импульсов | R/W | INT16 | – (1...512) |
29 | Текущее положение энкодера | R | INT16 | Кол-во импульсов (–) |
Регистры параметров двигателя и
контура управления тока |
30 | Включение/отключение функции PI | R/W | INT16 | – (0...1) |
31 | Измеренное значение сопротивления
обмотки двигателя | R | INT16 | мОм (100...65535) |
32 | Измеренное значение индуктивности
обмотки двигателя | R | INT16 | мГн (1...65535) |
33 | Значение сопротивления обмотки двигателя,
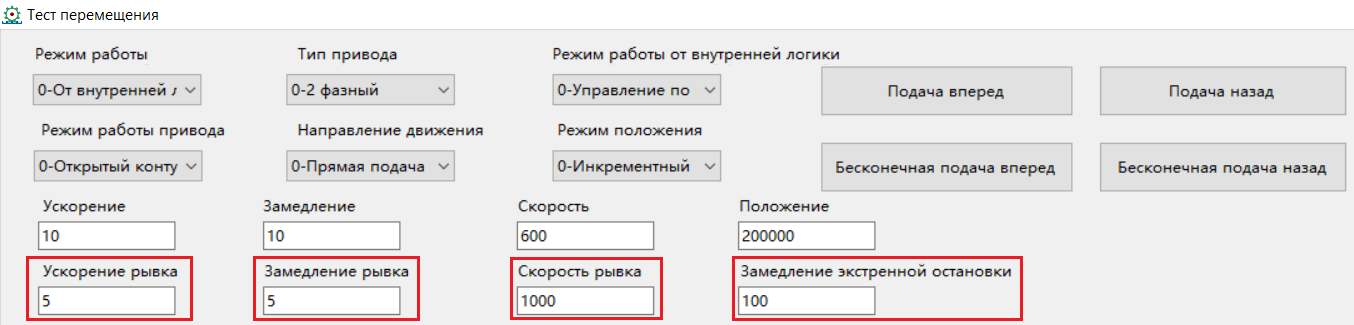
заданное пользователем | R/W | INT16 | мОм (100...10000) |
34 | Значение индуктивности обмотки двигателя,
заданное пользователем | R/W | INT16 | мГн (1...10) |
35 | Постоянная момента двигателя | R/W | INT16 | мН∙м/А (0...1000) |
36 | Коэффициент Kp ПИ-регулятора | R/W | INT16 | – (200...10000) |
37 | Коэффициент KI ПИ-регулятора | R/W | INT16 | – (0...2000) |
38 | Коэффициент KC ПИ-регулятора | R/W | INT16 | – (0...1024) |
39 | Запуск проверки контура управления
тока | R/W | INT16 | 0 (0...1) |
Регистры параметров работы в замкнутом
контуре управления |
40 | Разрешение энкодера | R/W | INT16 | Кол-во меток энкодера (разрешение) (256...65535) |
41 | Гистерезис ошибки позиционирования | R/W | INT16 | Кол-во меток энкодера (разрешение) (100...65535) |
42 | Точность позиционирования | R/W | INT16 | Кол-во меток энкодера (разрешение) (1...65535) |
43 | Время удержания в достигнутой позиции | R/W | INT16 | – (1...65535) |
44 | Время задержки завершения позиционирования | R/W | INT16 | – (1...65535) |
45 | Максимально допустимый ток при работе
в замкнутом контуре | R/W | INT16 | мА (0...5000) |
46 | Ток в режиме останова или ожидания
при работе в замкнутом контуре | R/W | INT16 | % (0...100) |
47 | Частота среза первичного фильтра контура
скорости | R/W | INT16 | Гц (10...5000) |
48 | Частота среза вторичного фильтра контура
скорости | R/W | INT16 | Гц (10...5000) |
Регистры параметров серворежимов
1 и 2 при работе в замкнутом контуре управления |
49 | Серворежим 1: коэффициент подавления
резонанса в контуре скорости | R/W | INT16 | – (0...500) |
50 | Серворежим 2: пропорциональный коэффициент
усиления в контуре обратной связи по позиционированию | R/W | INT16 | – (0...65535) |
