LBA – (Loop Break Alarm) авария обрыва контура регулирования;
АД – активный датчик;
АНР – автоматическая настройка регулятора;
АЦП – аналого-цифровой преобразователь;
БУИМ – блок управления исполнительными механизмами;
ВУ – выходное устройство;
ВЭ – выходной элемент;
ДПЗ – датчик положения задвижки;
ИМ – исполнительный механизм;
КХС – контроль холодного спая;
ЛУ – логическое устройство;
НСХ – номинальная статическая характеристика;
ПИД (-регулятор) – пропорционально-интегрально-дифференциальный (регулятор);
ПК – персональный компьютер;
ПС – преобразователь сигнала;
ТП – преобразователь термоэлектрический (термопара);
ТС – термометр сопротивления;
ТСМ – термометр сопротивления медный;
ТСП – термометр сопротивления платиновый;
ТЭН – термоэлектрический нагреватель;
ЦАП– цифро-аналоговый преобразователь;
ЦИ – цифровой индикатор.
ШИМ – широтно-импульсная модуляция.
Руководство по эксплуатации
Используемые аббревиатуры
Используемые термины
Блок управления исполнительным механизмом – программный модуль, который позволяет управлять одним исполнительным механизмом при помощи одного или нескольких выходных элементов, подключенных к данному блоку.
Вычислитель – программный модуль в составе канала для вычисления выходной величины по одному или нескольким входным значениям.
Выходное устройство – комплекс программно-аппаратных модулей в составе канала регулирования, включающий ПС, БУИМ и ВЭ. Осуществляет связь Регулятора с внешними устройствами.
Выходной элемент – программно-аппаратный модуль в составе канала, служащий для подключения исполнительных механизмов.
Имя параметра – набор символов, однозначно определяющий доступ к параметру в приборе.
Индекс параметра – числовое значение для различения однотипных элементов с одинаковыми именами.
Инспектор – программный модуль в составе канала, который контролирует нахождение регулируемой величины в допустимых границах.
Информационный параметр – параметр, предоставляющий справочную информацию, но не влияющий на функционирование прибора. Может быть как изменяемым, так и неизменяемым.
Исполнительный механизм – управляемое прибором внешнее устройство, которое может изменять регулируемую величину.
Исполнительный механизм двухпозиционный – исполнительный механизм, имеющий два положения: «ВКЛ» и «ВЫКЛ».
Исполнительный механизм трехпозиционный (задвижка) – исполнительный механизм, управляемый тремя типами сигналов: «больше» / «меньше» / «выкл.».
Канал – группа элементов прибора, предназначенных для регулирования и/или мониторинга изменения одной физической величины (температуры, давления и др.), вычисляемой (контролируемой) по результатам измерения одним или несколькими датчиками.
Конфигурация – совокупность значений всех параметров, определяющих работу прибора.
Мастер сети – прибор (или ПК), инициирующий обмен данными между отправителем и получателем в сети RS-485.
Модификация (программная) – совокупность значений основных параметров, которые определяют работу прибора. Записывается в энергонезависимую память на заводе-изготовителе.
«Нагреватель» – исполнительный механизм для увеличения значения регулируемой величины.
Объект логический (Объект) – совокупность программных модулей, предназначенных для управления одним физическим объектом.
Объект физический – устройство/установка для осуществления технологического процесса, который характеризуется набором регулируемых параметров.
Параметры оперативные – данные о текущем состоянии и процессе работы (регулирования и мониторинга) прибора.
Параметры конфигурационные – параметры, определяющие конфигурацию прибора (задаются с помощью программы-конфигуратора или с лицевой панели).
Параметры сетевые – специальные конфигурационные параметры, определяющие работу прибора в сети RS-485.
Преобразователь сигнала – программный модуль в составе канала регулирования, который ограничивает и распределяет выходной сигнал Регулятора.
Программный модуль – блок программы прибора для выполнения конкретного действия. В приборе может быть несколько однотипных программных модулей.
Регистратор – программный модуль в составе канала, предназначенный для преобразования величины, пришедшей с Вычислителя, в аналоговый сигнал. Передает сигналы на ВУ типа ЦАП.
Регулятор – программный модуль в составе канала, который поддерживает измеренную или вычисленной величины на заданном уровне.
Система исполнительных механизмов – группа исполнительных механизмов, управляемая одним сигналом от одного регулятора.
Служебный параметр – параметр, который предоставляет справочную информацию и влияющий на функционирование прибора. Параметр защищен от редактирования.
Уставка – заданное значение (диапазон значений), в пределах которого прибор поддерживает измеренный сигнал или вычисленную величину.
Формат данных – тип значений параметров. Различают следующие форматы: целое число, число с плавающей точкой и др.
«Холодильник» – исполнительный механизм для уменьшения значения регулируемой величины.
Введение
Настоящее Руководство по эксплуатации предназначено для ознакомления
обслуживающего персонала с устройством, принципом действия, конструкцией,
работой и техническим обслуживанием
Прибор выпускается согласно
Прибор изготавливается в различных модификациях, зашифрованных в коде полного условного обозначения:
ТРМ148-Х – прибор в корпусе щитового крепления Щ4,
ТРМ148-Х.Щ7 – прибор в корпусе щитового крепления Щ7,
где X – тип встроенных выходных устройств.
Типы встроенных выходных устройств:
Р – реле электромагнитное;
К – оптопара транзисторная n-p-n-типа;
С – оптопара симисторная;
И – ЦАП «параметр-ток от 4 до 20 мА»;
Т – выход для управления внешним твердотельным реле;
У – ЦАП «параметр-напряжение».
Пример обозначения прибора при заказе: ТРМ148-СCCCРPPP.
Приведенное условное обозначение указывает, что изготовлению и поставке подлежит измеритель-регулятор микропроцессорный ТРМ148, оснащенный восемью выходными элементами: четырьмя симисторными оптопарами и четырьмя электромагнитными реле.
Установка ВЭ должна выполняться с учетом следующих ограничений:
При заказе прибора названия типов ВЭ нужно располагать в определенном порядке: И → Т → С → К → Р → У
Если в приборе требуются и аналоговые выходы (например, типа И) и дискретные (например, типа Р), то на первые места устанавливаются выходные элементы типа И, на последующие – типа Р.
Пример:
ТРМ148-ИИИРРРРР – допустимая комплектация;
ТРМ148-РРРРРИИИ – недопустимая комплектация.
Выходные элементы типа У могут быть установлены только в последние 4 места.
Назначение и функции
Прибор предназначен для построения автоматических систем контроля и регулирования технологических процессов в различных областях промышленности, в сельском и коммунальном хозяйстве.
Прибор выполняет следующие основные функции:
конфигурирование функциональной схемы и редактирование рабочих параметров с помощью встроенной клавиатуры управления;
возможность выбора одной из предустановленных функциональных схем прибора;
измерение физических величин, контролируемых входными первичными преобразователями с учетом нелинейности их НСХ;
цифровая фильтрация и коррекция измеренных значений для устранения погрешностей;
отображение результатов измерений и заданных параметров на встроенных светодиодных ЦИ;
вывод информации о неисправностях на ЦИ и аварийная сигнализация;
управление внешними исполнительными механизмами и устройствами по заданным законам регулирования;
ручное управление исполнительными механизмами и устройствами с помощью кнопок;
передача по RS-485 информации о значениях контролируемых датчиками величин и установленных рабочих параметрах, а также настройка параметров с помощью программы-конфигуратора на ПК;
сохранение редактируемых параметров в энергонезависимой памяти.
Предприятие-изготовитель устанавливает на прибор программные модификации, которые можно настроить под конкретное использование.
Технические характеристики и условия эксплуатации
Технические характеристики
Общие характеристики
Наименование | Значение |
|---|---|
Диапазон переменного напряжения питания | 90 … 264 В (частотой 47 … 63 Гц) |
Потребляемая мощность, не более | 20 ВА |
Количество каналов измерения | 8 |
Время опроса одного канала, не более | 0,4 с |
Количество выходных элементов | 8 |
Напряжение встроенного источника питания (ток нагрузки) | 24 ± 3 В постоянного тока (максимум 180 мА) |
Интерфейс связи с ПК | RS-485 |
Скорость передачи данных по RS-485 | 2,4; 4,8; 9,6; 14,4; 19,2; 28,8; 38,4; 57,6; 115,2 кбит/с |
Протоколы обмена по RS-485 | ОВЕН, Modbus ASCII/RTU (Slave) |
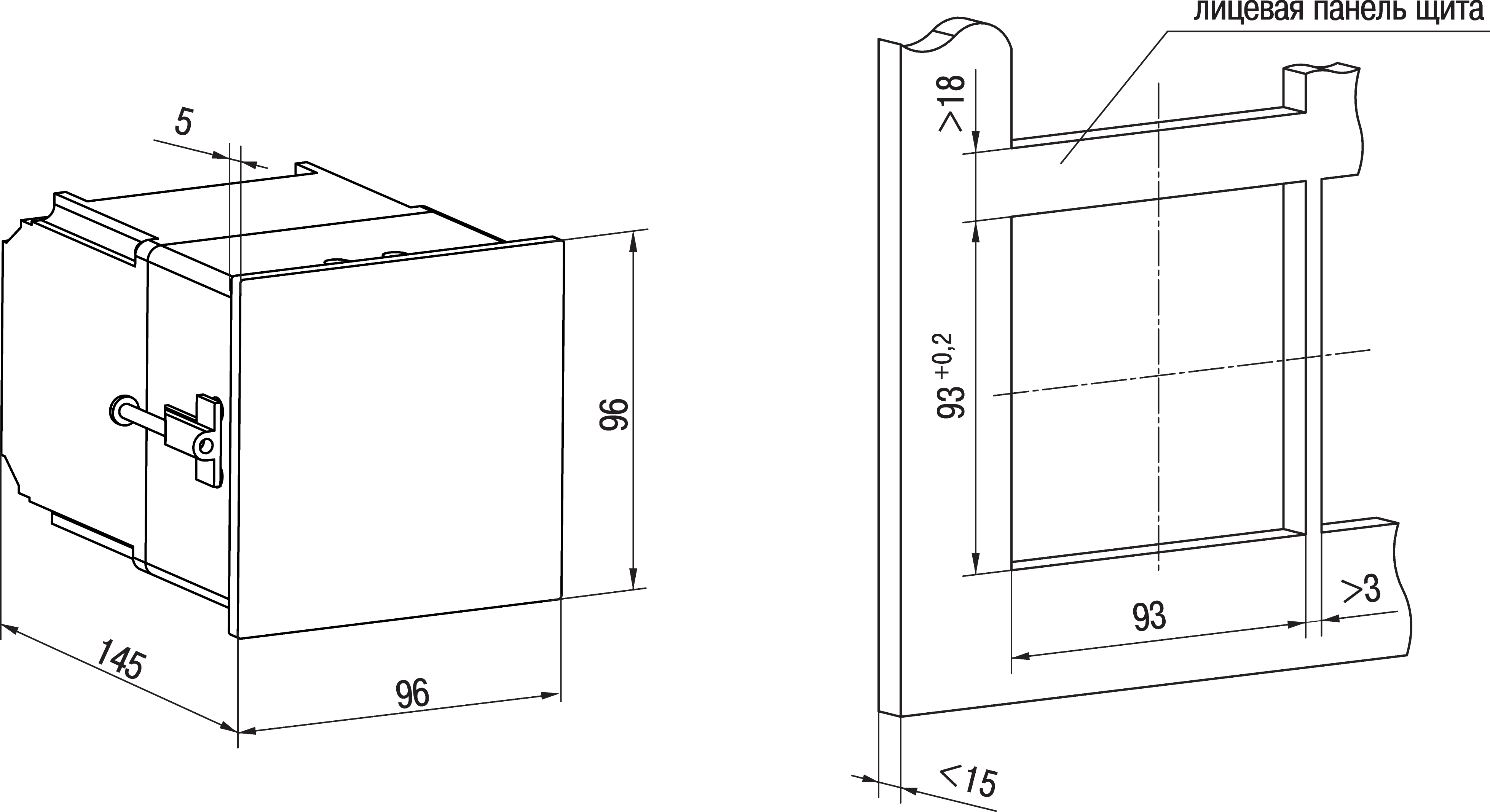
Габаритные размеры корпуса Щ4 | 96 × 96 × 145 мм |
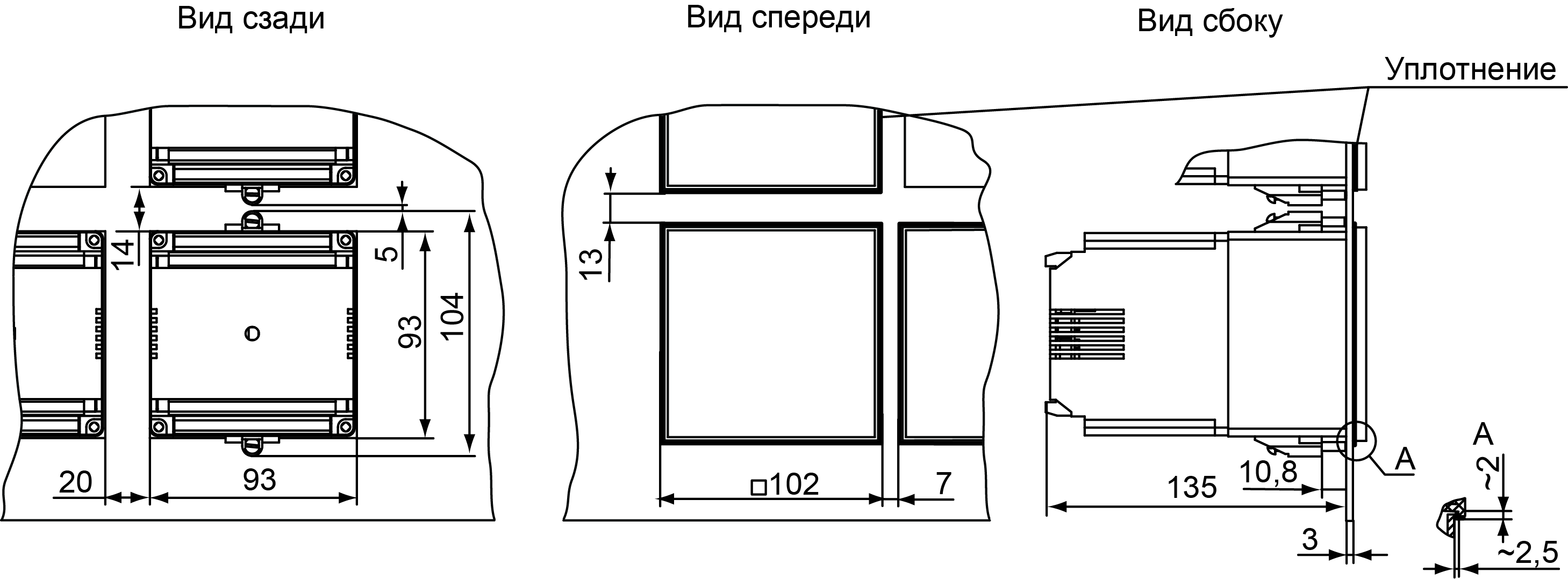
Габаритные размеры корпуса Щ7 | 144 × 169 × 50,5 мм |
Масса, не более | 1,5 кг |
Средний срок службы | 8 лет |
Средняя наработка на отказ | 100000 час |
Используемые на входе сигналы постоянного тока и напряжения
Датчик или входной сигнал | Диапазон измерений, % | Значение единицы младшего разряда | Предел основной приведенной погрешности, % |
|---|---|---|---|
| Сигнал постоянного напряжения | |||
–50…+50 мВ | 0…100 | МЗР* | ± 0,25 |
| Унифицированные сигналы постоянного напряжения и тока | |||
0...1 В | 0...100 | МЗР | ± 0,25 |
0...5 мА | 0...100 | МЗР | |
0...20 мА | 0...100 | МЗР | |
4...20 мА | 0...100 | МЗР | |
| Датчики положения задвижек | |||
Резистивный (0…900 Ом) | 0…100 | МЗР | Производителем не устанавливается |
Резистивный (0…2 кОм) | 0…100 | МЗР | |
Токовый 0(4)…20 мА | 0…100 | МЗР | |
Токовый 0…5 мА | 0…100 | МЗР | |
| |||
Датчики и входные сигналы
| Датчик или входной сигнал | Диапазон измерений | Значение единицы младшего разряда2) | Предел основной приведенной погрешности, % |
|---|---|---|---|
| ТС или ТП по ГОСТ 6651-20093) | |||
Cu 50 (α = 0,00426 °С-1)1), 4) | –50…+200 °С | МЗР | ± 0,25 |
50М (α = 0,00428 °С -1) | –190…+200 °С | ||
Pt 50 (α = 0,00385 °С -1) | –200…+750 °С | ||
50П (α = 0,00391 °С -1) | –200…+750 °С | ||
Cu 100 (α = 0,00426 °С -1)4) | –50…+200 °С | ||
100М (α = 0,00428 °С -1) | –190…+200 °С | ||
Pt 100 (α = 0,00385 °С -1) | –200…+750 °С | ||
100П (α = 0,00391 °С -1) | –240…+750 °С | ||
| Термоэлектрические преобразователи по ГОСТ Р 8.585-2001 | |||
TХК (L) | –200…+800 °С | МЗР | ± 0,5 (± 0,25) 5) |
TЖК (J) | –200…+1200 °С | ||
TНН (N) | –200…+1300 °С | ||
TХА (К) | –200…+1300 °С | ||
TПП (S) | 0…+1750 °С | ||
TПП (R) | 0…+1750 | ||
ТПР (В) | +200…+1800 | ||
TВР (А-1) | 0…+2500 °С | ||
ТВР (А-2) | 0…+1800 | ||
ТВР (А-3) | 0…+1800 | ||
| Сигнал постоянного напряжения | |||
–50...+50 мВ | 0...100 % | 0,1 % | ± 0,25 |
| Унифицированные сигналы по ГОСТ 26.011-80 | |||
0...1 В | 0...100 % | 0,1 % | ± 0,25 |
0...5 мА | 0...100 % | 0,1 % | |
0...20 мА | 0...100 % | 0,1 % | |
4...20 мА | 0...100 % | 0,1 % | |
1) Коэффициент, определяемый по формуле 2) При температуре выше 999,9 и ниже минус 199,9 °С цена единицы младшего разряда равна 1 °С. 3) Допускается применение нестандартизованного медного ТС с R0 = 53 Ом, α = 0,00426 °С -1 и диапазоном измерений от минус 50 до +180 °С. 4) В Республике Беларусь носит справочную информацию. 5) Основная приведенная погрешность без КХС | |||

Выходные устройства
Наименование ВУ (обозначение типа) | Технические характеристики | Значение |
|---|---|---|
Реле электромагнитное (Р) | Максимальный ток нагрузки | 4 А |
Максимальное напряжение нагрузки переменного тока, не менее | 220 В 50 Гц и cos φ > 0,4 | |
Оптопара транзисторная n-p-n-типа (К) | Максимальный ток нагрузки | 400 мА |
Максимальное напряжение, не более | 60 В постоянного тока | |
Оптопара симисторная (С) | Максимальный ток нагрузки | 50 мА |
Максимальное напряжение, не более | 300 В | |
Выход для управления внешним твердотельным реле (Т) | Выходное напряжение, не менее | 4…6 В |
| Максимальный выходной ток | 50 мА | |
ЦАП «параметр-ток» (И) | Сопротивление нагрузки | от 0 до 900 Ом |
| ЦАП «параметр-напряжение» (У) | Сопротивление нагрузки, не менее | 2 кОм |
Условия эксплуатации
Прибор эксплуатируется при следующих условиях:
- закрытые взрывобезопасные помещения без агрессивных паров и газов;
- температура окружающего воздуха от +5 до +50 °С;
- верхний предел относительной влажности воздуха: не более 80 % при +35 °С и более низких температурах без конденсации влаги;
- атмосферное давление от 84 до 106,7 кПа.
По устойчивости к климатическим воздействиям при эксплуатации прибор соответствует группе исполнения В4 по ГОСТ 12997-84. По устойчивости к механическим воздействиям при эксплуатации прибор соответствует группе исполнения N1 по ГОСТ 12997-84.
Меры безопасности
По способу защиты от поражения электрическим током прибор соответствует классу II по ГОСТ 12.2.007.0-75.
Во время эксплуатации, технического обслуживания и поверки прибора следует соблюдать требования ГОСТ 12.3.019-80, «Правил эксплуатации электроустановок потребителей» и «Правил охраны труда при эксплуатации электроустановок».
Не допускается попадание влаги на контакты выходного разъема и внутренние электроэлементы прибора. Прибор запрещено использовать в агрессивных средах с содержанием в атмосфере кислот, щелочей, масел и т. п.
Монтаж
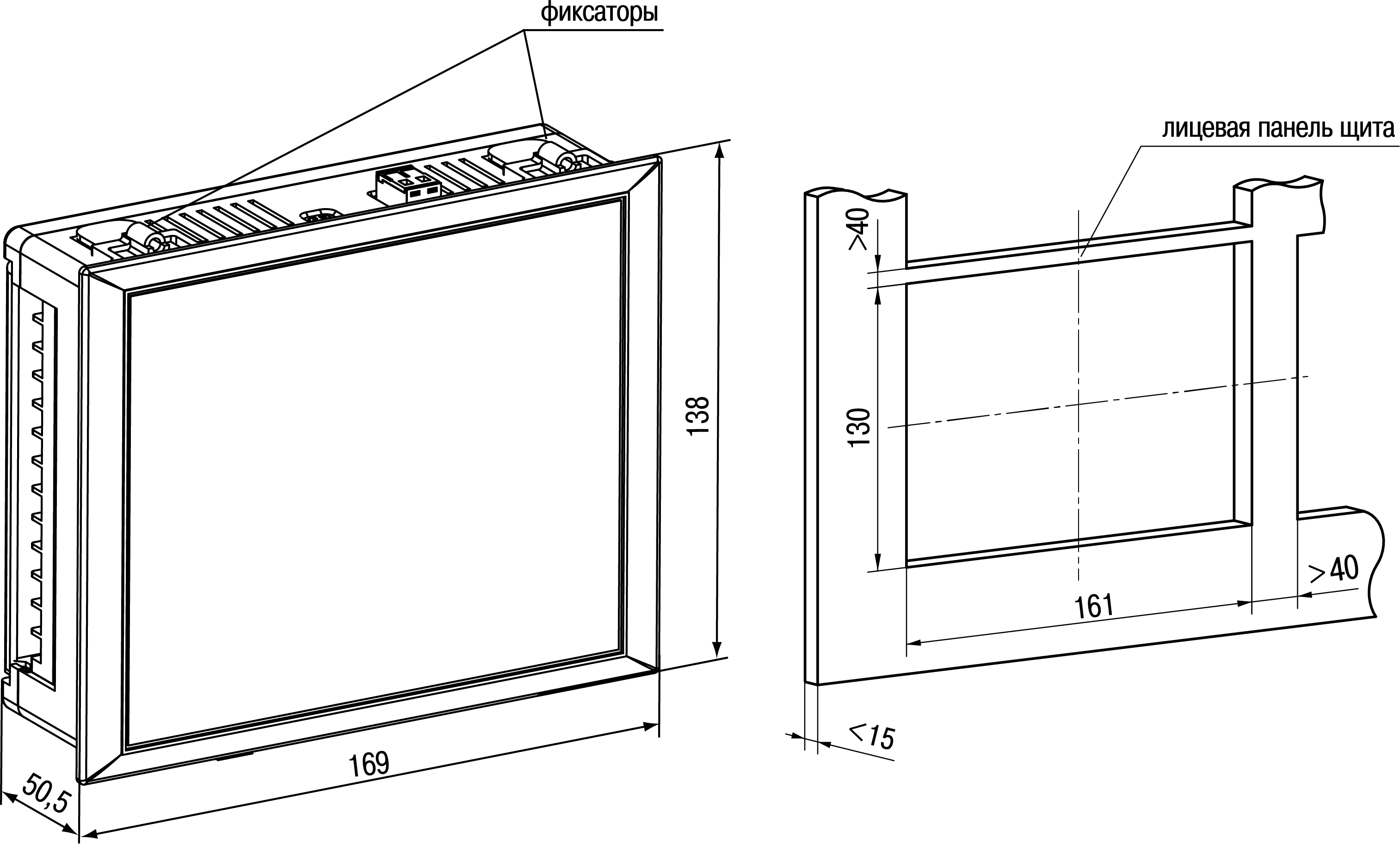
Установка прибора щитового крепления Щ4
Для установки прибора следует:
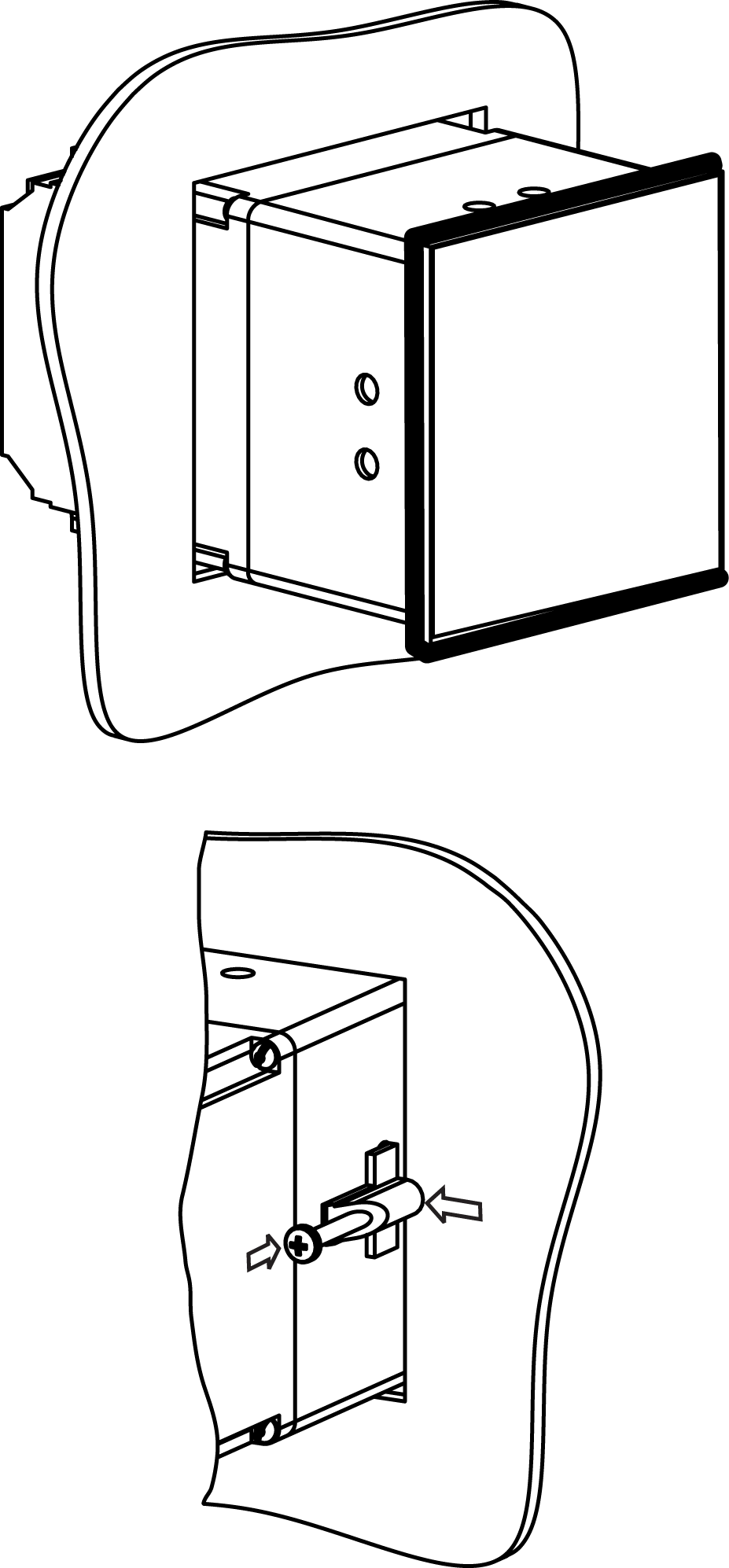
- Подготовить на щите управления монтажный вырез для установки прибора (см. рисунок).
- Установить прокладку на рамку прибора для обеспечения степени защиты IP54.
- Вставить прибор в монтажный вырез.
- Вставить фиксаторы из комплекта поставки в отверстия на боковых стенках прибора.
- С усилием завернуть винты М4 × 35 из комплекта поставки в отверстиях каждого фиксатора так, чтобы прибор был плотно прижат к лицевой панели щита.
Демонтаж прибора следует производить в обратном порядке.
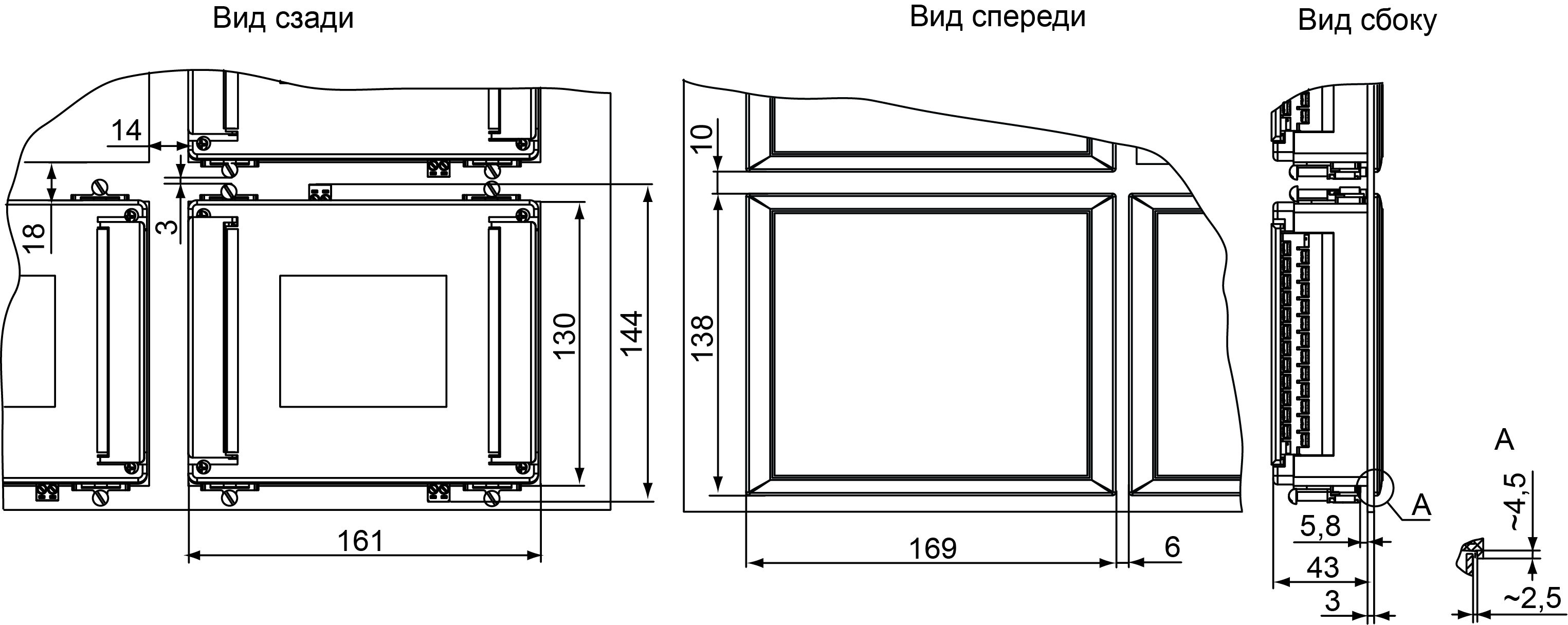
Установка прибора щитового крепления Щ7
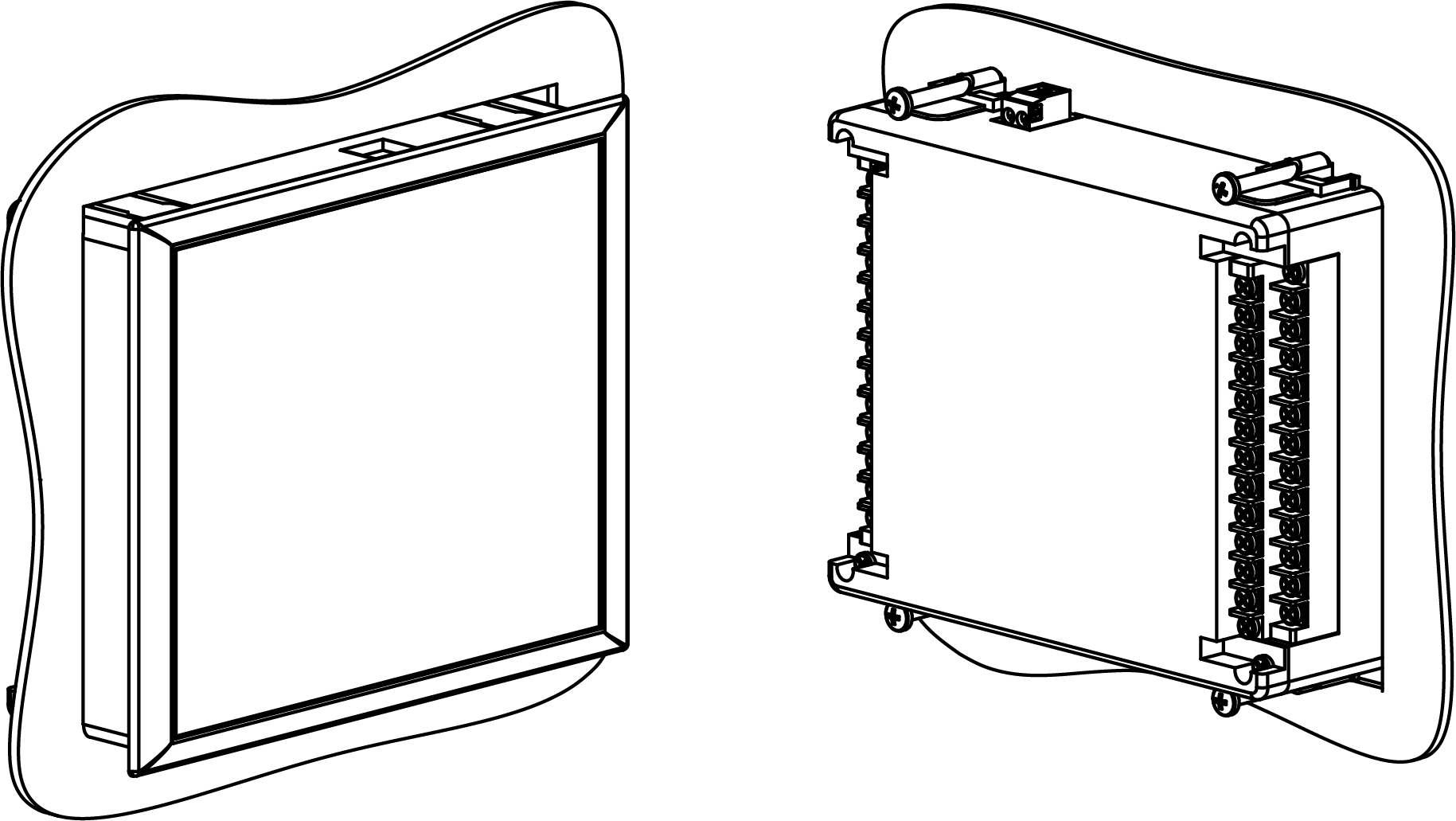
Для установки прибора следует:
- Подготовить на щите управления монтажный вырез для установки прибора (см. рисунок).
- Установить прокладку на рамку прибора для обеспечения степени защиты IP54.
- Вставить прибор в монтажный вырез.
- Вставить фиксаторы из комплекта поставки в отверстия на боковых стенках прибора.
- С усилием завернуть винты М4 × 35 из комплекта поставки в отверстиях каждого фиксатора так, чтобы прибор был плотно прижат к лицевой панели щита.
Демонтаж прибора следует производить в обратном порядке.
Подключение
Рекомендации по подключению
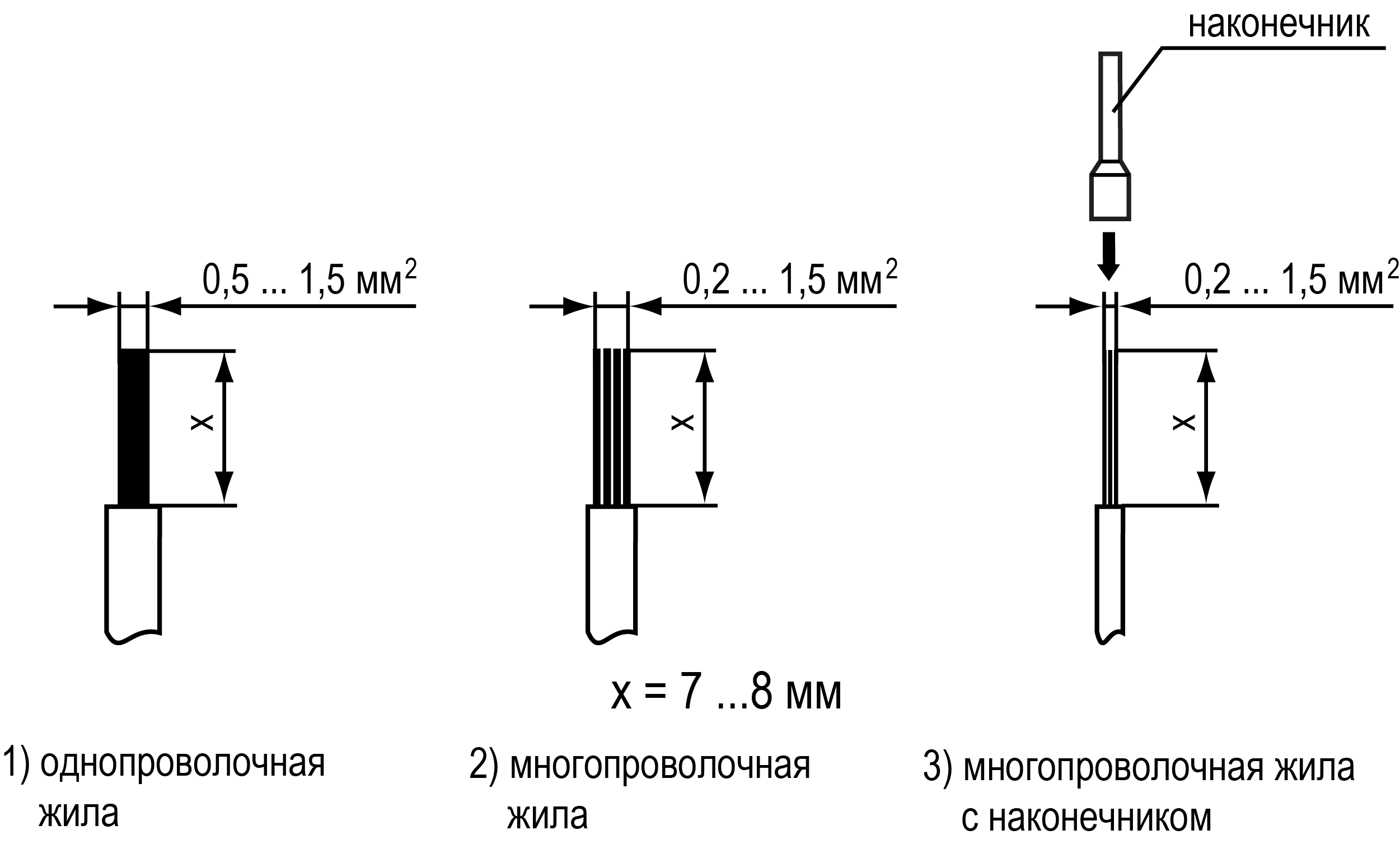
Для обеспечения надежности электрических соединений следует использовать медные кабели и провода с однопроволочными или многопроволочными жилами. Концы проводов следует зачистить. Многопроволочные жилы следует залудить или использовать кабельные наконечники.
Требования к сечениям жил кабелей указаны на рисунке ниже.
Общие требования к линиям соединений:
- во время монтажа кабелей следует выделить сигнальные линии связи, соединяющие прибор с датчиком в самостоятельную трассу (или несколько трасс). Трассу (или несколько трасс) расположить отдельно от силовых кабелей, а также от кабелей, создающих высокочастотные и импульсные помехи;
- для защиты входов прибора от влияния промышленных электромагнитных помех следует экранировать линии связи прибора с датчиком. В качестве экранов могут быть использованы специальные кабели с экранирующими оплетками или заземленные стальные трубы подходящего диаметра. Экраны кабелей с экранирующими оплетками следует подключить к контакту функционального заземления (FE) в щите управления;
- фильтры сетевых помех следует устанавливать в линиях питания прибора;
- искрогасящие фильтры следует устанавливать в линиях коммутации силового оборудования.
Монтируя систему, в которой работает прибор, следует учитывать правила организации эффективного заземления:
- все заземляющие линии следует прокладывать по схеме «звезда» с обеспечением хорошего контакта;
- все заземляющие цепи должны быть выполнены проводами наибольшего сечения;
- запрещается объединять клеммы прибора и заземляющие линии.
Порядок подключения
Если прибор находился длительное время при температуре ниже минус 20 °С, то перед включением и началом работ следует выдержать его в помещении с температурой, соответствующей рабочему диапазону, в течение 30 мин.
Для подключения прибора следует:
Соединить прибор с источником питания.
 ВниманиеПеред подачей питания на прибор следует проверить правильность подключения напряжения питания и его уровень.
ВниманиеПеред подачей питания на прибор следует проверить правильность подключения напряжения питания и его уровень.- Подать питание на прибор.
- Выполнить настройку прибора.
- Снять питание.
- Подключить линии связи «прибор – датчики» к первичным преобразователям и входам прибора.
Во время работы прибор проверяет исправность подключенных датчиков. Аварийными ситуациями по входу считаются следующие:
- выход из строя датчика (обрыв или короткое замыкание ТС, обрыв ТП или унифицированного датчика);
- выход измеряемой величины за диапазон измерения;
При возникновении аварии по входу прибор переходит в следующее состояние:
- мигает светодиод канала, на котором обнаружена авария;
- на цифровой индикатор выводится сообщение о типе аварийной ситуации.
Во время аварии на ЦИ отображается:
- температура «холодного спая» – в случае короткого замыкания ТП;
- значение нижнего предела диапазона – в случае короткого замыкания датчиков 0...1 В, замыкания шунта 0...5 мА, 0...20 мА или обрыва датчиков 0...5 мА, 0...20 мА;
- значение середины диапазона – в случае короткого замыкания датчика «–50 ... + 50 мВ».
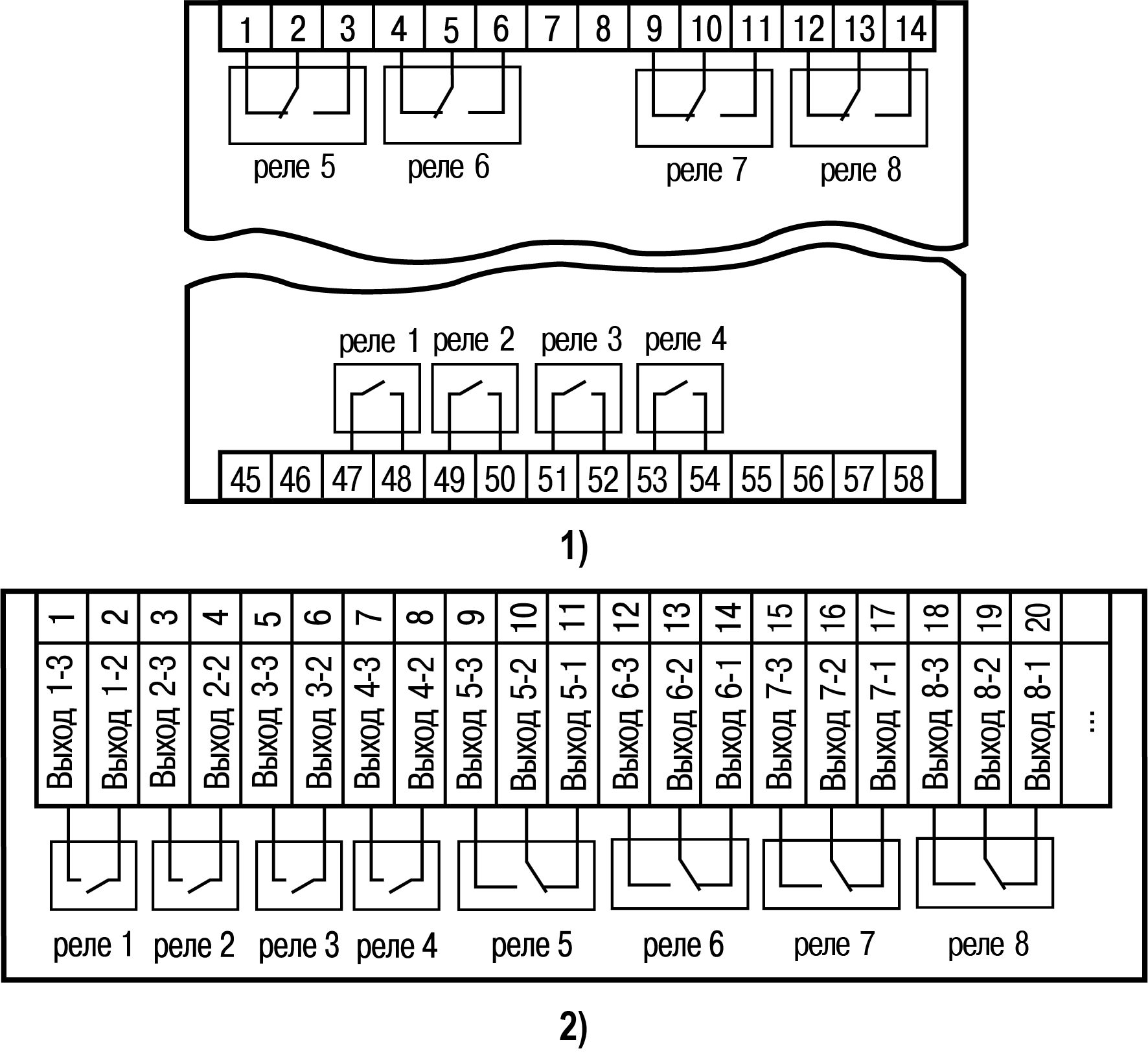
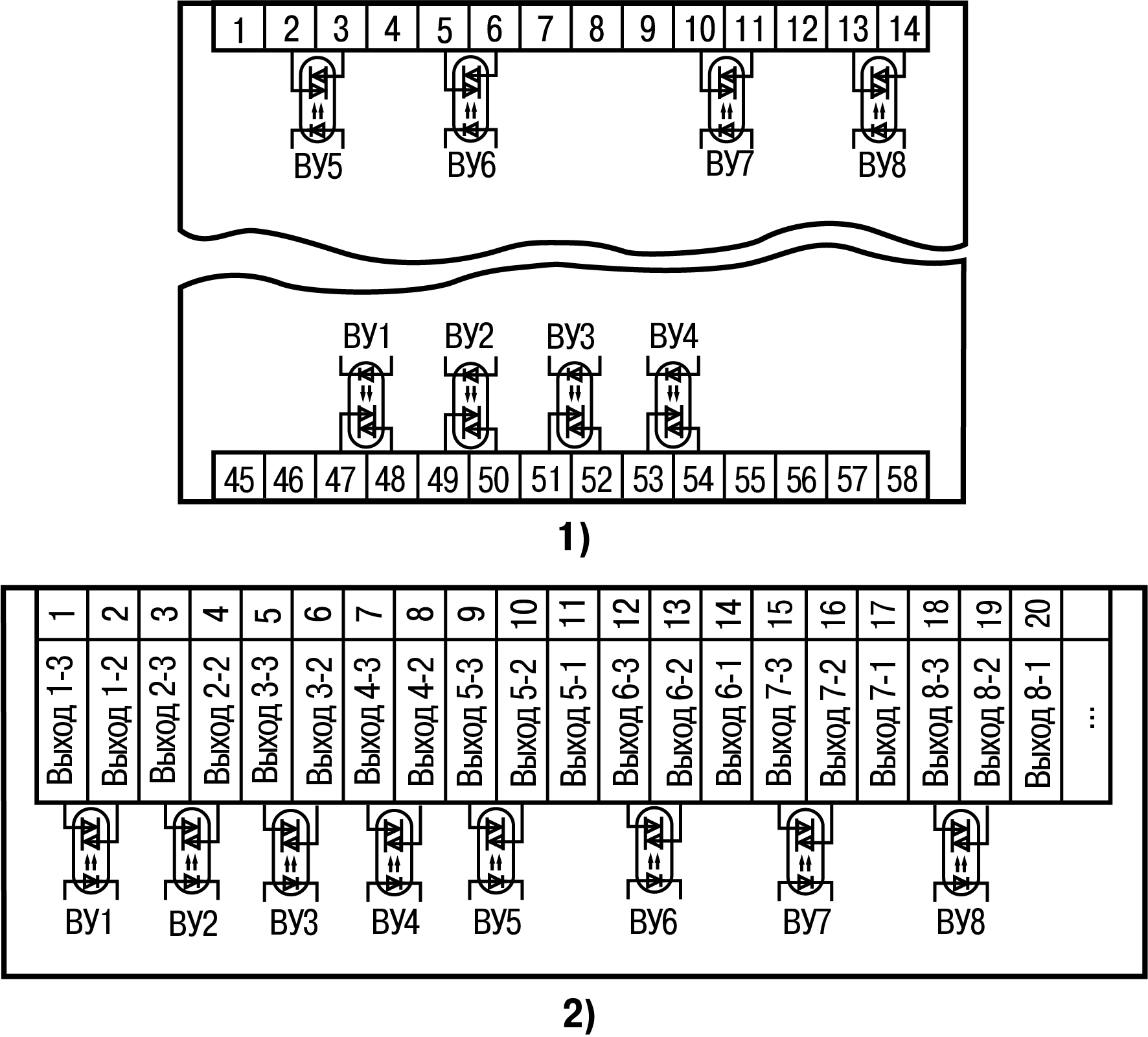
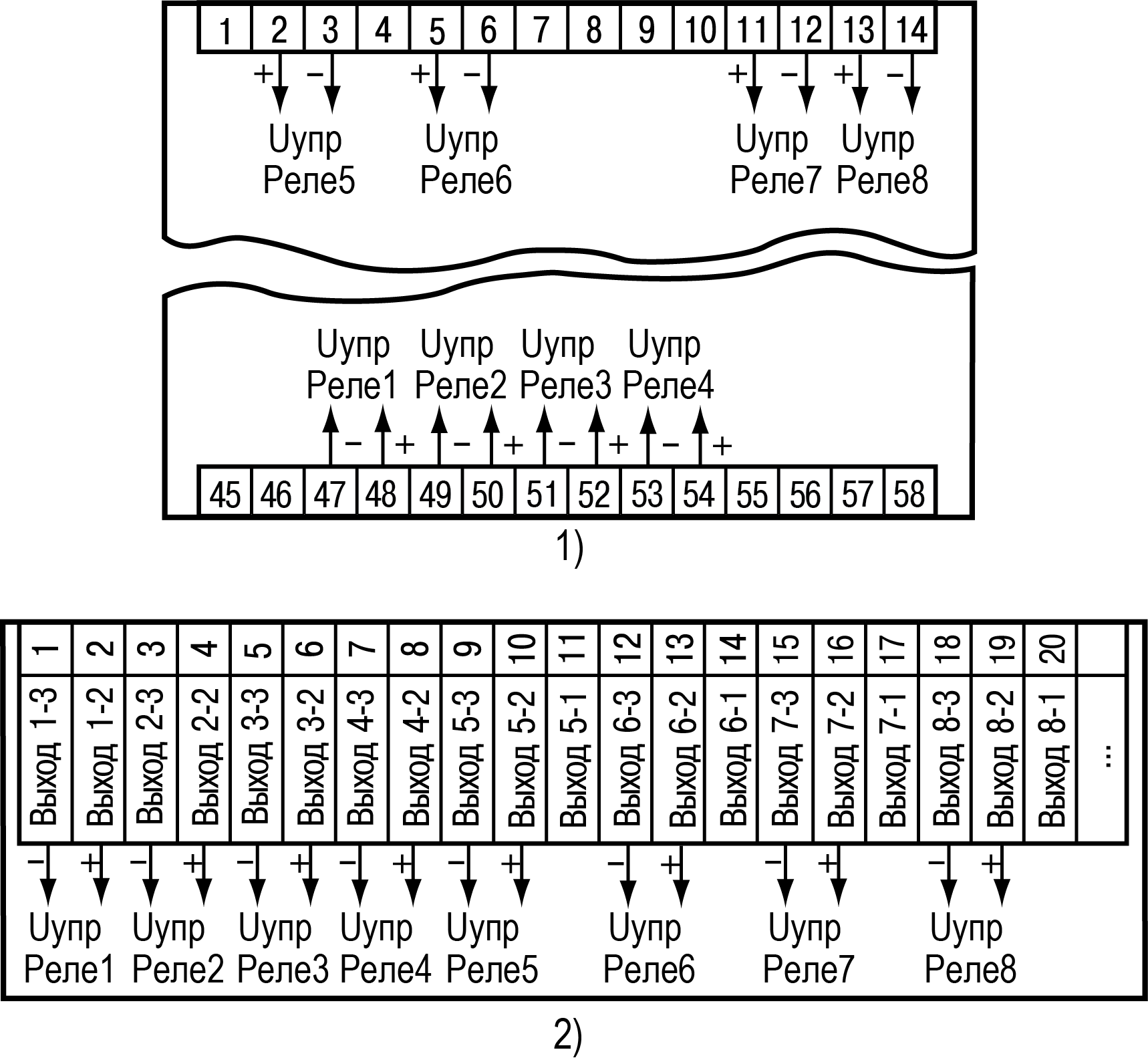
Назначение контактов клеммника
Серой заливкой обозначены неиспользуемые клеммы.