51 | Серворежим 2: интегральный коэффициент
усиления в контуре обратной связи по позиционированию | R/W | INT16 | – (0...65535) |
52 | Серворежим 2: коэффициент демпфирования
1 в контуре обратной связи по скорости | R/W | INT16 | – (0...65535) |
53 | Серворежим 2: коэффициент демпфирования
2 в контуре обратной связи по скорости | R/W | INT16 | – (0...65535) |
54 | Серворежим 2: коэффициент прямой связи
в контуре прямой связи по скорости | R/W | INT16 | – (0...65535) |
55 | Серворежим 2: коэффициент компенсации
гравитации | R/W | INT16 | – (0...1024) |
56 | Серворежим 2: коэффициент усиления
по ускорению | R/W | INT16 | – (0...65535) |
57 | Серворежим 2: коэффициент прямой связи
в контуре прямой связи по ускорению | R/W | INT16 | – (0...65535) |
58 | Серворежим 2: выходной фильтр по ускорению | R/W | INT16 | Гц (10...5000) |
59 | Серворежим 2: фильтр прямой связи
по ускорению | R/W | INT16 | Гц (10...5000) |
Регистры режимов работы дискретных
входов и выходов |
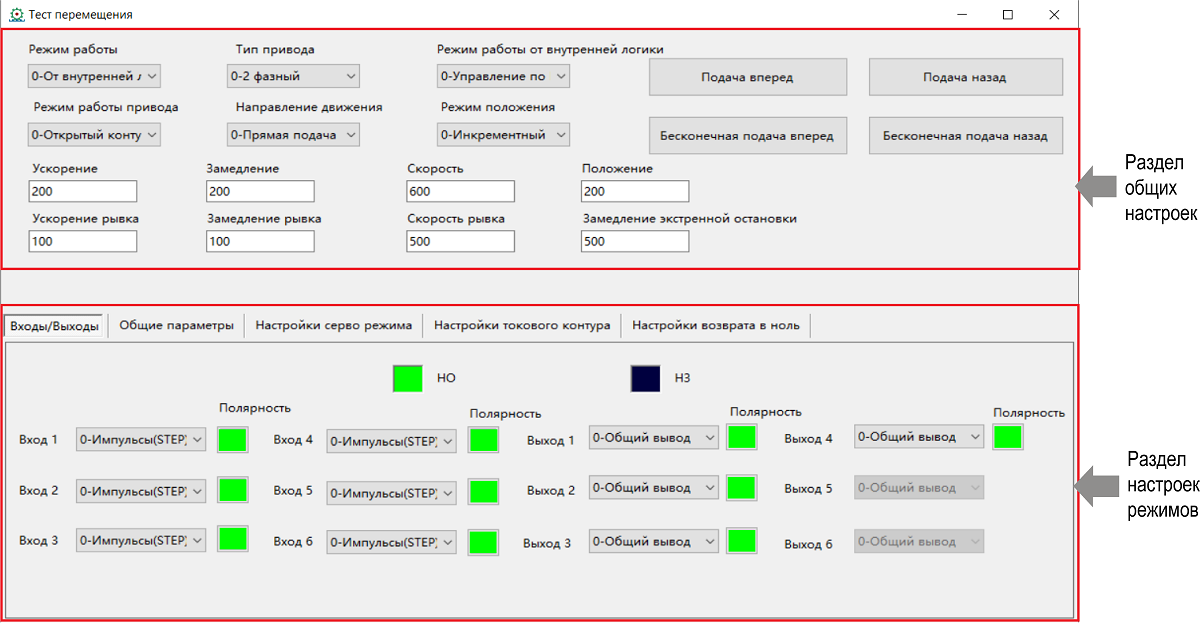
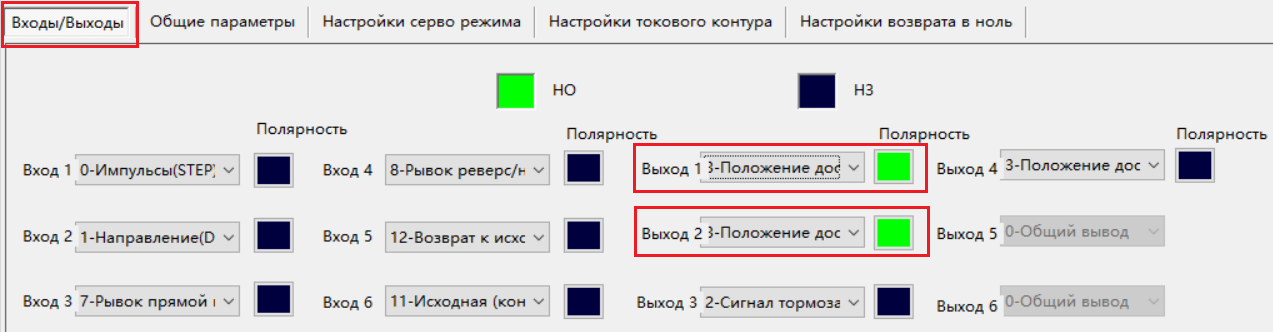
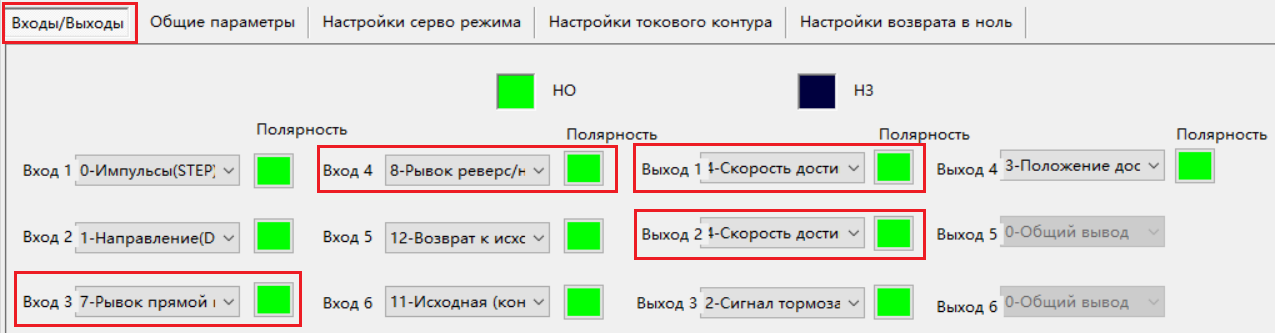
60 | Регистр режимов работы дискретного
входа IN1 | R/W | INT16 | Двоичный код (0...63) |
61 | Регистр режимов работы дискретного
входа IN2 | R/W | INT16 | Двоичный код (0...63) |
62 | Регистр режимов работы дискретного
входа IN3 | R/W | INT16 | Двоичный код (0...63) |
63 | Регистр режимов работы дискретного
входа IN4 | R/W | INT16 | Двоичный код (0...63) |
64 | Регистр режимов работы дискретного
входа IN5 | R/W | INT16 | Двоичный код (0...63) |
65 | Регистр режимов работы дискретного
входа IN6 | R/W | INT16 | Двоичный код (0...63) |
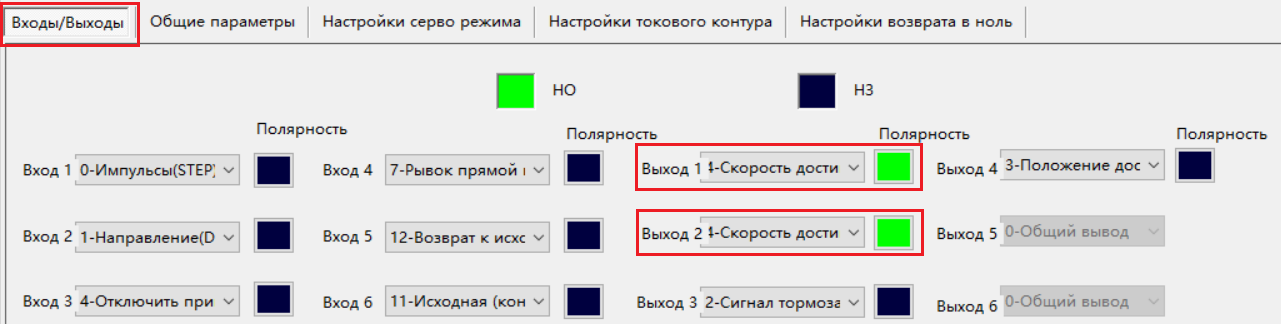
66 | Регистр режимов работы дискретного
выхода OUT1 | R/W | INT16 | Двоичный код (0...27) |
67 | Регистр режимов работы дискретного
выхода OUT2 | R/W | INT16 | Двоичный код (0...27) |
68 | Регистр включения/отключения дискретных
выходов OUT1, OUT2 | R/W | INT16 | Двоичный код (0...3) |
69 | Регистр (бит) состояния функции, назначенной
для дискретного входа | R | INT16 | Двоичный код (0...1) |
104 | Регистр (бит) состояния функции, назначенной
для дискретного выхода | R | INT16 | Двоичный код (0...1) |
Регистры параметров режима перехода
на заданную позицию |
70 | Регистр заданного значения ускорения
вращения | R/W | INT16 | об/с2 (10...1000) |
71 | Регистр заданного значения замедления
вращения | R/W | INT16 | об/с2 (10...1000) |
72 | Регистр заданного значения максимальной
скорости вращения | R/W | INT16 | об/мин (0...3000) |
73 | Регистр заданной позиции (16
младших бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
74 | Регистр заданной позиции (16
старших бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
Регистры параметров режима постоянного
вращения с заданной скоростью |
75 | Регистр заданного значения ускорения
вращения (режим постоянного вращения) | R/W | INT16 | об/с2 (10...1000) |
76 | Регистр заданного значения замедления
вращения (режим постоянного вращения) | R/W | INT16 | об/с2 (10...1000) |
77 | Регистр заданного значения максимальной
скорости вращения (режим постоянного вращения) | R/W | INT16 | об/мин (0...3000) |
78 | Регистр заданного значения замедления
вращения при экстренном останове | R/W | INT16 | об/с2 (10...1000) |
Регистры режима работы от внутренней
логики |
84 | Регистр выбора режима вращения (инкрементальный
/ абсолютный) | R/W | INT16 | Двоичный код (0...1) |
85 | Регистр сброса счетчика импульсов
внутренней логики | R/W | INT16 | Двоичный код (0...1) |
88 | Регистр отключения ошибки отслеживания
положения | R/W | INT16 | Двоичный код (0...1) |
89 | Серворежим 1: интегральный коэффициент
усиления | R/W | INT16 | – (0...500) |
Регистры заводских настроек |
90 | Регистр сохранения текущих значений
параметров | R/W | INT16 | Двоичный код (0...1) |
91 | Регистр сброса параметров на заводские
значения | R/W | INT16 | Двоичный код (0...1) |
92 | – | – | – | – |
93 | Обозначение драйвера | R | INT16 | – |
94 | Версия драйвера | R | INT16 | – |
95 | Нестандартный номер драйвера | R | INT16 | – |
Регистры параметров скорости и
позиции при многоступенчатом управлении скоростью и позиционировании |
100 | Время переключения между ступенями
скоростей и позициями при многоступенчатом управлении скоростью и
позиционировании | R/W | INT16 | – (0...65535) |