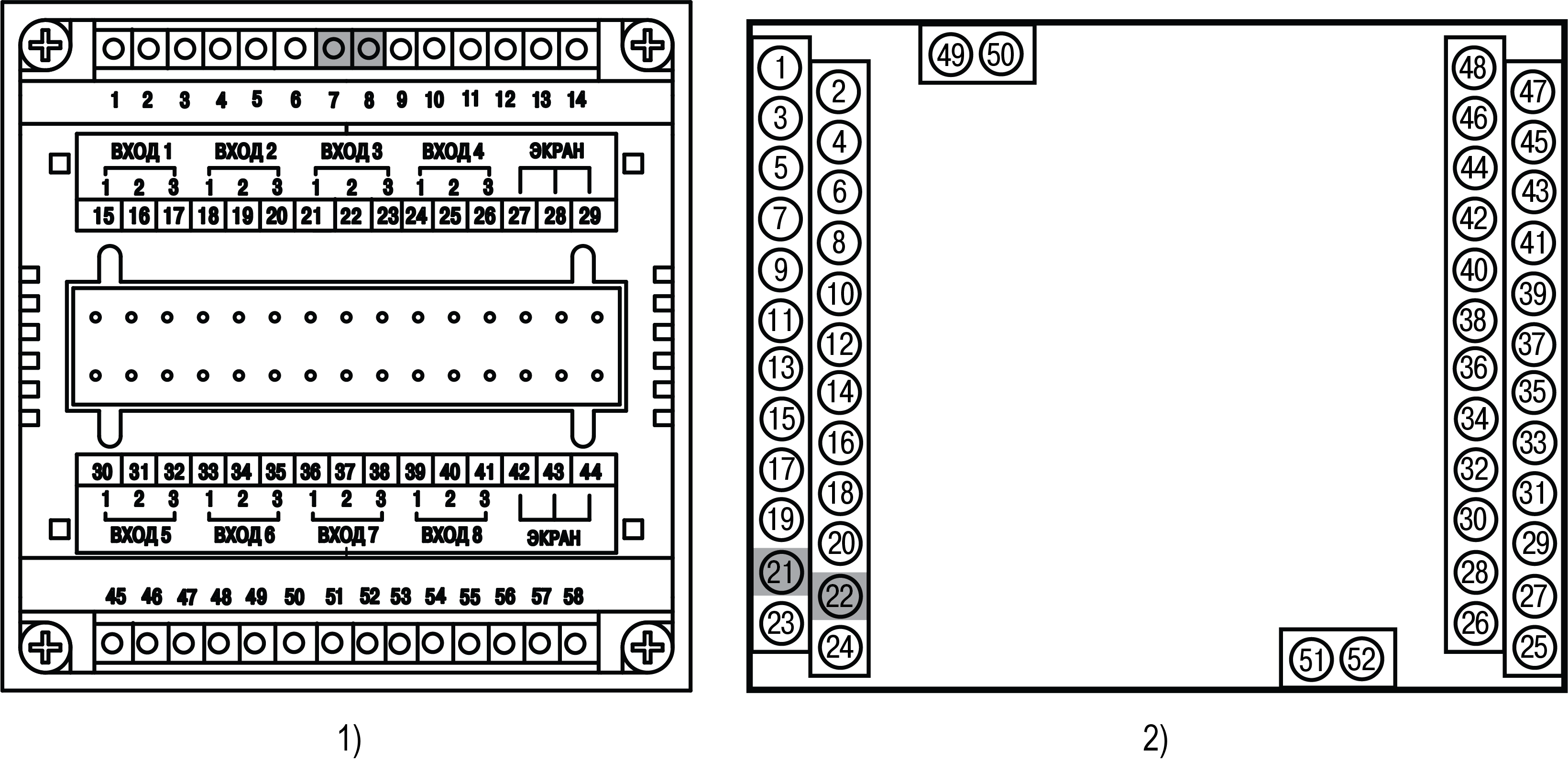
Клеммник ТРМ148–Х
Номер контакта | Назначение | Номер контакта | Назначение |
|---|---|---|---|
1 | Выход 5-1 | 30 | Вход 5-1 |
2 | Выход 5-2 | 31 | Вход 5-2 |
3 | Выход 5-3 | 32 | Вход 5-3 |
4 | Выход 6-1 | 33 | Вход 6-1 |
5 | Выход 6-2 | 34 | Вход 6-2 |
6 | Выход 6-3 | 35 | Вход 6-3 |
7 | Не задействован | 36 | Вход 7-1 |
8 | Не задействован | 37 | Вход 7-2 |
9 | Выход 7-1 | 38 | Вход 7-3 |
10 | Выход 7-2 | 39 | Вход 8-1 |
11 | Выход 7-3 | 40 | Вход 8-2 |
12 | Выход 8-1 | 41 | Вход 8-3 |
13 | Выход 8-2 | 42 | Общий (экран) |
14 | Выход 8-3 | 43 | Общий (экран) |
15 | Вход 1-1 | 44 | Общий (экран) |
16 | Вход 1-2 | 45 | Сеть 90…264 В |
17 | Вход 1-3 | 46 | Сеть 90…264 В |
18 | Вход 2-1 | 47 | Выход 1-1 |
19 | Вход 2-2 | 48 | Выход 1-2 |
20 | Вход 2-3 | 49 | Выход 2-1 |
21 | Вход 3-1 | 50 | Выход 2-2 |
22 | Вход 3-2 | 51 | Выход 3-1 |
23 | Вход 3-3 | 52 | Выход 3-2 |
24 | Вход 4-1 | 53 | Выход 4-1 |
25 | Вход 4-2 | 54 | Выход 4-2 |
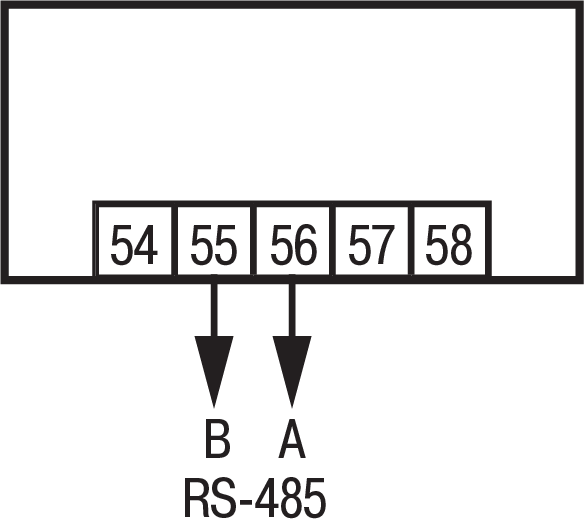
26 | Вход 4-3 | 55 | RS-485 (В) |
27 | Общий (экран) | 56 | RS-485 (А) |
28 | Общий (экран) | 57 | +24 В |
29 | Общий (экран) | 58 | -24 В |
Клеммник ТРМ148–Х.Щ7
Номер контакта | Назначение | Номер контакта | Назначение |
|---|---|---|---|
1 | Выход 1-3 (– для ЦАП) | 27 | Вход 8-2 |
2 | Выход 1-2 (+ для ЦАП) | 28 | Вход 7-2 |
3 | Выход 2-3 (– для ЦАП) | 29 | Вход 8-1 |
4 | Выход 2-2 (+ для ЦАП) | 30 | Вход 7-1 |
5 | Выход 3-3 (– для ЦАП) | 31 | Вход 6-3 |
6 | Выход 3-2 (+ для ЦАП) | 32 | Вход 5-3 |
7 | Выход 4-3 (– для ЦАП) | 33 | Вход 6-2 |
8 | Выход 4-2 (+ для ЦАП) | 34 | Вход 5-2 |
9 | Выход 5-3 (– для ЦАП) | 35 | Вход 6-1 |
10 | Выход 5-2 (+ для ЦАП) | 36 | Вход 5-1 |
11 | Выход 5-1 | 37 | Вход 4-3 |
12 | Выход 6-3 (– для ЦАП) | 38 | Вход 3-3 |
13 | Выход 6-2 (+ для ЦАП) | 39 | Вход 4-2 |
14 | Выход 6-1 | 40 | Вход 3-2 |
15 | Выход 7-3 (– для ЦАП) | 41 | Вход 4-1 |
16 | Выход 7-2 (+ для ЦАП) | 42 | Вход 3-1 |
17 | Выход 7-1 | 43 | Вход 2-3 |
18 | Выход 8-3 (– для ЦАП) | 44 | Вход 1-3 |
19 | Выход 8-2 (+ для ЦАП) | 45 | Вход 2-2 |
20 | Выход 8-1 | 46 | Вход 1-2 |
21 | Не задействован | 47 | Вход 2-1 |
22 | Не задействован | 48 | Вход 1-1 |
23 | Питание | 49 | RS-485 (A) |
24 | Питание | 50 | RS-485 (B) |
25 | Вход 8-3 | 51 | –24 В |
26 | Вход 7-3 | 52 | +24 В |
Подключение датчиков
Общие сведения
Входные измерительные устройства в приборе являются универсальными, т. е. к ним можно подключать любые первичные преобразователи (датчики) из перечисленных в таблице. К входам прибора можно подключить одновременно два датчика разных типов в любых сочетаниях.
Во время проверки исправности датчика и линии связи следует отключить прибор от сети питания. Для избежания выхода прибора из строя при «прозвонке» связей следует использовать измерительные устройства с напряжением питания не более 4,5 В. При более высоких напряжениях питания этих устройств отключение датчика от прибора обязательно.
Цифровые входы прибора разделены на группы по четыре входа, гальванически изолированные от других цепей. Каждая группа входов имеет свою общую клемму питания. Дискретные датчики следует подключать к входам только относительно клеммы питания входов для данной группы.
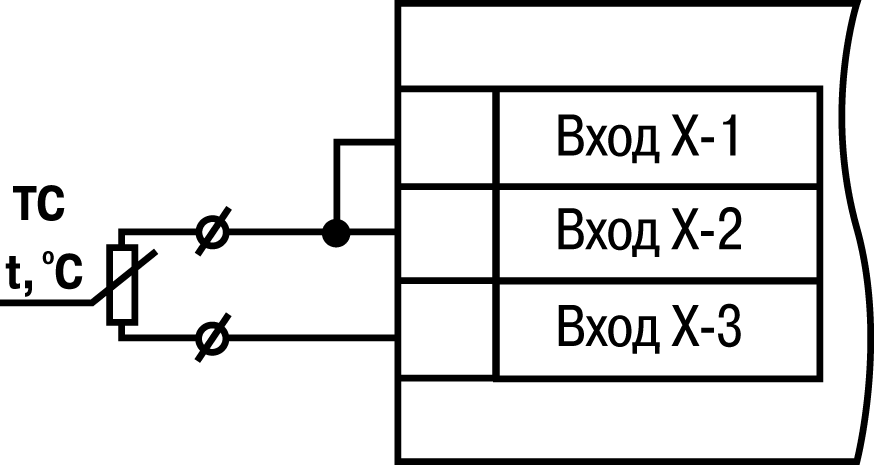
Подключение ТС по трехпроводной схеме
В приборе используется трехпроводная схема подключения ТС.
Допускается соединение ТС с прибором по двухпроводной линии только с обязательным выполнением определенных условий (см. раздел ниже).
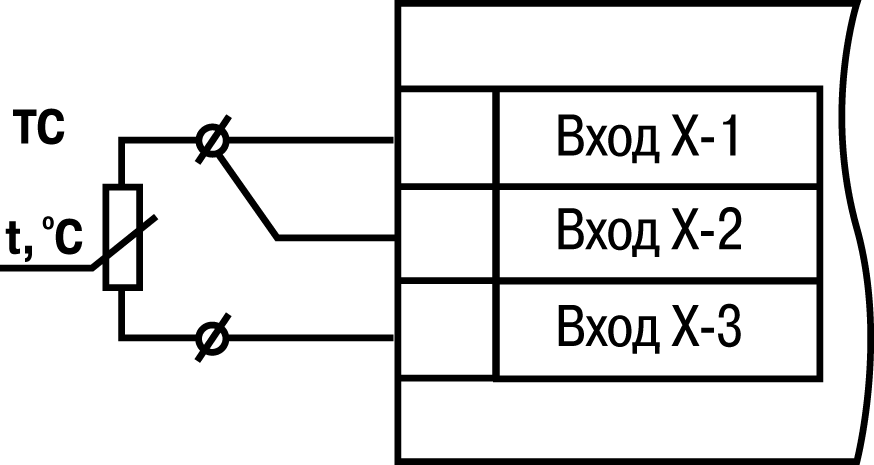
Подключение ТС по двухпроводной схеме
Соединение ТС с прибором по двухпроводной схеме производится в случае невозможности использования трехпроводной схемы, например, при установке прибора на объектах, оборудованных ранее проложенными двухпроводными монтажными трассами.
Схема подключения приведена на рисунке ниже.
Для подключения ТС по двухпроводной схеме следует выполнить действия:
- Установить перемычки между контактами Вход Х-1 и Вход Х-2 клеммника прибора, а двухпроводную линию подключить, соответственно, к контактам Вход Х-2 и Вход Х-3.
- Подключить к противоположным от прибора концам линии связи «датчик-прибор» вместо ТС магазин сопротивления с классом точности не ниже 0,05 (например, МСР-63).
- Установить на магазине значение, равное сопротивлению ТС при температуре 0 °С (50,00; 53,00 или 100,00 Ом, в зависимости от типа датчика).
- Подать питание на приборы для соответствующего канала. По показаниям ЦИ-1 зафиксировать величину отклонения температуры от 0 °С. Полученное отклонение всегда должно иметь положительное значение, а величина его будет зависеть от сопротивления линии связи «датчик-прибор».
- Задать для данного датчика в параметре in.SH значение «сдвига характеристики», равное по величине показаниям прибора в п.4 и взятое с противоположным знаком.
- Выйти из настройки и убедиться, что показания прибора на данном канале равны 0 ± 0,2 °С.
- Снять питание. Восстановить соединение линии с датчиком.
- Повторить действия пп. 1 - 7 для остальных каналов контроля, использующих двухпроводную схему соединения.
Подключение ТП
Прибор и ТП следует соединять напрямую (при достаточной длине проводников ТП) или при помощи удлинительных компенсационных проводов, соответствующих типу используемых в ТП, с соблюдением полярности. Допускается также использовать провода из металлов с термоэлектрическими характеристиками, которые в диапазоне температур 0 ... 100 °С аналогичны характеристикам материалов электродов термопары. Рабочий спай термопары должен быть электрически изолирован от заземленного оборудования.
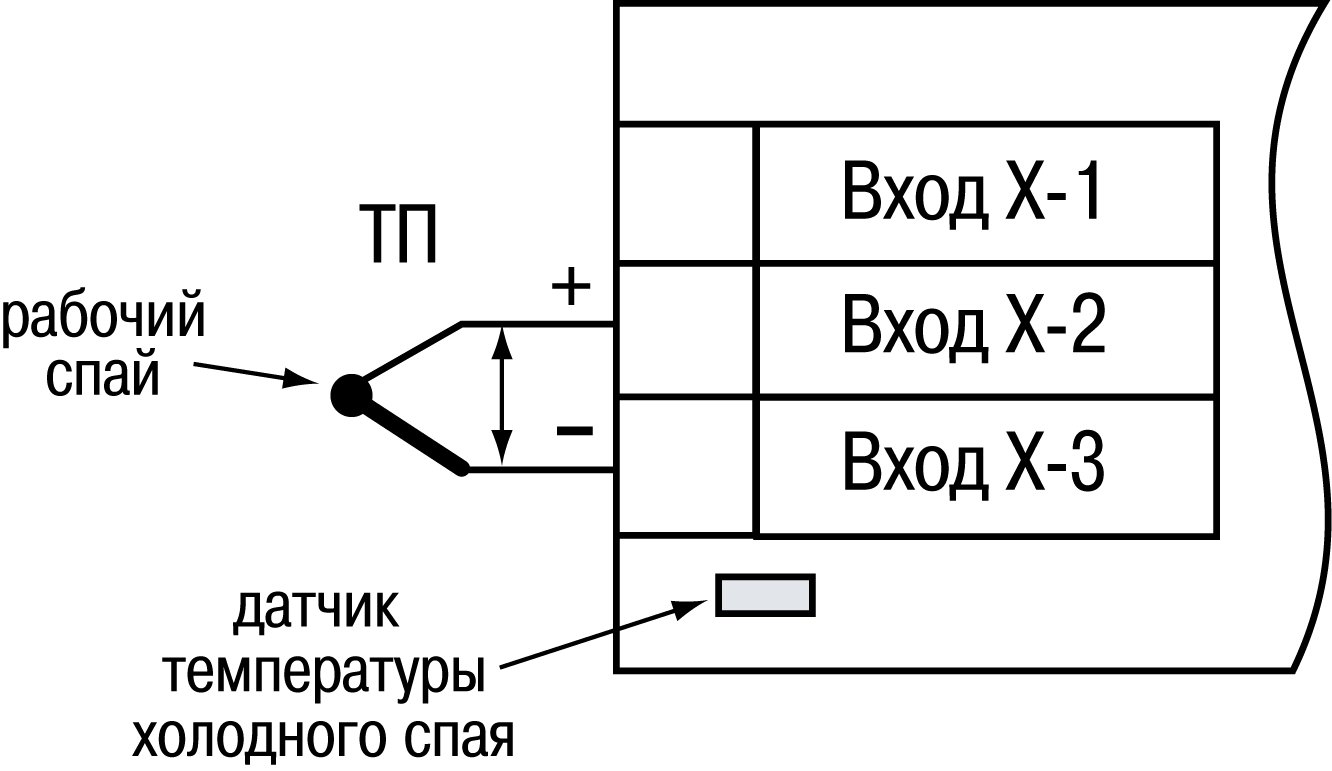
В приборе предусмотрена схема автоматической компенсации температуры свободных концов ТП. Датчик температуры «холодного спая» установлен рядом с клеммником прибора.
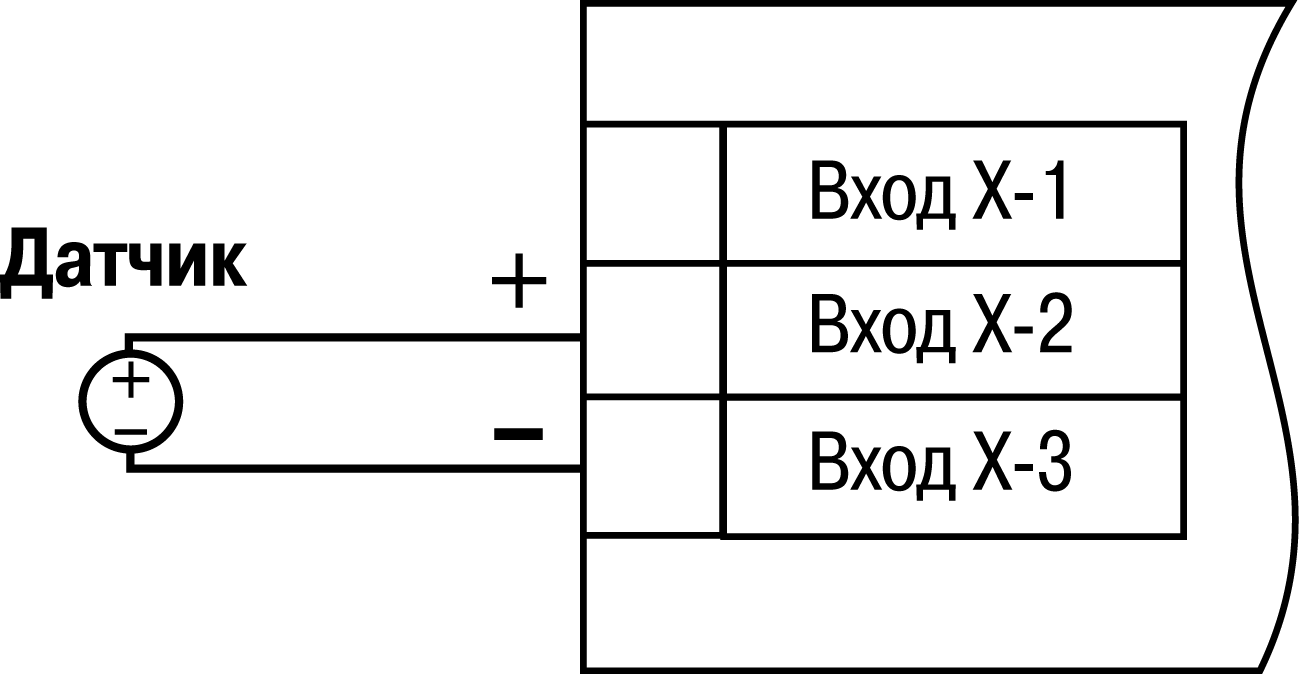
Подключение аналоговых датчиков
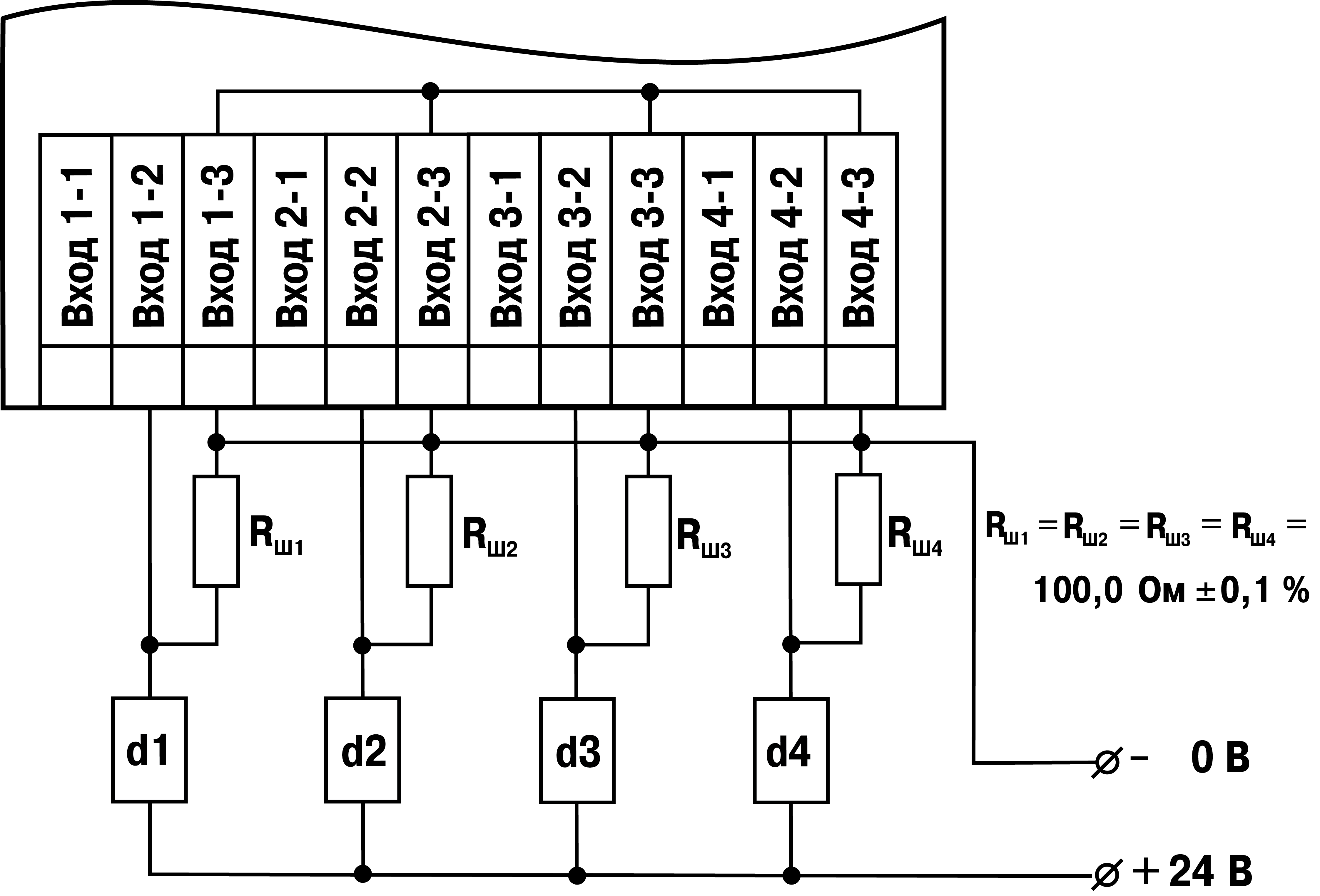
Схемы подключения датчиков с выходом в виде напряжения или тока приведены на рисунках ниже.
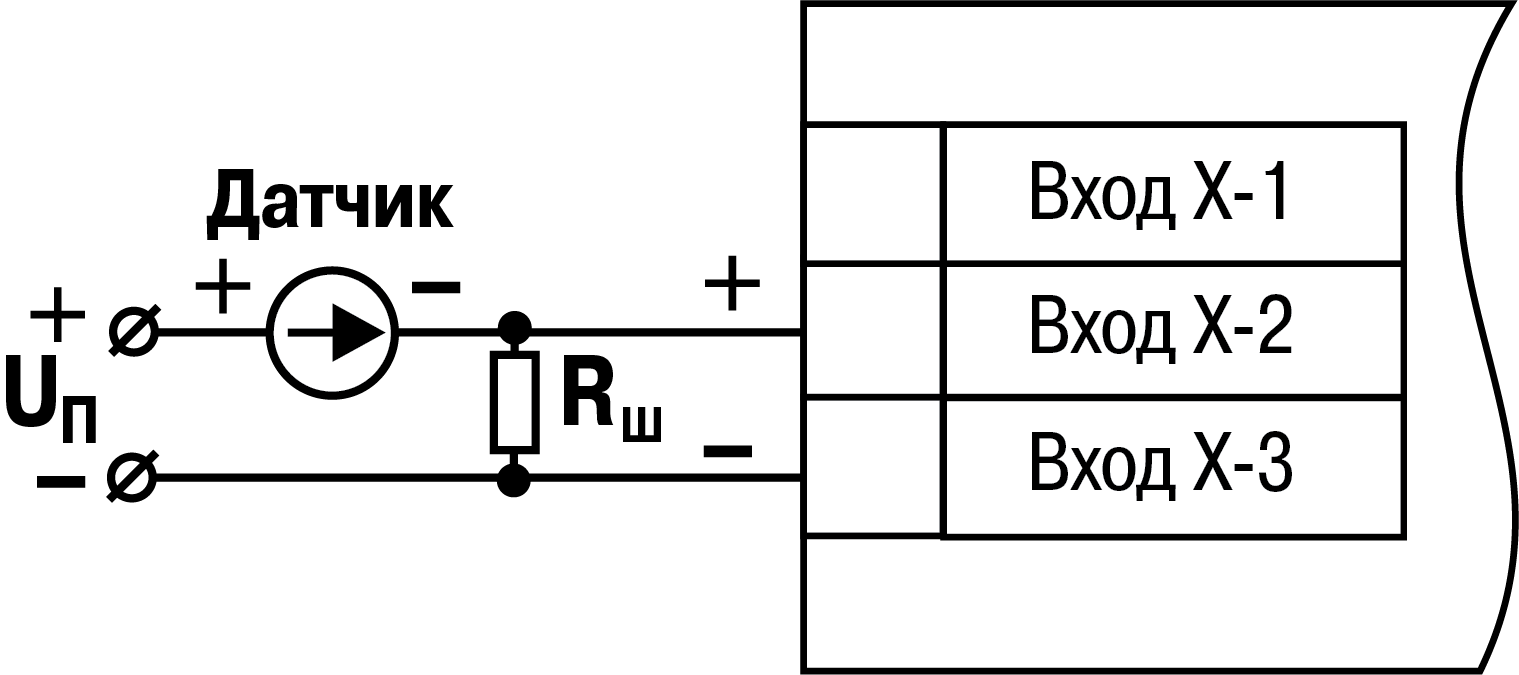
Подключение датчиков с выходом в виде тока (0...5,0 мА, 0...20,0 мА или 4,0…20,0 мА) следует выполнять только после установки шунтирующего резистора сопротивлением 100,0 Ом (допуск не более 0,1 %), который следует подсоединять в соответствии с рисунком ниже. Вывод резистора должен заводиться с той же стороны винтовой клеммы, что и провод от датчика. При использовании провода сечением более 0,35 мм конец провода и вывод резистора следует скрутить или спаять.
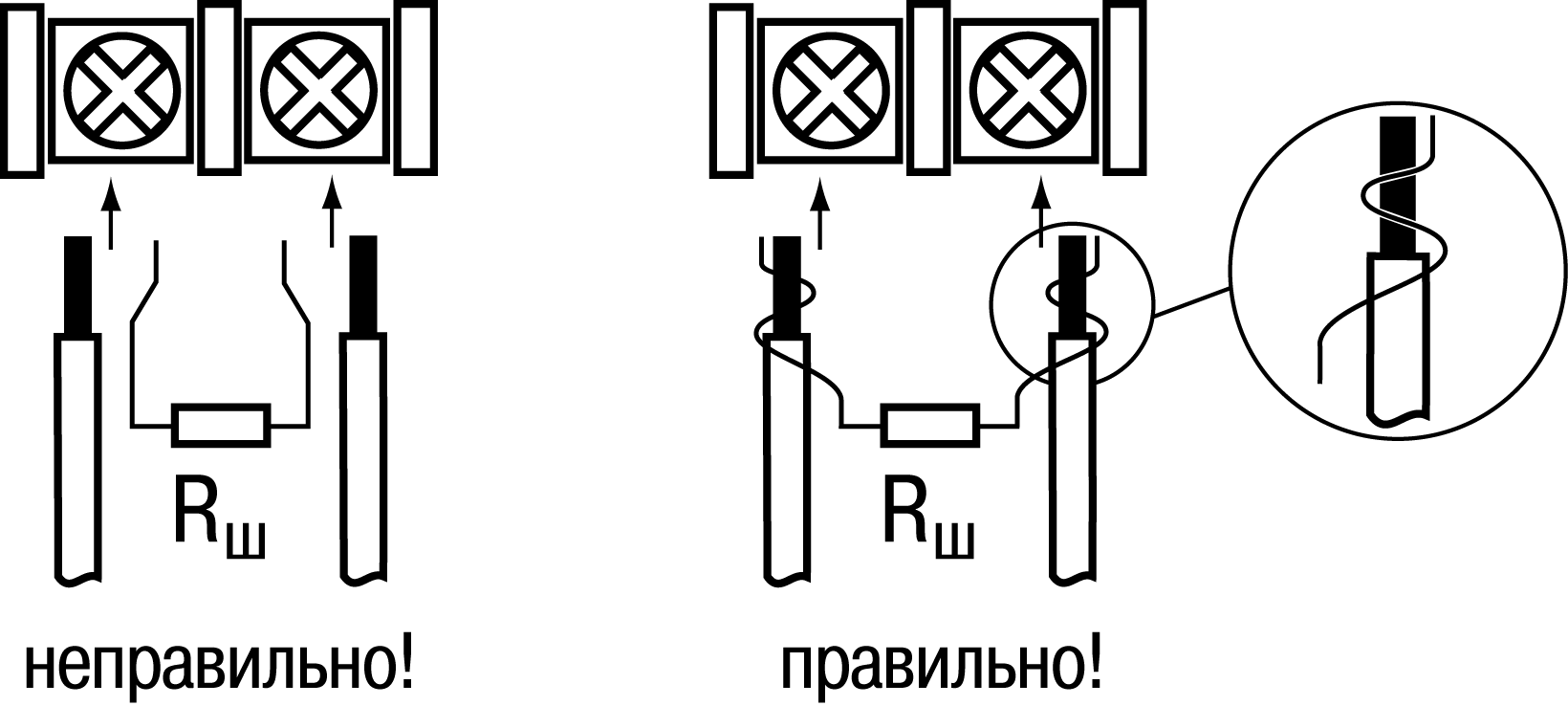
Невыполнение этого требования приведет к пропаданию контакта между выводом резистора и клеммы, что повлечет повреждение входа прибора!
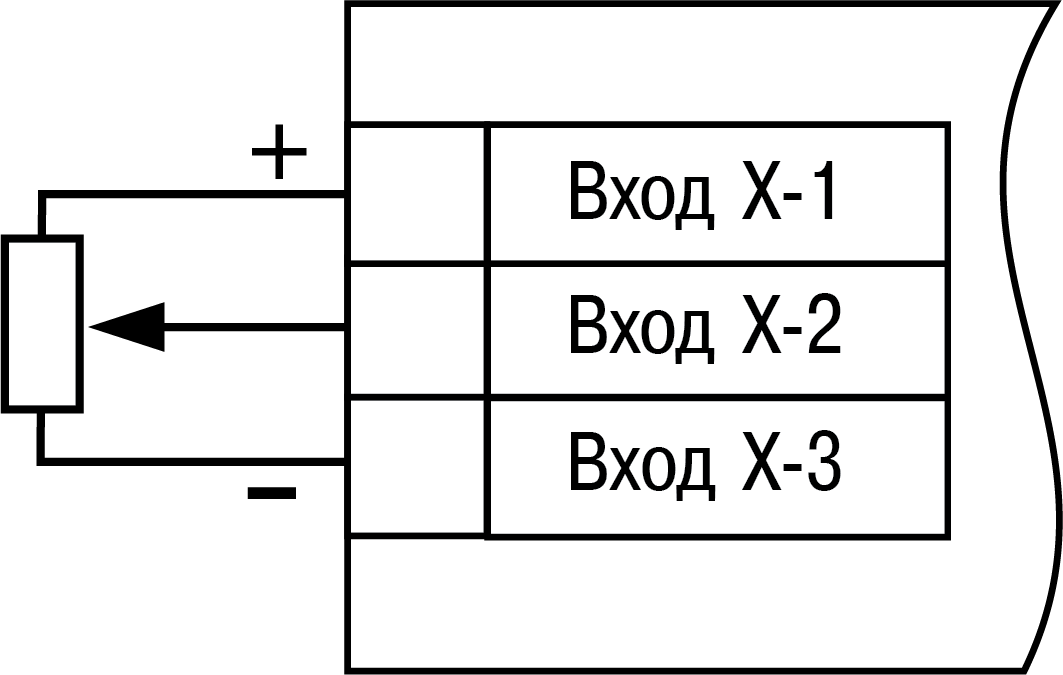
Подключение датчика положения задвижки
Схемы подключения датчика положения задвижки приведены на рисунках ниже.
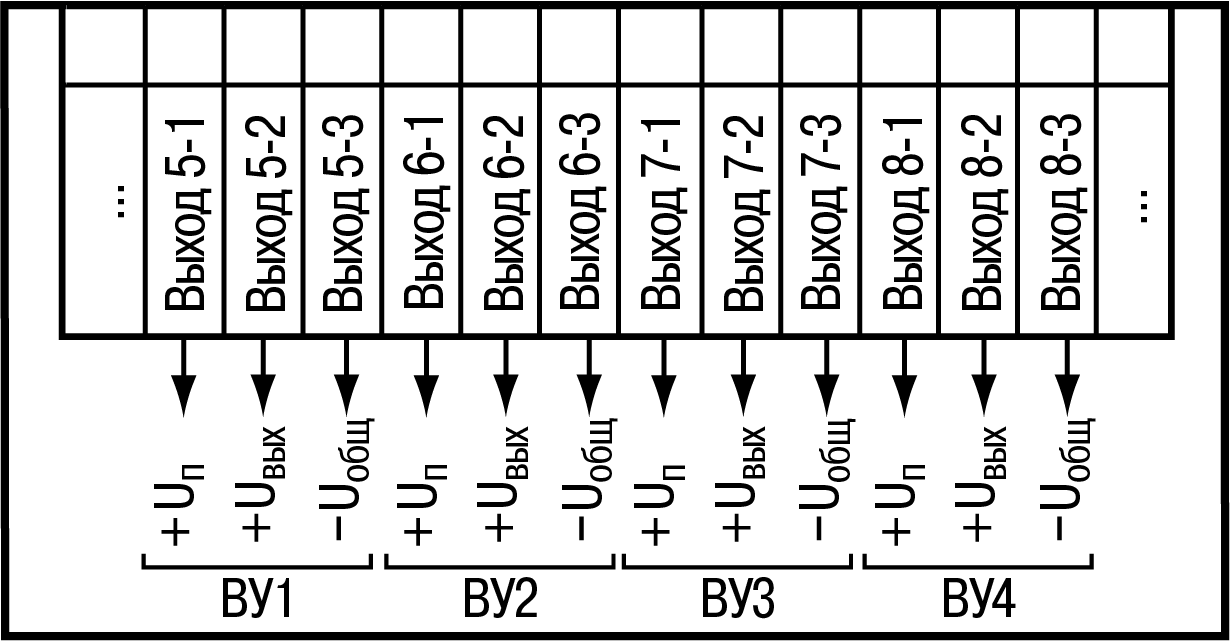
Подключение нагрузки к ВУ
Подключение нагрузки к ВУ типа Р
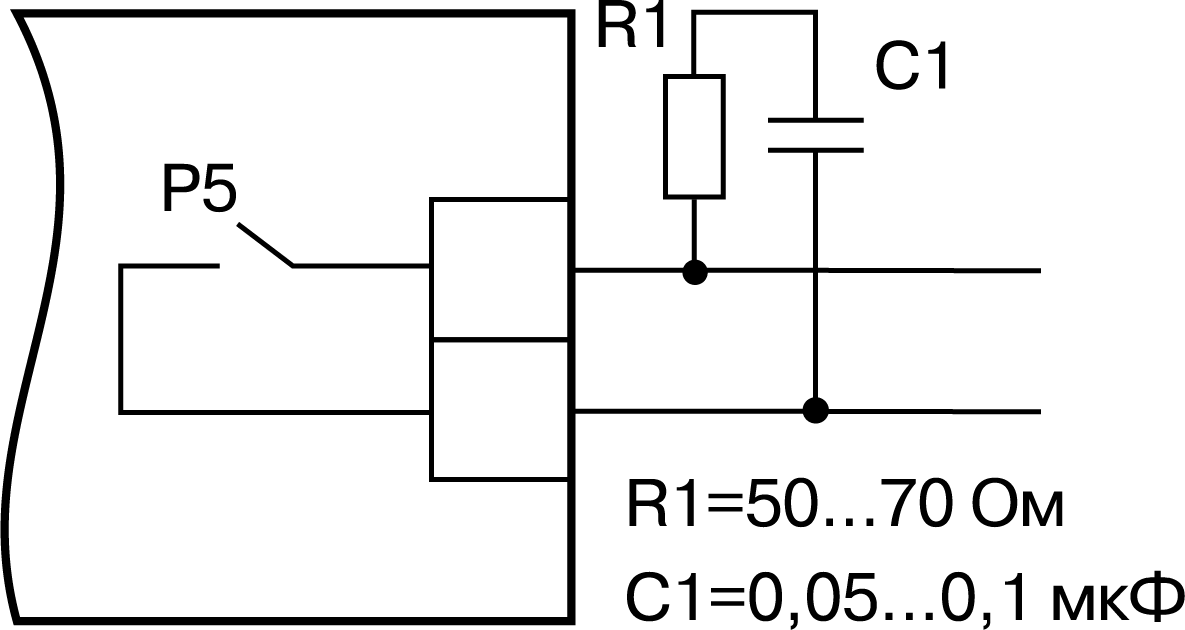
Для увеличения срока службы реле их контакты (особенно при коммутации нагрузок индуктивного характера) рекомендуется шунтировать искрогасящими RC-цепями.
Подключение нагрузки к ВУ типа К
U обр.макс > (2 - 3)·Uп.; Iпр.макс > (1,5 - 2)·Iср,
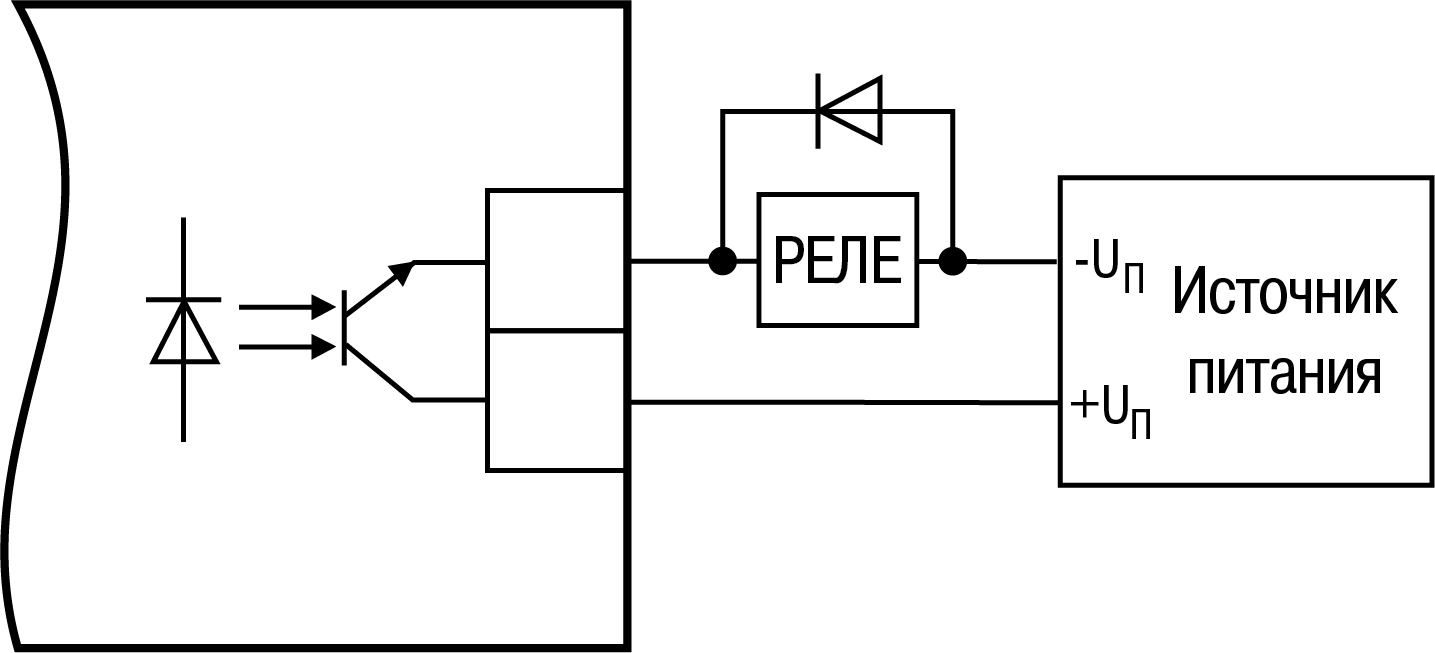
где U обр.макс – максимальное допустимое обратное напряжение на диоде;
Uп – напряжение питания реле;
Iпр.макс – максимальный допустимый прямой ток диода;
Iср – ток срабатывания реле.
Такое шунтирование обеспечивает защиту выходного транзистора оптопары от опасного воздействия ЭДС самоиндукции, возникающей на обмотке реле при ее коммутации.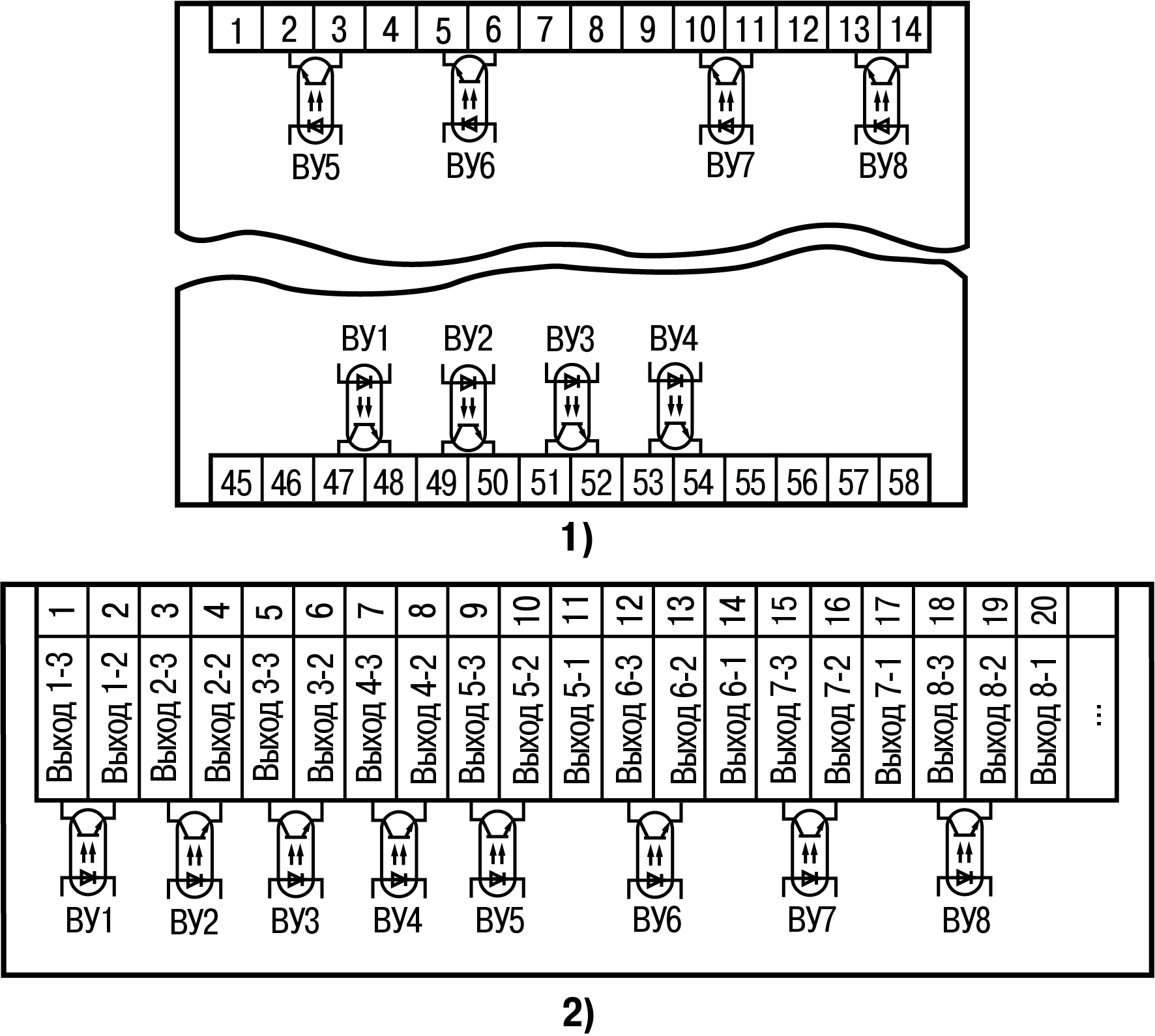
Подключение нагрузки к ВУ типа С
ВУ типа С имеет внутреннюю схему перехода через ноль и включается в цепь управления мощного симистора или пары встречно-параллельно включенных тиристоров через ограничивающий резистор R1 (см. рисунки ниже).