101 | Значение тестового тока | R/W | INT16 | мА (0...3000) |
105 | Значение скорости для ступени 1 | R/W | INT16 | об/мин (0...3000) |
106 | Значение скорости для ступени 2 | R/W | INT16 | об/мин (0...3000) |
107 | Значение скорости для ступени 3 | R/W | INT16 | об/мин (0...3000) |
108 | Значение скорости для ступени 4 | R/W | INT16 | об/мин (0...3000) |
109 | Значение скорости для ступени 5 | R/W | INT16 | об/мин (0...3000) |
110 | Значение скорости для ступени 6 | R/W | INT16 | об/мин (0...3000) |
111 | Значение скорости для ступени 7 | R/W | INT16 | об/мин (0...3000) |
112 | Значение скорости для ступени 8 | R/W | INT16 | об/мин (0...3000) |
113 | Значение скорости для ступени 9 | R/W | INT16 | об/мин (0...3000) |
114 | Значение скорости для ступени 10 | R/W | INT16 | об/мин (0...3000) |
115 | Значение скорости для ступени 11 | R/W | INT16 | об/мин (0...3000) |
116 | Значение скорости для ступени 12 | R/W | INT16 | об/мин (0...3000) |
117 | Значение скорости для ступени 13 | R/W | INT16 | об/мин (0...3000) |
118 | Значение скорости для ступени 14 | R/W | INT16 | об/мин (0...3000) |
119 | Значение скорости для ступени 15 | R/W | INT16 | об/мин (0...3000) |
120 | Значение скорости для ступени 16 | R/W | INT16 | об/мин (0...3000) |
121 | Текущее выбранное значение позиции | R | INT16 | 0...15 |
125 | Значение позиции 1 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
126 | Значение позиции 1 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
127 | Значение позиции 2 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
128 | Значение позиции 2 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
129 | Значение позиции 3 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
130 | Значение позиции 3 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
131 | Значение позиции 4 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
132 | Значение позиции 4 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
133 | Значение позиции 5 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
134 | Значение позиции 5 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
135 | Значение позиции 6 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
136 | Значение позиции 6 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
137 | Значение позиции 7 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
138 | Значение позиции 7 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
139 | Значение позиции 8 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
140 | Значение позиции 8 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
141 | Значение позиции 9 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
142 | Значение позиции 9 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
143 | Значение позиции 10 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
144 | Значение позиции 10 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
145 | Значение позиции 11 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
146 | Значение позиции 11 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
147 | Значение позиции 12 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
148 | Значение позиции 12 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
149 | Значение позиции 13 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
150 | Значение позиции 13 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
151 | Значение позиции 14 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
152 | Значение позиции 14 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
153 | Значение позиции 15 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
154 | Значение позиции 15 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
155 | Значение позиции 16 (16 младших
бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
156 | Значение позиции 16 (16 старших
бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
Регистры параметров режима управления
моментом вала двигателя |
157 | Пропорциональный коэффициент усиления
контура скорости в режиме управления моментом вала двигателя | R/W | INT16 | – (1...65535) |
158 | Интегральный коэффициент усиления
контура скорости в режиме управления моментом вала двигателя | R/W | INT16 | – (0...65535) |
165 | Действующий крутящий момент в режиме
управления моментом вала двигателя | R/W | INT16 | мА (10...5000) |
219 | Время удержания крутящего момента
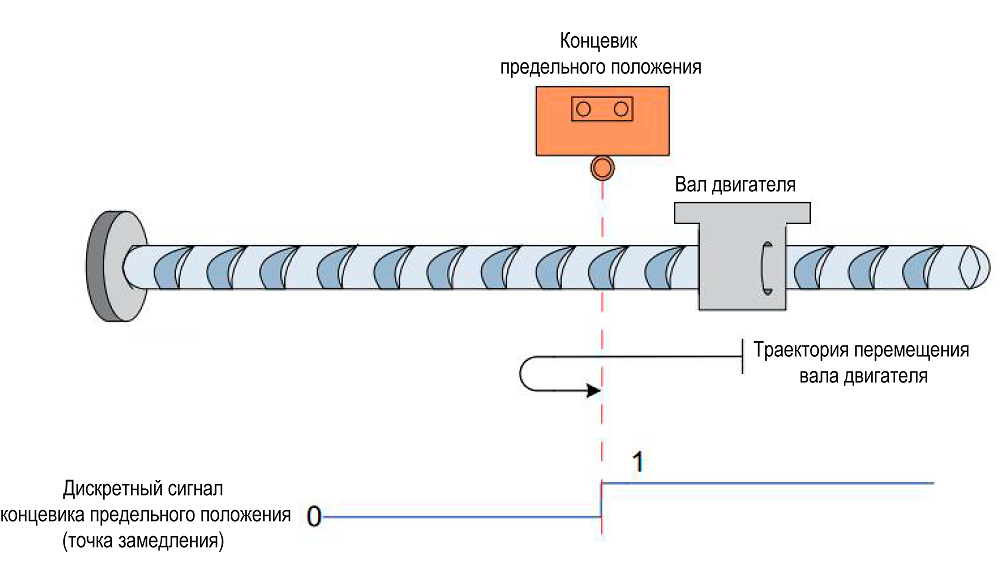
вала после останова двигателя в режиме управления моментом вала двигателя | R/W | INT16 | мс (0...65535) |
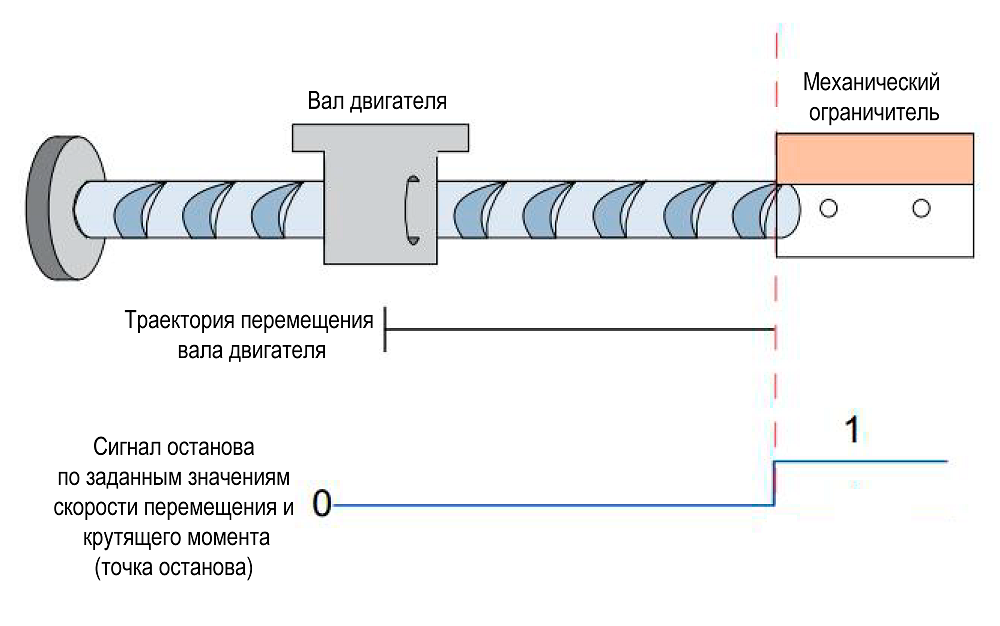
220 | Контроль состояния вала двигателя
после истечения времени удержания крутящего момента в режиме управления
моментом вала двигателя | R/W | INT16 | Двоичный код (0...1) |
Регистры параметров многоступенчатого
позиционирования |
221 | Режимы многоступенчатого позиционирования | R/W | INT16 | – (0...2) |
222 | Количество отрабатываемых позиций
в режиме многоступенчатого позиционирования | R/W | INT16 | – (1...16) |
223 | Единица времени ожидания после достижения
позиций | R/W | INT16 | Двоичный код (0...1) |
224 | Максимальная скорость при перемещении
к позиции 1 | R/W | INT16 | об/мин (0...3000) |
225 | Ускорение и замедление при перемещении
к позиции 1 | R/W | INT16 | об/с2 (1...2000) |
226 | Время ожидания после достижения позиции
1 | R/W | INT16 | – (0...65535) |
227 | Максимальная скорость при перемещении
к позиции 2 | R/W | INT16 | об/мин (0...3000) |
228 | Ускорение и замедление при перемещении
к позиции 2 | R/W | INT16 | об/с2 (1...2000) |
229 | Время ожидания после достижения позиции
2 | R/W | INT16 | – (0...65535) |
230 | Максимальная скорость при перемещении
к позиции 3 | R/W | INT16 | об/мин (0...3000) |
231 | Ускорение и замедление при перемещении
к позиции 3 | R/W | INT16 | об/с2 (1...2000) |
232 | Время ожидания после достижения позиции
3 | R/W | INT16 | – (0...65535) |
233 | Максимальная скорость при перемещении
к позиции 4 | R/W | INT16 | об/мин (0...3000) |
234 | Ускорение и замедление при перемещении
к позиции 4 | R/W | INT16 | об/с2 (1...2000) |
235 | Время ожидания после достижения позиции
4 | R/W | INT16 | – (0...65535) |
236 | Максимальная скорость при перемещении
к позиции 5 | R/W | INT16 | об/мин (0...3000) |
237 | Ускорение и замедление при перемещении
к позиции 5 | R/W | INT16 | об/с2 (1...2000) |
238 | Время ожидания после достижения позиции
5 | R/W | INT16 | – (0...65535) |
239 | Максимальная скорость при перемещении
к позиции 6 | R/W | INT16 | об/мин (0...3000) |