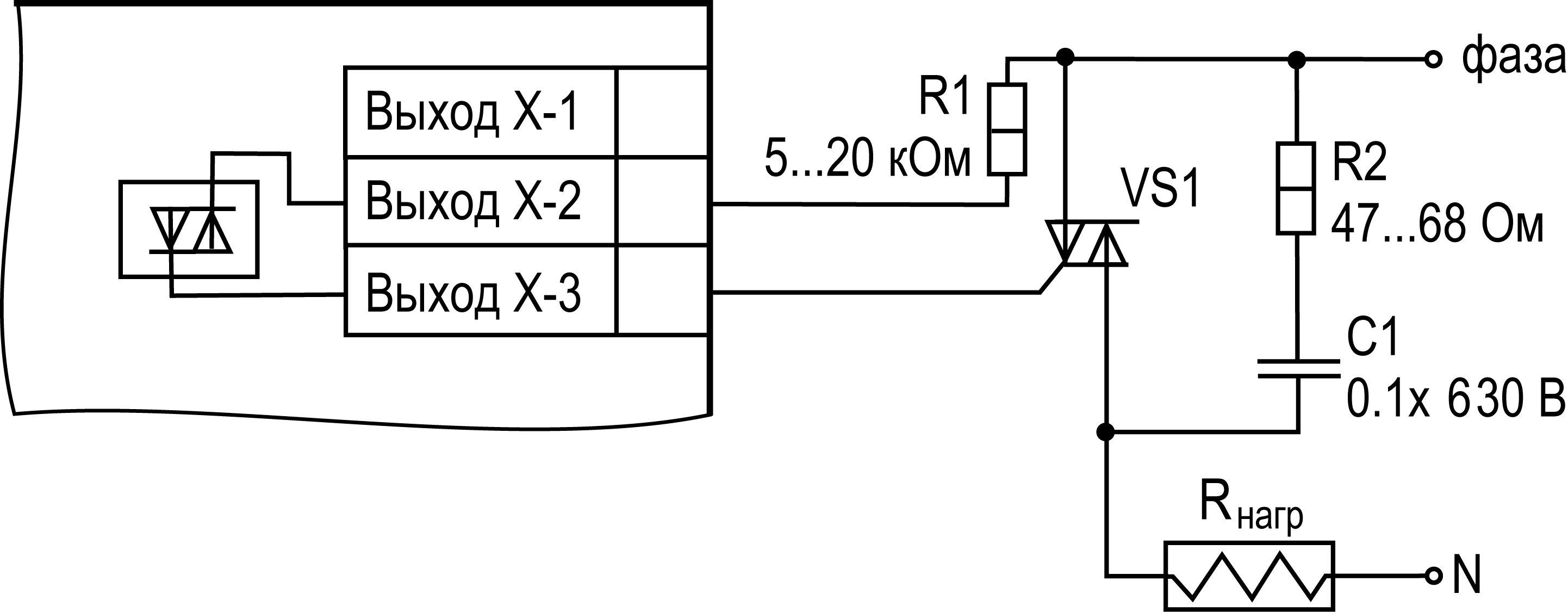
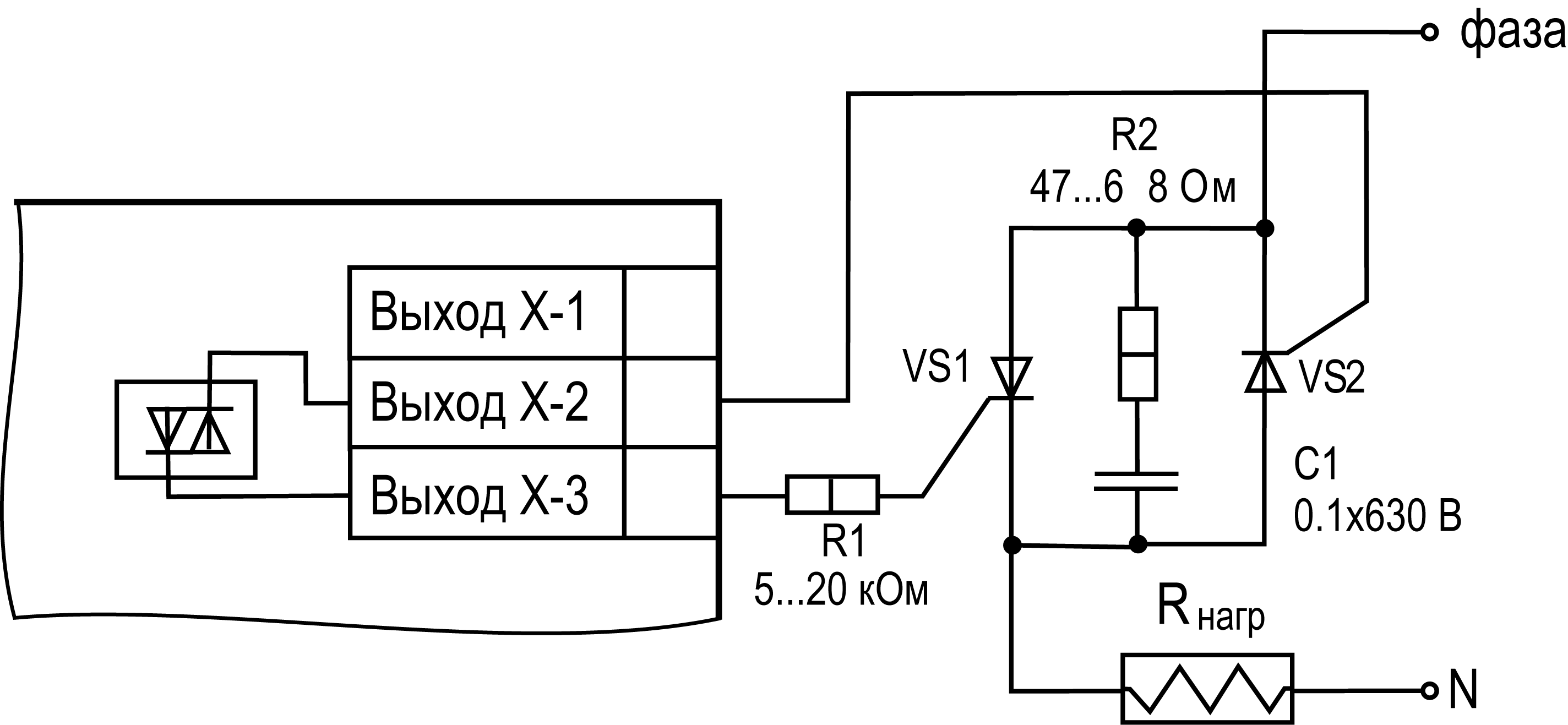
RC-фильтры предназначены для защиты элементов схемы от перепадов напряжения в сети.
Подключение нагрузки к ВУ типа Т
Выход «Т» имеет два состояния: с низким (от 0 до 1 В) и высоким (от 4 до 6 В) уровнем напряжения. В приборе используются выходы, выполненные на основе транзисторного ключа n-p-n–типа.
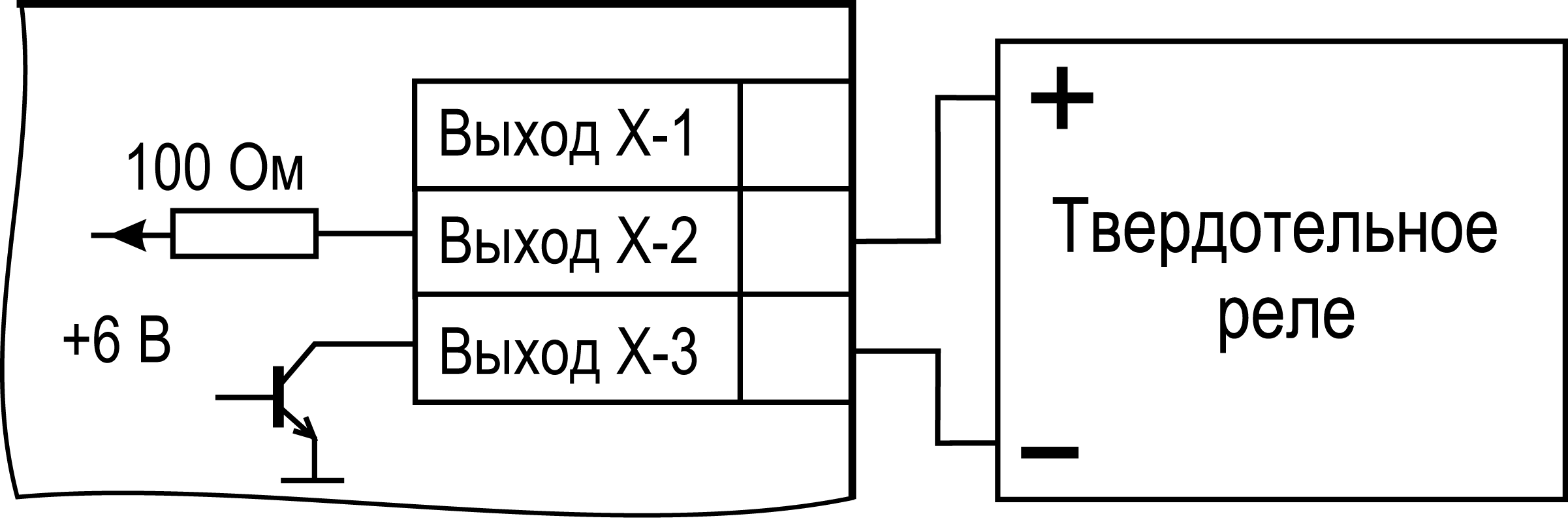
Выходной элемент не имеет гальванической изоляции. Гальваническую изоляцию обеспечивает само твердотельное реле.
Подключение нагрузки к ВУ типа И
Для нормальной работы прибора питание ЦАП должно осуществляться от независимого источника постоянного тока, который обеспечивает гальваническую развязку электрической схемы прибора и схемы подключаемого ИМ.
Напряжение источника питания рассчитывается по формулам:



где: Uип ном – номинальное напряжение источника питания, В;
Uип мин – минимальное допустимое напряжение источника питания, В;
Uип макс – максимальное допустимое напряжение источника питания, В;
Iцап макс – максимальный выходной ток ЦАП, мА;
Rнагр – сопротивление нагрузки ЦАП, кОм.
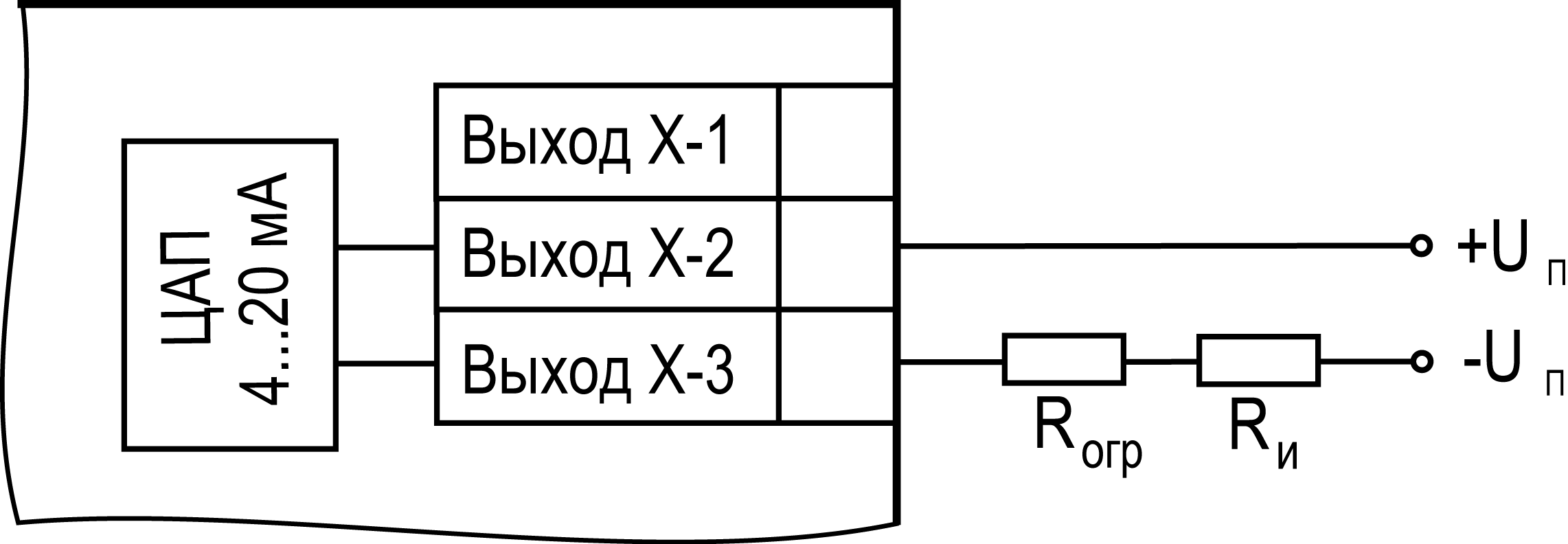
Если по какой-либо причине напряжение источника питания ЦАП превышает расчетное значение Uип.макс., то последовательно с нагрузкой необходимо включить ограничительный резистор, сопротивление которого рассчитывается по формулам:



где Rогр.ном. – номинальное значение ограничительного резистора, кОм;
Rогр.мин – минимальное допустимое значение ограничительного резистора, кОм;
Rогр.макс – максимальное допустимое значение ограничительного резистора, кОм;
Iцап макс – максимальный выходной ток ЦАП, мА;
Uип – напряжение источника, примененного для питания ЦАП, В.
В ряде случаев для питания ЦАП может быть использован встроенный в прибор источник постоянного тока 24 В, если он одновременно не задействован для питания активных датчиков. При использовании встроенного источника следует учитывать вышеизложенные требования.
Подключение нагрузки к ВУ типа У
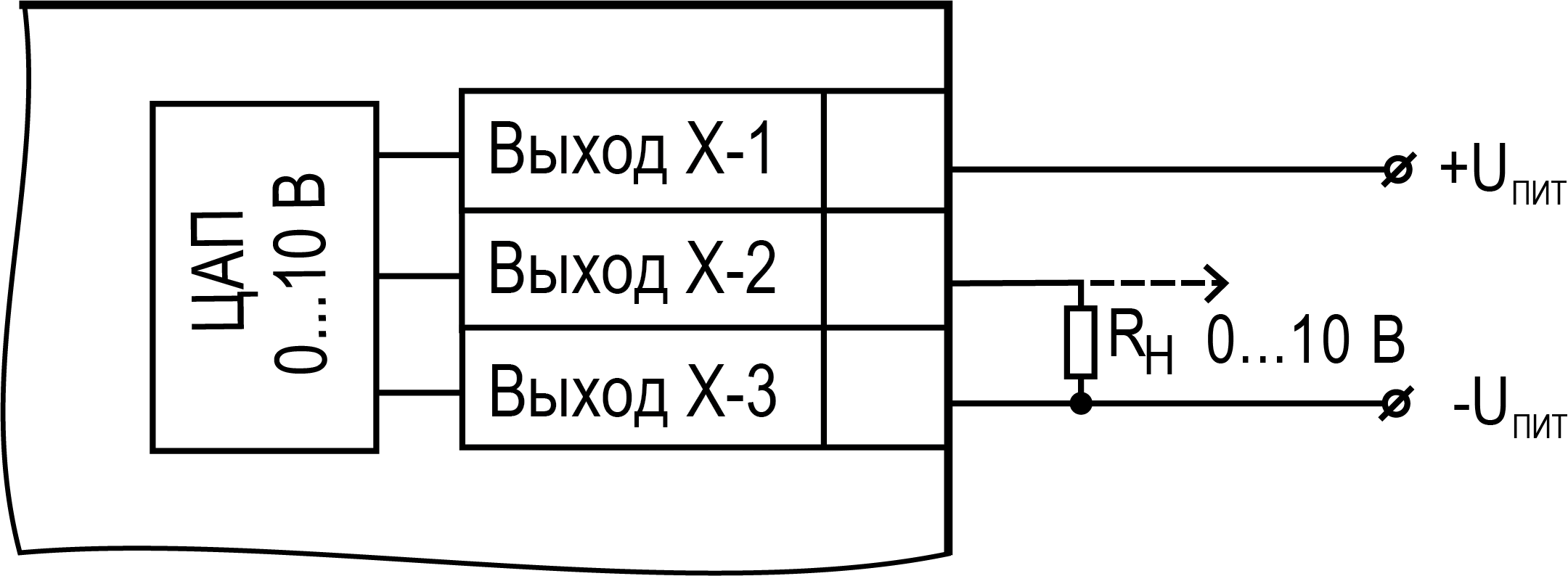
Сопротивление нагрузки Rн, подключаемой к ЦАП, должно быть не менее 2 кОм. Для питания ВУ можно использовать встроенный источник питания 24 В.
Подключение к RS-485
Прибор подключается к сети RS-485 с помощью экранированной витой пары. Длина линии связи не должна превышать 800 м.
Эксплуатация
Принцип работы
Общая функциональная схема прибора приведена на рисунке.
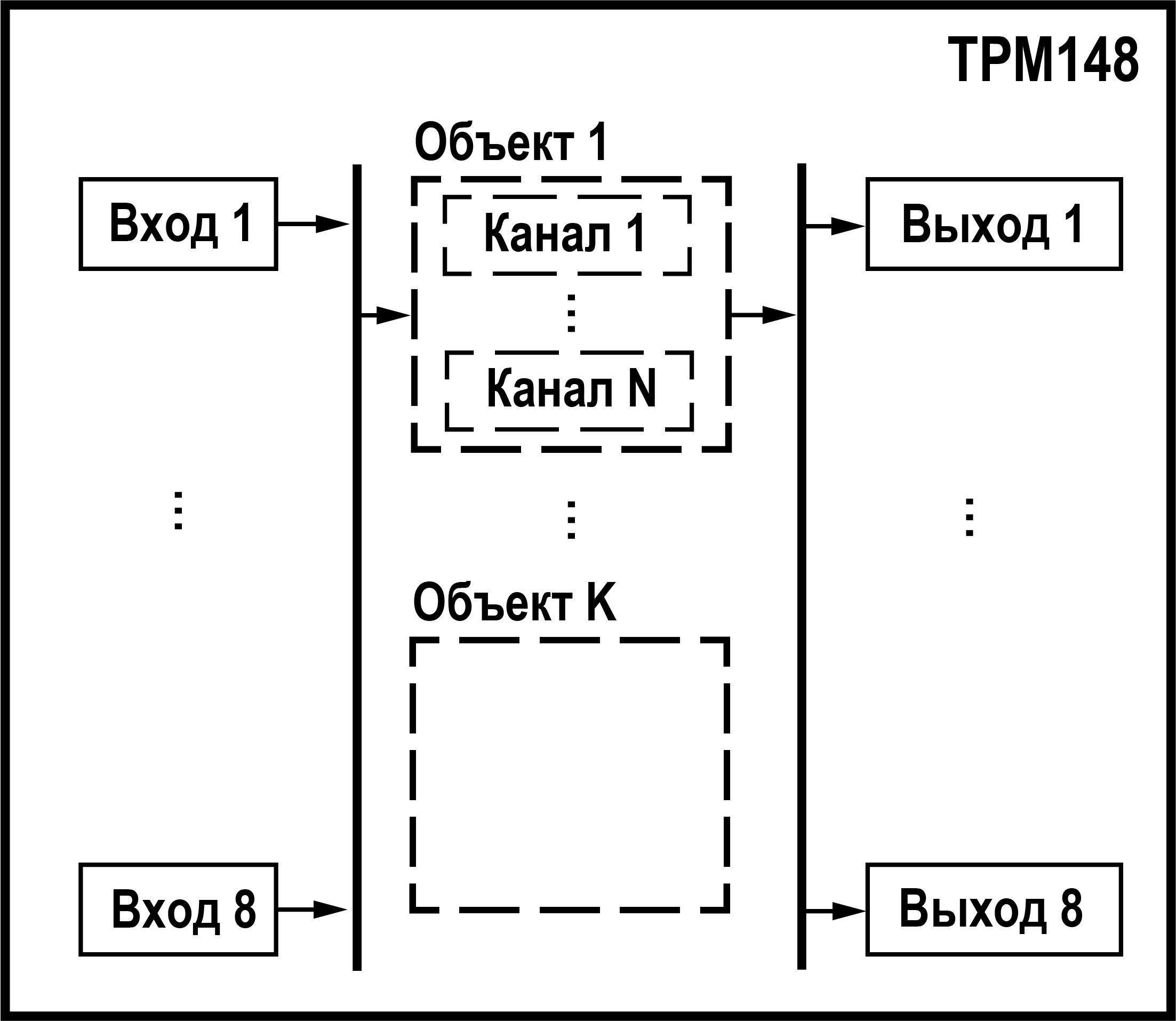
В состав прибора входят:
БУИМ (программный модуль для управления ИМ с помощью одного или нескольких ВЭ);
физические входы и выходы;
ВУ;
ЛУ;
программные модули;
каналы.
Толстыми вертикальными линиями на схеме обозначены селекторы, в которых могут быть заданы различные варианты связей между программными модулями. В Конфигурации, созданной пользователем, на месте селекторов появляются жесткие линии связи между программными модулями.
В приборе может быть до 8 объектов, общее количество каналов которых не превышает 8.
Все элементы прибора (регуляторы, вычислители, входные и выходные модули, и т. д.) являются автономными программными модулями.
Перед запуском прибора следует настроить конфигурацию и/или задать все необходимые параметры для программных модулей. Неиспользуемые программные модули не требуют настройки.
В приборе заложено несколько базовых Конфигураций, между которыми можно переключаться через меню (с лицевой панели) или с помощью «Конфигуратора».
Для изменения отдельных параметров прибора или для создания конфигураций, отличающихся от стандартных, используется программа-Конфигуратор ТРМ148, которая имеет доступ ко всем параметрам прибора.
Управление и индикация
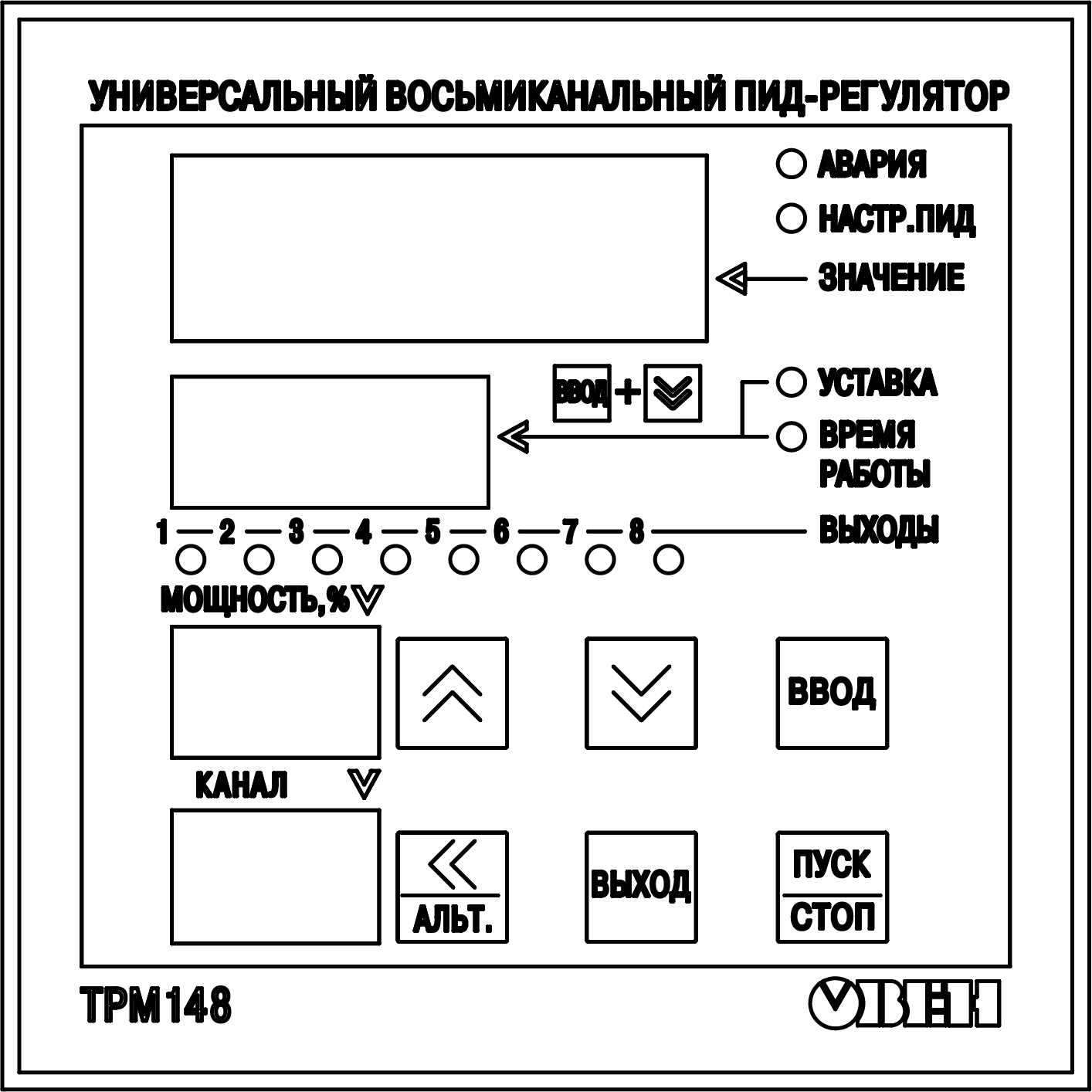
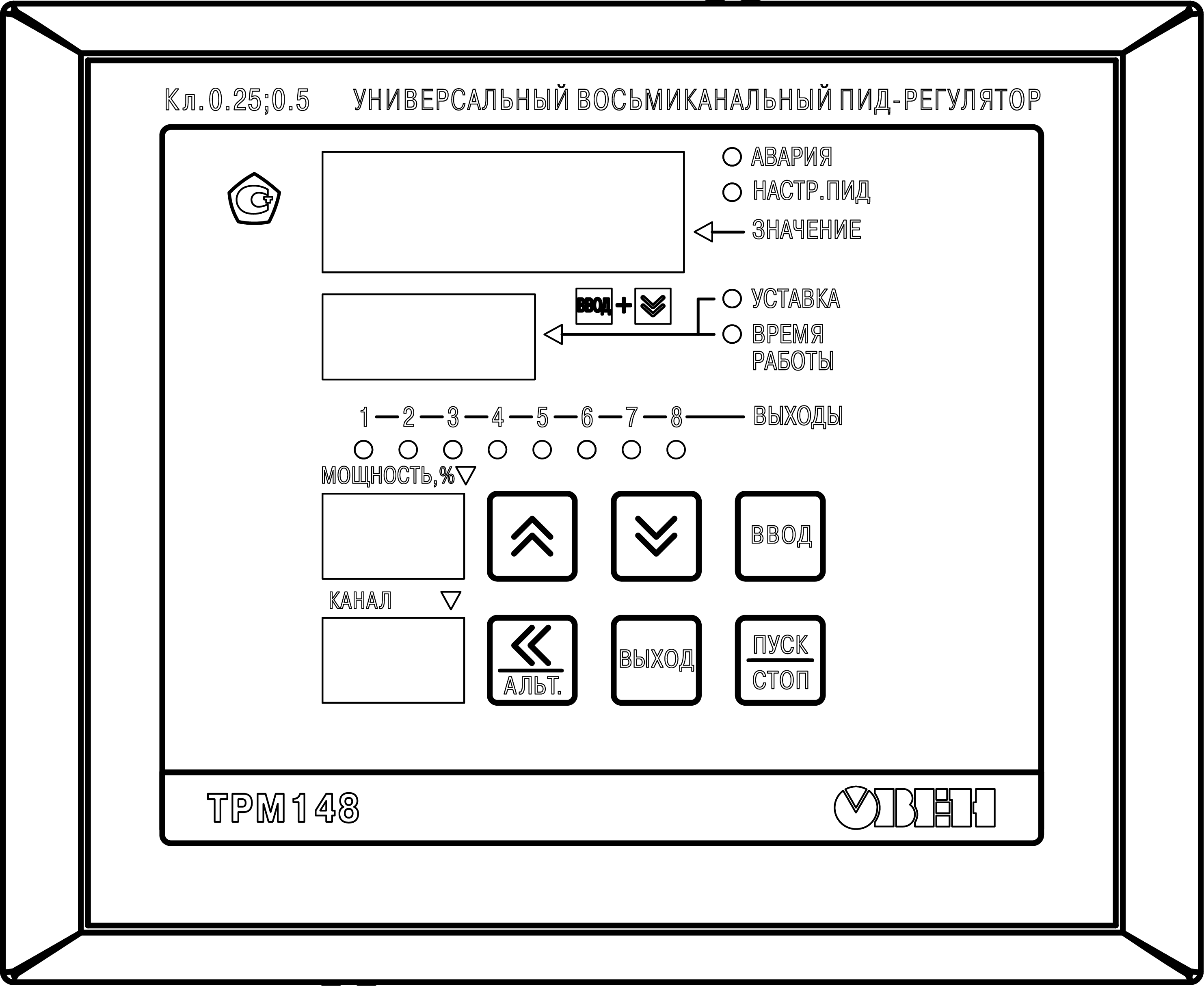
На лицевой панели прибора расположены элементы индикации и управления (см. рисунки далее):
ЦИ1...ЦИ4 (нумерация сверху вниз);
12 светодиодов;
6 кнопок.
Режимы работы ЦИ1...ЦИ4 подробно описаны в разделе.
Назначение светодиодов
Светодиод | Состояние | Назначение |
|---|---|---|
| АВАРИЯ | Светится | В канале возникла аварийная ситуация. Аварийная сигнализация включена. |
| НАСТР. | Светится | Происходит автоматическая настройка параметров ПИД-регулятора для одного из объектов |
| Уставка | Светится | На ЦИ2 отображается уставка |
| Время работы | Светится | На ЦИ2 отображается время |
| Выходы 1 ... 8 | Светится | Включено дискретное (ключевое) ВУ. При использовании аналоговых ВУ светодиоды не задействуются. |
Назначение кнопок
Кнопка | Назначение |
|---|---|
 | Переключение между режимами. Подтверждение записи данных. |

 | Изменение (увеличение/уменьшение) значений параметров. Смена канала. Одновременное нажатие включает/выключает циклическую смену каналов.. |
 | Сдвиг информации на ЦИ при его переполнении. Просмотр сообщения о типе аварийной ситуации. |
 | Нажатие < 1 с - переключение между режимами Работа и СТОП. Нажатие > 3 с – запуск/остановка индицируемого объекта. |
 | Выход из режимов без сохранения изменений. Выключение |
Функциональные назначения сочетаний кнопок:
- + —
переход в режим настройки.
- + + — включение/отключение
ручного управления мощностью в канале.
- + ( + )
— изменение параметра при ручном управлении мощностью.
- + + — принудительная перезагрузка прибора.
- + — запуск АНР ПИД.
- + — запуск юстировки.
- + + — возврат к стандартным сетевым
настройкам.
Включение и работа
При включении в сеть прибор переходит в тот режим, который задан в параметре Реакция после восстановления питания bEHV.
При первом включении прибор находится в режиме СТОП (регулирование остановлено).
Для того, чтобы начать (или остановить) регулирование, следует
нажать кнопку и удерживать ее в течение 2 - 3 с.
При запуске регулирования прибор начинает считывать и обрабатывать текущие измерения с подключенных датчиков и сразу показывает информацию о своей работе:
на ЦИ1 отображается значение с Вычислителя в текущем канале;
на ЦИ2 отображается текущая уставка (время работы, режимы STOP и Авария, код аварии) – между значениями для отображения можно переключиться комбинацией
и .ЦИ3 показывает мощность в канале;
на ЦИ4 отображаются номер объекта и канала через точку. Если объект единственный, то показан только номер канала.
Быстрый доступ к уставке
Для простого редактирования текущей уставки в ТРМ148 предусмотрен специальный режим – «Быстрый доступ к уставке».
Быстрый доступ к уставке
Действия | Реакция прибора |
|---|---|
Одновременно
нажаты кнопки | Прибор переходит в режим редактирования уставки для текущего канала (регулирование не останавливается). На ЦИ2 мигает редактируемое значение уставки. На других ЦИ отображаемые значения не меняются. |
Кнопками | Редактируемое значение на ЦИ2 мигает. |
Нажать
кнопку | Прибор выходит из режима редактирования уставки. |
Введенное значение уставки записывается в энергонезависимую память прибора.
При вводе значения уставки десятичная точка не сдвигается.
В режим быстрого редактирования уставки нельзя войти, если на ЦИ2 отображается значение времени.
Режим ручного управления выходной мощностью
В приборе есть возможность ручного управления выходной мощностью.
Для того, чтобы ручное изменение выходной мощности Регулятора стало доступным, следует снять блокировку режима Ручного управления. Для этого следует установить в параметре Ручное управление bL.rU значение «разрешено».
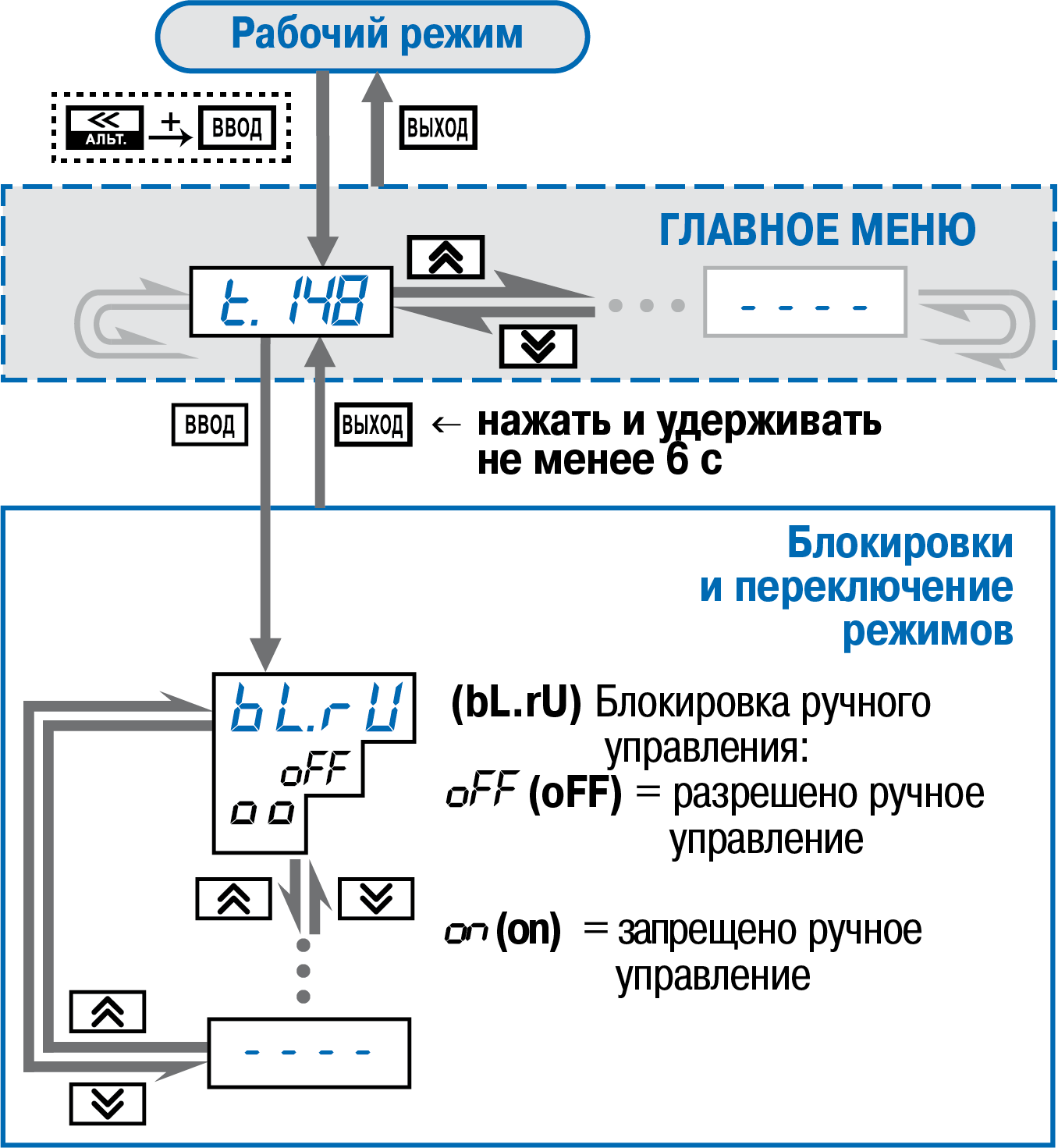
В режиме ручного управления выходной мощностью величина выходного сигнала:
ограничена диапазоном параметров P.UPr и P.min, если тип уставки в канале задан как «значение» (параметр P.SP);
не ограничена, если тип уставки задан как «мощность» (и ограничение величины выходного сигнала игнорируется).
Для управления выходной мощностью следует выполнить действия:
Выбрать кнопками
и канал для ручного
управления. Выбранный канал отображается на ЦИ4.Нажать комбинацию кнопок
+ + (порядок нажатия
важен) для перехода в режим Ручного управления выходной мощностью.
Значение выходной мощности на ЦИ3 начнет мигать.Задать требуемое значение выходной мощности с помощью кнопок:
+ — уменьшение значения, + — уменьшение значения. Редактируемое
значение выходной мощности (в %) мигает на ЦИ3.Для выхода из режима нажать комбинацию кнопок:
+ + . Значение выходной мощности перестанет мигать.
После задания выходной мощности для одного канала можно перейти к другому каналу и задать требуемую мощность, не выходя из режима ручного управления.
Состояния РАБОТА, СТОП и АВАРИЯ
Каждый Объект регулирования может находиться в одном из трех состояний:
Работа;
Стоп (StoP);
Авария (FAiL).
Состояния прибора СТОП и АВАРИЯ отображаются на ЦИ2 как STOP и FAIL (критическая АВАРИЯ) или ATTN (некритическая АВАРИЯ). В состоянии Работа на ЦИ2 показано значение уставки или времени.
Каждый из восьми Объектов в составе ТРМ148 может находиться в состояниях Стоп, Работа или Авария независимо от других.
В состоянии Работа Объекты производят регулирование.
В состоянии Стоп прибор поддерживает фиксированное значение мощности на ИМ, и ВУ можно отключать. Регулирование происходит по заданной уставке.
В состояние Авария Объект переходит при возникновении аварийной ситуации. В этом режиме также можно поддерживать фиксированное значение мощности на ИМ. При нажатии кнопки «Альт» на приборе на ЦИ2 выводится сообщение о типе аварийной ситуации.
Информационные сообщения на ЦИ
В процессе работы прибор выводит на цифровые индикаторы информационные сообщения, список которых представлен в таблице ниже.
Список информационных сообщений на ЦИ
Сообщение | ЦИ, на котором отображается сообщение | Описание сообщения | Способы устранения |
|---|---|---|---|
| Ошибки измерения (текущего канала) | |||
| No.dt | ЦИ1 | Нет данных измерения | Подождать 3…5 с |
| Off | ЦИ1 | Датчик отключен | Включить датчик в параметре in-t |
| OcL.L | ЦИ1 | Температура холодного спая ниже заданного диапазона | 1) Привести температуру прибора/объекта в соответствие с техническими требованиями. 2) Возникла ошибка юстировки датчика. Выполнить юстировку повторно. 3) Возникла аппаратная ошибка. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| OcL.h | ЦИ1 | Температура холодного спая выше заданного диапазона | |
| HHHH | ЦИ1 | Вычисленное значение выходит за верхнюю границу диапазона | 1) Установить тип датчика, соответствующий реально подключенному. 2) Проверить подключение датчика к прибору. 3) Заменить неисправный датчик. 4) Выбрать датчик с диапазоном температуры, который будет подходить для требуемых измерений. 5) Возникла аппаратная ошибка. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| LLLL | ЦИ1 | Вычисленное значение выходит за нижнюю границу диапазона | 1) Установить тип датчика, соответствующий реально подключенному. 2) Проверить подключение датчика к прибору. 3) Заменить неисправный датчик. 4) Выбрать датчик с диапазоном температуры, который будет подходить для требуемых измерений. 5) Возникла аппаратная ошибка. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| 0.0.0.0. | ЦИ1 | Короткое замыкание (данная индикация не возникает при КЗ с датчиком на входе типа «термопара» или «унифицированный датчик по напряжению и току») | 1) Устранить замыкание на входе прибора. 2) Проверить подключение датчика к прибору. 3) Изменить тип датчика в параметре in-t. 4) Заменить неисправный датчик. 5) Возникла аппаратная ошибка. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| - - - - | ЦИ1 | Обрыв датчика (данная индикация не возникает при обрыве «унифицированного датчика по напряжению и току») | 1) Подключить требуемый датчик к входу. 2) Проверить подключение датчика к прибору. 3) Изменить тип датчика в параметре in-t. 4) Заменить неисправный датчик. 5) Возникла аппаратная ошибка. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| Ad.Er | ЦИ1 | Отсутствие связи с АЦП
| Возникла аппаратная ошибка. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| CLbr | ЦИ1 | Некорректный калибровочный коэффициент
| 1) Провести юстировку датчика. 2) Провести юстировку повторно и сохранить корректный коэффициент. 3) Обратиться в сервисный центр. |
| RES | ЦИ1 | Зарезервировано
| Возникла аппаратная ошибка. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| Сообщения юстировки | |||
| cL.nr | ЦИ1 | Юстировка проведена успешно | Нажать кнопку ВВОД для записи коэффициентов. |
| S.tYP | ЦИ1 | Неправильный тип входа. Во время юстировки положения задвижки установлен тип датчика, не являющийся датчиком положения задвижки. | Установить тип датчика, соответствующий реально подключенному. |
| CLb.0 | ЦИ1 | Ошибка при проведении юстировки. Попытка проведения юстировки датчика холодного спая до проведения общей юстировки | Возникла аппаратная ошибка. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| Ch.no | ЦИ1 | Неправильно выбран тип юстировки | При попытке калибровки с ПК передан неверный тип юстировки. Перезапустить конфигуратор или устранить ошибки в сторонней программе, которую использовали для юстировки датчиков. |
| UUUU | ЦИ1 | Во время юстировки было отключено питание прибора | Выполнить юстировку повторно. |
| S.Err | ЦИ1 | Ошибка сохранения коэффициентов юстировки | Произошла ошибка записи в EEPROM. Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| Ошибки вычислителя | |||
| E.n.in | ЦИ1 | Неверное количество входов | 1) Установить верный тип вычислителя cal.t 2) Установить верное количество входов n.in.c |
| i.OFF | ЦИ1 | Отключен вход вычислителя. | Провести инициализацию и конфигурирование прибора заново. |
| d.oFF | ЦИ1 | Отключен вход вычислителя | Подключить необходимый датчик к входу вычислителя. Установить тип датчика в параметре in.t. |
| L.tS | ЦИ1 | Температура сухого термометра в вычислителе влажности выходит за нижнюю границу допустимого диапазона | 1) Установить тип датчика, соответствующий реально подключенному. 2) Проверить контакт на датчике сухого термометра. 3) Проверить подключение датчика сухого термометра. 4) Заменить неисправный датчик влажности. 5) Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| h.tS | ЦИ1 | Температура сухого термометра в вычислителе влажности выходит за верхнюю границу допустимого диапазона | |
| L.toi | ЦИ1 | Температура влажного термометра в вычислителе влажности выходит за нижнюю границу допустимого диапазона | 1) Установить тип датчика, соответствующий реально подключенному. 2) Проверить контакт на датчике влажного термометра. 3) Проверить подключение датчика влажного термометра. 4) Заменить неисправный датчик влажности. 5) Перезапустить прибор. Если сообщение появляется снова, следует обратиться в сервисный центр. |
| h.toi | ЦИ1 | Температура влажного термометра в вычислителе влажности выходит за верхнюю границу допустимого диапазона | |
| cL.oF | ЦИ1 | Вычислитель отключен | 1) Включить Вычислитель в параметре cal-t 2) Следует учитывать, что при использовании некоторых конфигураций прибора вычислитель должен быть отключен. |
| nEGt | ЦИ1 | На входе вычислителя квадратного корня отрицательное значение | Обеспечить всегда положительное значение на входе вычислителя: проверить правильность подключения средств измерения, направляющих информацию на вход вычислителя и т. п. При извлечении корня из отрицательной величины на ЦИ выводится nEGt. |
| i.dat | ЦИ1 | Неверный индекс датчика | Ошибка конфигурации. Проверить параметры in. всех используемых входов вычислителя. |
| i.FLt | ЦИ1 | Неверный индекс сетевого фильтра | |
| Информационные сообщения | |||
| STOP | ЦИ2 | Прибор находится в состоянии СТОП | Характеристика варианта состояния прибора. |
| FAIL | ЦИ2 | Прибор находится в состоянии АВАРИЯ | Для перехода в состояние СТОП нажать кнопку |
| ATTN | ЦИ2 | Прибор находится в состоянии Некритической аварии (надпись появляется каждые 2 с) | Проверить правильность подключения датчиков измерения и соответствие применяемого датчика установленному в Конфигураторе типу датчика (параметр in-t). |
| PR.SP | ЦИ2 | Задана Уставка типа «мощность» | Характеристика варианта работы прибора. |
| NO.CA | ЦИ1 | Канал регулирования отключен | Характеристика варианта работы прибора. |
| 00. (точка мигает) | ЦИ3 | Выходная мощность 100 % (отображение на двухсимвольном индикаторе). Точка может также мигать, если показывается отрицательное значение. | Характеристика варианта работы прибора. Нажать кнопку |
| Ch | ЦИ3 | Информирование об индикации номера канала на ЦИ4 | Просмотреть сообщение на ЦИ4 |
| St | ЦИ3 | Информирование об индикации номера состояния прибора на ЦИ4 | |
| C.E | ЦИ3 | Неправильно собран канал | Задать правильную конфигурацию прибора |
| Err | ЦИ1 или ЦИ2 | Ошибки различного рода | См. раздел |
| - - | ЦИ3 | В канале нет выходного устройства, отсутствует выходная мощность | Не предпринимать ничего, если для данной конфигурации требуется отключение ВУ |
| - - - - | ЦИ2 | В канале не задана уставка | Характеристика варианта работы прибора. |
| CFG | ЦИ1 | Прибор не сконфигурирован | Задать конфигурацию прибора |
| c.o | ЦИ1 | Неправильно собран канал | Задать правильную конфигурацию прибора |
Сетевой интерфейс RS-485
В случае использования сетевого интерфейса возможно:
конфигурирование прибора с ПК;
запись параметров текущего состояния на ПК.
Для подключения к сети RS-485 следует задать сетевые параметры регулятора. В одной сети могут находиться несколько приборов, подключенных к одному ПК. Для обеспечения корректной работы сетевые параметры всех приборов одной сети должны быть одинаковы (за исключением уникального базового адреса).
Список параметров, доступных по интерфейсу RS-485 приведен в Приложении В.
Протоколы обмена
Прибор работает в сети RS-485 по протоколам ОВЕН, Modbus-RTU (Slave), Modbus-ASCII (Slave).
Тип протокола определяется прибором автоматически.
Прибор не является Мастером сети, поэтому в сети RS-485 должен быть Мастер сети. В качестве Мастера сети могут использоваться ПЛК, ПК с подключенным преобразователем RS-232/RS-485 (например, АСЗ-М) или USB/RS-485 (например, АС4).
Прибор конфигурируется с ПК через адаптер интерфейса RS-485/RS-232
или RS-485/USB с помощью программы «Конфигуратор ТРМ148», которую
можно скачать с сайта
Работа с параметрами по протоколу ОВЕН
Параметры в приборе разделяются на две группы: настраиваемые и оперативные. Значения настраиваемых параметров задаются кнопками на лицевой панели прибора или через сетевой интерфейс (например, с помощью программы «Конфигуратор ТРМ148»).
Значения настраиваемых параметров хранятся в энергонезависимой памяти прибора и сохраняются при выключении питания. Оперативные параметры – это данные, которые прибор получает или передает по сети RS-485. Оперативные параметры отражают текущее состояние регулируемой системы.
Работа протокола Modbus с параметрами прибора
Прибор работает по протоколу Modbus в режимах ASCII (Slave) или RTU (Slave). При работе по протоколу Modbus можно считывать и записывать значения оперативных параметров из памяти прибора.
Реакция прибора на случайное отключение напряжения питания
Реакция на случайное отключение питания определяется параметром bEHV, который может принимать следующие значения:
«Продолжить с того же места». При выключении питания прибор сохраняет информацию о своем состоянии в течение примерно 1 минута и 30 секунд и после включения питания продолжает работу с того же места. Если до выключения питания прибор находился в состоянии СТОП или АВАРИЯ, то это же состояние сохранится после включения питания. Если напряжение питания отсутствовало более долгое время и информация о состоянии была утеряна, то прибор переходит в состояние СТОП.
«Перейти в состояние РАБОТА». Независимо от того, в каком состоянии прибор находился до пропадания питания, при появлении напряжения он перейдет в состояние Работа.
«Перейти в состояние СТОП». Прибор переходит в состояние СТОП.
«Перейти в состояние АВАРИЯ». Прибор переходит в состояние АВАРИЯ.
Прибор подсчитывает количество отключений питания и ручных перезагрузок (параметр 220), а также общее количество пересбросов (параметр rES), которые могут происходить при отсутствии питания в течение длительного периода времени или по иной причине. Причину последнего пересброса можно посмотреть в параметре r.SrC.
Значения параметров 220 и rES доступны только для просмотра. Их можно обнулить, но задать какое-либо ненулевое значение нельзя.
Конфигурационные параметры могут храниться в энергонезависимой памяти прибора в течение нескольких десятков лет.
Принудительная перезагрузка прибора
Прибор можно перезагрузить принудительно, если он начал в каких-либо режимах работать некорректно (например, при сильных помехах или после длительного пропадания питания).
Для перезагрузки прибора следует одновременно нажать кнопки + +
Рекомендуется перезагружать прибор после смены модификации или после записи нестандартной конфигурации.
Модификации прибора
Прибор выпускается с шестью заложенными в него (записанными в энергонезависимую память) типовыми модификациями, которые упрощают конфигурирование прибора Основная часть необходимых параметров уже правильно задана в этих модификациях.
После выбора модификации следует задать значения остальных параметров прибора. Это можно сделать кнопками с передней панели, однако рекомендуется использовать программу «Конфигуратор ТРМ148». Программа «Конфигуратор ТРМ148» позволяет полностью конфигурировать прибор, дополнить модификацию для корректной работы прибора.
Модификация прибора сменяется:
с помощью программы «Конфигуратор ТРМ148» на полном уровне доступа:
записью в прибор соответствующего файла, поставляемого на диске вместе с прибором;
инициированием команды «Смена модификации»;
с лицевой панели прибора.
Для того, чтобы сменить модификацию с помощью кнопок, следует перейти в главное меню прибора. В «Главное меню\CONF» расположены шесть модификаций. При выборе, например, «Главное меню\CONF\CONF1» в прибор будет установлена Модификация 1 (весь набор параметров).
Из-за того, что ВЭ определенного типа нельзя перечислить в произвольном порядке, может возникнуть необходимость переподключить ВЭ к БУИМ или Инспекторам. Данную задачу можно выполнить быть выполнена с помощью программы «Конфигуратор ТРМ148» или с помощью кнопок на лицевой панели.
Схемы стандартных модификаций приведены для прибора, укомплектованного восемью ВЭ типа «Р».
В ТРМ148 есть возможность создать индивидуальную конфигурацию, сочетающую в себе элементы разных модификаций. Можно сделать это самостоятельно или воспользоваться услугами компании ОВЕН, обратившись по адресу support@owen.ru.
Для создания собственной конфигурации следует воспользоваться программой «Конфигуратор ТРМ148» с полными правами доступа. Перед созданием собственной конфигурации следует тщательно изучить данное Руководство для ТРМ148.
Для создания индивидуальной модификации программа использует Модификацию 0. Модификация 0 предназначена для полной инициализации всех конфигурационных параметров прибора.
Описание модификации 1
В состав Модификации 1 входят 8 Каналов регулирования, каждый из которых подключен к своему ВУ.
Схема модификации 1 представлена на рисунке.
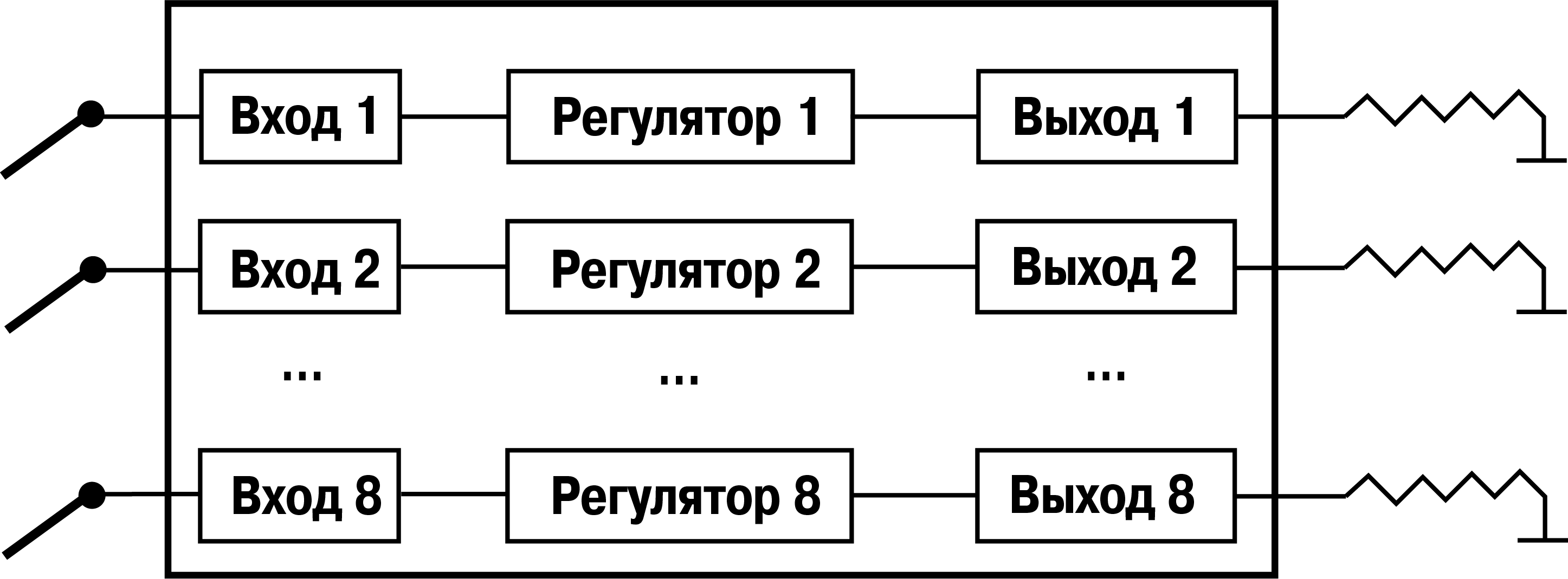
Каждый Регулятор может работать в режимах ПИД и ON/OFF.
Модификация 1 предназначена для работы с «нагревателями».
Данная модификация позволяет одновременно регулировать несколько (от 1 до 8) независимых физических величин. Это могут быть температура, давление, влажность, освещенность и др. величины, измеряемые одним датчиком или передаваемые в виде стандартных аналоговых сигналов (тока или напряжения).
Регулирование задается уставкой – постоянной или изменяемой по времени величиной (графиком).
Пример
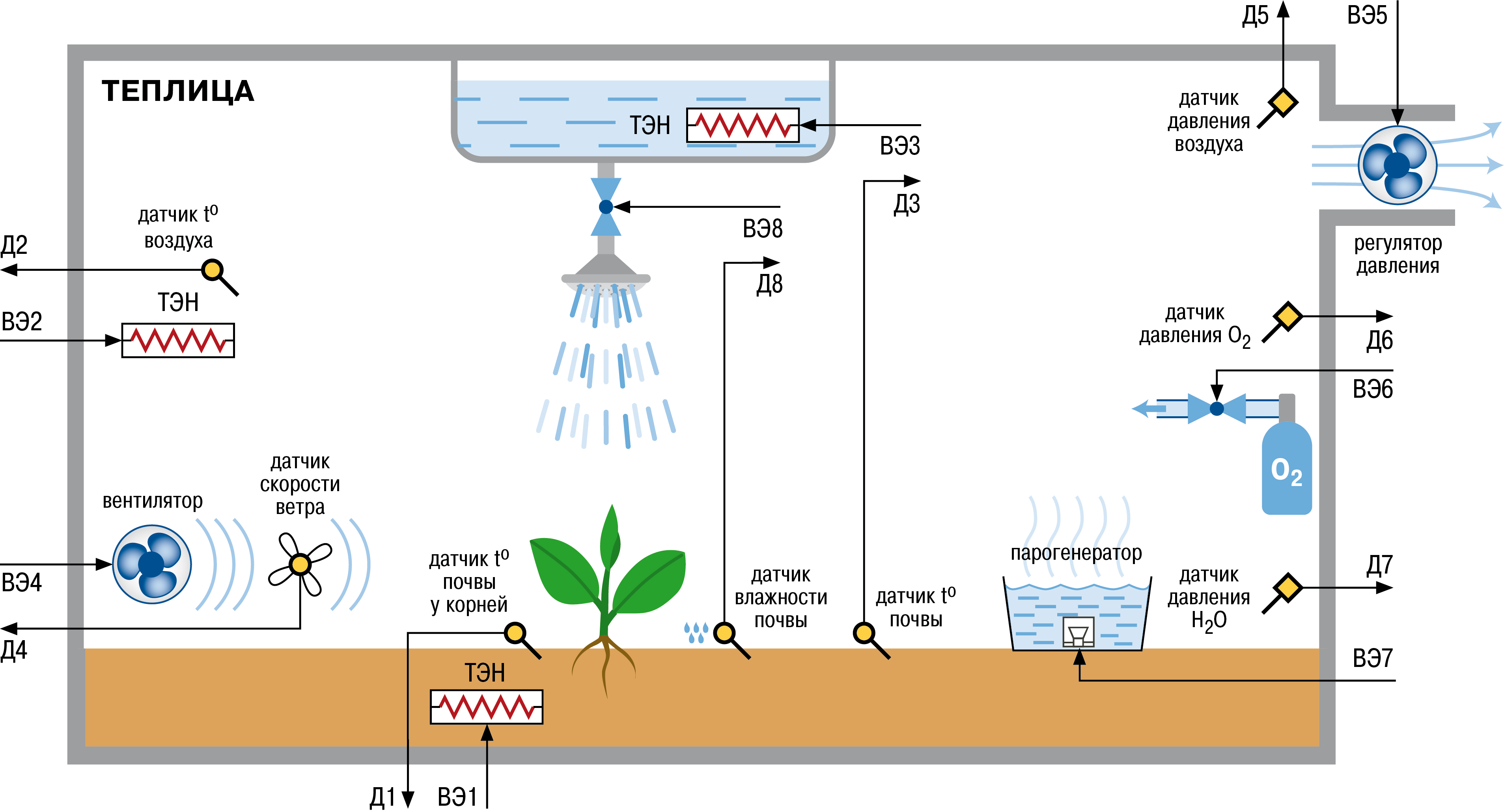
Прибор модификации 1 можно использовать для поддержания в необходимых диапазонах величин параметров жизнедеятельности теплицы для испытания выживаемости растений. В теплице требуется поддерживать в заданных диапазонах значений следующие конкретные параметры:
температура почвы вокруг корней;
температура воздуха;
температура орошающей воды;
скорость потока воздуха;
давление воздуха;
давление по кислороду (определяющее его процентное содержание);
влажность воздуха;
влажность почвы.
На рисунке схематично изображен вариант использования восьмиканального регулятора ТРМ148 1-ой модификации для поддержания указанных параметров в заданных диапазонах значений. Прибор измеряет значения параметров, обрабатывает их и управляет выходными элементами для корректировки значений.
Описание модификации 2
В состав Модификации 1 входят 8 Каналов регулирования, в каждый из которых включены только Инспекторы.
Схема модификации 2 представлена на рисунке.
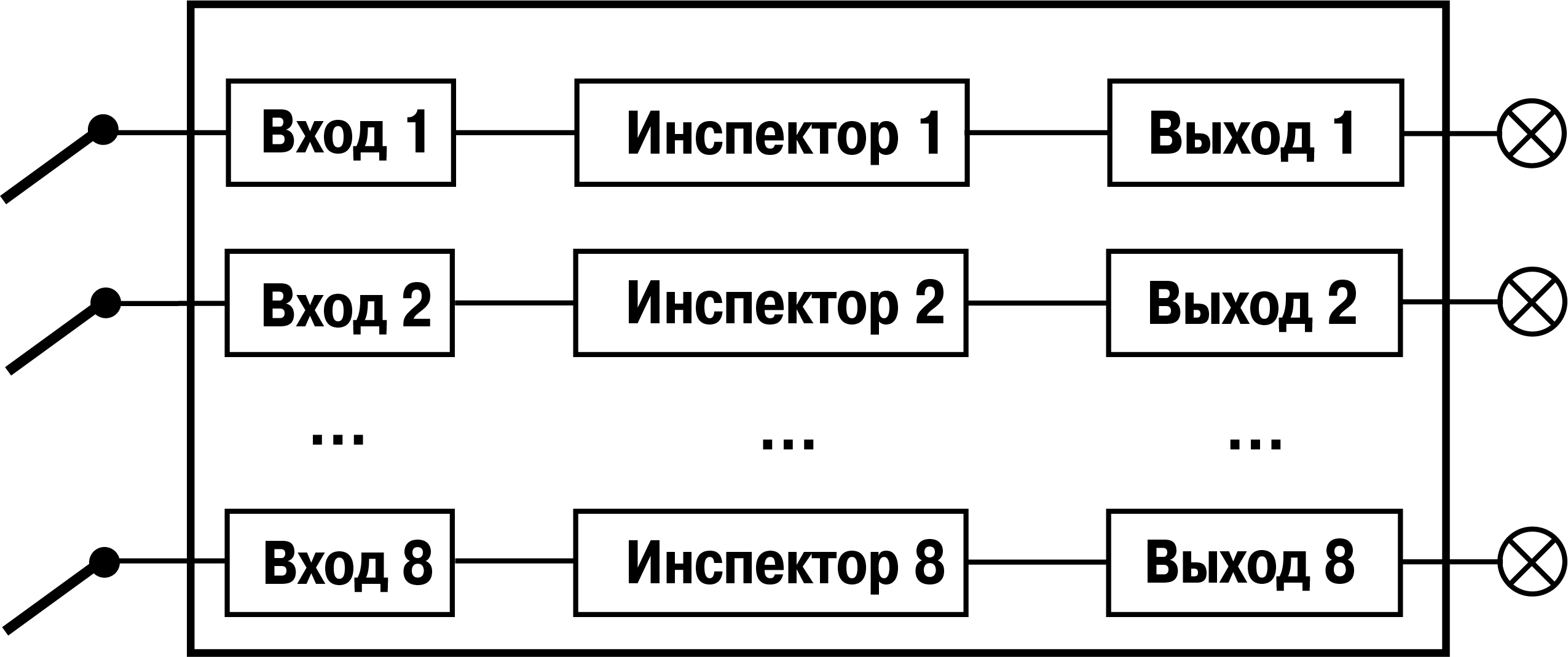
Модификация 2 предназначена для различной сигнализации (как правило, аварийной). В каждом канале реализована возможность вычисления квадратного корня из входного значения, что позволяет рассчитать расход по показаниям датчика перепада давления.
Данная модификация позволяет осуществить сигнализацию выхода нескольких параметров (от 1 до 8) за границы установленного диапазона (или вхождения этих параметров в заданный диапазон), и регистрацию указанных событий на выходных элементах. Текущие значения параметров и состояние каналов отражается на индикаторах прибора. Модификация может быть использована как непосредственно для сигнализации (на табло, сиреной и т. д.), так и для управляющего реагирования (включения насосов, вентиляторов, двигателей и т. п.). Комбинирование решений позволит создавать сложные автоматизированные системы.
Пример
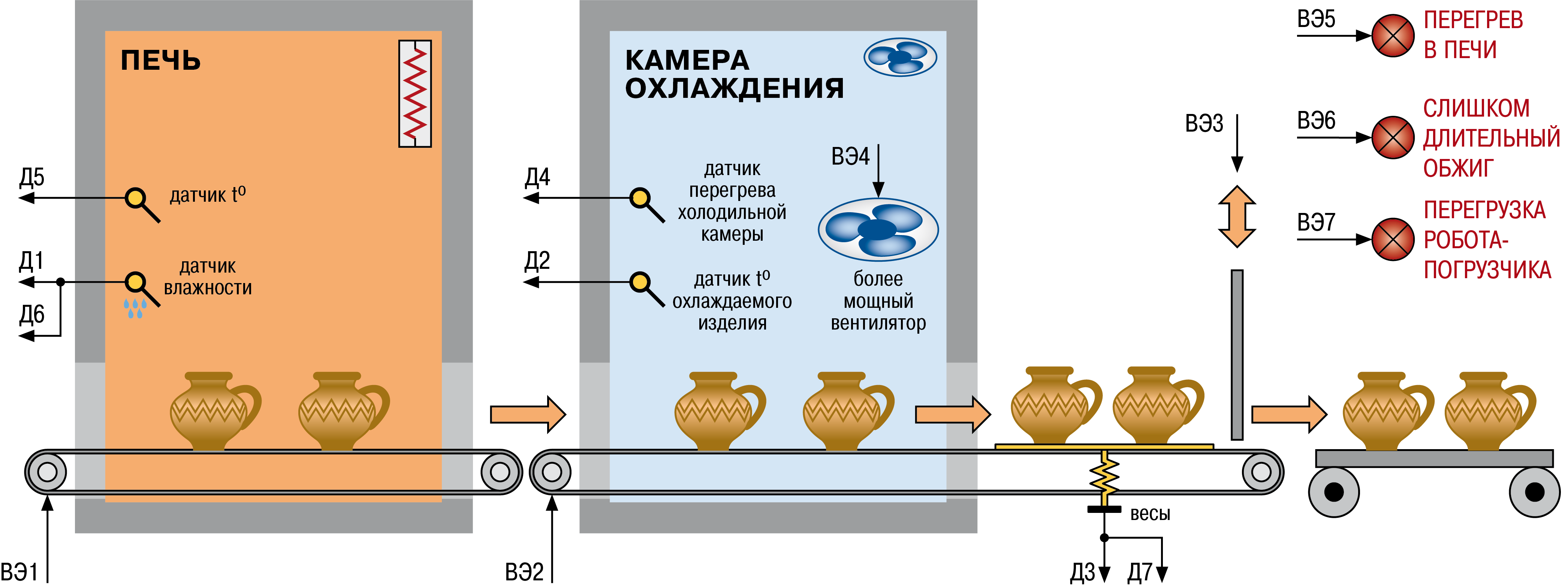
Прибор модификации 2 можно использовать в автоматизированном технологическом процессе обжига глиняных изделий. Глиняное изделие обжигается в печи до тех пор, пока не перестанет выделять влагу, потом охлаждается в холодильной камере до достижения комнатной температуры, затем погружается на робота-погрузчика, который загружается до заполнения и транспортирует изделия на склад. При перегреве холодильной камеры автоматически включится более мощный охлаждающий вентилятор. Имеются сигнализаторы аварии, которые отвечают за: выход температуры печи за пределы допускаемой, слишком длительный обжиг изделия, перегруженность робота-погрузчика.
На рисунке схематично изображен вариант использования восьмиканального регулятора ТРМ148 2-ой модификации в автоматизированном технологическом процессе обжига глиняных изделий.
Пример
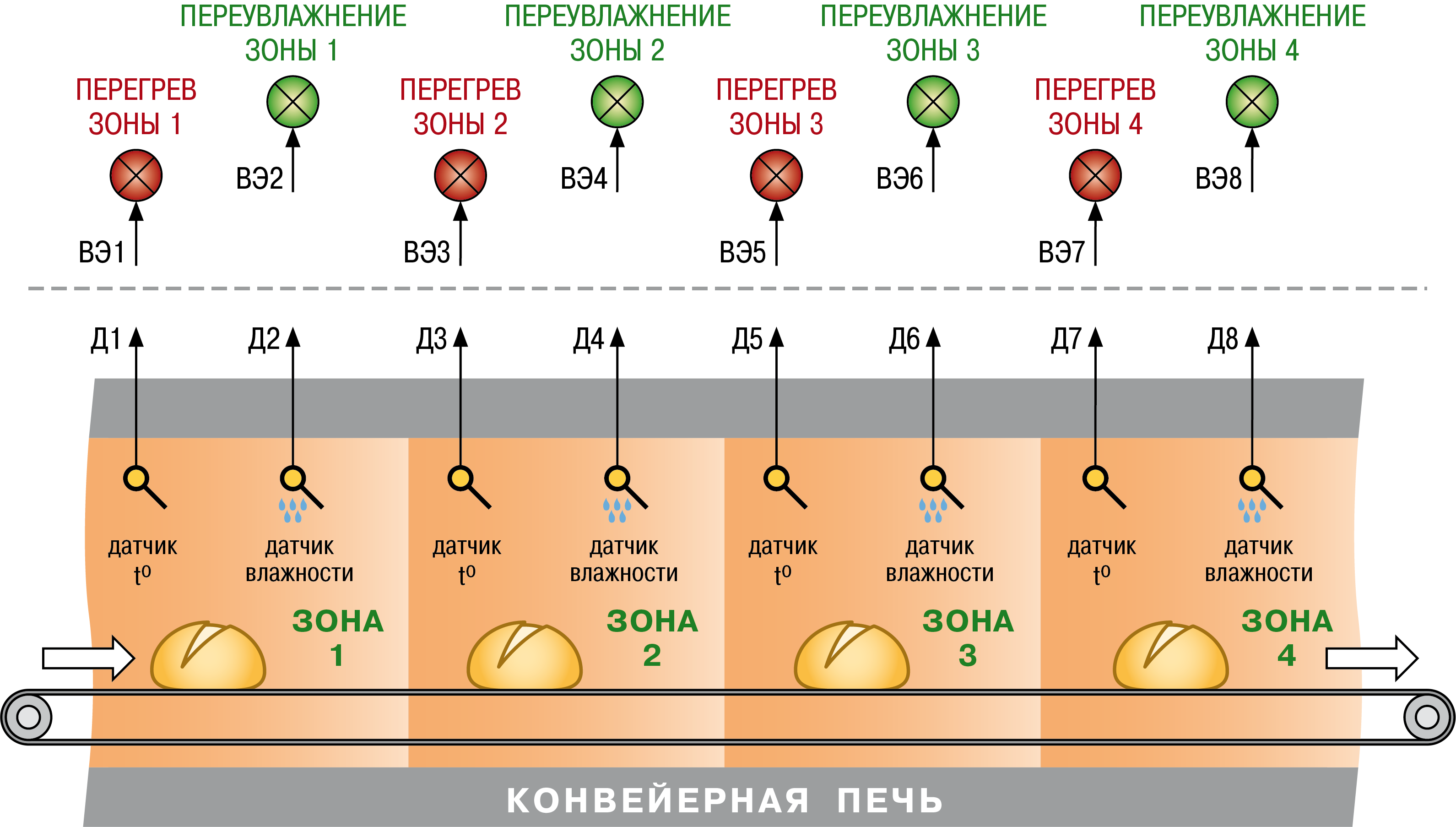
Прибор модификации 2 можно использовать в системе сигнализации автоматизированного технологического процесса выпекания хлебобулочных изделий. В контролируемом прибором процессе изделие располагается на конвейере, перемещающем его по ступеням технологического процесса изготовления от состояния заготовки до состояния конечного продукта (готового к употреблению изделия). Температура обработки – выпекания хлебобулочного изделия – в различных точках, в которых оказывается изделие при перемещении на ленте конвейера и где происходит его поэтапная обработка, поддерживается на заданном уровне. При ведении технологического процесса выпекания в установленных пределах поддерживается давление пара.
На рисунке схематично изображен вариант использования восьмиканального регулятора ТРМ148 второй модификации в системе сигнализации автоматизированного технологического процесса выпекания хлебобулочных изделий.
Описание модификации 3
В состав Модификации 3 входят 4 канала ПИД-регулирования, которые управляют задвижками по показаниям датчика положения (или согласно его математической модели).
Схема модификации 3 представлена на рисунке.
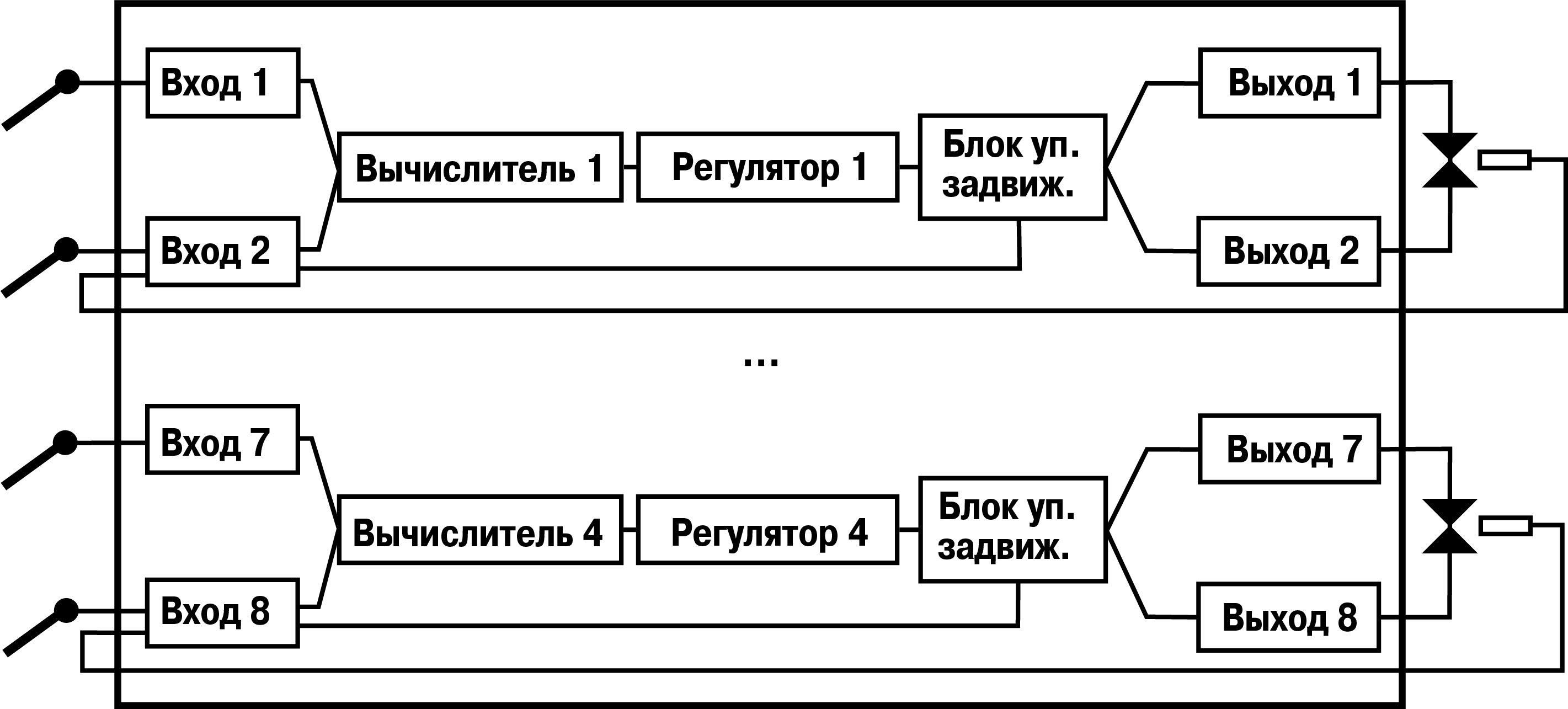
Модификация 3 предназначена для регулирования физических объектов с помощью управляемых задвижек – с датчиками положения (или без таковых). Такими объектами могут быть расходные коммуникации (трубы с водой), управляемые кранами, различные форсунки, антенны, направляемые автоматически, автоматизированные системы вентиляции и т.п. Каналы (от 1 до 4) работают параллельно, осуществляя независимое регулирование.
Регулирование задается уставкой – постоянной или изменяемой по времени величиной (графиком).
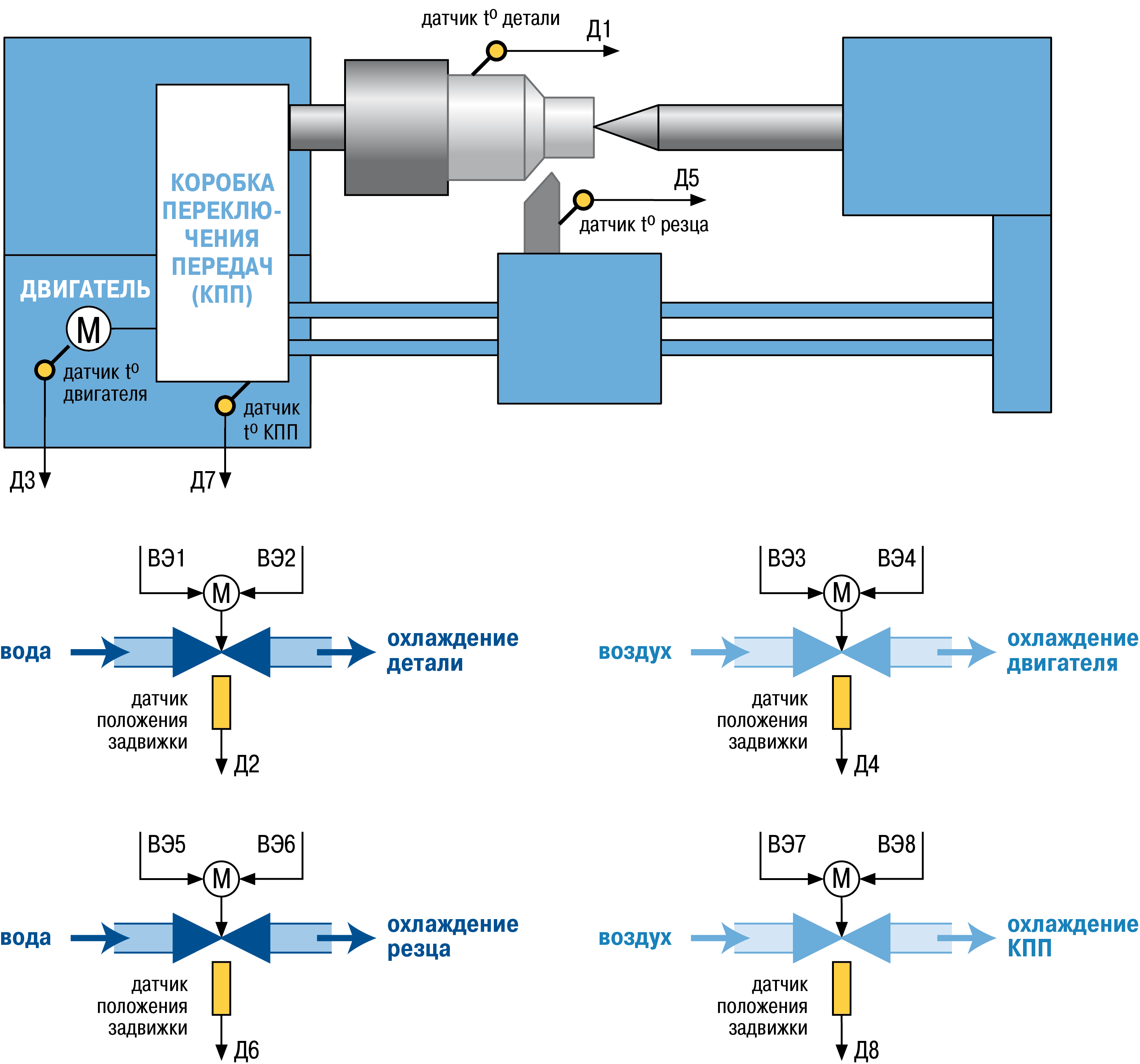
Пример
Прибор модификации 3 можно использовать в системе управления охлаждением станка для точной обработки деталей. Для работы станка требуется водное и воздушное охлаждение режущего инструмента станка и обрабатываемых им деталей, т. к. увеличение температуры детали и режущего инструмента в процессе резания сопровождается температурным изменением размеров и уменьшением точности. В здании завода имеется централизованная стационарная система водного и воздушного охлаждения, к которой подключен станок с использованием локальной автоматизированной системы, управляющей расходами воды и воздуха. Система стабилизирует температуру в четырех местах, охлаждаемых водой и воздухом, за счет регулирования их расходов.
На рисунке схематично изображен вариант использования восьмиканального регулятора ТРМ148 третьей модификации в технологической системе управления охлаждением станка для точной обработки деталей.
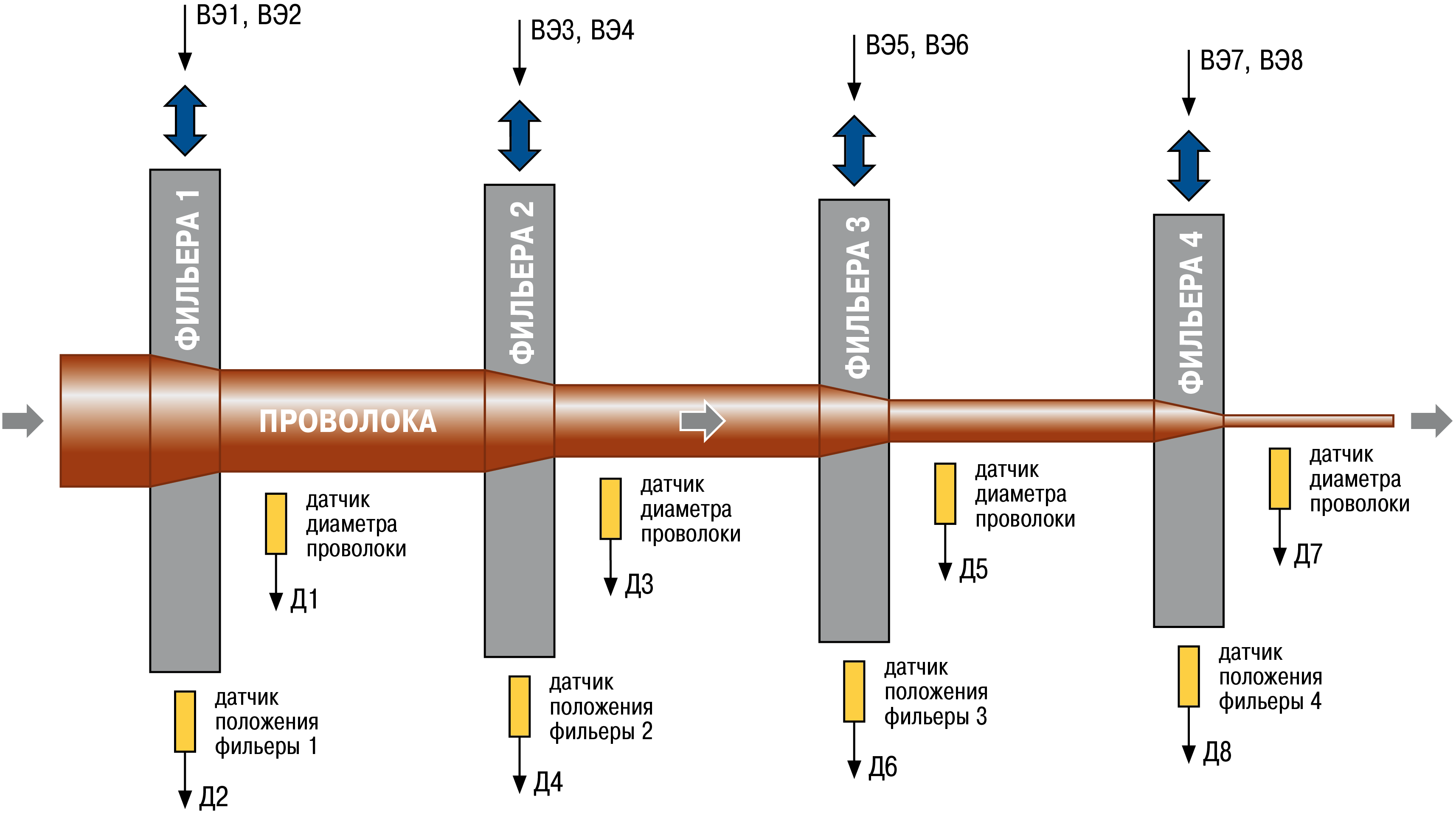
Пример
Прибор модификации 3 можно использовать в управляемой системе из четырех фильер для получения проволоки из твердых металлов различного диаметра. Фильеры быстро изнашиваются, и требуется их автоматическая подстройка.
На рисунке схематично изображен вариант использования восьмиканального регулятора ТРМ148 третьей модификации в управляемой автоматизированной системе из четырех фильер для получения проволоки.
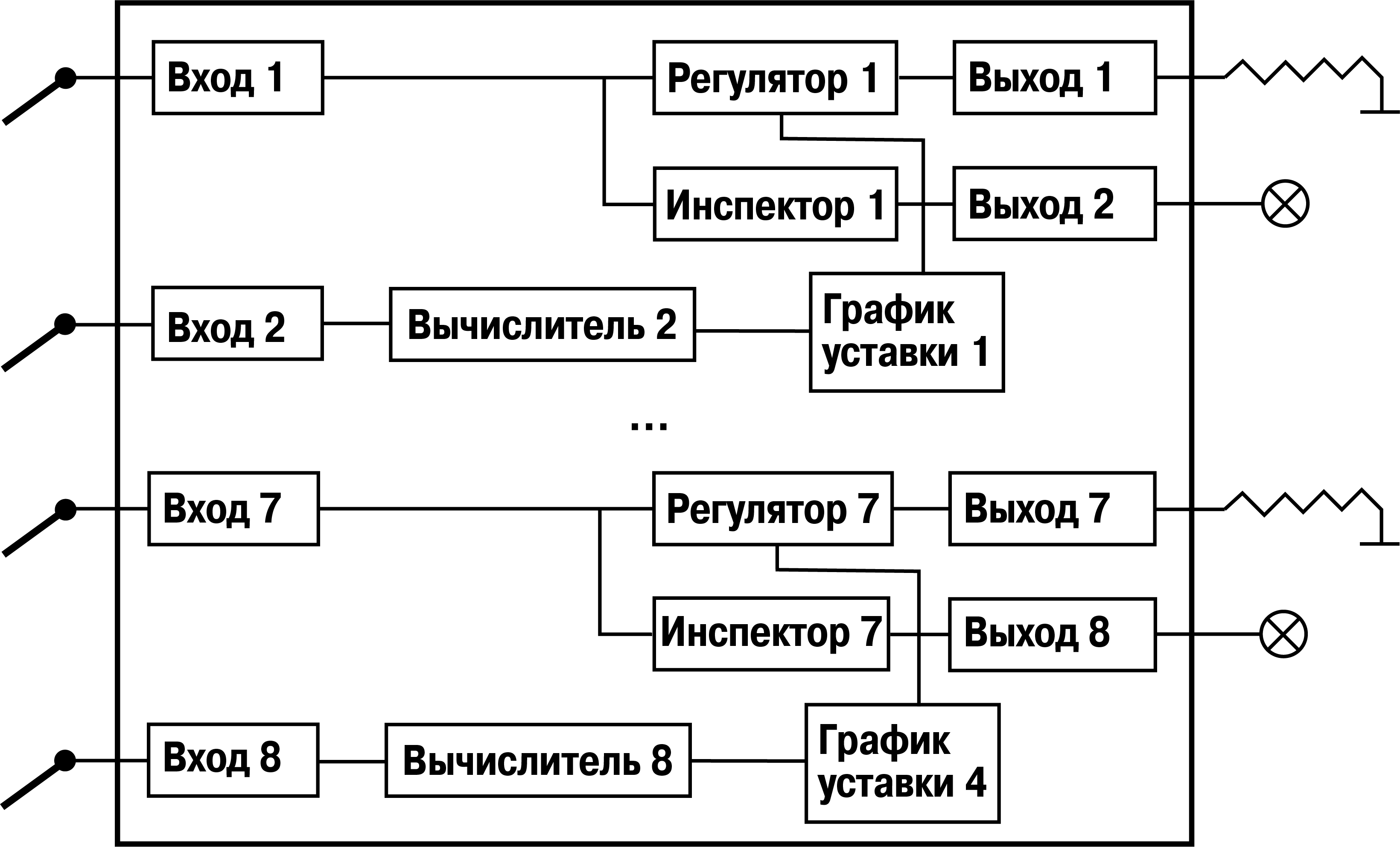
Описание модификации 4
В состав Модификации 4 входят 4 Канала регулирования (ПИД или ON/OFF), каждый из которых сопровождается Инспектором (модулем, контролирующим нахождение регулируемой величины в допустимом диапазоне).
Схема модификации 4 представлена на рисунке.
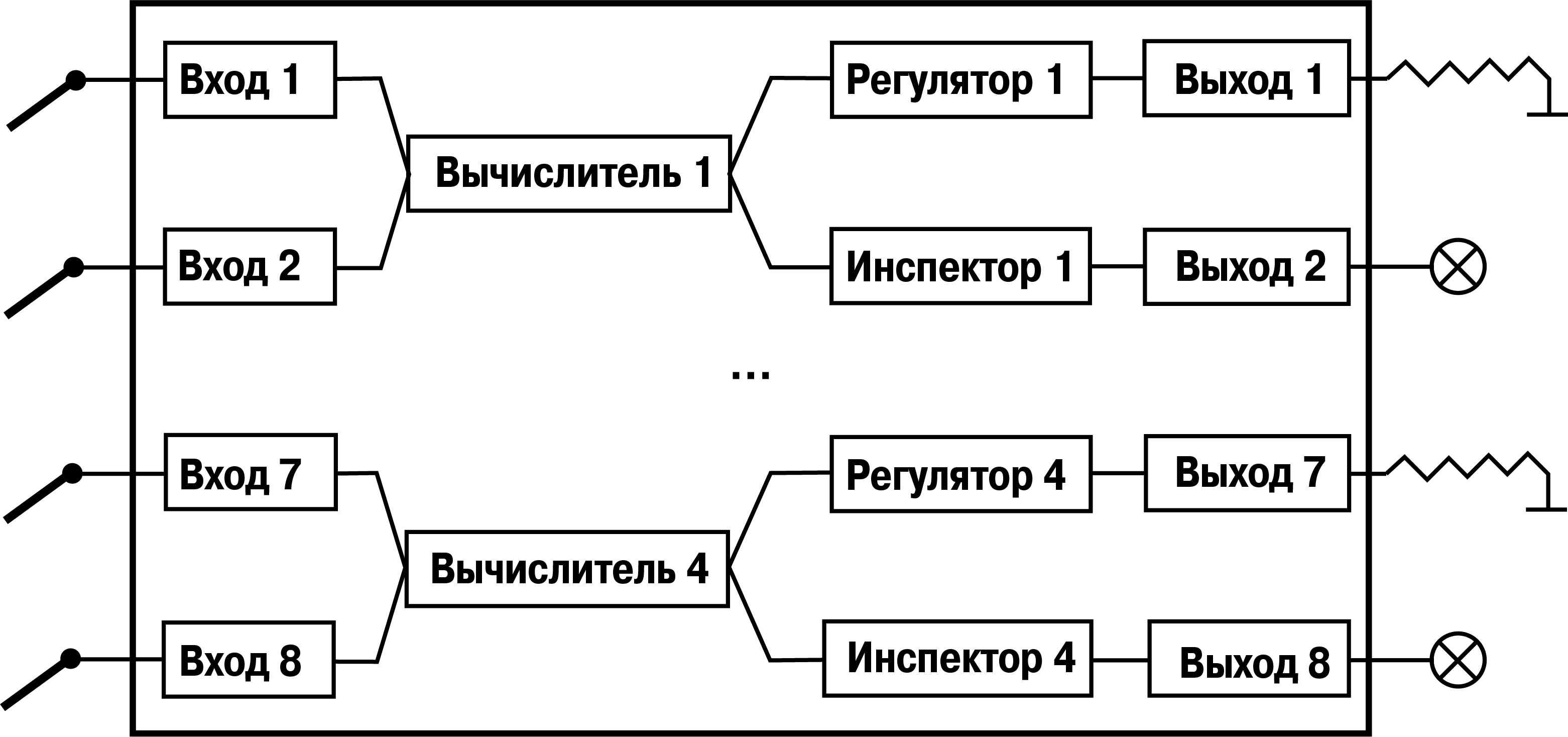
Модификация предназначена для регулирования до четырех физических величин с аварийной сигнализацией каждой. В каждом канале регулирования используется два входа, что позволяет регулировать величины, измеряемые двумя датчиками.
Регулирование задается уставкой – постоянной или изменяемой по времени величиной (графиком).
Пример
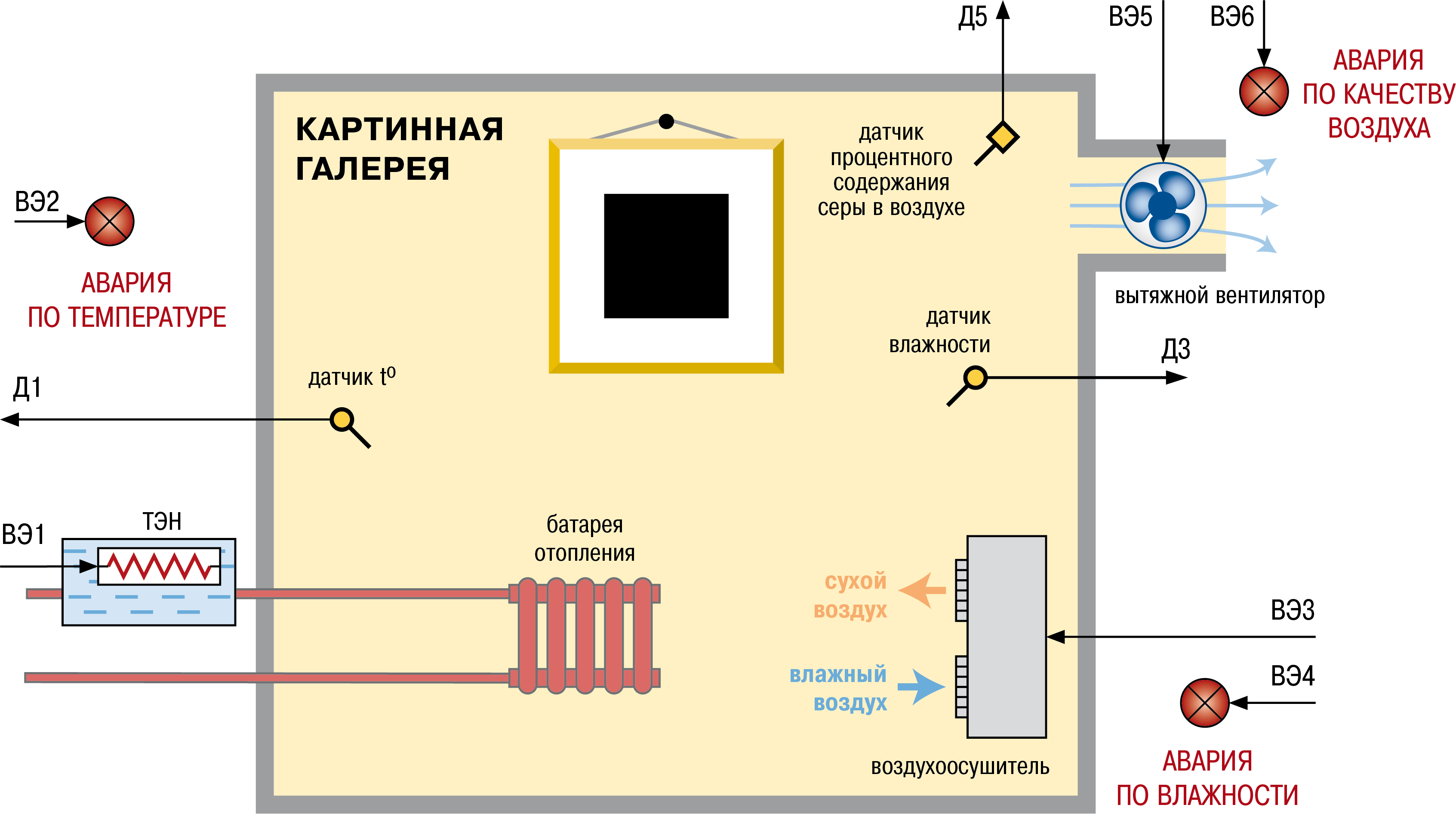
Прибор модификации 4 можно использовать в системе жизнеобеспечения выставочного зала картин. Для хранения картин требуется поддержание температуры и влажности в помещении, а также ограничение процентного содержания соединений серы в воздухе. Температуру помещения регулируют за счет изменения температуры отопительных батарей. Для регулирования влажности имеется воздухоосушитель. Соединения серы удаляют из помещения, применяя вытяжную вентиляцию. Для реализации поставленной задачи используется трехканальный канальный вариант модификации 3. Канал 1 регулирует температуру, канал 2 – влажность, канал 3 – качество воздуха. Аварийная ситуация инициирует зажигание соответствующей лампочки на пульте дежурного.На рисунке схематично изображен вариант использования восьмиканального регулятора ТРМ148 четвертой модификации в системе жизнеобеспечения выставочного зала картин.
Описание модификации 5
В состав Модификации 5 входят 4 Канала регулирования (ПИД или ON/OFF) по графику уставки, каждый из которых сопровождается аварийной сигнализацией.
Схема модификации 5 представлена на рисунке.
Модификация 5 позволяет создавать сложные системы регулирования с изменяющейся в процессе регулировки уставкой, которая зависит от входной величины или от времени.
График зависимости от входной величины позволяет создавать климатозависимые системы (пример - система обогрева помещения, в которой температура батарей изменяется в зависимости от температуры на улице). График зависимости от времени позволяет управлять технологическими процессами, которые требуют автоматического изменения уставки в течение работы.
Если требуется получать корректирующее значение только с одного входа прибора, то информация с остальных входов будет поступать на вычислитель канала, соответствующего этому входу. Неиспользуемые вычислители можно отключить. Для этого следует установить в параметре CAL.t значение "вычислитель отключен".
Пример
Прибор модификации 5 можно использовать в системе теплоснабжения здания. Система обеспечивает требуемый подогрев батарей отопления, нагрев горячей и холодной воды. Подогрев холодной воды используется при низкой температуре окружающего воздуха. Функционирование системы осуществляется с учетом тепловых магистральных потерь в подаваемых к контролируемому зданию потоках от находящейся в отдалении от дома тепловой станции, где и расположены нагреватели. Для реализации применяется трехканальный канальный вариант модификации 5.