240 | Ускорение и замедление при перемещении
к позиции 6 | R/W | INT16 | об/с2 (1...2000) |
241 | Время ожидания после достижения позиции
6 | R/W | INT16 | – (0...65535) |
242 | Максимальная скорость при перемещении
к позиции 7 | R/W | INT16 | об/мин (0...3000) |
243 | Ускорение и замедление при перемещении
к позиции 7 | R/W | INT16 | об/с2 (1...2000) |
244 | Время ожидания после достижения позиции
7 | R/W | INT16 | – (0...65535) |
245 | Максимальная скорость при перемещении
к позиции 8 | R/W | INT16 | об/мин (0...3000) |
246 | Ускорение и замедление при перемещении
к позиции 8 | R/W | INT16 | об/с2 (1...2000) |
247 | Время ожидания после достижения позиции
8 | R/W | INT16 | – (0...65535) |
248 | Максимальная скорость при перемещении
к позиции 9 | R/W | INT16 | об/мин (0...3000) |
249 | Ускорение и замедление при перемещении
к позиции 9 | R/W | INT16 | об/с2 (1...2000) |
250 | Время ожидания после достижения позиции
9 | R/W | INT16 | – (0...65535) |
251 | Максимальная скорость при перемещении
к позиции 10 | R/W | INT16 | об/мин (0...3000) |
252 | Ускорение и замедление при перемещении
к позиции 10 | R/W | INT16 | об/с2 (1...2000) |
250 | Время ожидания после достижения позиции
10 | R/W | INT16 | – (0...65535) |
254 | Максимальная скорость при перемещении
к позиции 11 | R/W | INT16 | об/мин (0...3000) |
255 | Ускорение и замедление при перемещении
к позиции 11 | R/W | INT16 | об/с2 (1...2000) |
256 | Время ожидания после достижения позиции
11 | R/W | INT16 | – (0...65535) |
257 | Максимальная скорость при перемещении
к позиции 12 | R/W | INT16 | об/мин (0...3000) |
258 | Ускорение и замедление при перемещении
к позиции 12 | R/W | INT16 | об/с2 (1...2000) |
259 | Время ожидания после достижения позиции
12 | R/W | INT16 | – (0...65535) |
260 | Максимальная скорость при перемещении
к позиции 13 | R/W | INT16 | об/мин (0...3000) |
261 | Ускорение и замедление при перемещении
к позиции 13 | R/W | INT16 | об/с2 (1...2000) |
262 | Время ожидания после достижения позиции
13 | R/W | INT16 | – (0...65535) |
263 | Максимальная скорость при перемещении
к позиции 14 | R/W | INT16 | об/мин (0...3000) |