На рисунке схематично изображен вариант использования восьмиканального регулятора ТРМ148 пятой модификации в системе теплоснабжения здания.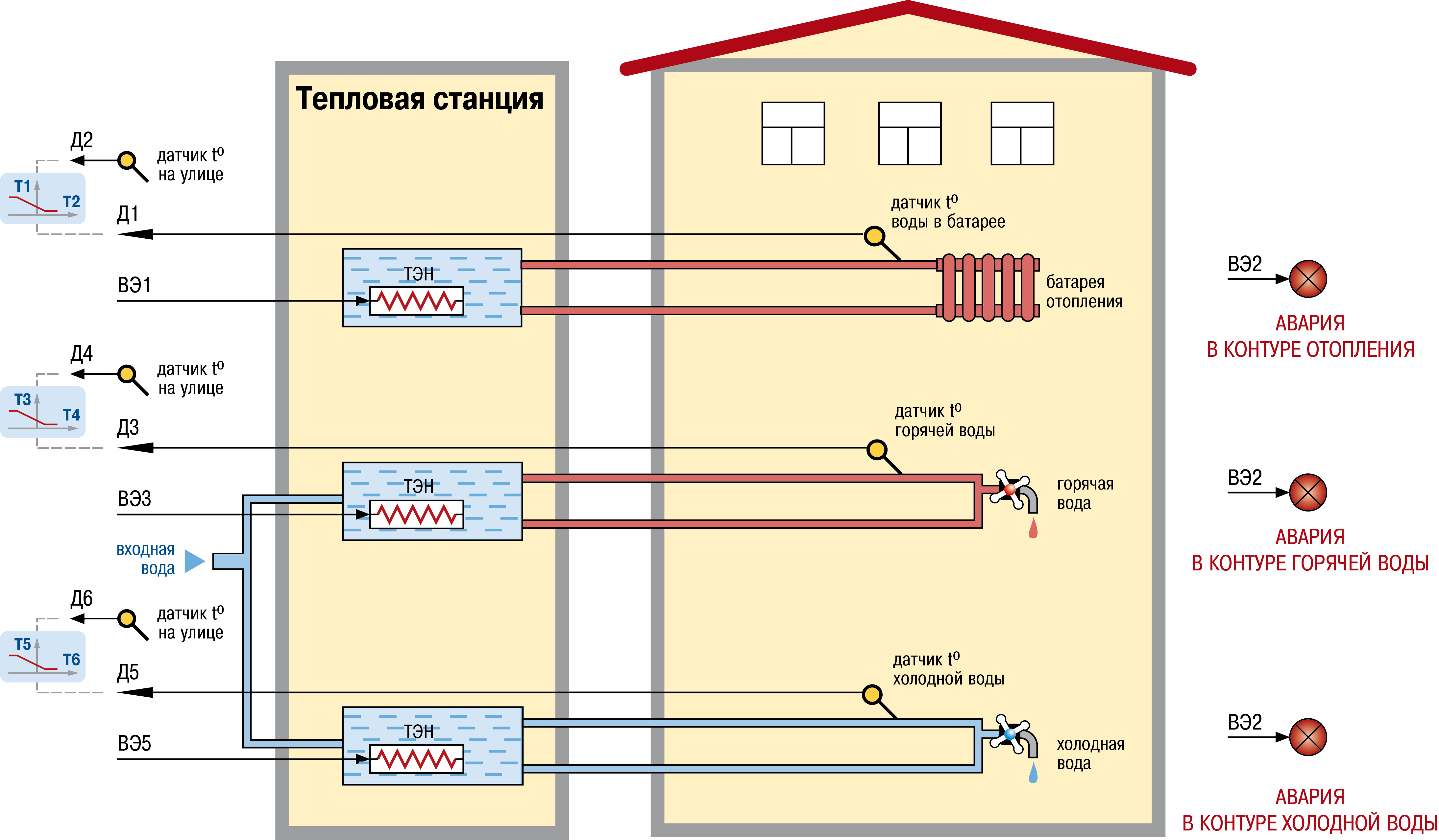
Пример
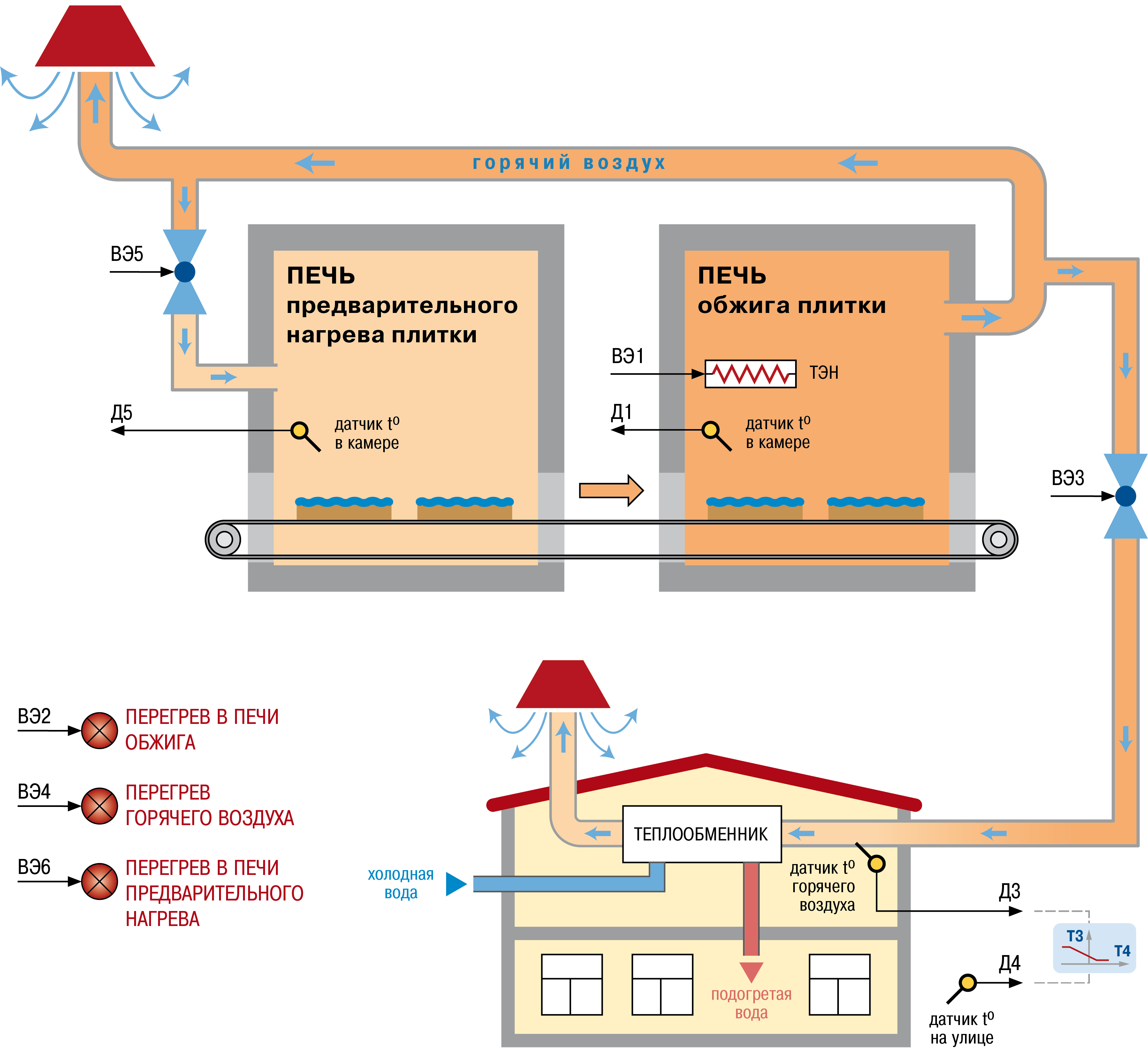
Прибор модификации 5 можно использовать в системе термообработки (обжига) керамической плитки. По существующему стандартному технологическому процессу плитка обжигается в электрической печи при температуре 110 градусов 40 минут, потом температура в течение 50 минут плавно доводится до 500 градусов. На этой температуре плитка выдерживается в течение 3 часов, затем в течение 5 часов плавно охлаждается до комнатной температуры. Отработанный воздух из системы термообработки отводится вентиляционной установкой по воздуховодам и используется (может быть использован) для обогрева помещений: в теплообменнике, установленном в обогреваемом доме, поступающая паровоздушная смесь разогревает подводимую к зданию холодную воду до необходимой температуры. Кроме того, часть отводимого тепла используется для предварительного разогрева плитки перед печью. Для реализации описанной схемы применяется трехканальный канальный вариант модификации 5.
Описание модификации 6
В состав Модификации 6 входят 2 Канала ПИД-регулирования задвижками с датчиком положения. Регулируемая величина вычисляется Вычислителем (например, соотношения газ/воздух). В каждом канале работает модуль Инспектора, выдающий сигнал на выходной элемент при выходе регулируемой величины за допустимый диапазон.
Регулирование может быть задано уставкой – постоянной или изменяемой по времени величиной (графиком).
Схема модификации 6 представлена на рисунке.
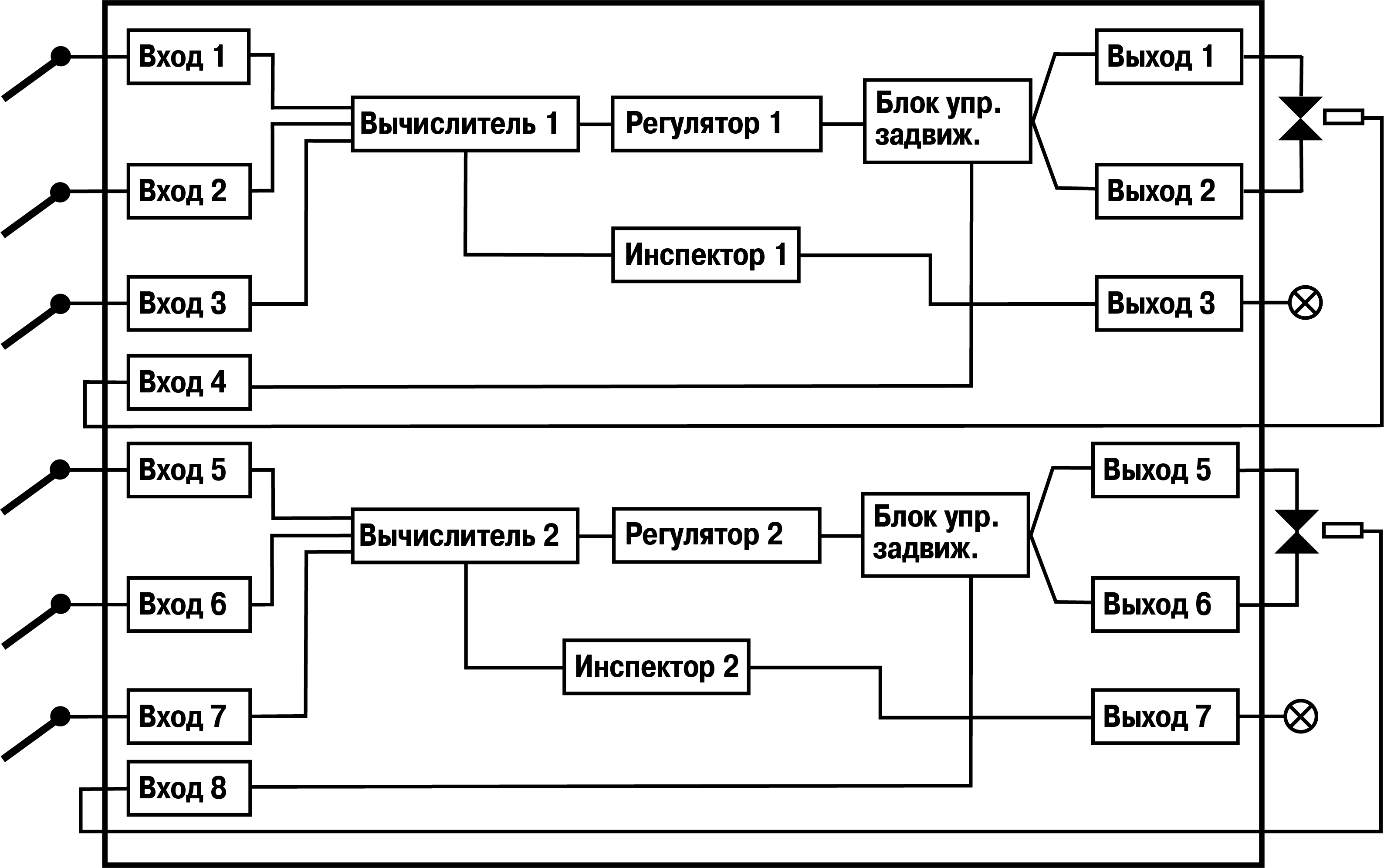
Модификация 6 отличается от Модификации 3 следующим:
три входа вместо двух на канал;
два канала вместо трех;
для каждого канала есть аварийная сигнализация.
Данную модификацию можно использовать для следующих систем:
системы регулирования соотношения (газов, воды и т. п.), управляющие, например, двумя кранами;
системы, требующие сложного регулирования по нескольким (до трех) входным величинам;
иные системы с необходимостью управления задвижками и наличием сигнализации.
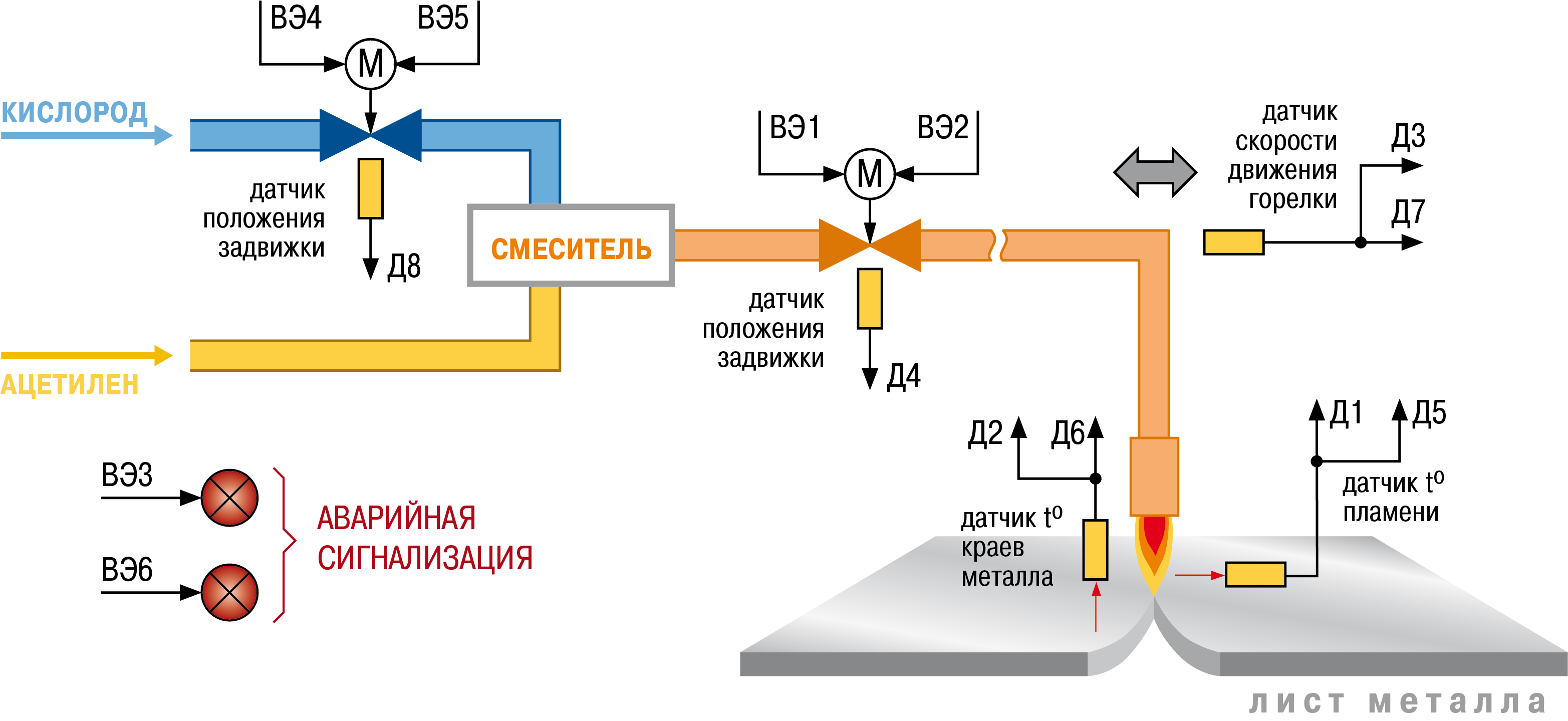
Пример
Прибор модификации 6 можно использовать в производственной автоматизированной установке резания листов из металлических сплавов. В качестве рабочего инструмента в установке используется кислородно-ацетиленовая горелка, при работе которой, в зависимости от толщины листа и вида (характеристик) материала листа, для горелки устанавливается и поддерживается соответствующий уровень мощности и температуры пламени. ТРМ148 используется для регулирования расхода компонентов горения, контроля температуры пламени и пр. При возникновении аварийной ситуации – падение расхода компонентов из-за частичного или полного засорения газовых коммуникаций, нерегулируемое изменение температуры пламени (из-за нарушения характеристик компонентов горения, эрозии или сужения (температурного дефекта) сопла горелки и т.п.) и/или др., – подача компонентов горения будет отключена и сработает аварийная сигнализация.
На рисунке схематично изображен вариант использования восьмиканального регулятора ТРМ148 шестой модификации в производственной автоматизированной установке резания листов из металлических сплавов.
Настройка
Общие принципы
Перед эксплуатацией прибора следует задать полный набор значений настраиваемых параметров, определяющих работу прибора. Этот набор параметров называется Конфигурацией.
Перед использованием прибор следует сконфигурировать под задачу или вызвать одну из стандартных модификаций, записанных в энергонезависимой памяти прибора, и донастроить при активировании.
Допускается изменять значения не всех параметров, а только требуемых.
Измененная конфигурация записывается в энергонезависимую память и сохраняется в ней при отключении питания.
ТРМ148 можно настроить двумя способами:
кнопками на лицевой панели прибора;
с ПК с помощью программы «Конфигуратор ТРМ148».
Перед настройкой ТРМ148 с помощью кнопок на его лицевой панели следует включить питание. Никаких других предварительных операций проводить не требуется.
Перед настройкой с помощью ПК следует подключить прибор к ПК по интерфейсу RS-485 через адаптер АС4 или другой адаптер RS-485/RS-232.
Задание конфигурации прибора
ТРМ148 конфигурируется последовательным соединением блоков прибора в единую систему.
Элементы конфигурации соединяются (и разъединяются) в строгой последовательности, изложенной ниже. Нарушение последовательности делает невозможным корректное задание конфигурации.
Соединение элементов прибора выполняется в следующем порядке:
Указывается количество Объектов (параметр n.ObJ).
Указывается количество Каналов в Объекте (параметр n.Ch). Прибор автоматически распределяет свободные Каналы между Объектами, указывая номера Каналов в параметре S.idx.
Для каждого Канала включается (или не включается) Регулятор (rEGL), Инспектор (insP) и Регистратор (OP.i).
Для каждого Канала задается тип вычислителя (CAL.t).
Для каждого задействованного входа Вычислителя указывается источник данных.
Для каждого Канала с включенным Регулятором в параметрах Od.tP и r.Od.i задается подключение и номер ПС.
Для каждого включенного ПС задается количество подключенных БУИМ типа Нагревателей и БУИМ типа Холодильников (параметр nPC).
Для каждого включенного БУИМ указывается его тип (параметр SE.P).
Для каждого включенного БУИМ указывается номера используемых им ВЭ (параметр OP).
Блоки прибора следует разъединять в обратном порядке. Для разъединения элементов прибора или исправления ошибок, возникших в результате неверных действий при создании конфигурации, рекомендуется использовать процедуру Инициализации.
После создания конфигурации следует задать остальные параметры всех включенных блоков. Параметры Входов, Сетевых входов, Мастера сети, сетевых настроек прибора, уставок, Регистраторов и графики коррекции уставки можно задать в произвольное время и в любом порядке.
Результаты создания конфигурации можно протестировать с передней панели прибора.
Настройка индикации
Для управления прибором и для изменения режимов работы в ТРМ148 реализован режим основной индикации.
Также существует несколько вспомогательных режимов индикации, которые включаются при автонастройке регуляторов, юстировке, настройке и др.
В режим основной индикации прибор попадает сразу при включении (с учетом значения параметра bEHV).
На первом индикаторе ЦИ1 отображается значение с вычислителя в текущем канале.
На втором индикаторе ЦИ2 в процессе работы отображаются: текущая уставка, время работы, режимы STOP и Авария, код аварии.
Индикатор ЦИ3 отображает значение выходного сигнала (мощности) в канале.
На индикаторе ЦИ4 отображаются номер объекта и канала через точку. Если объект единственный, то показан только номер канала.
Если в процессе работы прибора предусмотрена индикация текущей
уставки и времени работы, то при включении питания прибора индицируется
значение уставки. Для переключения отображаемой на ЦИ2 информации
(текущая уставка, время работы) можно нажать комбинацию кнопок и .
Если прибор переходит в состояние Авария, то по нажатию
кнопки можно
получить информацию о коде Аварии.
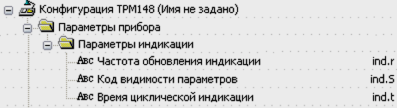
Режим функционирования индикации задается в служебных параметрах ind.r и ind.t.
Параметр ind.r – частота обновления индикации – указывает (задает) время, через которое на ЦИ1 будет обновляться информация о значении измеренной или вычисленной величины.
Если время, указанное в параметре ind.r, меньше периода опроса соответствующего датчика itrl, информация будет обновляться с частотой опроса датчика.
Сообщения на ЦИ1 обновляются в момент нажатия кнопок на передней панели прибора вне зависимости от значения параметра ind.r.
Параметр ind.S – код видимости параметров прибора при настройке с лицевой панели прибора – дает возможность скрывать отдельные параметры и папки (см. таблицу ниже).
Коды видимости параметров
Атрибуты параметров прибора | Значения ind.s, при которых параметр виден |
|---|---|
Редактируемый, Пользовательский | 1, 2, 3 |
Нередактируемый, Пользовательский | 2, 3 |
Редактируемый, Заводской | 1, 2, 3 |
Нередактируемый, Заводской | 3 |
Параметр ind.t – время циклической индикации
– указывает (задает) время, через которое будет сменен (на следующий)
индицируемый канал при включенном режиме автоматической смены индикаций.
Этот режим включается/выключается одновременным нажатием кнопок и .
Описание индикации при аварии
Аварийное состояние – состояние, в которое переводится объект при срабатывании блока Логики принятия решения об аварии или при иных аварийных ситуациях (например, при обрыве датчика).
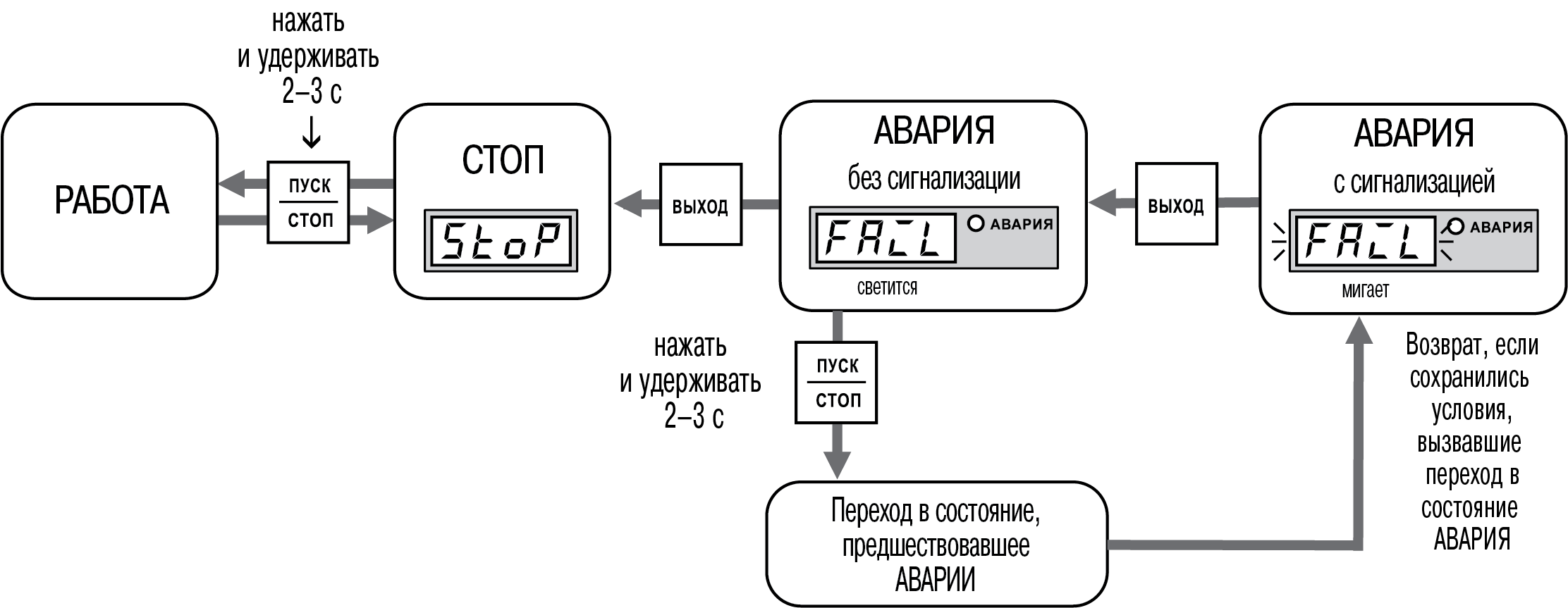
Критическая авария
Во время критической аварии на ЦИ2 отображается сообщение FAIL. Критическая авария имеет два подрежима: «Авария с сигнализацией» и «Авария без сигнализации»
При возникновении критической аварии прибор переходит в режим «Авария с сигнализацией». Сигнал, управляющий устройством аварийной сигнализации, подается на ВЭ, номер которого указан в параметре AL.rE (при AL.rE = 0 управляющий сигнал не подается). К этому ВЭ (как правило, это реле) можно подключить устройство, которое выдаст звуковой или световой сигнал, сообщающий об аварии. Необходимо помнить, что при аварии с сигнализацией каждый из подключенных объектов переходит в режим Авария отдельно, а на ВЭ подается объединенный по логике «ИЛИ» сигнал от всех подключенных объектов.
Аварийную сигнализацию можно отключить кнопкой .
При переводе в подрежим «Авария без сигнализации» ВЭ (если он задействован) размыкается, и аварийная сигнализация отключается. Однако прибор по-прежнему находится в режиме Авария и не может продолжать нормальную работу.
В подрежиме «Авария с сигнализацией» надпись FAIL мигает. В подрежиме «Авария без сигнализации» (а также после
перехода в такой режим из состоянии «Авария с сигнализацией» нажатием кнопки ) надпись FAIL светится
непрерывно (см. таблицу ниже).
На ЦИ4 отображаются номер объекта и канала, в котором произошла авария.
Индикация в режиме критической аварии
Вид аварии | Светодиод | Надпись «Fail» |
|---|---|---|
Авария с сигнализацией | Мигает | |
Авария без сигнализации | Светится | |
После устранения причины аварии прибор может переключиться в режим, использовавшийся до возникновения критической ошибки, и возобновить работу. Для этого надо нажать кнопку ПУСК/СТОП. Если причина аварии не была корректно устранена, то прибор автоматически перейдет в режим «Авария с сигнализацией».
Некритическая авария
При некритической аварии в режиме основной индикации на ЦИ2 периодически (период примерно 2 секунды) вместо показаний отображается сообщение Attn.
Для выяснения причины любой АВАРИИ (критической или некритической)
следует нажать и удерживать кнопку . На ЦИ2 отображается Код АВАРИИ.
Настройка сетевого интерфейса RS-485
Режим работы сети RS-485 определяют 5 параметров, представленных в таблице ниже.
При конфигурировании прибора на заводе-изготовителе для прибора и Конфигуратора устанавливаются одинаковые значения сетевых параметров.
Заводские значения сетевых параметров прибора и программы «Конфигуратор ТРМ148»
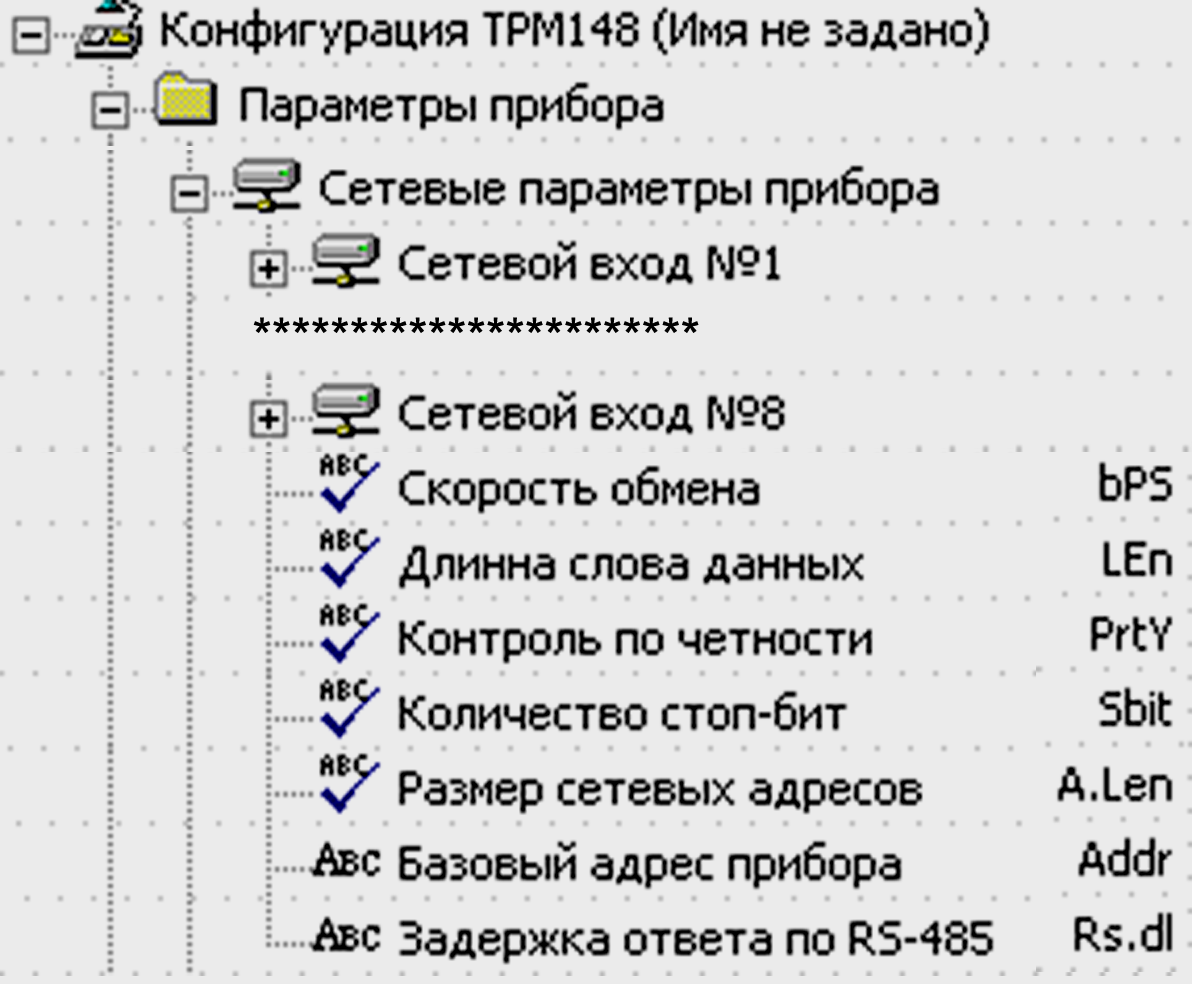
Имя параметра | Название параметра | Значение |
|---|---|---|
bPS | Скорость обмена данными | 9600 бит/с |
Len | Длина слова данных | 8 бит |
PrtY | Контроль четности | отсутствует |
Sbit | Количество стоп-бит в посылке | 1 |
A.Len | Длина сетевого адреса | 8 бит |
Addr | Базовый адрес прибора | 16 |
Изменение сетевых настроек прибора или программы требуется при одновременной работе с несколькими приборами в сети.
Частые сообщения об ошибках при чтении или записи параметров указывают на проблемы связи. Для устранения ошибок следует изменить параметр Скорость обмена данными. Например, при работе на медленном ПК, если скорость составляла 9600 бит/с, следует установить 38400 или 57600 бит/с.
Если к сети RS-485 подключено несколько ТРМ148, для каждого из них следует установить уникальный базовый адрес.
Для обеспечения совместной работы сетевые параметры всех приборов одной сети и программы «Конфигуратор ТРМ148» должны быть одинаковы. В противном случае невозможно установить связь между приборами.
Базовые адреса всех приборов одной сети должны быть различны и заданы с интервалом, кратным 8. ПК своего базового адреса в сети не имеет.
Недопустимы сочетания параметров:
Len = 7, Prty = no, Sbit = 1;
Len = 8, Prty = even, Sbit = 2;
Len = 8, Prty = odd, Sbit = 2.
Базовый адрес прибора
Каждый ТРМ148 в сети RS-485 имеет свой уникальный базовый адрес.
Длина Базового адреса прибора определяется параметром A.Len при конфигурировании сетевых настроек и может быть равна либо 8, либо 11 бит. Соответственно, максимальное значение, которое принимает Базовый адрес при 8-битной адресации – 255, а при 11-битной адресации – 2047.
На заводе-изготовителе для всех приборов устанавливается одинаковый Базовый адрес. Если планируется использовать в одной сети RS-485 несколько приборов, то им следует задать новые значения Базовых адресов.
Для каждого следующего прибора в сети базовый адрес задается как:
Базовый адрес конкретного прибора = Базовый адрес предыдущего прибора + 8
Пример
Для прибора № 1 Базовый адрес равен 16. Тогда для прибора № 2 задается Базовый адрес 24, для прибора № 3 – 32 и т. д.При 8-битной адресации под каждый ТРМ148 резервируется 8 адресов в адресном пространстве сети. Эти адреса необходимы при передаче оперативных параметров по сети RS-485.
Изменение сетевых параметров прибора
Сетевые параметры прибора можно настроить двумя способами:
с помощью программ «Конфигуратор ТРМ148» или «Быстрый Старт»;
кнопками на лицевой панели прибора.
Изменение сетевых параметров прибора с помощью Конфигуратора
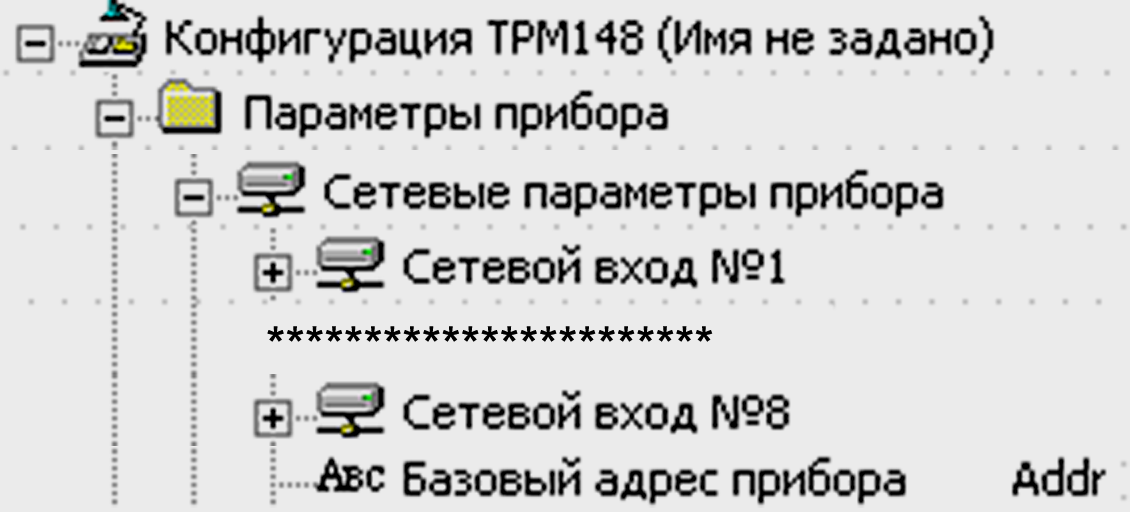
Сетевые параметры прибора можно настроить с помощью Конфигуратора, только если связь с ПК успешно установлена при текущих сетевых настройках.
Сетевые параметры программы задаются с использованием доступа через папку Сетевые параметры прибора или через меню Режимы программы | Сетевые параметры прибора.
После изменения сетевых параметров следует нажать кнопку Записать измененные или выбрать аналогичный пункт в меню, чтобы записать изменений в прибор.
После записи в прибор измененных Сетевых параметров прибора Конфигуратор автоматически предлагает изменить Сетевые параметры программы.
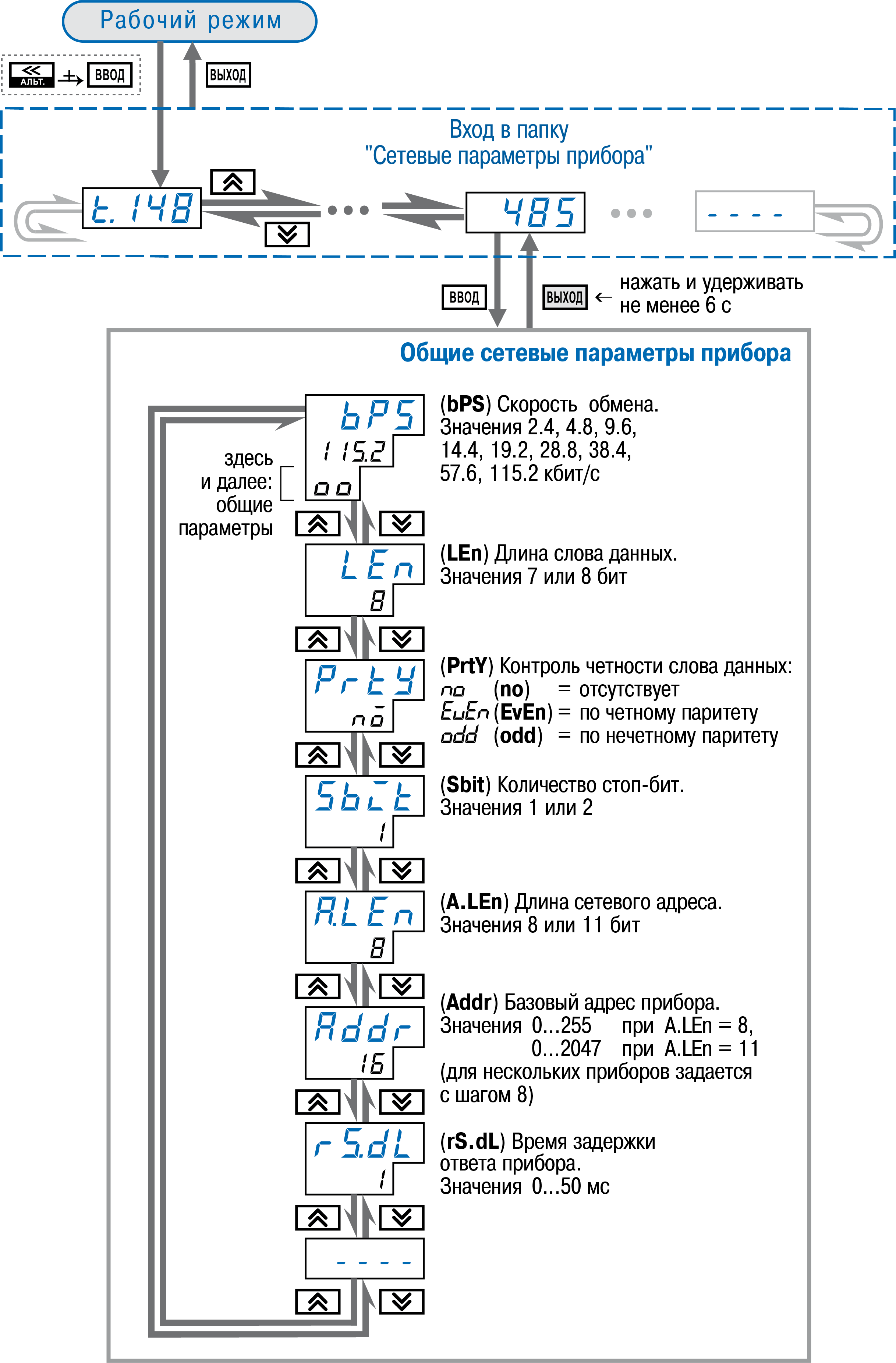
Изменение сетевых параметров прибора кнопками на лицевой панели
Если связь с ПК установить не удается, сетевые параметры можно задать только кнопками на лицевой панели прибора.
После изменения сетевых параметров прибора задаются аналогичные настройки для сетевых параметров программы и проверяется наличие связи с прибором.
Для того, чтобы вернуть прибор к стандартным сетевым настройкам,
следует одновременно нажать кнопки + + на
лицевой панели прибора.
Изменение сетевых параметров программы
Доступ к параметрам возможен через папку Сетевые параметры программы или через меню Режимы программы.
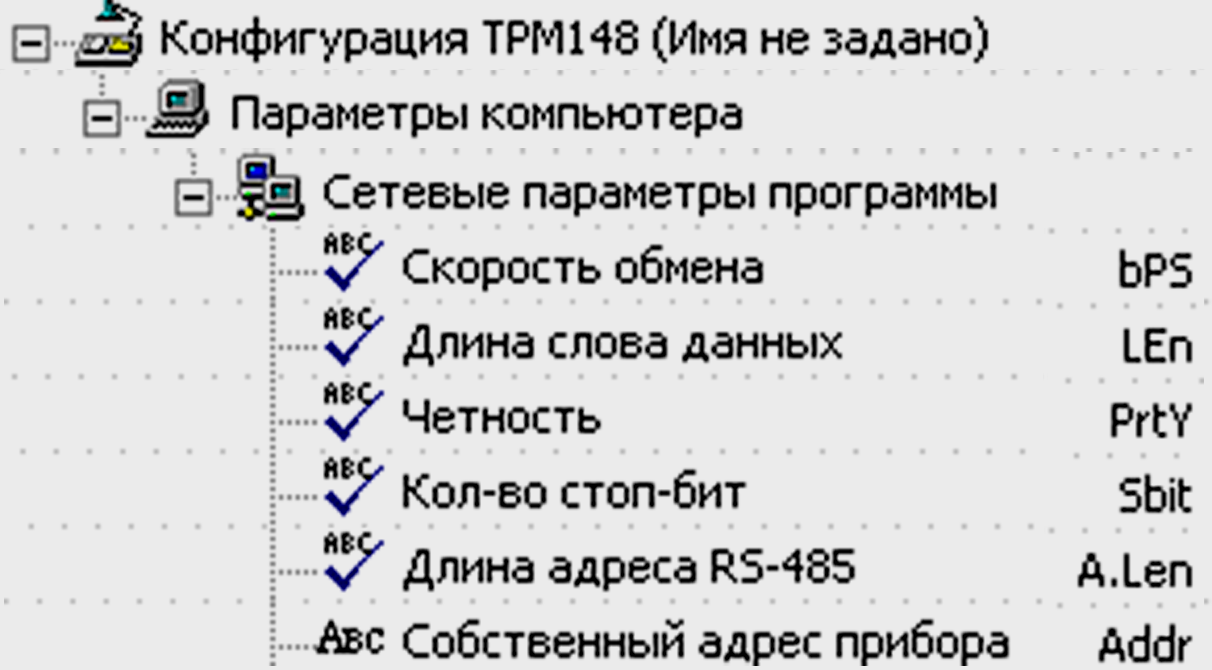
После задания сетевых параметров программы Конфигуратор считывает имя прибора для проверки связи. Для этого следует выбрать команду Считать имя прибора (Alt+N) в меню Прибор.
Если произошла ошибка считывания, следует проверить правильность установки сетевых параметров программы, соответствие их сетевым настройкам прибора, правильность подключения прибора к ПК через адаптер АС4.
Настройка с помощью кнопок на лицевой панели прибора
Прибор предоставляет удобные возможности для настройки с помощью кнопок на лицевой панели.
Соответствие символов на ЦИ
Названия параметров в данном документе записываются двумя разными способами: с помощью символов латинского алфавита и так, как они отображаются на ЦИ (см. рисунок ниже).

Общая схема задания параметров
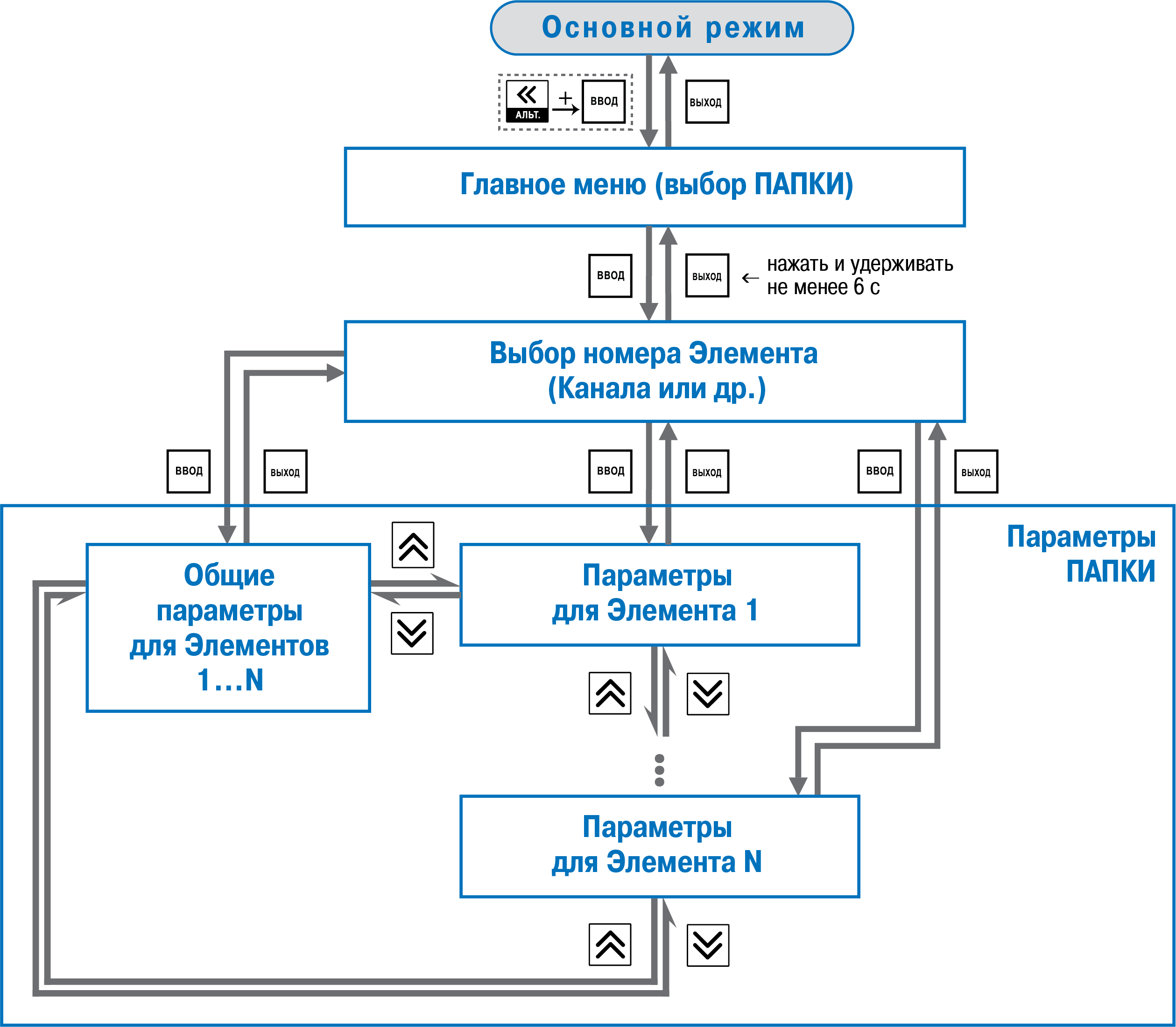
Основные правила при работе в Главном меню и при выборе Элемента
При настройке с помощью кнопок на лицевой панели прибора следует учитывать несколько основных правил.
Элемент (папки, значения и/или др.) выбирается кнопками и (циклически в любую сторону  ).
).
Мигает тот ЦИ, на котором изменяется информация.
 – знак конца списка
при циклическом перемещении.
– знак конца списка
при циклическом перемещении.
 – обозначение группы
«Общие параметры» при выборе элемента (Канала, Входа и т. д.).
– обозначение группы
«Общие параметры» при выборе элемента (Канала, Входа и т. д.).
После выбора элемента всегда следует нажать кнопку .
Переход на предыдущий уровень всегда осуществляется кнопкой . Исключение составляет настройка параметров
графиков.
Вход в режим Настройки. Главное меню
Для входа в настройку следует нажать комбинацию кнопок + .
На ЦИ1 отображаются имена папок, в которые сгруппированы параметры.
Для выбора нужной папки используются кнопки и . Изменения сохраняются .
Выбор Элемента (Канала, Входа и т. д.)
Параметры некоторых папок сгруппированы по Элементам (Каналам, Входам, и т. д.). Часть параметров является общей для всех Элементов.
На ЦИ1 при выборе отображается обозначение элемента (CH или CHAN – Канал, OB – Объект, и т. д.), на ЦИ2 – номер Элемента.