264 | Ускорение и замедление при перемещении
к позиции 14 | R/W | INT16 | об/с2 (1...2000) |
265 | Время ожидания после достижения позиции
14 | R/W | INT16 | – (0...65535) |
266 | Максимальная скорость при перемещении
к позиции 15 | R/W | INT16 | об/мин (0...3000) |
267 | Ускорение и замедление при перемещении
к позиции 15 | R/W | INT16 | об/с2 (1...2000) |
268 | Время ожидания после достижения позиции
15 | R/W | INT16 | – (0...65535) |
269 | Максимальная скорость при перемещении
к позиции 16 | R/W | INT16 | об/мин (0...3000) |
270 | Ускорение и замедление при перемещении
к позиции 16 | R/W | INT16 | об/с2 (1...2000) |
271 | Время ожидания после достижения позиции
16 | R/W | INT16 | – (0...65535) |
Регистры счетчиков ошибок связи
по Modbus |
280 | Счетчик ошибок связи по Modbus | R | INT16 | – |
281 | Счетчик ошибок контрольной суммы фреймов
Modbus | R | INT16 | – |
282 | Счетчик ошибок чтения байтов Modbus | R | INT16 | – |
Регистры параметров возврата на
исходную позицию |
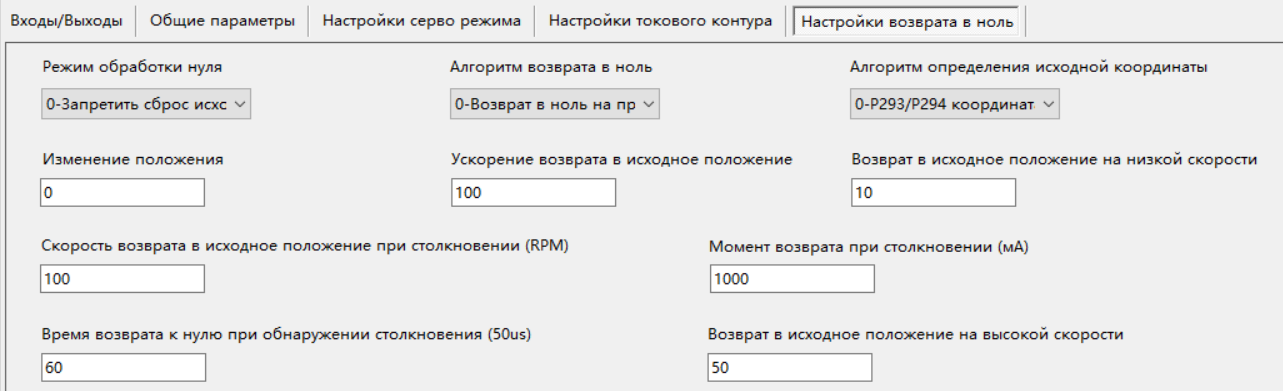
287 | Активация возврата на исходную позицию | R/W | INT16 | – (0...6) |
288 | Режимы возврата на исходную позицию | R/W | INT16 | – (0...5) |
289 | Скорость быстрого поиска сигнала исходной
позиции | R/W | INT16 | об/мин (0...1000) |
290 | Скорость медленного поиска сигнала
исходной позиции | R/W | INT16 | об/мин (0...1000) |
291 | Ускорение (в начале) и замедление
(в конце) быстрого поиска сигнала исходной позиции | R/W | INT16 | об/с2 (1...1000) |
293 | Смещение исходной позиции (16
младших бит) | R/W | INT16 | INT32 | Кол-во шагов (0...65535) |
294 | Смещение исходной позиции (16
старших бит) | R/W | INT16 | Кол-во шагов (65536...16777216
шагов) |
295 | Режим обработки параметра смещения исходной
позиции и сигнала концевика предельного положения | R/W | INT16 | – (0...3) |
296 | Время определения достижения позиции
механического ограничителя | R/W | INT16 | – (1000...65535) |
297 | Порог значения скорости при достижении
позиции механического ограничителя | R/W | INT16 | об/мин (1...1000) |
298 | Порог значения тока, соответствующего крутящему моменту при достижения
позиции механического ограничителя | R/W | INT16 | мА (1...1000) |