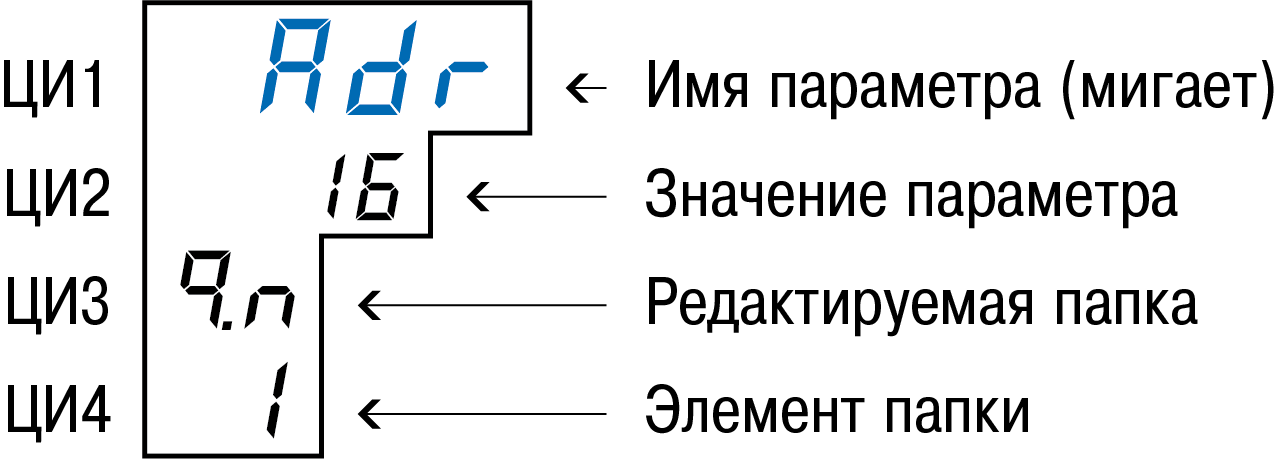
Вход в папку с параметрами. Индикация при задании параметра
При входе в папку на индикаторах отображается информация о первом параметре.
Показания цифровых индикаторов при задании параметров (на примере параметра ADR) приведены на рисунке ниже.
Некоторые параметры могут быть недоступны по следующим причинам:
они скрыты атрибутами доступа;
они относятся к неподключенному объекту, каналу, программному модулю и т. д.
Доступ в защищенную паролем папку
Отдельные папки с параметрами защищены паролями от несанкционированного доступа.
Пароли доступа с передней панели прибора к защищенным паролями папкам
Наименование дерева | Пароль доступа |
|---|---|
SenS | –15 |
LooP | –20 |
Anr.p | –25 |
GrF.i | –30 |
485 | –45 |
ConF | –50 |
Res.t | 2 (тестирование ресурсов) 3 (инициализация) |
CLBr (вызывается
комбинацией кнопок | 104 (Калибровка наклона) (тип 1) 102 (Калибровка Холодного спая) (тип 2) 111 (Заводская калибровка) (тип 3) 118 (Калибровка ДПЗ) (тип 4) 106 (Калибровка ЦАП) (тип 5) 80 (тестирование лицевой платы – индикаторов и кнопок) /не калибровка/ |
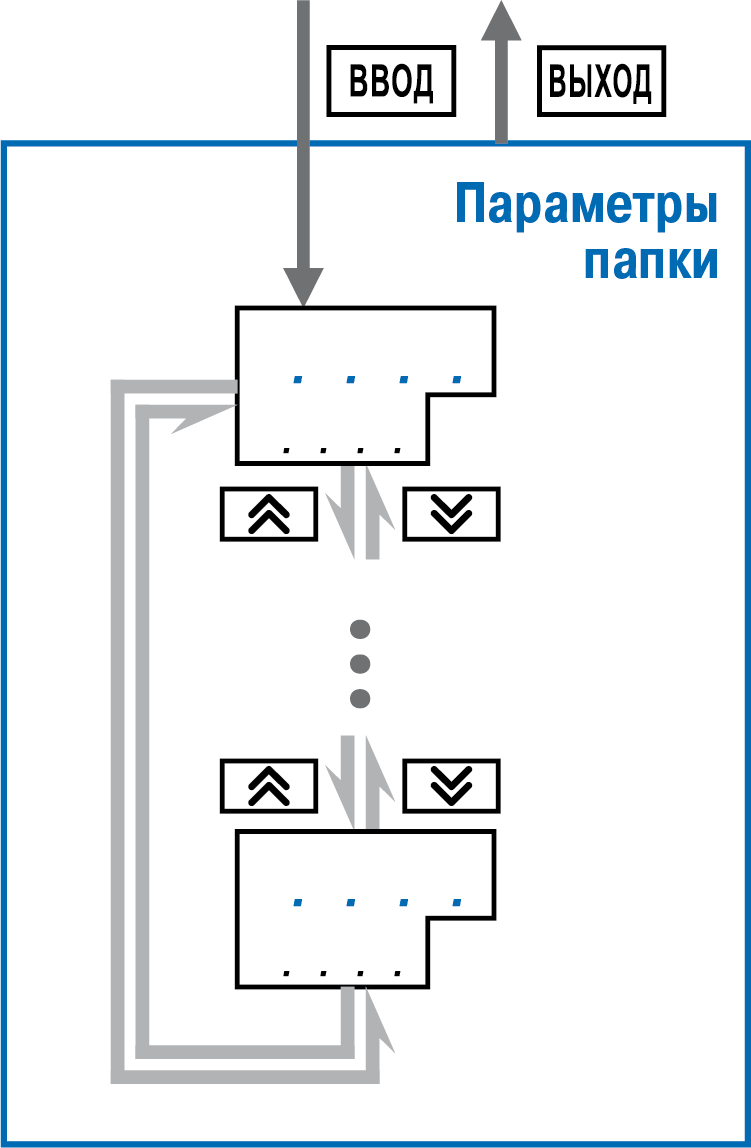
Перемещение между параметрами в папке
Перемещение между параметрами осуществляется кнопками и (циклически в любую сторону).
На ЦИ1 мигает имя параметра.
При выборе определенного Элемента (Канала, Входа и т. д.) выполняется вход в папку только для этого Элемента, но перемещаться можно между параметрами всех Элементов последовательно (циклически в любую сторону): общие параметры → параметры для Элемента 1 → параметры для Элемента 2 → ... → общие параметры.
Задание значения параметра
Если параметр символьный, то при нажатии кнопок и значения параметра последовательно
выводятся на ЦИ2.
Если параметр числовой, то кнопка увеличивает, а кнопка уменьшает значение параметра.
Если нажать кнопку или и удерживать ее,
то изменение значения ускорится.
После того, как значение задано, следует нажать кнопку (для выхода без записи нового значения нажать
кнопку ).
При выходе из режима редактирования снова начнет мигать имя параметра на ЦИ1.
Сдвиг десятичной точки
При изменении значения параметра кнопками и значение будет изменяться, начиная
с последнего разряда:
«8.974» → «8.975» → «8.976» → ...
Максимальное значение, которое можно установить на ЦИ2, – «9.999».
Для ввода большего числа следует сдвинуть десятичную точку.
Для сдвига десятичной точки следует:
До начала редактирования значения (т. е. когда на ЦИ1 мигает имя параметра) нажать и удерживать кнопку
. Через
некоторое время начнется циклический сдвиг вправо десятичной точки
на ЦИ2:8.974 → 89.74 → 897.4 → 8974 → 8.974 → ...
Дождавшись момента, когда десятичная точка установится в нужное положение, отпустить кнопку
. После
этого можно будет редактировать значение параметра.
Вложенные папки
Некоторые папки имеют в своем составе одну или несколько вложенных папок (например, папка «Регуляторы»).
Вложенная папка обозначается на ЦИ2 знаком  . Название папки выводится на
ЦИ1 (см. рисунок ниже).
. Название папки выводится на
ЦИ1 (см. рисунок ниже).
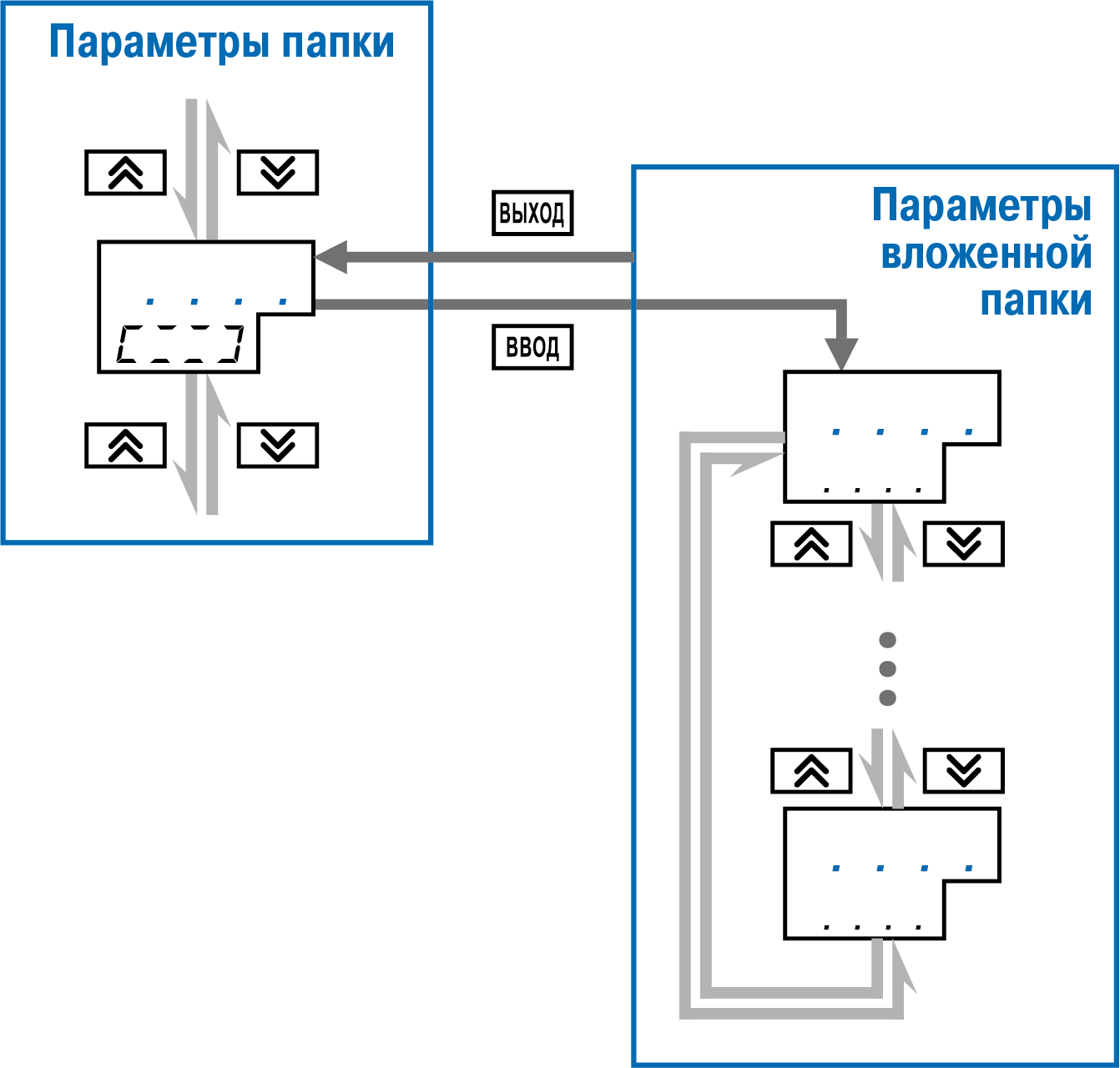
Для входа во вложенную папку следует нажать кнопку .
Все операции с параметрами во вложенной папке выполняются так же, как и в основной папке.
Схемы задания параметров
Подробные схемы задания параметров приведены на рисунках далее. Последовательность представления схем соответствует порядку задания параметров при конфигурировании прибора с прохождением поочередно всех папок Главного меню.
Перейти к следующей папке можно только после полного описания схем задания параметров одной папки, включая параметры вложенных папок всех ступеней иерархического построения.
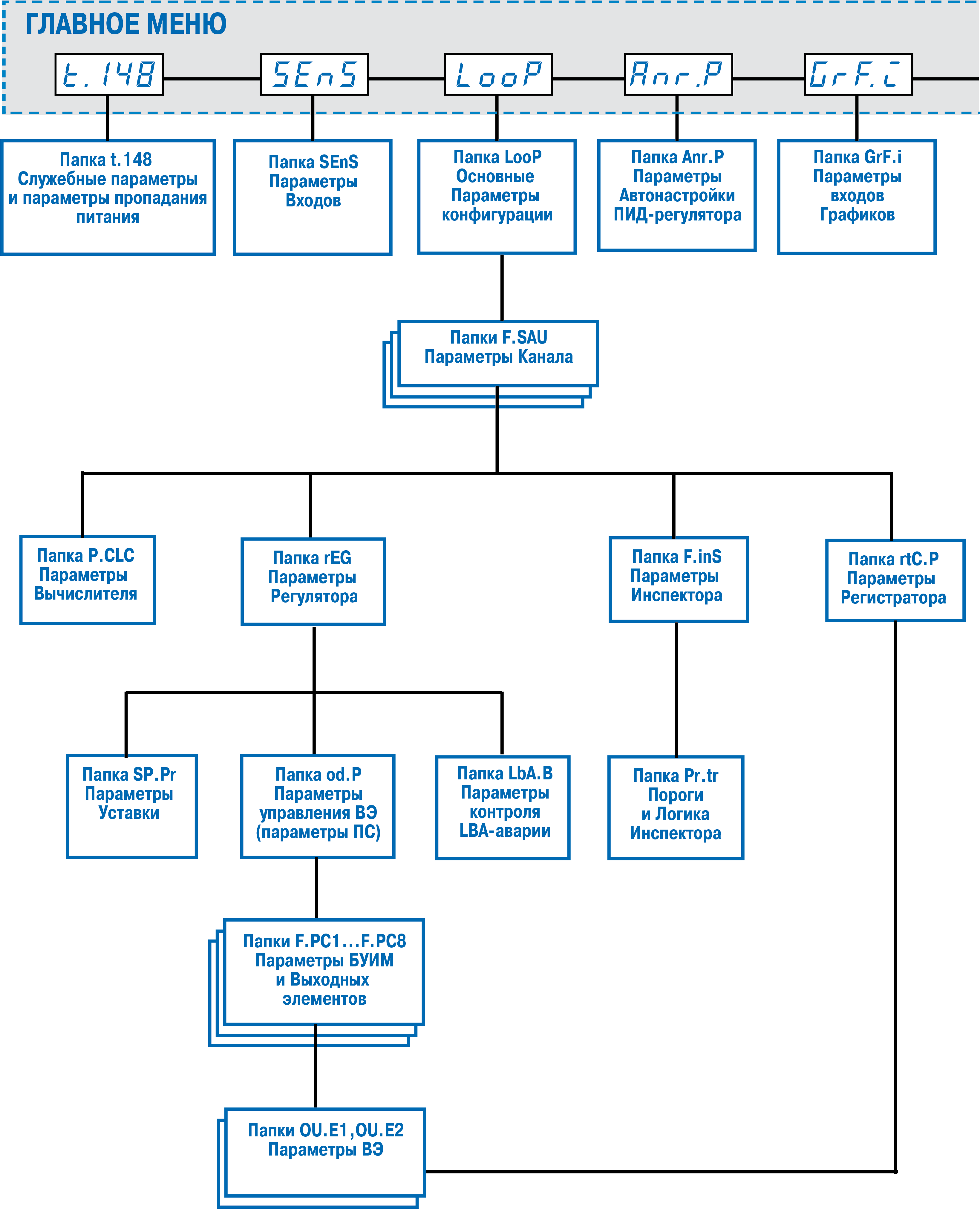
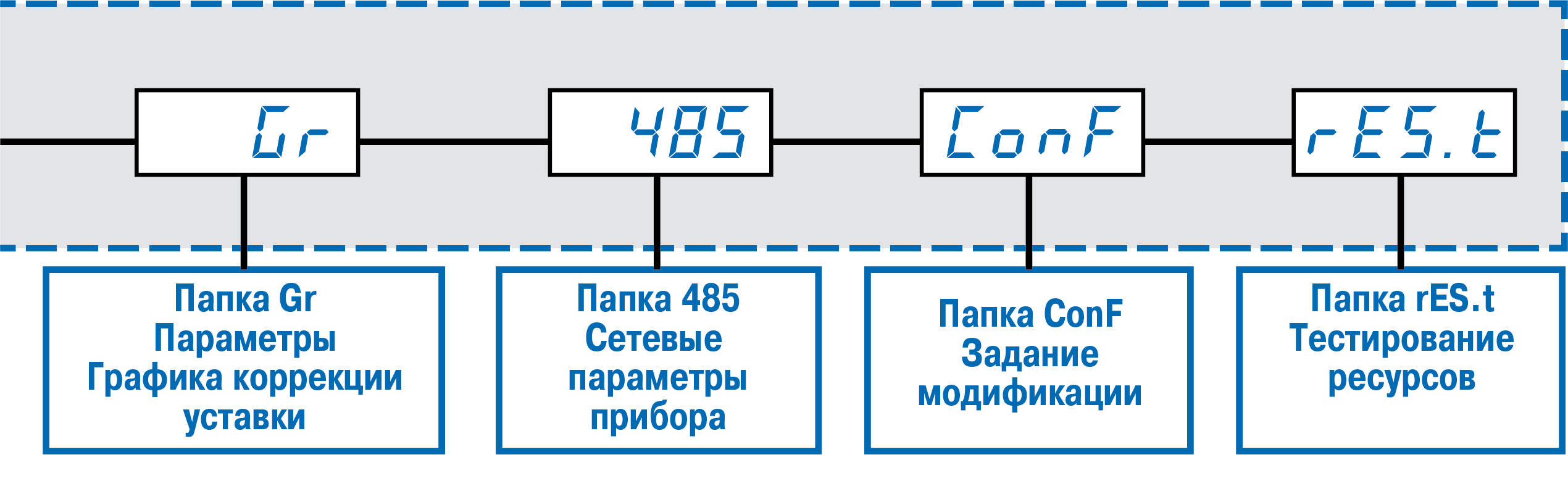
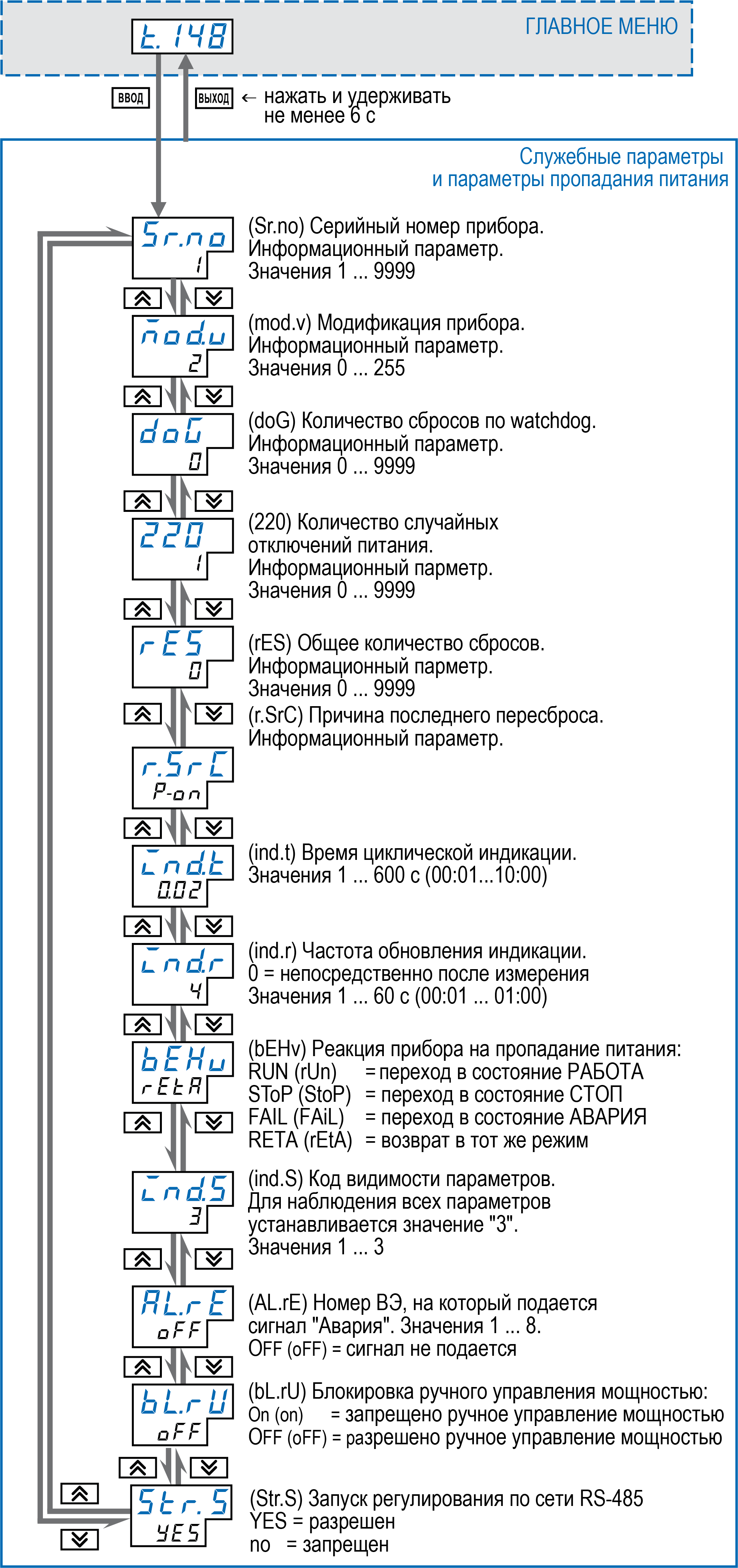
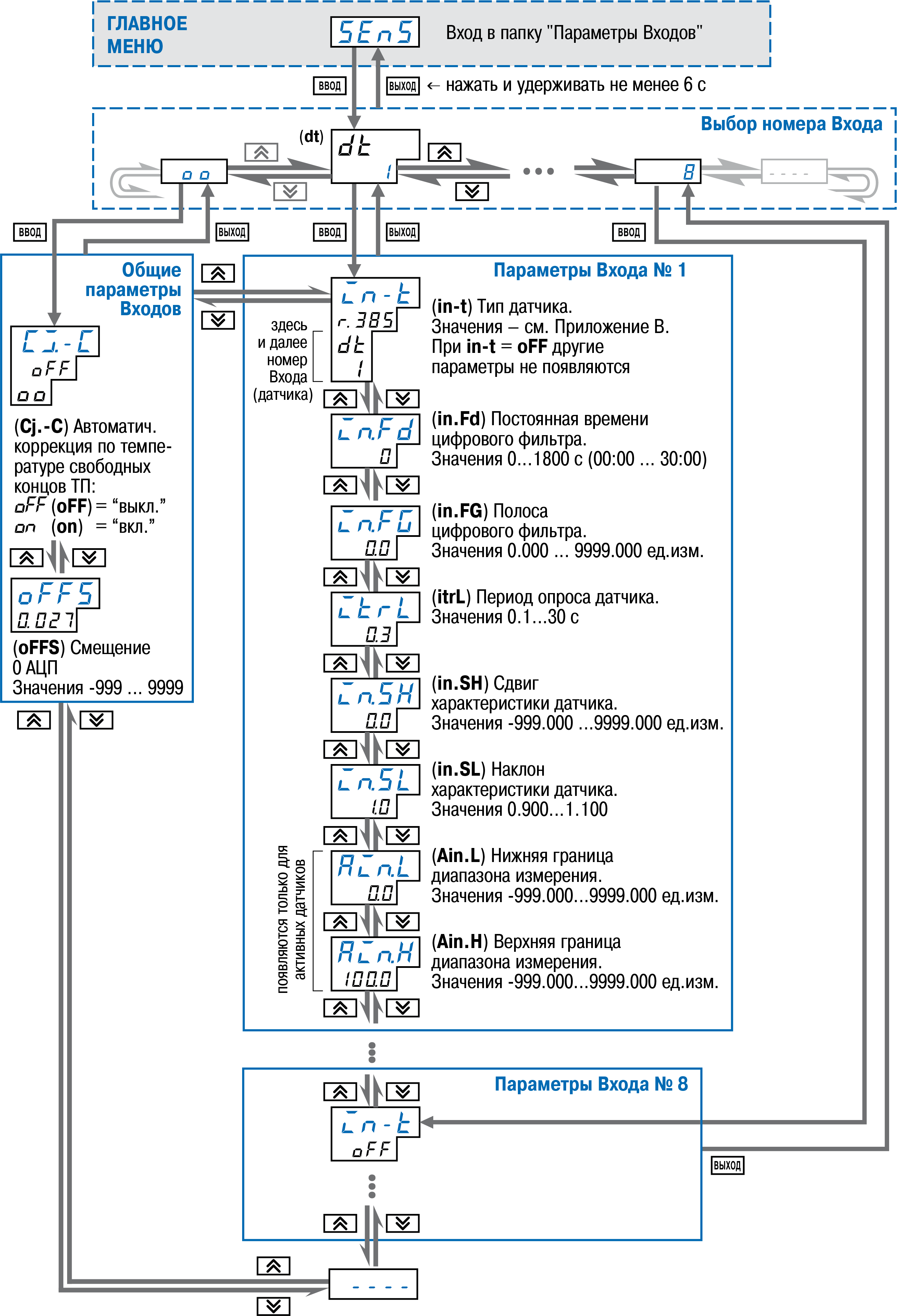

Особенностью задания параметра n.obj является то, что значение параметра можно увеличивать или уменьшать только путем последовательного (пошагового) изменения на 1. При входе в режим редактирования параметра для изменения его значения, например, увеличения с 2 на 5, следует сначала увеличить его значение на 1, т. е. с 2 до 3. Затем следует выйти из режима редактирования параметра и повторять увеличение, пока не будет достигнуто нужное значение.
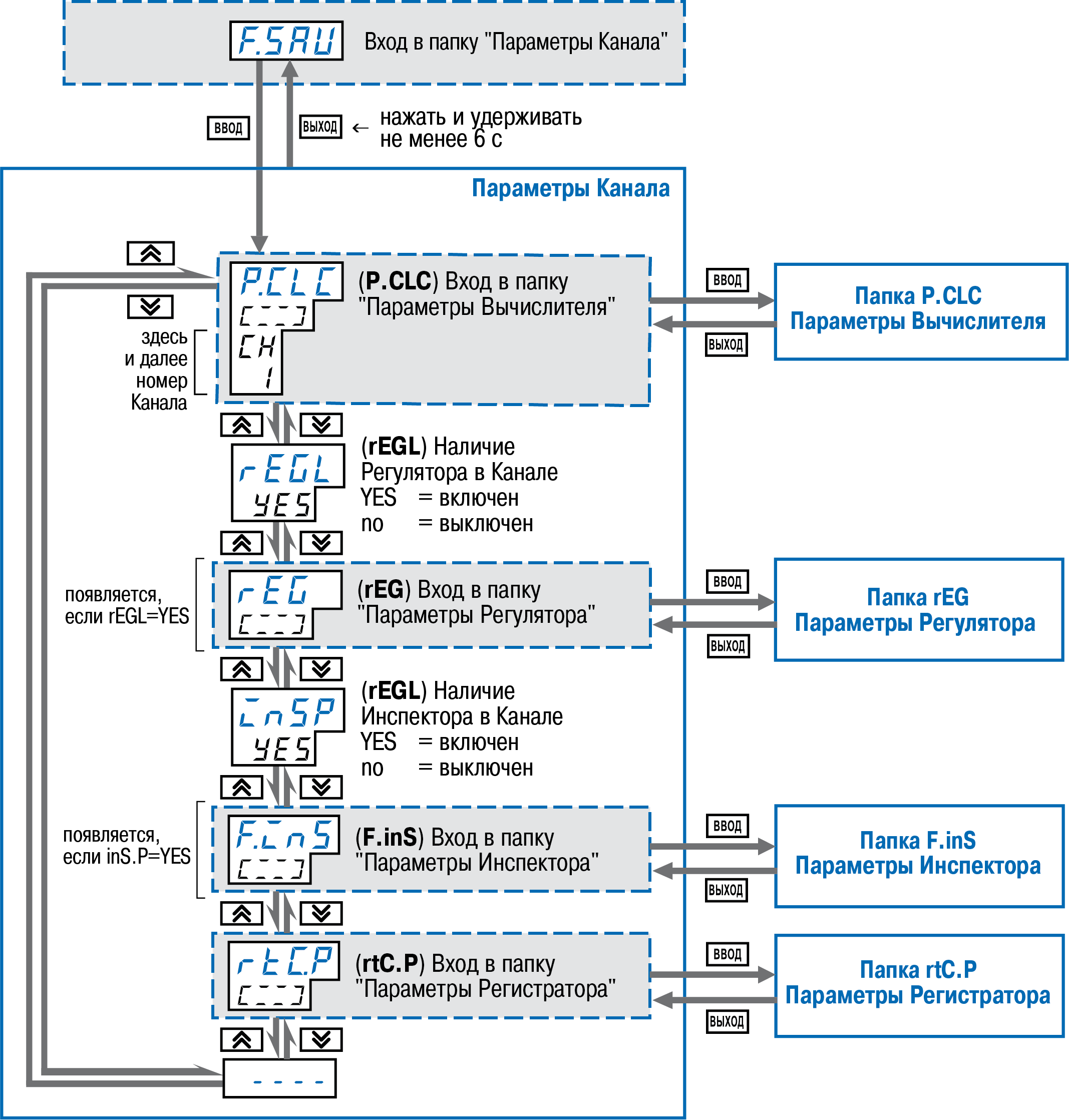
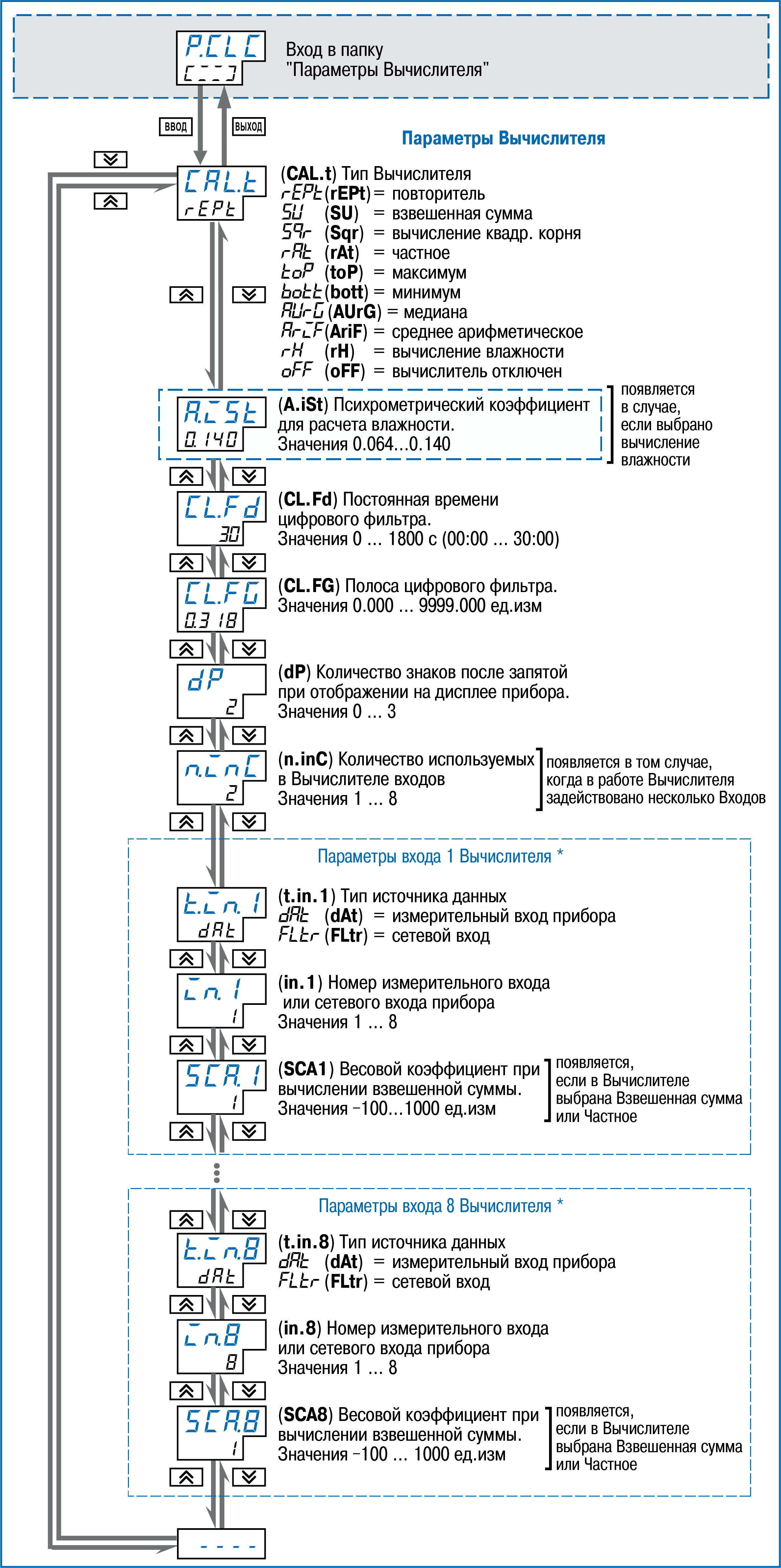
*) Количество папок «Параметры входа n-го Вычислителя» равно значению параметра n.in.C.
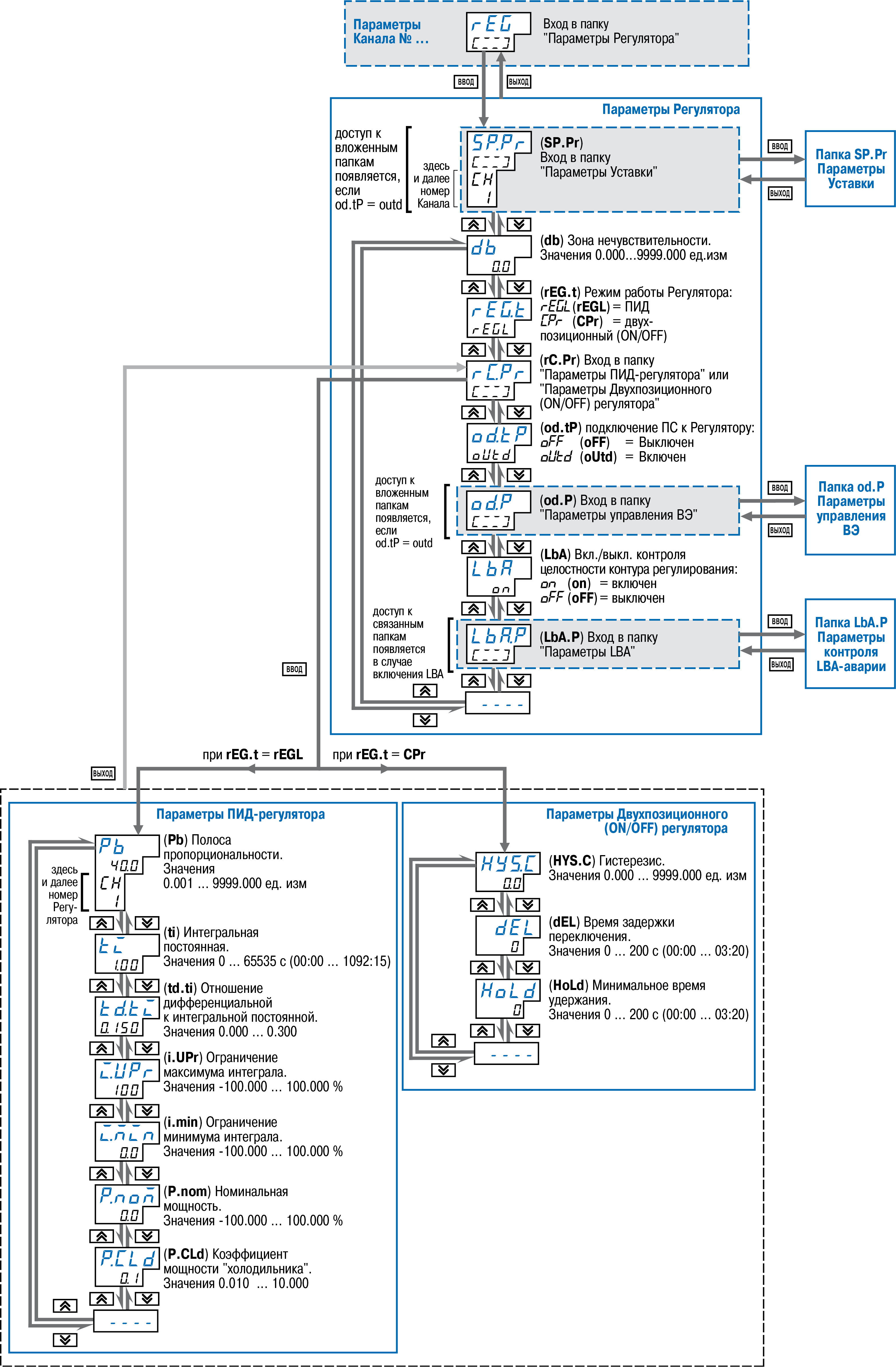
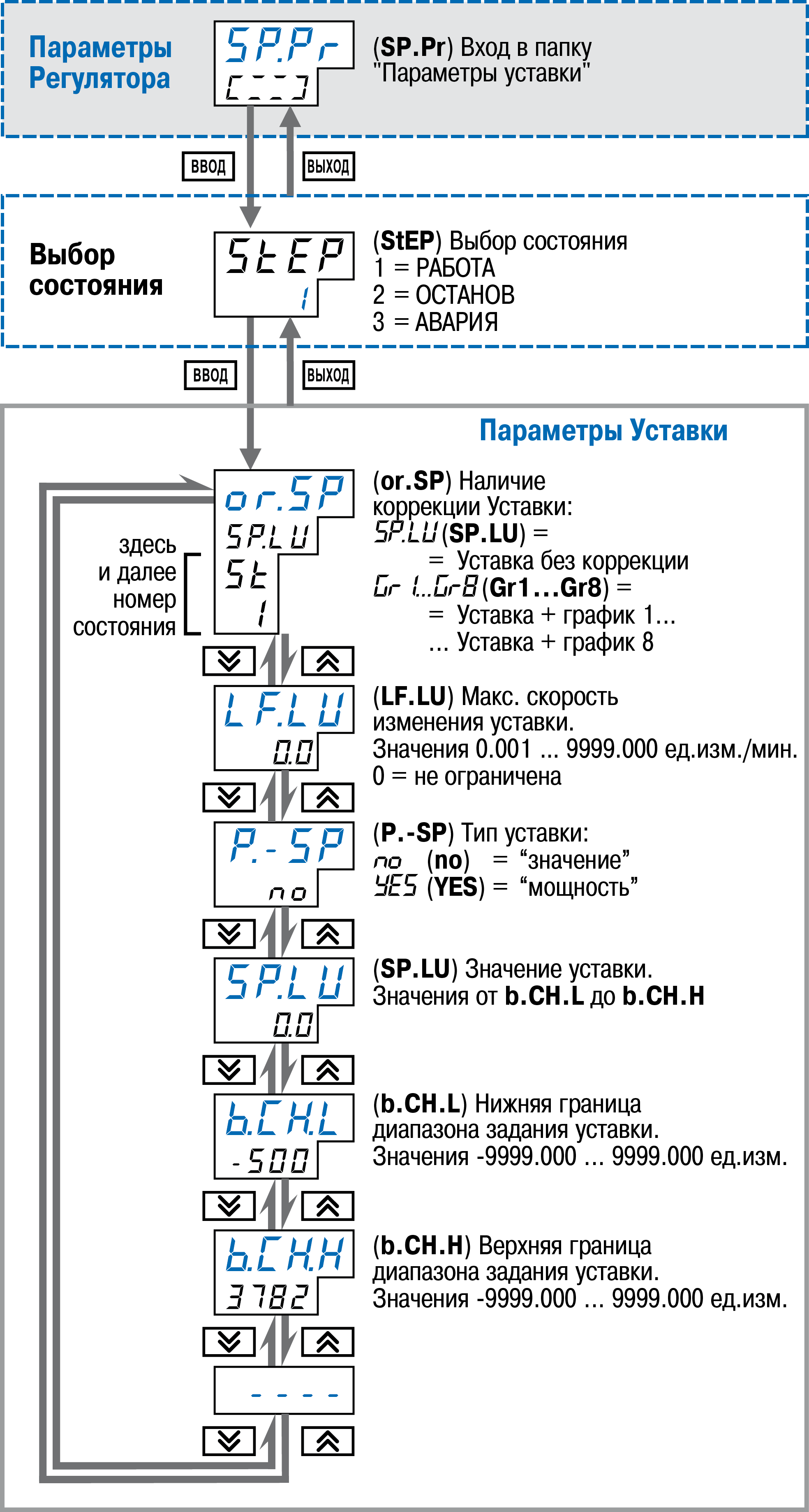
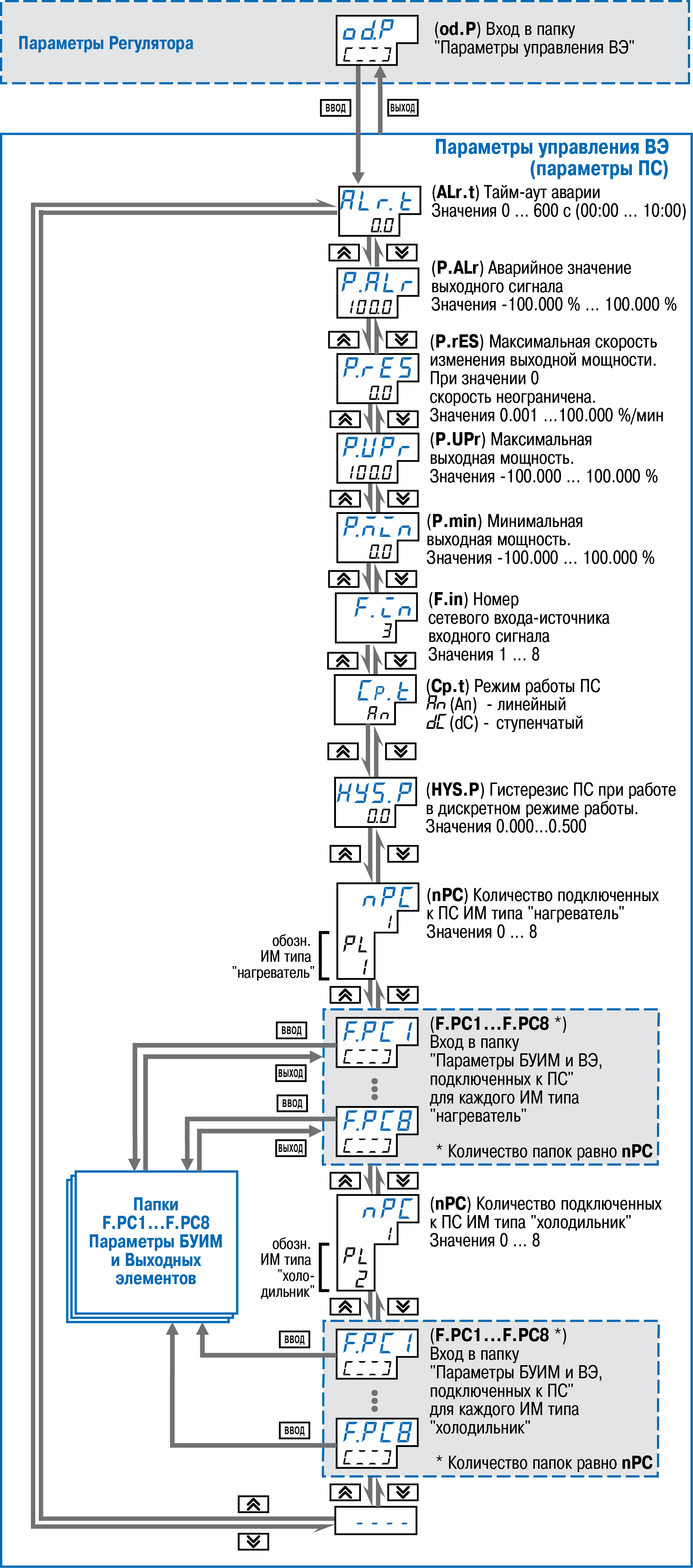
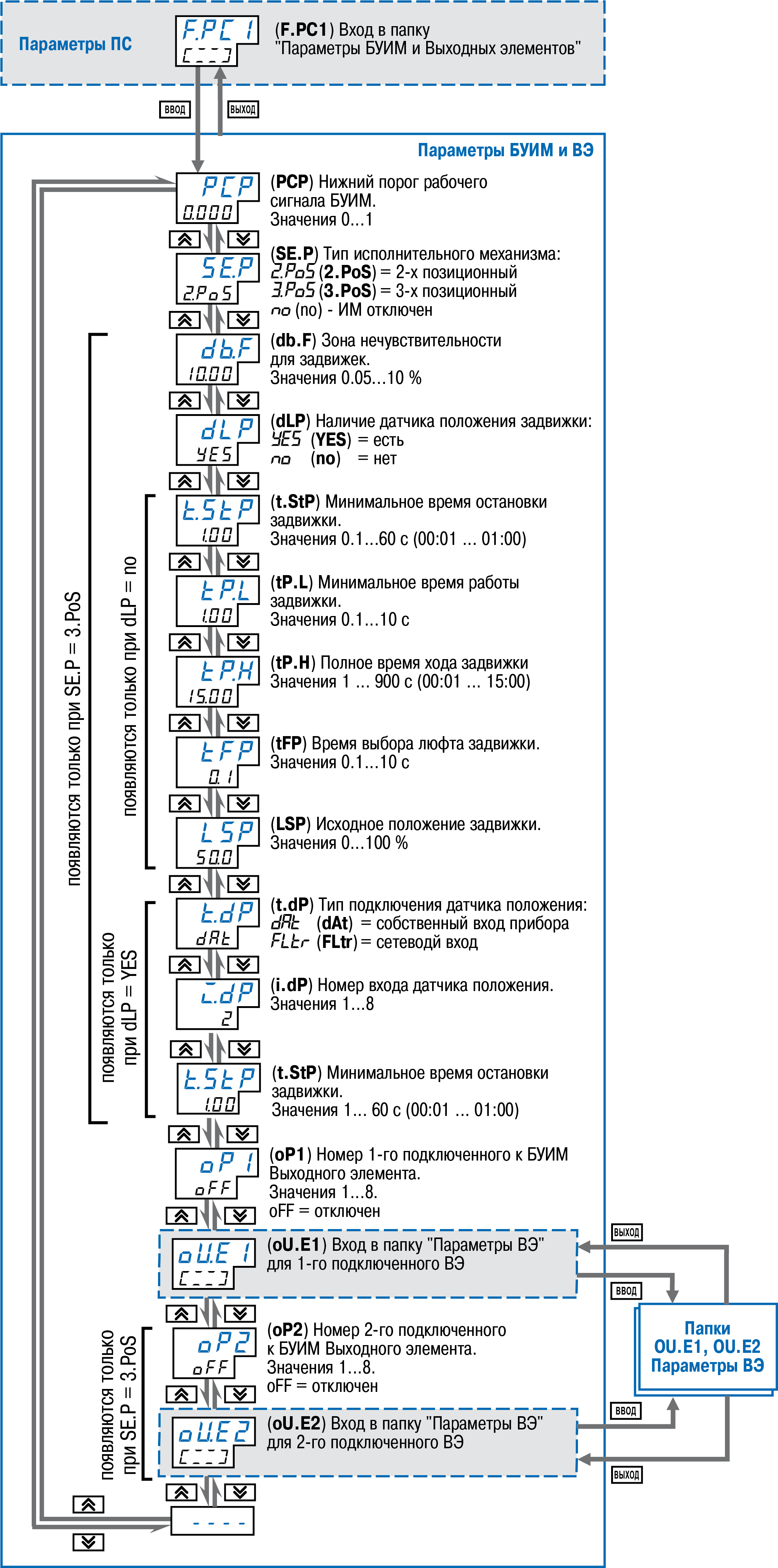
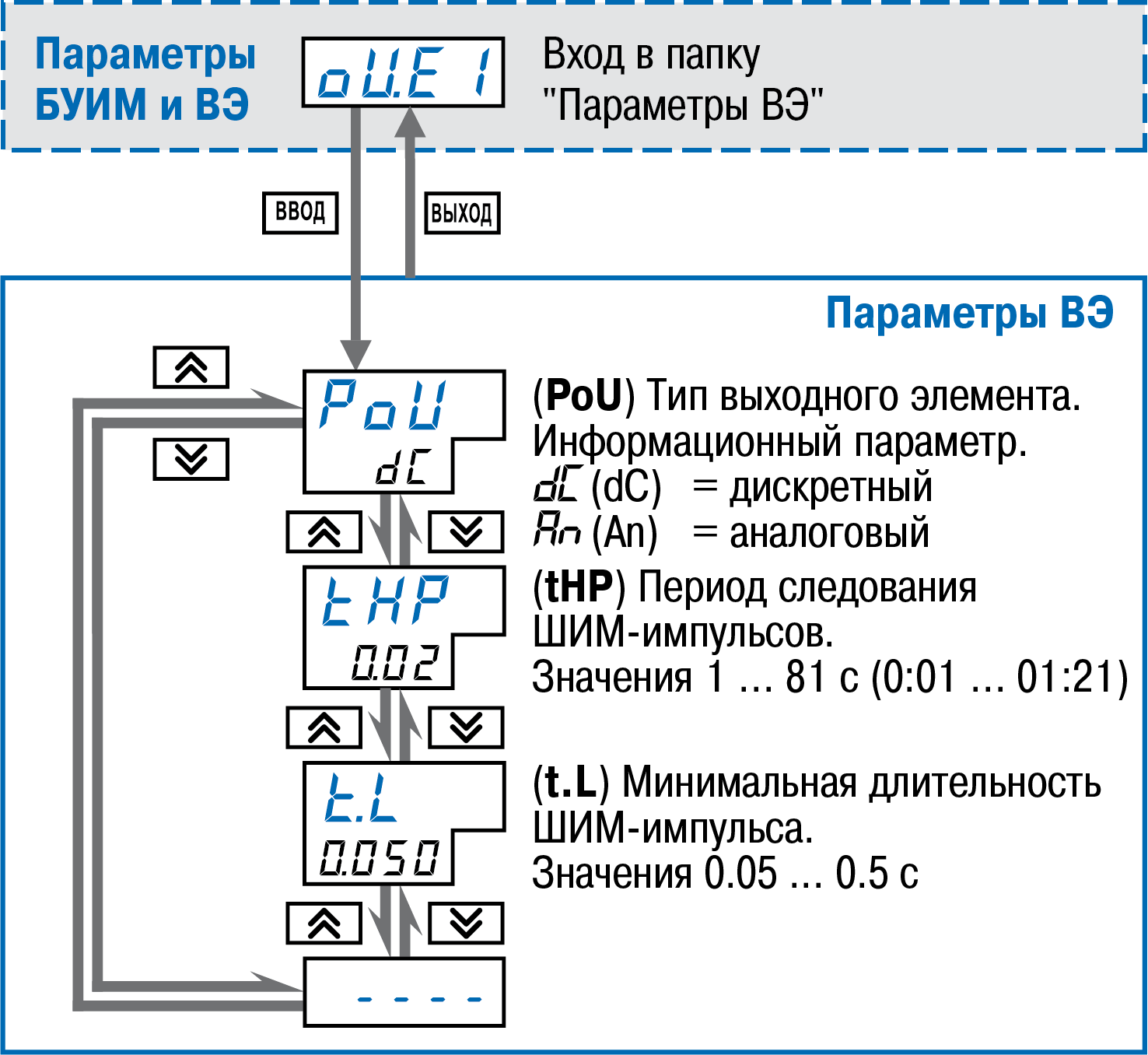
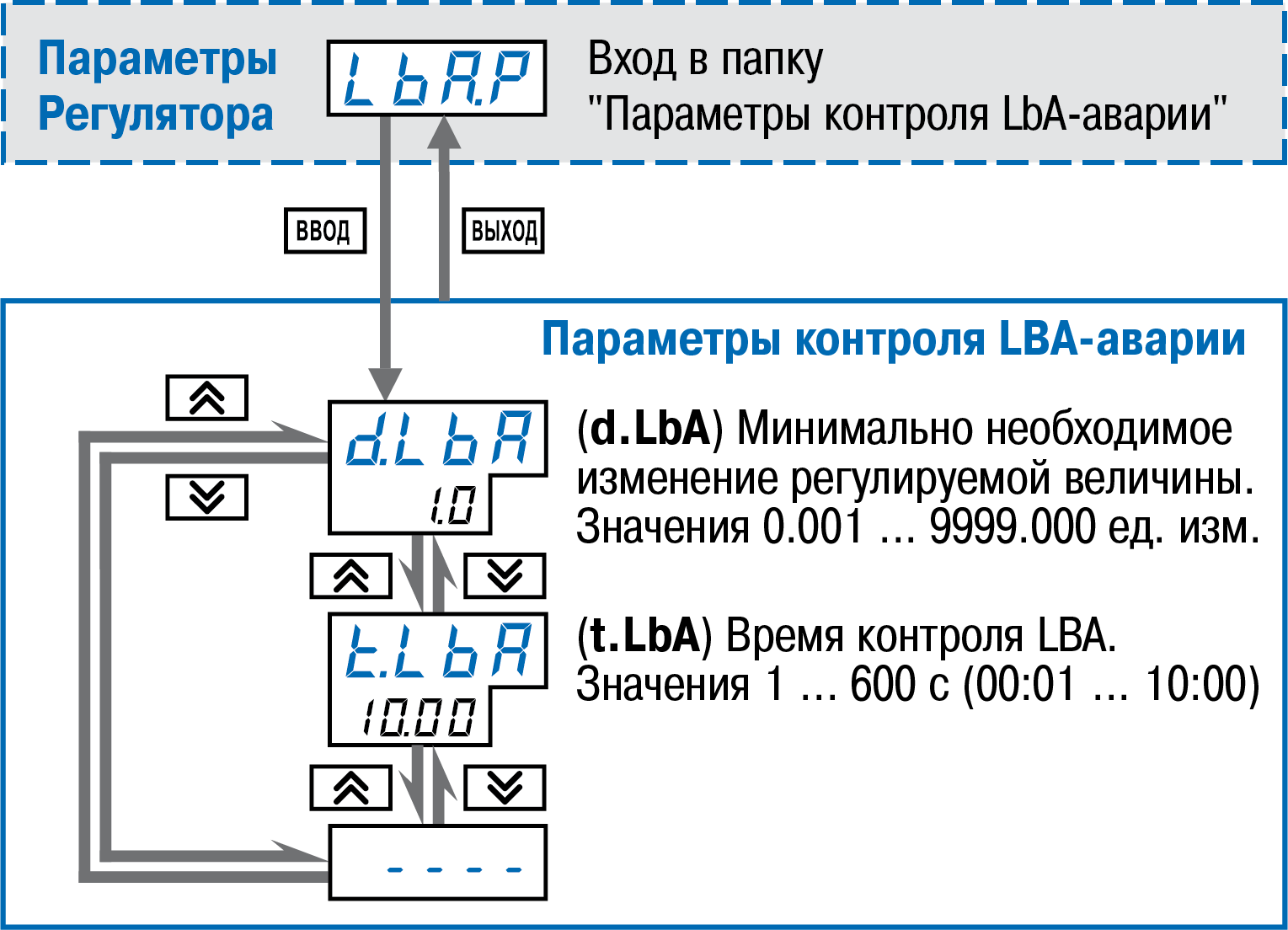
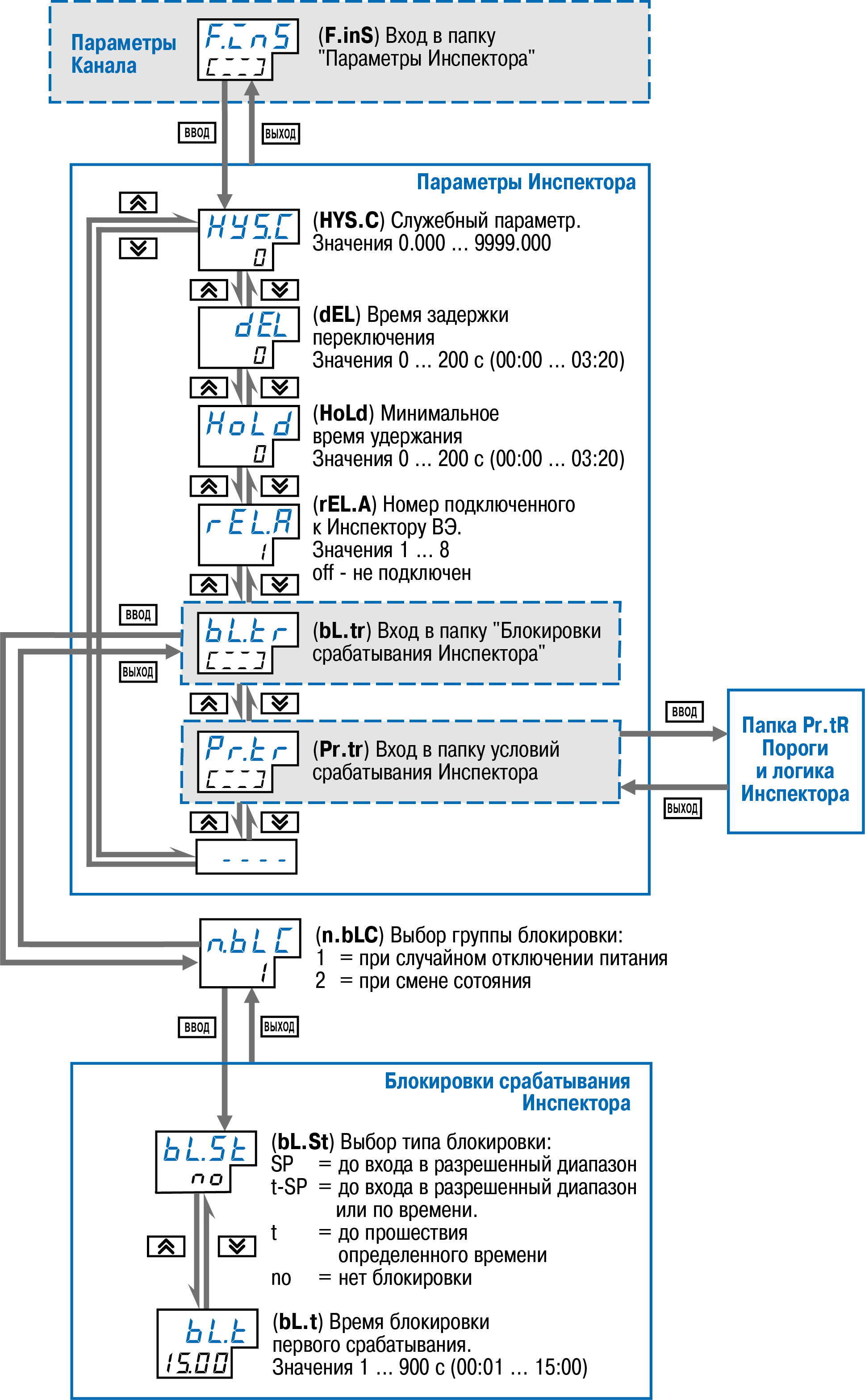
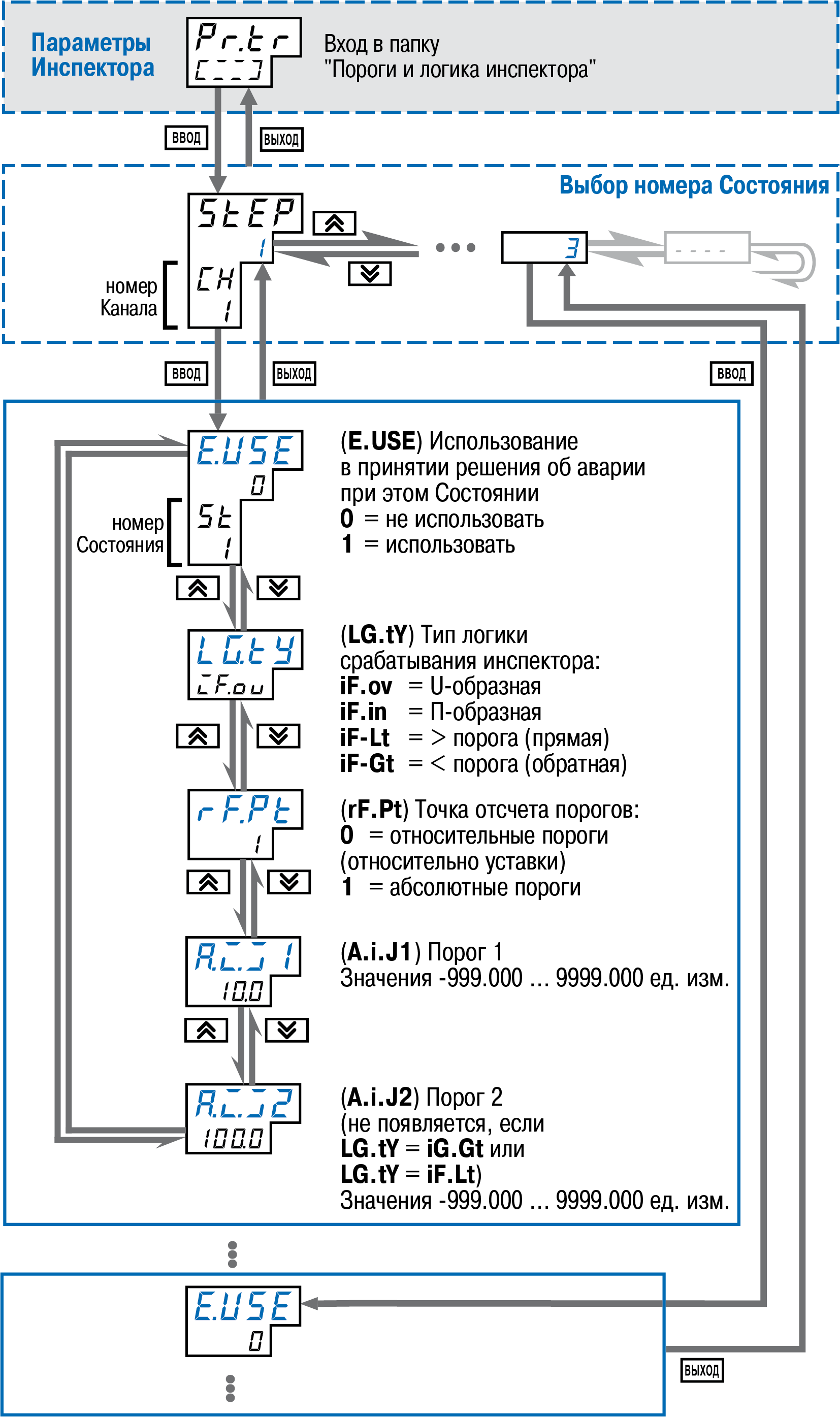
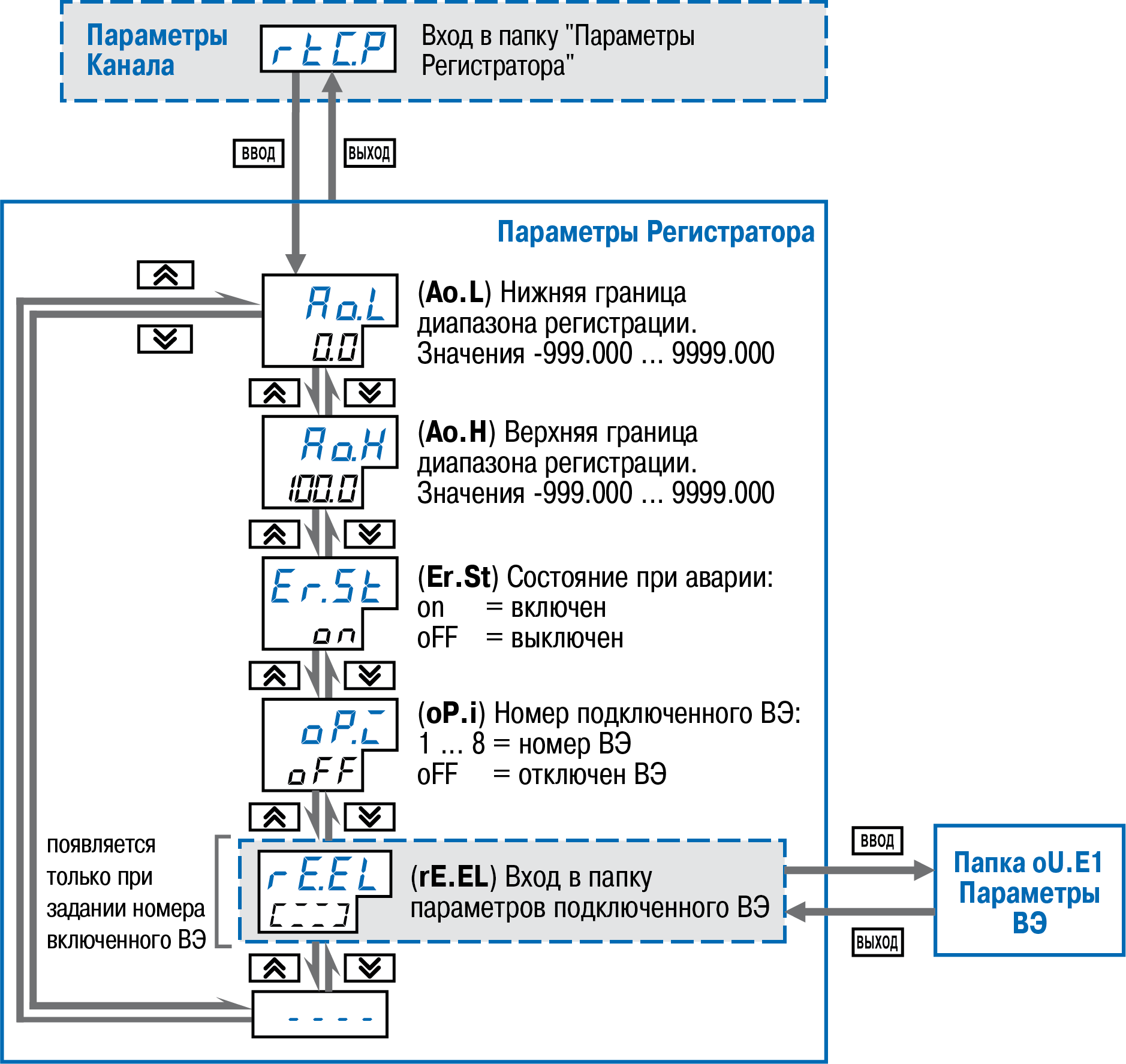
Папка rE.EL в Регистраторе и папка oU.E1 в Регуляторе позволяют открыть папку подключенного ВЭ.
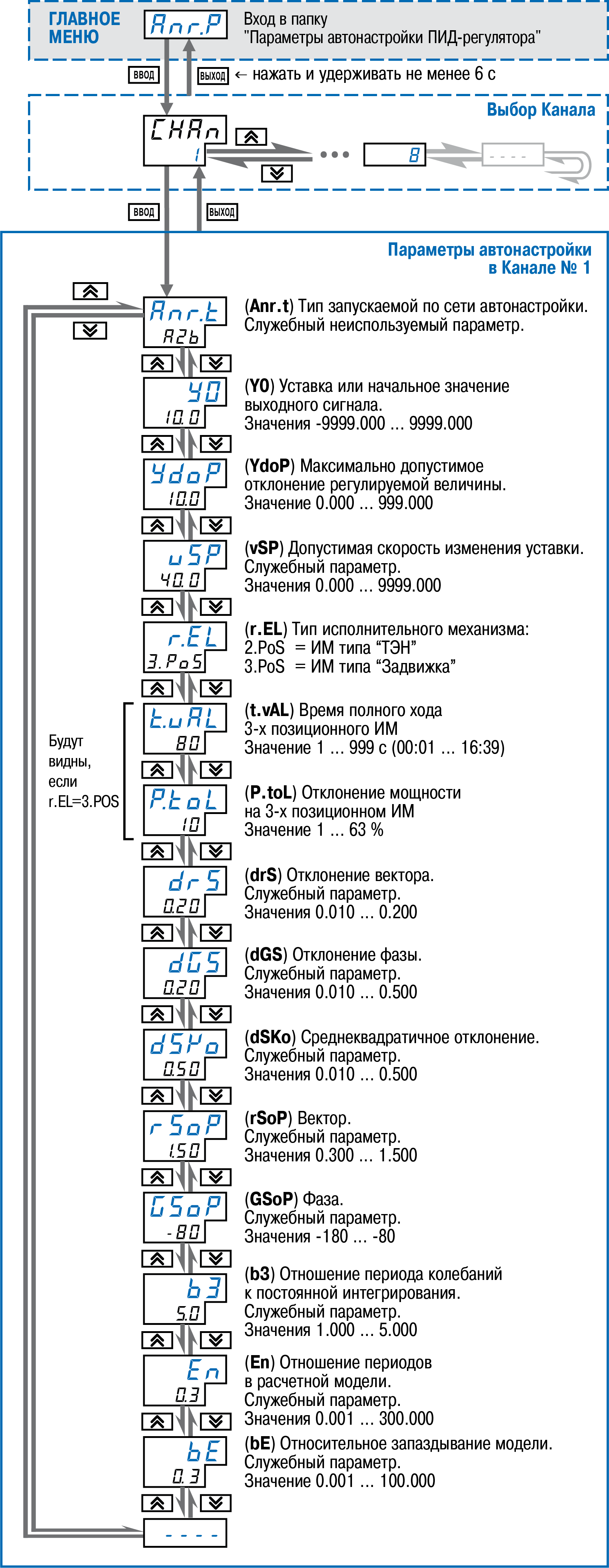
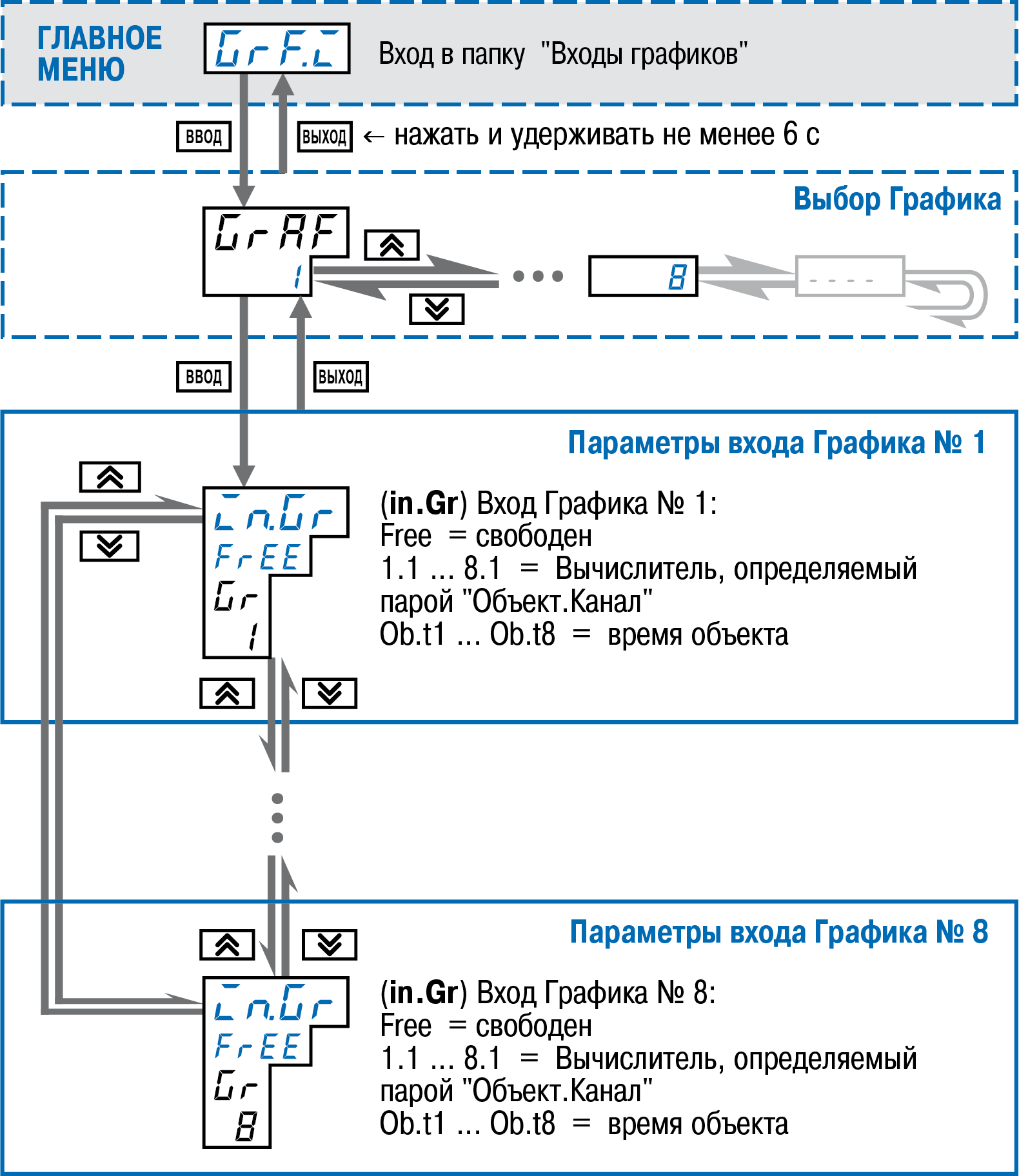

Для редактирования графиков следует
Выбрать номер графика.
Выбрать номер узловой точки.
Задать координату (X) нового узла графика с помощью кнопок
+ ;Задать значение коррекции (Y).
ВниманиеУзлы графика задаются последовательно от начальной точки до конечной. При появлении новой начальной точки нумерация точек автоматически изменяется, т. к. в графике точки сортируются по возрастанию Х.
Для редактирования корректирующих значений (координата Y) следует:
Выбрать номер графика.
Выбрать номер узловой точки.
Нажать кнопку
в
режиме Х графика.Задать новое значение коррекции (Y).
Для удаления узловой точки графика следует:
Выбрать номер графика.
Выбрать номер узловой точки.
Удалить точку с помощью клавиш
+
Для редактирования значений входных величин графика (координата X):
Выбрать номер узловой точки.
Удалить узловую точку.
Создать новый узел графика с необходимыми координатами.
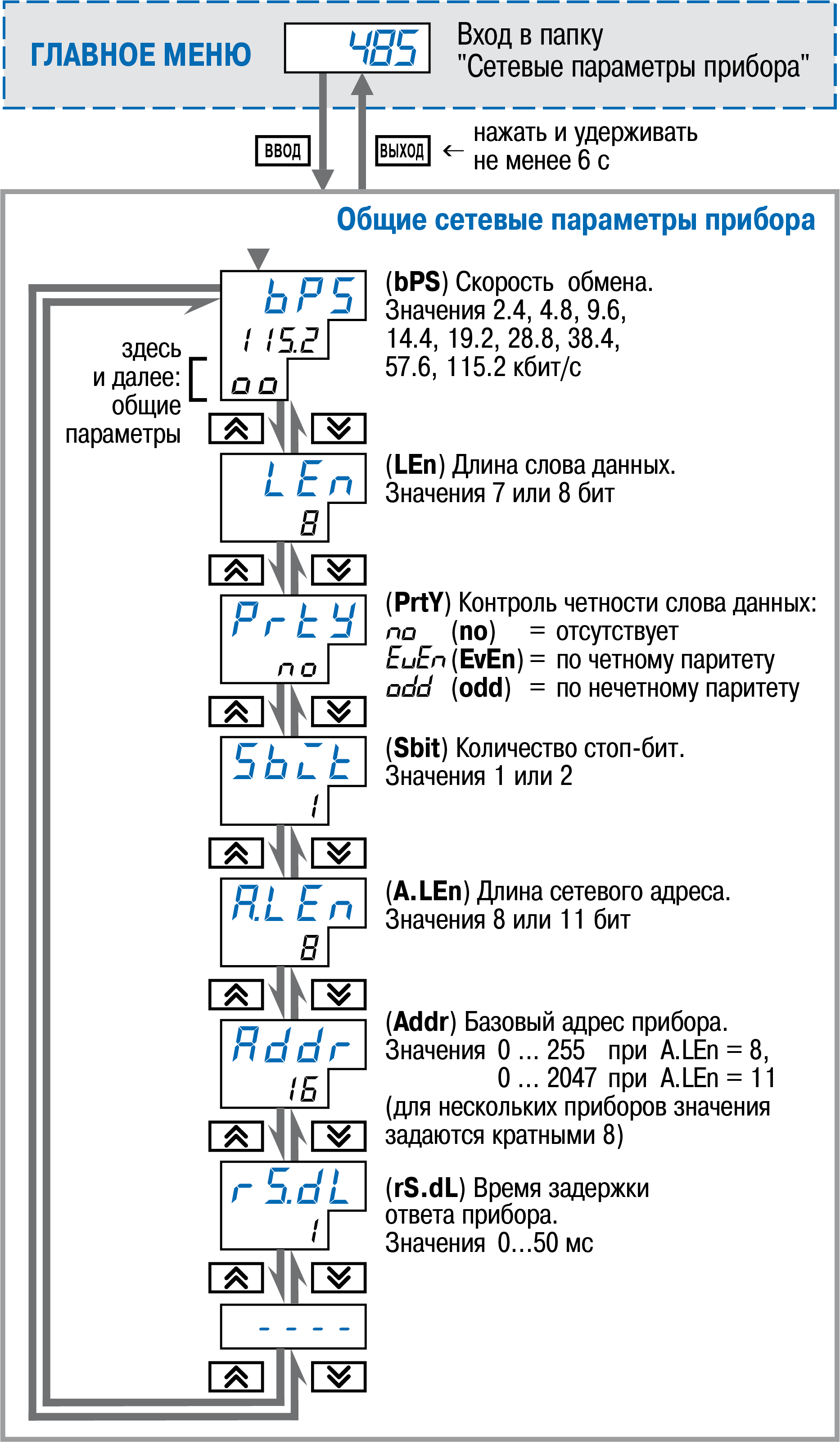
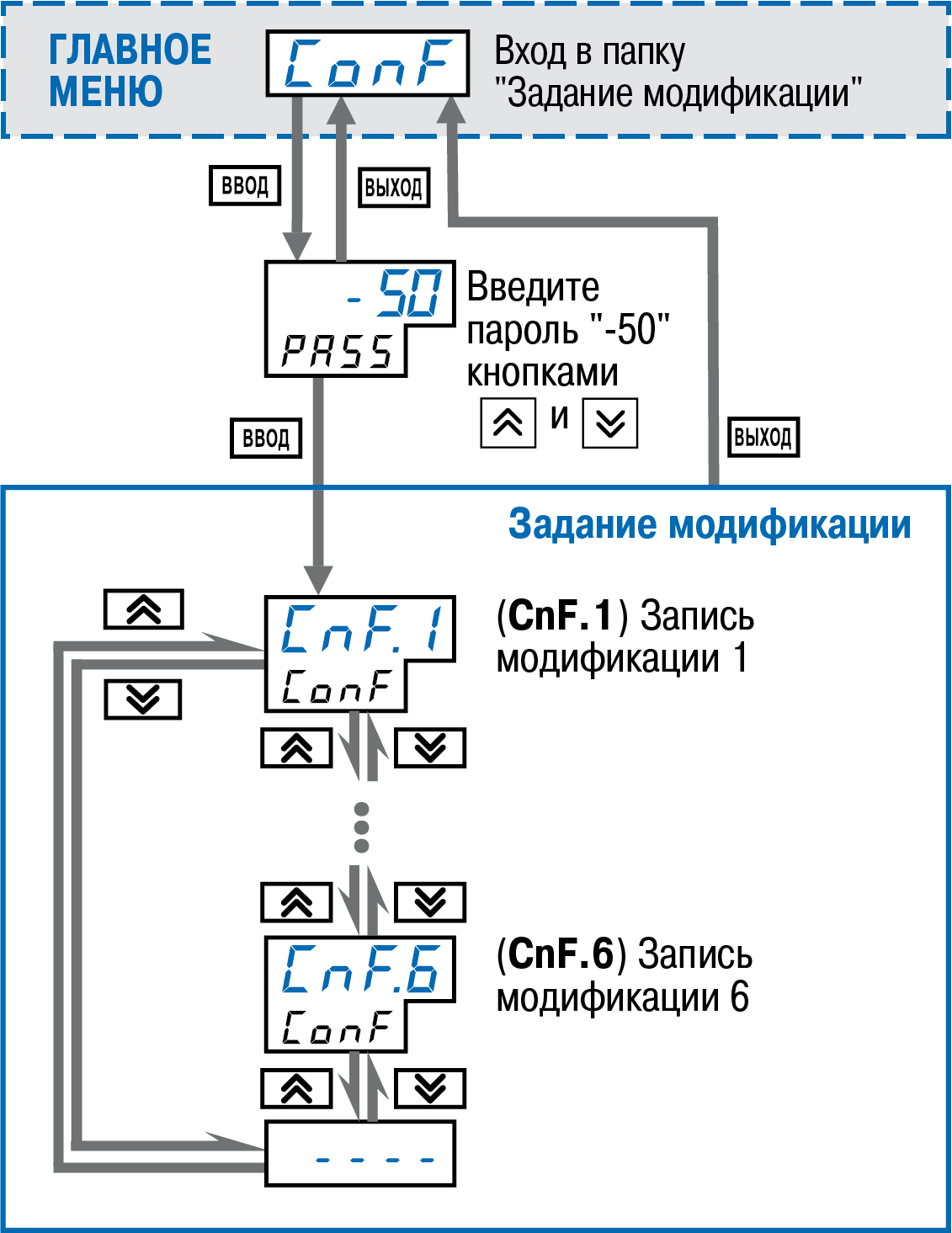
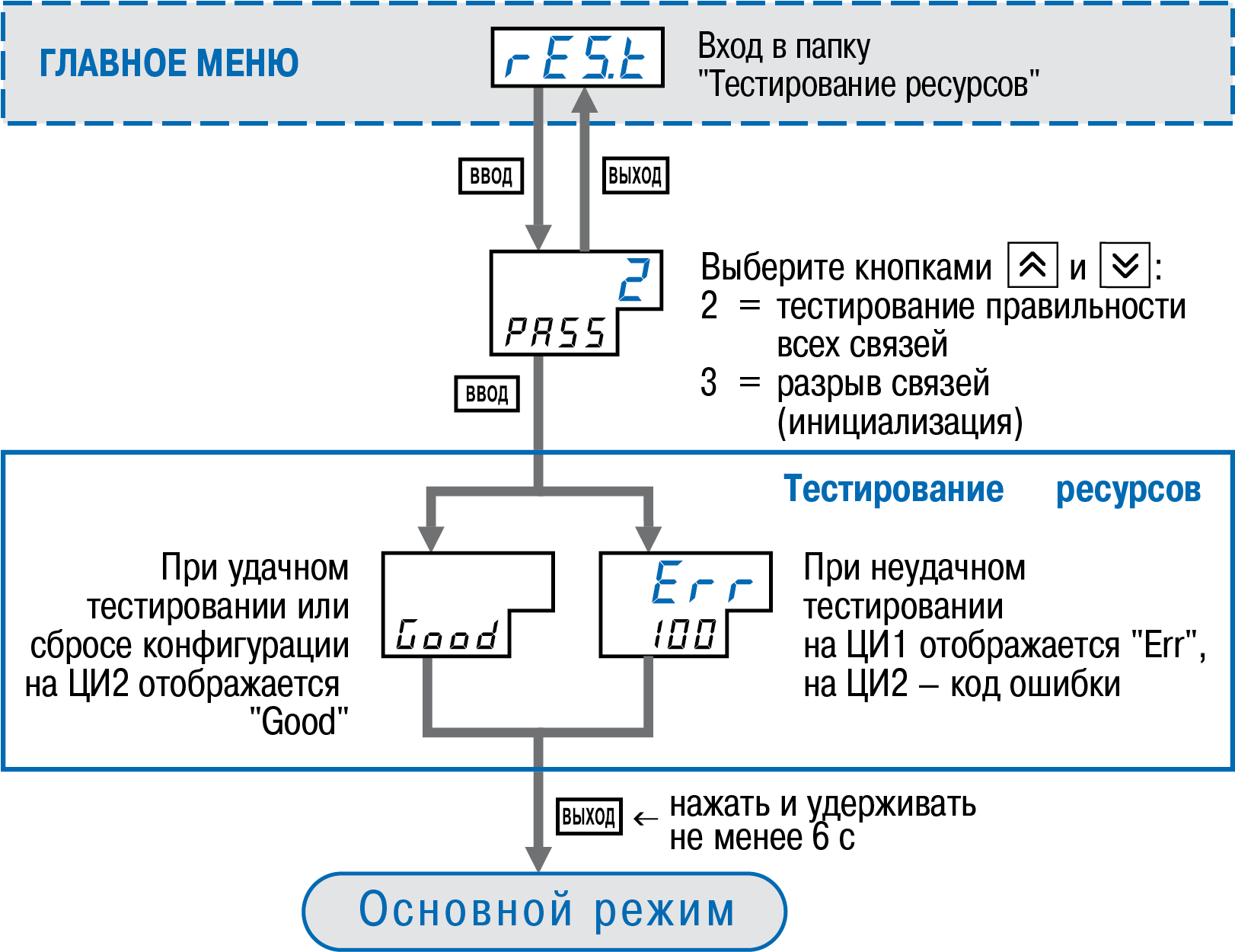
Описание ПО «Конфигуратор ТРМ148»
Назначение Конфигуратора
Программа «Конфигуратор ТРМ148» (далее — Конфигуратор) предназначена для задания конфигурации прибора при помощи ПК. Конфигуратор позволяет считывать из прибора, редактировать и записывать конфигурации в прибор. Также Конфигуратор имеет возможность работать с файлами конфигураций, которые можно сохранять или загружать на диск ПК.
+ + . Несоблюдение этого условия и,
тем более, подобное конфигурирование в процессе работы не гарантируют
нормальной работы.Есть возможность работы с Конфигуратором без подключенного прибора. Например, в Конфигуратор может быть загружена любая из шести модификаций ТРМ148, отредактирована в соответствии с конкретными потребностями и сохранена в файл. Впоследствии можно подключить прибор к ПК, установить между ними связь и записать ранее подготовленную Конфигурацию в прибор.
Процесс редактирования конфигураций допускает возможность полностью стереть конфигурацию с использованием процедуры инициализации, а затем осуществить конфигурирование (задание параметров) в строгой технологической последовательности, при этом может быть, например, сохранена конфигурация с «пустыми» (незаполненными) полями параметров, которая затем послужит отправной точкой для создания конфигураций.
При наличии прибора для упрощения работы перед запуском Конфигуратора рекомендуется подключить прибор к компьютеру. Тогда Мастер конфигураций ТРМ148 позволит автоматически установить между ними связь и считать параметры из прибора.
Системные требования
Для запуска Конфигуратора необходим ПК следующей конфигурации:
Операционная система – Windows 2000/XP/7/8/10;
Тип процессора – Pentium 4 и выше;
Объем ОЗУ – 512 Мб (рекомендуемый 1024 Мб);
Объем дисковой памяти – не менее 50 Мб;
Наличие портa USB.
Установка Конфигуратора
Для установки Конфигуратора следует:
Скачать архив с Конфигуратором по
ссылке https://owen.ru/documentation/123. Извлечь из архива ехе-файл установщика.
Запустить .ехе-файл и, следуя его инструкциям, установить Конфигуратор на ПК.
Начало работы
Установка связи с прибором
Выполнить предварительные операции:
Подключить ТРМ148 к компьютеру по интерфейсу RS-485 через адаптер АС4–М.
Соединить ПК и АС4–М с помощью USB кабеля. Установить на ПК драйвер АС4–М:
Подать питание на прибор.
и удерживать ее 2 – 3 с.Для настройки связи следует:
Запустить Конфигуратор. При запуске запустится Мастер конфигураций ТРМ148, и на появится окно «Связь с прибором» (см. рисунок ниже). Программа предлагает проверить или изменить сетевые параметры прибора.
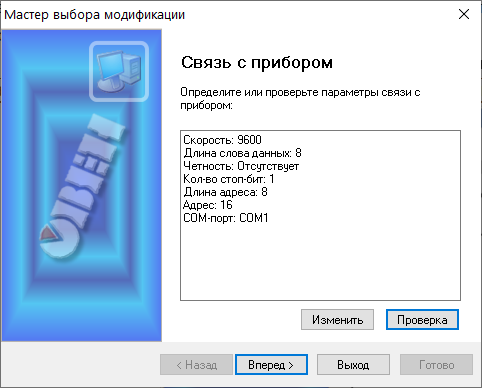
Мастер выбора конфигураций. Окно «Связь с прибором» Проверка наличия связи с прибором запускается нажатием кнопку Проверка.
Если связь прибора с компьютером установлена, появится сообщение с информацией об имени подключенного прибора и версии его прошивки.
Нажав кнопку OK, и перейти к п. 3.
В случае появления сообщения о том, что связь не установлена, необходимо закрыть окно сообщения, нажав кнопку OK, выяснить причину отсутствия связи и попробовать ее устранить по таблице.
Если связь по неизвестным причинам установить не удается, необходимо обратиться к в службу техподдержки. ПримечаниеВсе ТРМ148 поставляются с одинаковыми сетевыми настройками. Программа «Конфигуратор ТРМ148» при первом запуске имеет «по умолчанию» те же сетевые настройки. Поэтому при первом подключении прибора к компьютеру связь должна устанавливаться автоматически. При последующих запусках программа начинает работать с сетевыми настройками, установленными на момент закрытия программы.
ПримечаниеВсе ТРМ148 поставляются с одинаковыми сетевыми настройками. Программа «Конфигуратор ТРМ148» при первом запуске имеет «по умолчанию» те же сетевые настройки. Поэтому при первом подключении прибора к компьютеру связь должна устанавливаться автоматически. При последующих запусках программа начинает работать с сетевыми настройками, установленными на момент закрытия программы.После нажатия кнопки Вперед Конфигуратор пытается считать номер модификации из прибора.
Если номер модификация успешно считан, на экране появляется окно с приглашением выбрать уровень доступа (см. рисунок ниже)
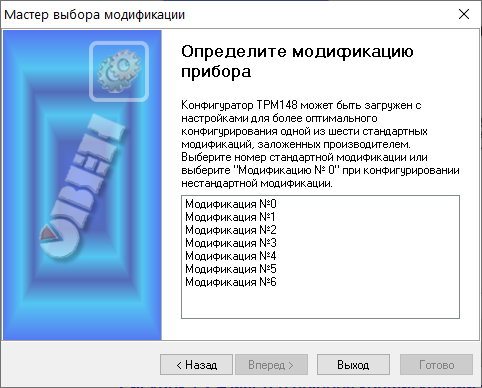
Мастер выбора конфигураций. Окно выбора конфигураций прибора Если номер модификацию считать не удается, появляется соответствующее сообщение. После нажатия кнопки OK – открывается окно с приглашением выбрать модификацию прибора из списка (см. рисунок выше).
Пользователь выбирает модификацию своего прибора (например, «Модификация № 1») и нажать кнопку Вперед, – открывается окно с приглашением выбрать уровень доступа.
Появляется окно выбора уровня доступа:
Минимальный – для просмотра и редактирования заданных параметров уставок;
Средний – для задания параметров Конфигурации ТРМ148 (доступ ко всем параметрам, определяющим настройки модификации);
Полный – для свободной настройки прибора.
Для Полного уровня доступа следует вводить пароль.
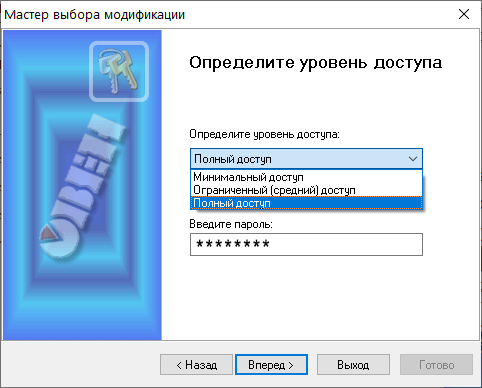
Мастер выбора конфигураций. Окно определения уровня доступа Для продолжения нажать кнопку Вперед.
Открывается окно, завершающее подготовку к созданию Конфигурации (см. рисунок ниже).
Если прибор подключен, устанавливаются флаги «Включить режим автоматического чтения» и/или «Режим автоматической записи».
Мастер выбора конфигураций. Окно подготовки к загрузке модификаций После нажатия кнопки Готово программа открывает лист «Деревья параметров» рабочего окна Конфигуратора, в котором создана новая Конфигурация
Причины отсутствия связи прибора с компьютером и способы их устранения
Причины отсутствия связи прибора с компьютером и способы их устранения
Причина отсутствия связи | Способы устранения неисправностей |
|---|---|
Неправильно указан COM-порт, к которому подключен адаптер сетевого интерфейса | В Мастере создания конфигураций: нажать клавишу Изменить. В открывшемся окне для параметра Порт компьютера Port в поле «Значение» выбрать нужный COM-порт. Путь для задания COM-порта – в окне Конфигуратора |
Неправильно подключен прибор или адаптер | Проверить правильность подключения:
|
Сетевые настройки прибора и программы не совпадают | Изменить сетевые настройки Конфигуратора или прибора так, чтобы они совпадали. Сетевые настройки прибора проверить и изменить с помощью кнопок на лицевой панели прибора . Изменение сетевых настроек Конфигуратора в Мастере создания конфигураций: нажать кнопку Изменить. В открывшемся окне задать новые значения параметров |
Прибор «завис» | Перезагрузить прибор по питанию |
Занятость виртуального COM-порта другим приложением | Закрыть приложение, занимающее порт |
Уровни доступа
Всего в программе имеется три уровня доступа, два из которых могут быть защищены паролями.
При желании пользователь может изменить пароли доступа с помощью команды меню Сервис | Смена паролей.
Уровни доступа к настройкам
Уровень доступа | Пароль (заводской) | Предоставляемые возможности | Для кого рекомендовано |
|---|---|---|---|
Минимальный | Нет, и задать нельзя | Обеспечен доступ только к минимальному количеству параметров, необходимых оператору | Оператор |
Средний | Не задан («пустой») | Доступ ко всем параметрам, определяющим настройки модификации | Технолог, обслуживающий персонал |
Полный | 1 | Ограничений нет. Доступ ко всем параметрам прибора, имеется возможность изменить конфигурацию прибора, разрешена инициализация прибора | Наладчик системы, системный интегратор |
При запуске на любом уровне доступа, - при этом прибор должен быть подключен к компьютеру и запитан - Конфигуратор автоматически попытается считать часть конфигурации с прибора. Если программе не удается установить связь с прибором, и первые 5 параметров считываются неудачно, то происходит прекращение автоматического считывания. После установления связи прибора с программой можно восстановить режим автоматического чтения, установив галочку в пункте меню Режимы программы | Режим автоматического чтения.
Описание интерфейса
Рабочее окно программы
Рабочее окно программы содержит корневой каталог Конфигурация ТРМ148, который включает в себя ветви – вложенные каталоги, имеющие иерархическую структуру:
Параметры прибора;
Опрос оперативных параметров;
Параметры компьютера.
Ветвь Параметры прибора содержит полный набор параметров для определения конфигурации прибора. Параметры прибора сгруппированы в папки, внутри которых идет дробление по логическим единицам (устройствам, модулям и др.).
Список параметров данной ветви, который появляется на экране, зависит от уровня доступа.
На уровне доступа «минимальный» появляются только параметры следующих папок:
Общие параметры
;Уставки
.
На уровне доступа «средний» появляются параметры папок, определяемых этим уровнем. Перечень параметров, предоставляемых Программой для редактирования, является необходимым и достаточным для задания выбранной модификации прибора.
На уровне доступа «полный» появляются все параметры ТРМ148.
Ветвь Опрос оперативных параметров позволяет просматривать и сохранять параметры текущего состояния прибора (оперативные параметры): измеряемые величины, значения выходной мощности Регуляторов, состояние прибора (Работа, Стоп и т. д.) и др.
Ветвь Параметры компьютера содержит 2 папки:
Сервисные параметры программы информационного характера (версия программы «Конфигуратор ТРМ148» и версия операционной системы);
Сетевые параметры программы для настройки сетевого интерфейса RS-485.
В каждой строке иерархической структуры представлена информация об одном параметре, а в столбцах приведены характеристики этого параметра. Характеристики параметров папок Параметры прибора и Параметры компьютера представлены в таблице ниже.
Характеристики параметров
Характеристика | Описание |
|---|---|
Название параметра | Словесное описание параметра, отражающее его суть, назначение |
Имя параметра | Содержит до четырех латинских букв, которые могут быть разделены одной или несколькими точками. Используется при настройке прибора кнопками на лицевой панели |
Значение параметра | Может быть представлено в числовом или текстовом формате. Задается вручную (для большинства числовых значений) или выбирается из списка (для текстовых и некоторых числовых значений) |
Атрибут Редактирование | Может принимать значения «Редактируемый» или «Нередактируемый». Значение «Нередактируемый» блокирует попытку изменить значение параметра |
Атрибут Владелец | Может принимать значения «Пользователь» или «Завод». Значение «Завод» установлено на заводе-изготовителе и запрещает изменение атрибута Редактирование, т. е. один атрибут защищает другой. Этот атрибут изменяет только завод-изготовитель |
Ошибки ввода-вывода | Указывает причину ошибки в случае возникновения таковой, при этом параметр отмечается красным шрифтом |
Меню Конфигуратора
Меню Конфигуратора
Команда | Назначение | Клавиши |
|---|---|---|
Меню Файл | Работа с файлами конфигурации | — |
Новый | Создание новой конфигурации прибора (установка для всех параметров значения «нет данных») | Ctrl+N |
Новый уровень/ модификация | Загрузка текущей конфигурации на другом уровне доступа или переход к другой модификации | — |
Открыть | Открытие файла (с расширением «*.148») | Ctrl+O |
Сохранить | Сохранение конфигурации в файл | Ctrl+S |
Сохранить как | Сохранение конфигурации в файл с другим именем | — |
Экспорт в DBF | Экспорт таблицы значений параметров в формат DBase-III | — |
Импорт из DBF | Импорт таблицы значений параметров из формата DBase-III | — |
{Список файлов} | Список 4-х последних файлов с конфигурациями | — |
Выход | Закрытие программы | — |
Меню Прибор | Работа с прибором (чтение/запись параметров) | — |
Считать все параметры | Считывание значений всех параметров ветви «Параметры прибора» из прибора в компьютер | Alt+R |
Записать все параметры | Запись всех параметров из компьютера в прибор | Alt+W |
Записать только измененные | Запись измененных значений параметров из компьютера в прибор. После редактирования значения параметр помечается зеленым цветом, после записи в прибор шрифт становится черным, после неудачной записи – красным | Alt+U |
Сравнить с параметрами в приборе | Сравнение значений параметров прибора и открытой конфигурации | Alt+C |
Записать только параметры с ошибками | Запись только тех параметров, которые не записались при предыдущей команде записи (эти параметры помечены красным цветом) | — |
Считать все параметры выделенной папки | Считывание значений всех параметров выделенной папки из прибора в компьютер | Alt+Ctrl+R |
Записать все параметры выделенной Папки | Запись значений всех параметров выделенной папки из компьютера в прибор | Alt+Ctrl+W |
Записать только измененные параметры папки | Запись измененных значений параметров выделенной папки из компьютера в прибор. После редактирования значения параметр помечается зеленым шрифтом, после записи в прибор шрифт становится черным | Alt+Ctrl+U |
Сравнить параметры папки с параметрами в приборе | Сравнение значений параметров выделенной папки прибора и открытой конфигурации | Alt+Ctrl+C |
К предыдущему проблемному параметру дерева | Выделение в дереве параметров предыдущего параметра, считанного из прибора или записанного в него с ошибкой. Такой параметр помечен красным цветом, в поле «Ошибки ввода-вывода» указывается причина ошибки | Alt+↑ |
К следующему проблемному параметру дерева | Выделение в дереве параметров следующего параметра, считанного из прибора или записанного в него с ошибкой. Такой параметр помечен красным цветом, в поле «Ошибки ввода-вывода» указывается причина ошибки | Alt+↓ |
Юстировка входов | Вызов процедуры юстировки входов прибора | — |
Графики уставки | Доступ к формам «График коррекции уставки» для выбранного из выпадающего списка конкретного графика | — |
Опрос отдельного параметра | Доступ к отдельным параметрам прибора | Alt+S |
Установление связи с прибором (vEr, dEv) | Считывание имени прибора и номера версии его прошивки. Используется для проверки связи с прибором | Alt+N |
Меню Режимы программы | Определение режимов работы программы (записи, чтения, отображения параметров) | — |
Показывать линейные индексы | Показывает индексы параметров. Линейные индексы параметров необходимы при создании новых конфигураций. При включении этой опции у оперативных параметров появляются их линейные индексы и имена. Это необходимо при работе по сети с другими приборами или scada - системой. | — |
Режим автоматического чтения | В этом режиме программа автоматически считывает из прибора значения параметров открываемой папки. Для отключения режима необходимо снять флажок перед данным пунктом меню. Это необходимо, например, при работе с Конфигуратором при отключенном приборе | — |
Режим немедленной записи | В этом режиме запись значения параметра осуществляется сразу после его ввода | — |
Не передавать атрибуты параметров | В этом режиме прибор не производит чтения и записи атрибутов параметров. Режим немного ускоряет работу, но может привести к ошибкам ввода-вывода, если в приборе установлены атрибуты защиты | — |
Скрывать свернутое окно | В этом режиме при сворачивании окна конфигуратора наименование программы будет помещено в трэй | — |
Сетевые параметры программы | Открывает окно, в котором можно изменить сетевые параметры программы | — |
Toolbar | Отображается панель инструментов | — |
Statusbar | Отображается панель подсказок (внизу окна) | — |
Преобразователь | Установка типа преобразователя RS-485/RS-232. Возможен вариант установки автоматического преобразователя, что ускоряет обмен по сети | — |
Меню Сервис | Дополнительные опции (инициализация прибора, смена паролей и пр.) | — |
Инициализировать прибор | Восстановление в приборе заводских установок, стирание текущей конфигурации | Alt+I |
Послать команду APLY | Посылает команду перехода прибора на новые сетевые настройки | Alt+A |
Смена паролей | Изменение паролей для полного и среднего уровней доступа | — |
Запуск/Остановка регулирования | Управление запуском/остановкой прибора по сети | — |
Экспорт списка параметров в HTML | Позволяет создать список параметров прибора в формате HTML | — |
Экспорт протокола измерений в Excel | Позволяет экспортировать протокол опроса оперативных параметров в MS Excel | — |
Меню Справка | Справочная информация о Конфигураторе | — |
О программе... |
Панель инструментов Конфигуратора
Панель инструментов Конфигуратора
Пиктограмма | Соответствие команде пункта меню |
|---|---|
 | Новый из меню Файл |
 | Открыть из меню Файл |
 | Сохранить из меню Файл |
 | Прочитать все параметры из меню Прибор |
 | Записать все параметры из меню Прибор |
 | Записать только измененные из меню Прибор |
 | Записать только параметры с ошибками из меню Прибор |
 | Прочитать все параметры выделенной папки из меню Прибор |
 | Записать все параметры выделенной папки из меню Прибор |
 | Записать только измененные параметры папки из меню Прибор |
 | К предыдущему проблемному параметру из меню Прибор |
 | К следующему проблемному параметру из меню Прибор |
 | Инициализировать прибор из меню Сервис |
 | О программе... меню Справка |
Работа с папками и параметрами с использованием контекстного меню
В Главном меню Конфигуратора предоставляется возможность работы с выделенной папкой с использованием контекстного меню, появляющегося при нажатии правой клавиши мыши.
Контекстное меню содержит команды, позволяющие выполнить следующие операции:
Прочитать все параметры выделенной папки;
Записать все параметры выделенной папки;
Записать только измененные параметры выделенной папки;
Сравнить значения с реальными в пределах выделенной папки.
Аналогичные операции возможно провести и с отдельно выделенным параметром.
Работа с Конфигуратором
С помощью Конфигуратора можно создать несколько разных конфигураций для одного прибора, сохранить их и загружать в прибор ту конфигурацию, которая необходима в конкретный момент.
Можно создавать новую конфигурацию, не прерывая связь компьютера с прибором. До тех пор, пока новая конфигурация не будет записана в прибор, он будет работать со старой конфигурацией.
Перед записью новой конфигурации в прибор необходимо провести инициализацию прибора, т.е. удаление старой конфигурации.
Создание новой конфигурации
Новая конфигурация автоматически создается при старте Конфигуратора.
Если нужно создать конфигурацию вручную, то следует:
Из меню Файл выбрать пункт Новый (Ctrl+N) или нажать кнопку
на панели
инструментов.На листе «Деревья программ» рабочего окна программы появляется новый корневой каталог «Конфигурация ТРМ148 (Имя не задано)».
Последовательно сверху вниз разворачивая ветви дерева параметров, ввести нужные значения.
После завершения создания конфигурации сохранить ее в файл или загрузить в прибор.
Загрузка программы на другом уровне доступа или смена модификации
Последовательность действий при переключении на другой уровень/модификацию следующие:
Выбрать из меню Файл команды Новый уровень/модификация. Конфигуратор запрашивает подтверждение намерения переключиться на другой уровень/модификацию.
Подтвердить нажатием кнопки Да окне запроса программы. Запустится Мастер конфигураций ТРМ148.
Следовать инструкциям Мастера конфигураций. Загрузить необходимую модификацию или выбрать уровень доступа.
Считывание конфигурации из прибора
Считывание значений параметров из прибора сопровождается их отображением в рабочем окне Конфигуратора в определенной папке.
Для считывания конфигурации из прибора предусмотрены три режима: считывание всех параметров из прибора, считывание параметров только текущей папки или режим автоматического чтения.
Считывание всех параметров из прибора
Для
считывания всех параметров из прибора выбрать из меню Прибор команды Считать все параметры из прибора (Alt+R) или использованием
кнопки на панели инструментов.
Считывание всех параметров из прибора занимает длительное время. В процессе считывания на фоне главного окна программы появится информационное окно со статистическими сведениями о ходе процесса. Его закрытие означает, что процесс считывания параметров из памяти прибора окончен. В дереве параметров отобразятся считанные значения.
Режим автоматического чтения
Данный режим позволяет автоматически считать значения параметров, содержащихся в открываемой папке. Такое считывание происходит быстрее, чем считывание всех параметров из прибора. Считывание параметров в этом режиме возможно, если до этого значения параметров, содержащихся в открываемой папке, считаны не были (т.е. в поле «Значение» было указано «Нет данных»).
Включение режима автоматического чтения осуществляется установкой флага в меню Режимы программы в поле Режим автоматического чтения.
Считывание параметров только текущей папки
В процессе работы, например, при автонастройке ПИД-регулятора, прибор может изменить значения отдельных своих параметров. Они могут не совпадать со значениями, находящимися в Конфигураторе и считанными ранее. Поэтому может возникнуть необходимость обновить информацию о параметрах в папке Конфигуратор. При этом режим автоматического чтения не позволяет выполнить эту операцию, т. к. значения параметров в Конфигураторе уже есть.
Для считывания параметров только текущей
папки следует выделить папку (изменением подсветки) установив на ней
курсор и выбрать команду Считать все параметры выделенной папки из меню Прибор или нажать кнопку на панели инструментов.
Открытие конфигурации из файла
Последовательность действий при открытии конфигурации из файла следующие:
Выбрать из меню Файл команду Открыть (Ctrl+O) или использовать кнопку
·на панели инструментов.Появится окно «Выбор файла конфигурации». Выбрать файл нужный конфигурации.
В заголовке главного окна Конфигуратора и рядом с корневой папкой Конфигурация ТРМ148 отображается имя открытого файла.
После загрузки файла конфигурации в полях «Значение» параметров появятся значения, которые были записаны в файле.
Далее открытую конфигурацию можно записать в прибор.
Сохранение конфигурации в файл
Для сохранения конфигурации в файл следует:
Выбрать из меню Файл команду Сохранить (Ctrl+S) или Сохранить как или нажать кнопку
на панели инструментов.Появится окно, где необходимо задать имя и место расположения сохраняемого файла.
После нажатия кнопки Сохранить файл конфигурации сохраняется в выбранной местоположении. Файл конфигурации имеет расширение *.148.
Редактирование значений параметров
Для редактирования значения параметров следует:
Установить курсора мыши в поле «Значение» параметра, значение которого предполагается редактировать.
Перейти в режим редактирования значения двукратным нажатием левой клавиши мыши или нажатием клавиш клавиатуры Ctrl+Enter. Конфигуратор выделяет значение параметра и изменяет цвет его подсветки. Задать значение параметрас клавиатуры (для числового параметра) или выбирать его новое значение из раскрывающегося списка и завершить ввод нажатием клавиши Enter или однократным нажатием правой клавиши мыши на любом другом поле дерева параметров.
Если значение не помещается по ширине колонки, ее можно расширить до нужного размера. В верхней части экрана курсор устанавливается на границу двух столбцов в строке с заголовками, находится положение указателя, при котором отобразится двунаправленная стрелка, и, при удерживаемой нажатой левой кнопки манипулятора «мышка», передвигается граница столбца влево или вправо.
Измененные значения отображаются зеленым цветом и сохраняются только в памяти программы. При сохранении конфигурации в файле программа запомнит, какие параметры были записаны, какие – нет, какие – ошибочны. В дальнейшем изменения могут быть записаны в прибор или сохранены в файле.
Пример
Например, при вводе значения «392», т.е. 392 с, в Конфигураторе будет установлено значение «6:32», т.е. 6 мин. 32 с.Просмотр справки по параметру
Справка может быть вызвана нажатием клавиши F1 на клавиатуре ПК. Также справка автоматически появляется при вводе значения параметра через 2 – 3 с после начала ввода. Справка содержит наименование параметра, его символьное обозначение и комментарий, поясняющий функциональное назначение. При задании численного параметра справка содержит диапазон возможных значений.
Инициализация прибора
Перед записью новой конфигурации в прибор требуется произвести его инициализацию. Инициализация прибора корректно стирает старую конфигурацию и позволяет записать в него новую. При попытке записать новую конфигурацию без удаления старой может возникнуть конфликт значений параметров и прибор заблокирует запись части новых параметров.
Для инициализации прибора вызывать команду Инициализировать
прибор из меню Сервис. Также инициализация выполняется
при нажатии кнопки на
панели инструментов.
Запись значений параметров в прибор
При операции «Запись» происходит переписывание значений параметров из Конфигуратора в прибор. Можно записать в прибор все параметры, только измененные или избирательно отмеченные для записи. Кроме того, можно включить режим немедленной записи.
Запись всех параметров в прибор
Данный режим
выбирается при необходимости смены модификации прибора или записи
в него нестандартной конфигурации, созданной компанией-производителем.
Запись всех параметров производится командой Записать все параметры
в прибор (Alt+W) меню Прибор или нажатием кнопки на панели инструментов. На
фоне главного окна появится информационное окно со статистическими
сведениями о ходе процесса. Его закрытие означает, что процесс записи
параметров в память прибора окончен.
Запись только отредактированных параметров
Данный режим позволяет записать
только отредактированные параметры, даже если они находятся в разных
папках. Запись только отредактированных параметров производится командой Записать только измененные (Alt+U) из меню Прибор или нажатием кнопки на панели инструментов.
Запись параметров только текущей папки
Этот
режим записи параметров в прибор работает быстрее, чем запись всех
параметров. Можно записать параметры только текущей папки. Для записи
параметров только текущей папки следует выделить ее, установив на
ней курсор, и выбирать команду Записать все параметры выделенной
папки (Alt+Ctrl+W) из меню Прибор или нажать кнопку на панели инструментов.
Запись только отредактированных параметров текущей папки
Данный режим выбирается при необходимости записи конкретных
измененных параметров. Для записи только отредактированных параметров
текущей папки следует выделить ее, установив на ней курсор, и выбирать
команду Записать только измененные параметры папки (Alt+Ctrl+U) из меню Прибор или нажать кнопку на панели инструментов.
Режим немедленной записи
Конфигуратор записывает значение параметра в прибор сразу после его изменения. Включение режима немедленной записи осуществляется установкой флага в меню Режимы программы в поле Режим немедленной записи.
Просмотр значений оперативных параметров
В Конфигураторе реализована возможность регистрировать и сохранять на ПК параметры текущего состояния (оперативные параметры) прибора ТРМ148 при помощи Конфигуратора.
Для просмотра значений оперативных параметров следует:
Открыть папку Опрос оперативных параметров и установить флаги в полях около тех параметров, по которым предполагается получать информацию (см. рисунок ниже).
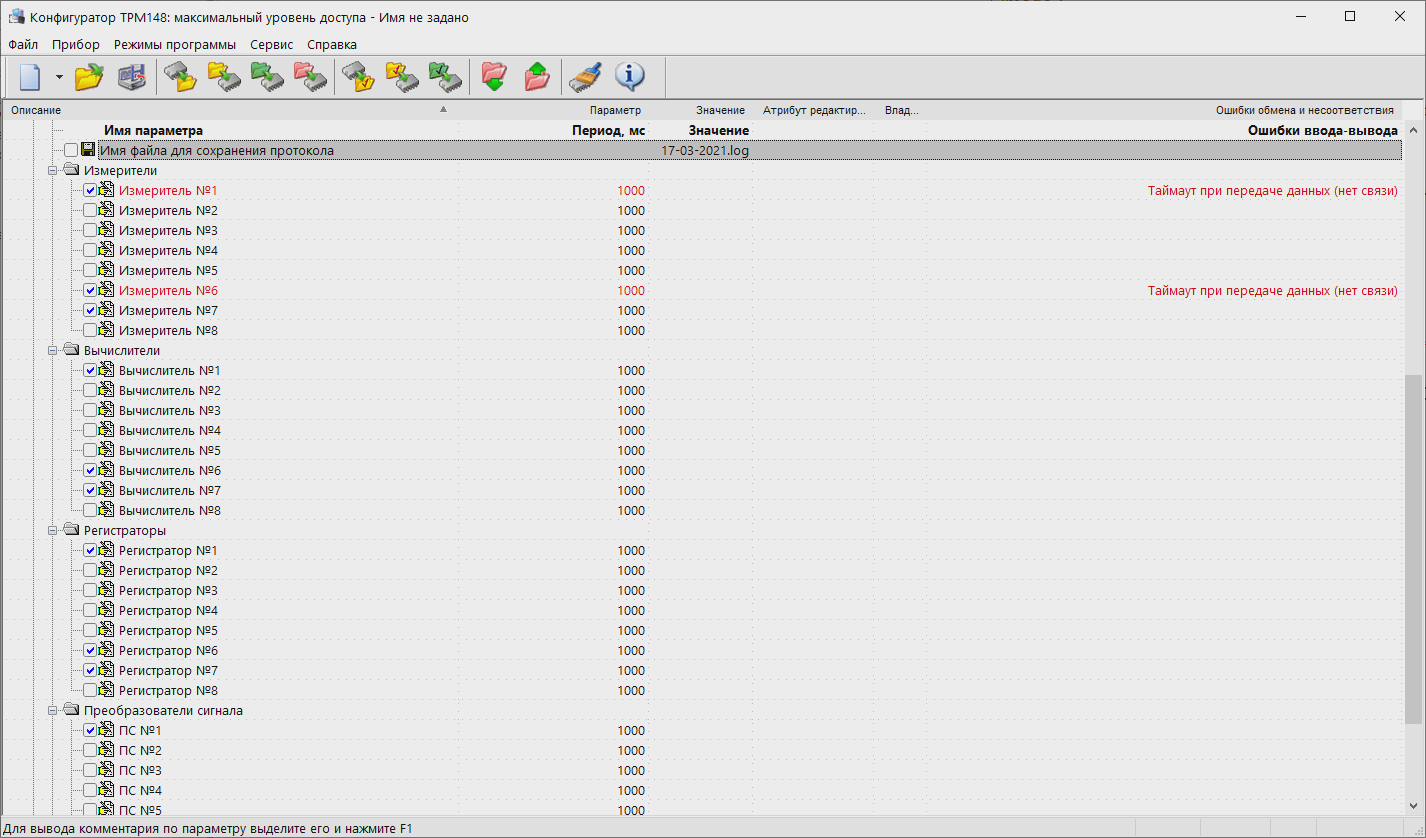
Регистрация оперативных параметров в Конфигураторе Задать период опроса параметров в миллисекундах. Период опроса по умолчанию составляет 1000 мс. Период опроса ограничен снизу пропускной способностью канала «Прибор-компьютер». Нижняя граница непостоянна и зависит от количества опрашиваемых параметров, скорости обмена и т.д.
В случае, если возникнет ошибка считывания параметра, в таблице будет выведена ее причина, при этом сам параметр отмечается красным шрифтом.
Измеряемые прибором значения выводятся в преобразованном виде:
для термометров и термопар выводится температура, измеренная в градусах по Цельсию;
для активных датчиков значения пересчитываются в соответствии с единицами диапазона измерения (см. параметры Ain.H и Ain.L).
В процессе измерения прибор контролирует работоспособность датчиков и в случае возникновения аварии в поле Значение выводит причину неисправности.
Значение выходной мощности Регулятора выводится в процентах.
Сохранение значений оперативных параметров в файл
Для сохранения в файл считанных с прибора значений оперативных параметров следует установить флаг перед строкой Имя файла для сохранения протокола. Сохранение в файл начнется немедленно. Файл создается в той же папке, где установлен Конфигуратор.
По умолчанию Конфигуратор предлагает имя файла для сохранения, состоящее из текущего месяца и даты. Имя файла указано в поле «Значение». Файл можно переименовать.
Данные сохраняются в текстовый файл с расширением *.log, который в дальнейшем может быть загружен в любую электронную таблицу. Для загрузки файла в Microsoft Excel следует воспользоваться командой Экспорт протокола измерений в Excel меню Сервис.
Создание и настройка конфигураций
Настройка цифровой фильтрации измерений
Для ослабления влияния внешних импульсных помех на эксплуатационные характеристики прибора предусмотрена цифровая фильтрация измерений.
Фильтрация осуществляется независимо для каждого Входа и проводится в два этапа.
На первом этапе фильтрации из текущих измерений входных параметров отфильтровываются значения, имеющие явно выраженные «провалы» или «выбросы».
Для этого прибор вычисляет разность между результатами измерений входной величины, выполненных в двух последних циклах опроса, и сравнивает ее с заданным значением, называемым Полосой фильтра. Если вычисленная разность превышает заданный предел, то производится повторное измерение, полученный результат отбрасывается, а значение полосы фильтра удваивается. В случае подтверждения нового значения фильтр перестраивается (т. е. полоса фильтра уменьшается до исходной) на новое стабильное состояние измеряемой величины. Такой алгоритм позволяет защитить прибор от воздействия единичных импульсных и коммутационных помех, возникающих на производстве при работе силового оборудования.
Полоса фильтра задается в единицах измеряемой величины параметром in.FG для каждого Входа.
Малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. На практике при задании «полосы фильтра» следует руководствоваться максимальной скоростью изменения контролируемой величины и длительностью цикла опроса датчика.
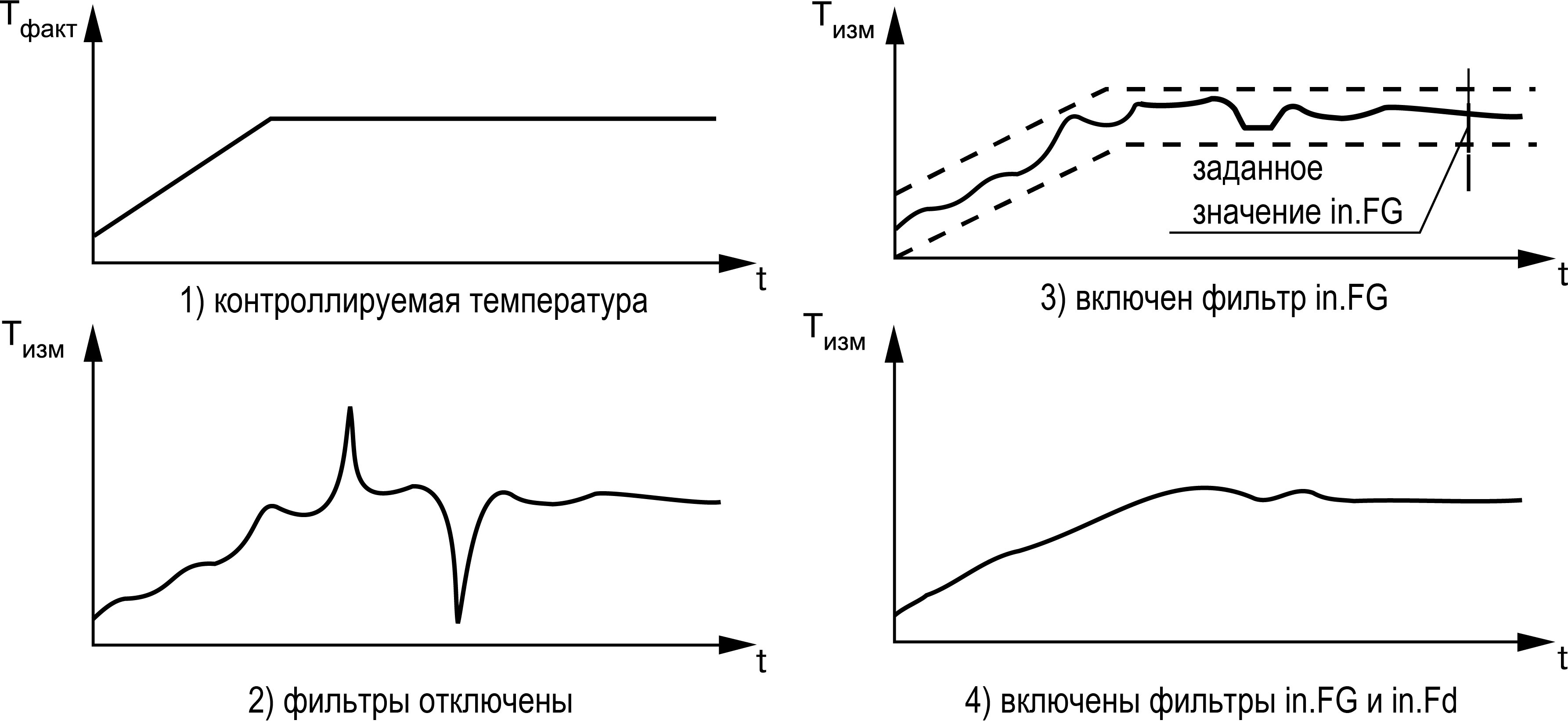
При необходимости данный фильтр отключается установкой нулевого значения параметра in.FG.
На втором этапе цифровые фильтры сглаживают результаты измерений при их колебаниях (демпфирование).
Основной характеристикой сглаживающего фильтра является Постоянная времени фильтра – интервал, в течение которого изменение выходного сигнала фильтра достигает 0,63 от изменения входного сигнала.
Постоянная времени фильтра задается в секундах параметром in.Fd для каждого Входа.
Увеличение постоянной времени фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины.
При необходимости данный фильтр отключается установкой in.Fd = 0.
Временные диаграммы работы цифровых фильтров представлены на рисунке
Коррекция измерительной характеристики датчиков
Для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами, измеренные и отфильтрованные прибором значения могут быть откорректированы. В приборе есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
Сдвиг характеристики осуществляется путем прибавления к измеренной величине значения, заданного параметром in.SH для данного Входа. Значение Сдвига характеристики датчика задается в единицах измерения физической величины и служит для устранения влияния начальной погрешности первичного преобразователя (например, значения R0 у термометров сопротивления).
Примеры сдвига измерительной характеристики представлены на рисунке ниже.
Наклон характеристики изменяется умножением измеренной величины на поправочный коэффициент β, значение которого задается для каждого Датчика параметром in.SL. Данный вид коррекции используется для компенсации погрешностей самих датчиков (например, при отклонении у ТС параметра α от стандартного значения) или погрешностей, связанных с разбросом сопротивлений шунтирующих резисторов (при работе с преобразователями, выходным сигналом которых является ток).
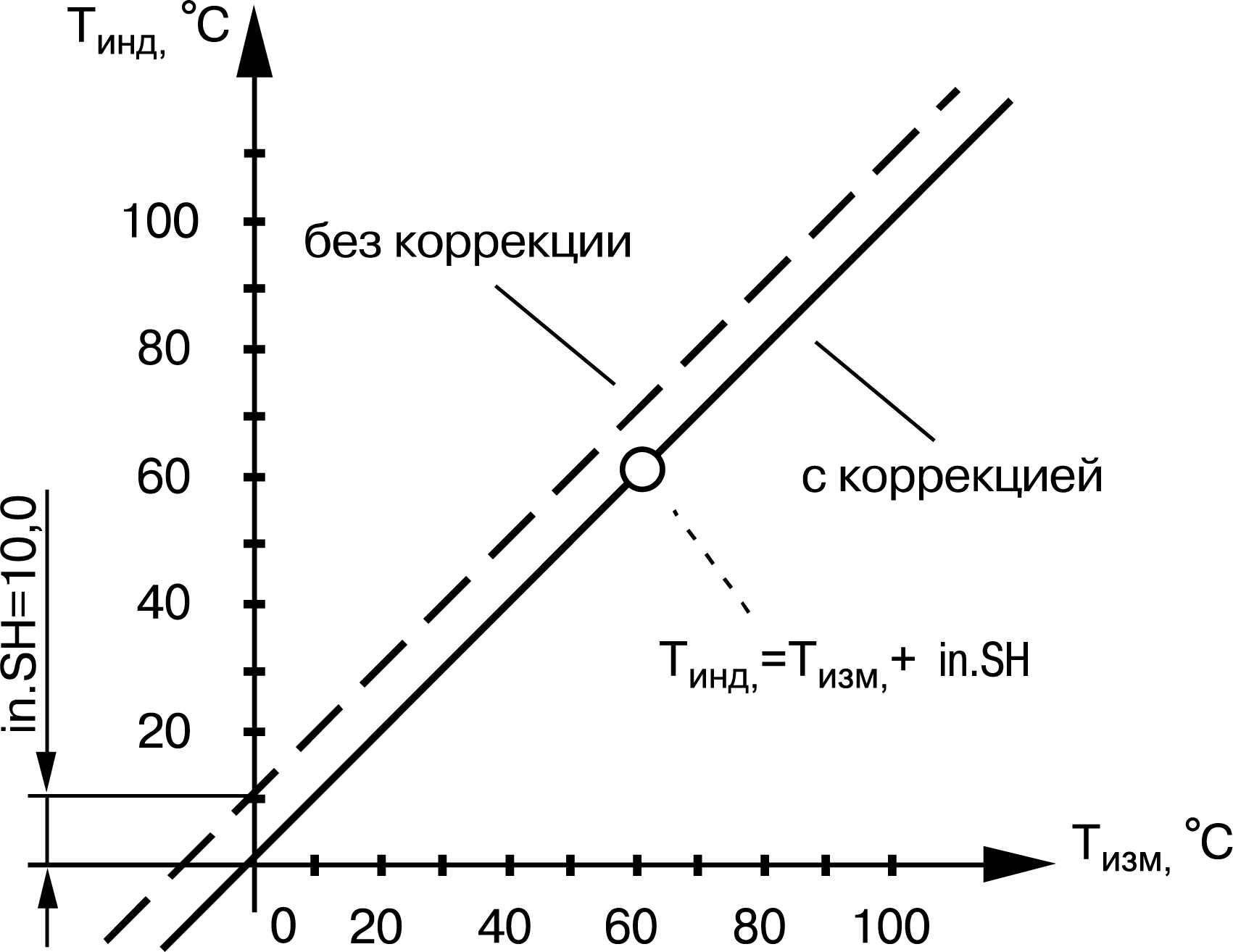
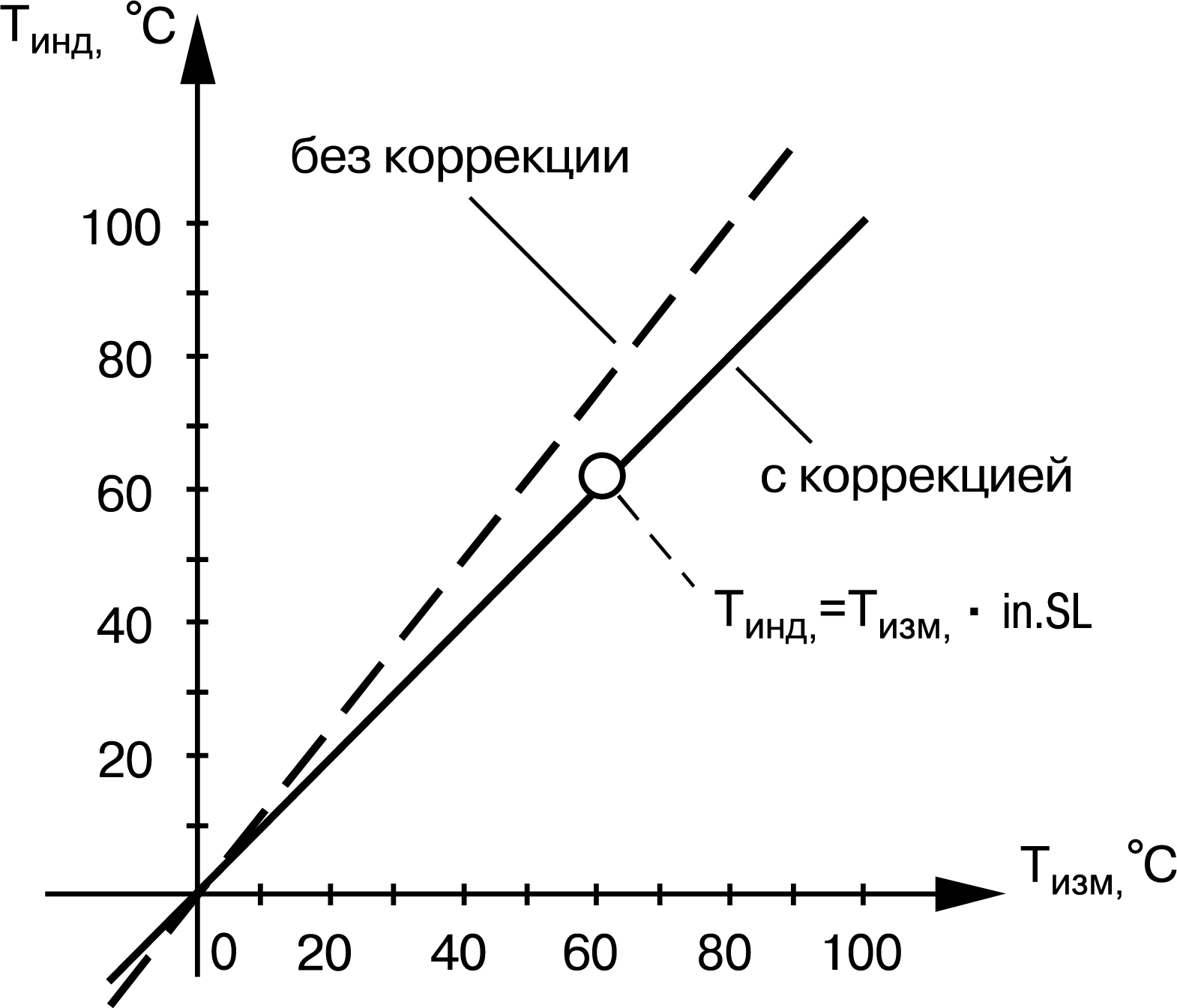
Значение поправочного коэффициента β задается в безразмерных единицах в диапазоне 0,900…1,100 и перед установкой определяется по формуле:

где β – значение поправочного коэффициента, устанавливаемого параметром in.SL;
Пфакт – значение величины без влияния погрешностей;
Пизм – измеренное прибором значение той же величины.
Пример изменения наклона измерительной характеристики представлен на рисунке выше.
Необходимость изменения заводской установки поправочного коэффициента рекомендуется определять при максимальных (или близких к ним) значениях входного параметра, где отклонение измерительной характеристики наиболее заметно.
Объект и канал регулирования
В настоящем Руководстве следует различать понятия:
объект физический – устройство или установка, осуществляющая технологический процесс, который характеризуется набором регулируемых параметров.
объект логический (Объект) – совокупность программных модулей, предназначенных для управления одним физическим объектом.
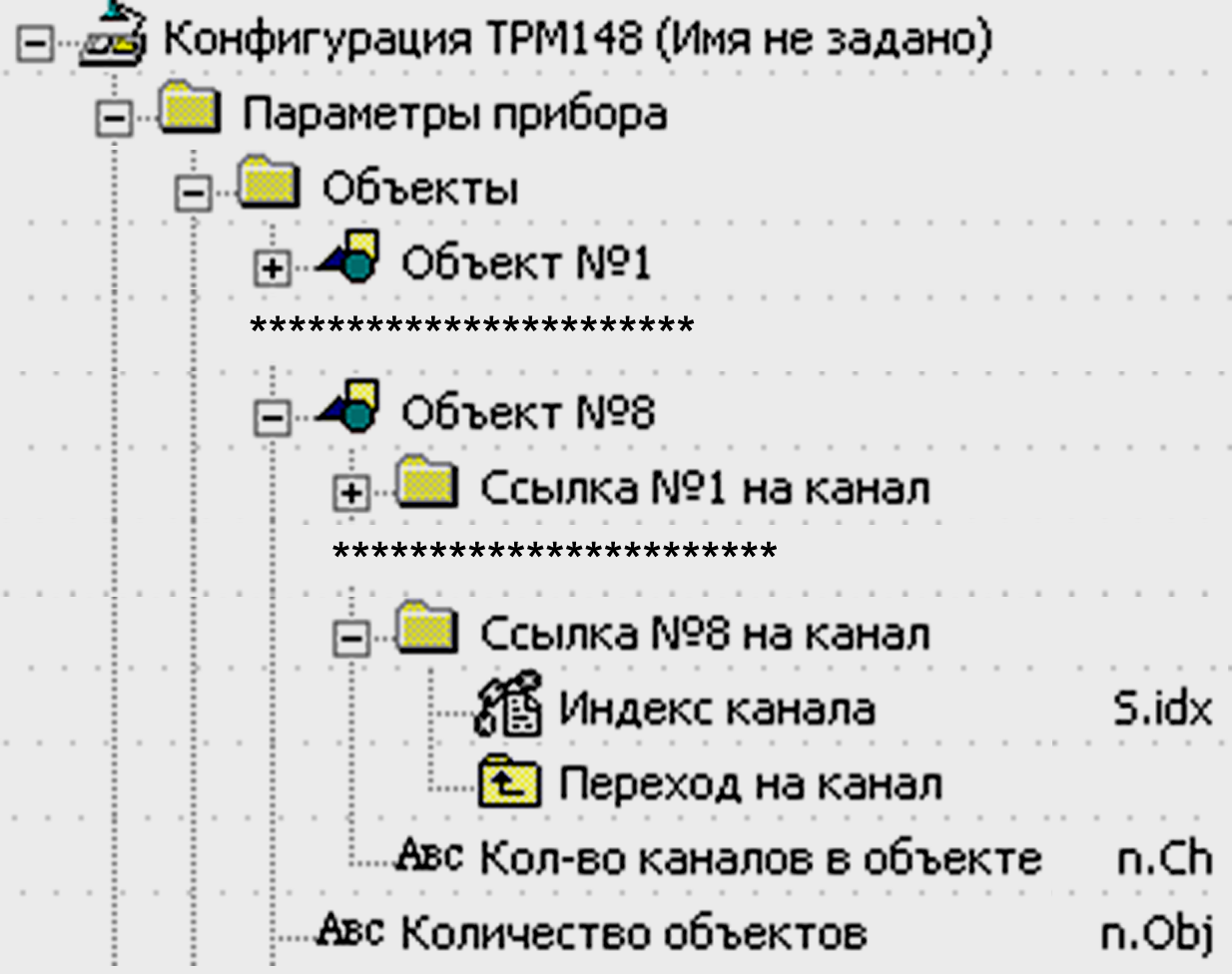
Физическим объектом может являться:
печь, в которой поддерживается температура;
теплица, в которой поддерживается влажность и температура;
емкость, в которой поддерживается уровень и давление
и т. п.
В ТРМ148 может быть до восьми независимых логических объектов для управления восемью физическими объектами.
Количество Объектов задается параметром n.obj.
В состав Объекта входит Канал – комплекс элементов прибора, предназначенный для регулирования и/или мониторинга одной физической величины (температуры, давления и др.), вычисляемой (контролируемой) по результатам измерения одним или несколькими датчиками.
Объект может включать один или несколько Каналов. Количество Каналов в Объекте равно количеству регулируемых и/или контролируемых физических величин Объекта.
Количество Каналов в Объекте задается параметром n.Ch.
Общее количество Каналов для всех Объектов не должно превышать 8.
Структурная схема одного канала приведена на рисунке ниже.
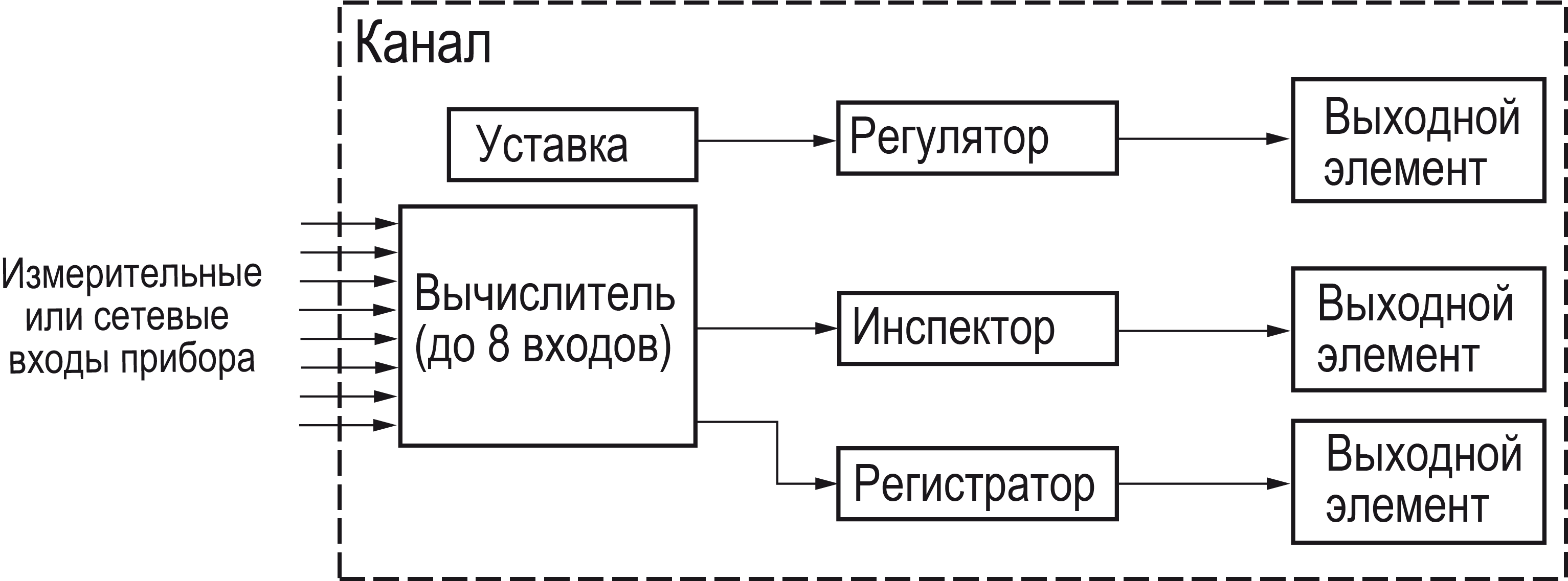
В состав Канал входят следующие основные единицы:
Вычислитель – программный модуль, который вычисляет выходную величину для регулятора, инспектора и регистратора;
Регулятор – модуль, который преобразует величину с Вычислителя по двухпозиционному или ПИД-закону
Инспектор – модуль, контролирующий возможный выход вычисленного значения за допустимые границы и выдающий сообщение об аварии;
Регистратор – модуль, который подает вычисленное значение на выходной элемент для дальнейшего преобразования в аналоговый сигнал.
В приборе предусмотрен набор параметров, регламентирующих работу Канала:
Вычислитель в Канале можно отключить параметром CAL.t
;Регулятор в Канале включается/отключается параметром rEGL
;Инспектор в Канале включается/отключается параметром insP
;Регистратор в Канале можно отключить параметром OP.i.
.
Фрагменты экранного интерфейса программы «Конфигуратор ТРМ148», на которых показан путь к параметрам CAL.t, rEGL, insP и OP.i, представлены далее в соответствующих разделах.
Тип датчика
Для каждого Входа следует задать тип подключенного к нему Датчика в параметре in-t, выбрав его из предложенного списка (в соответствии с таблицей).
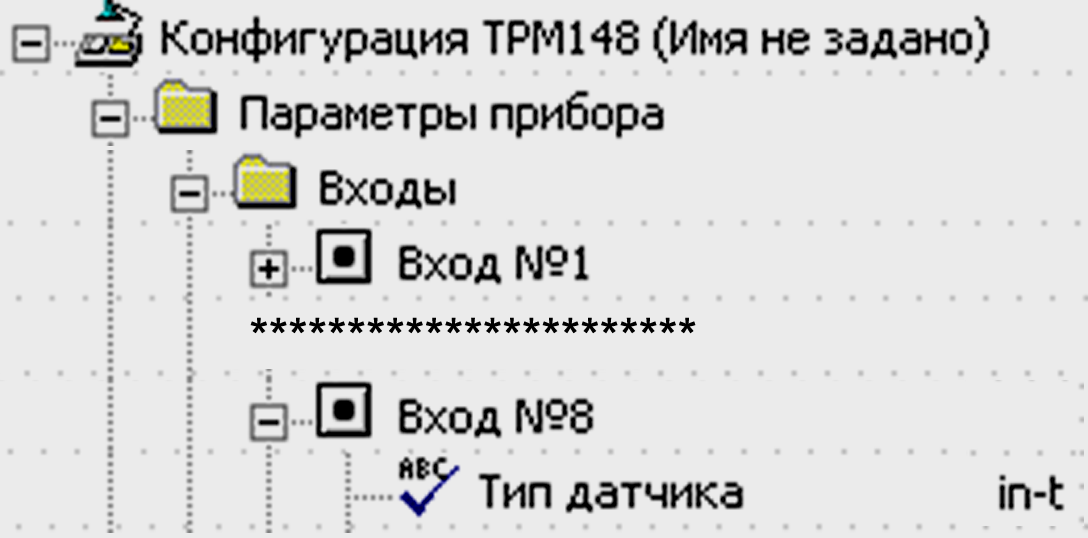
Если вход не используется, то для него следует установить значение «Датчик не подключен».
Периодичность опроса датчиков
В приборе существует возможность установить период опроса Датчика на каждом Входе. Изменение мощности, подаваемой на ИМ, будет производиться с частотой, равной частоте опроса Входов.
Период опроса задается параметром itrL в секундах с точностью до 0,1 с.
Автоматическая коррекция показаний по температуре свободных концов ТП
Данная коррекция обеспечивает правильные показания прибора при изменении температуры окружающей его среды. Датчик температуры свободных концов термопар расположен внутри прибора у клеммных контактов.
Коррекция включается/выключается параметром CJ-.C.
Этот вид коррекции следует отключать, например, при проведении поверочных испытаний прибора. При отключенной коррекции температура свободных концов термопар принимается равной 0 °С и ее возможные изменения в расчет не принимаются.
Масштабирование шкалы измерения для активных датчиков
При работе с активными датчиками, выходным сигналом которых является напряжение или ток, текущие значения контролируемых величин вычисляются по масштабирующим коэффициентам. После масштабирования контролируемые физические величины отображаются непосредственно в единицах их измерения (атмосферах, килопаскалях, метрах и т. д.).
Для каждого датчика следует индивидуально установить диапазон измерения:
нижняя граница диапазона измерения задается параметром Ain.L и соответствует минимальному уровню выходного сигнала датчика;
верхняя граница диапазона измерения задается параметром Ain.H и соответствует максимальному уровню выходного сигнала датчика.
Пример
При использовании датчика с выходным током 4…20 мА, контролирующего давление в диапазоне 0…25 атм, следует задать Ain.L = 00,00 и AinH = 25,00. После этого обработка и отображение показаний будет производиться в атмосферах.
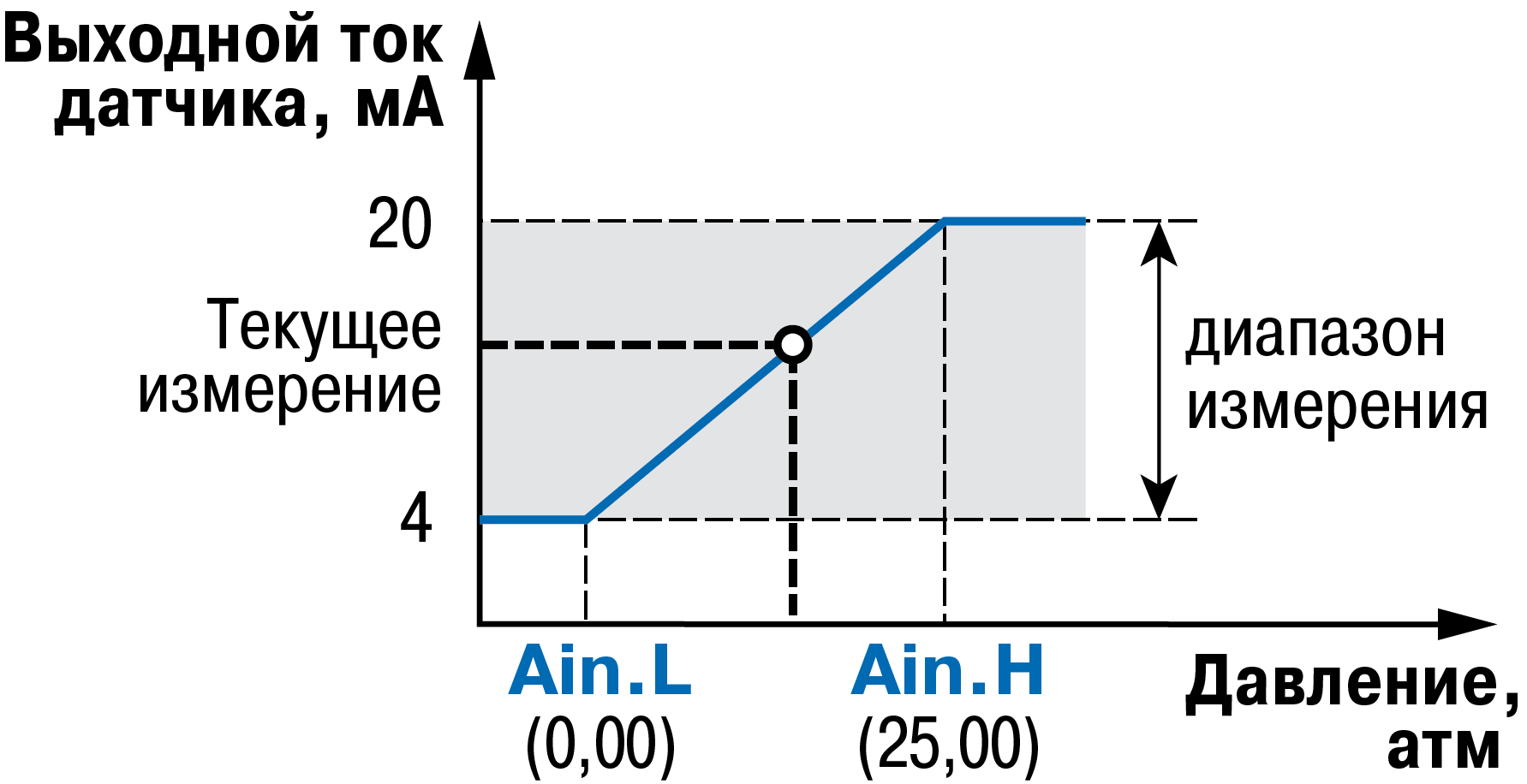
Далее сигналы обрабатывается в заданных единицах измерения по линейному закону (прямо пропорциональному при Ain.H > Ain.L или обратно пропорциональному при Ain.H < Ain.L).
Вычислитель в составе Канала
Вычислитель – программный модуль, который вычисляет выходную величину по одному или нескольким входным значениям. К Вычислителю подключается до 8 источников данных. Источниками данных являются собственные измерительные входы прибора.
Тип источника данных Вычислителя задается в параметре t.in, а номер источника данных – в параметре in.
Вычислитель включен в Канал регулирования и жестко связан с тремя его блоками: регулятором, инспектором и регистратором. В эти три блока поступают данные с выхода Вычислителя. Чтобы использовать Вычислитель, канал регулирования должен быть подключен к Объекту.
Пример схемы подключения измерительных и сетевых входов прибора ко входам Вычислителя представлен на рисунке.
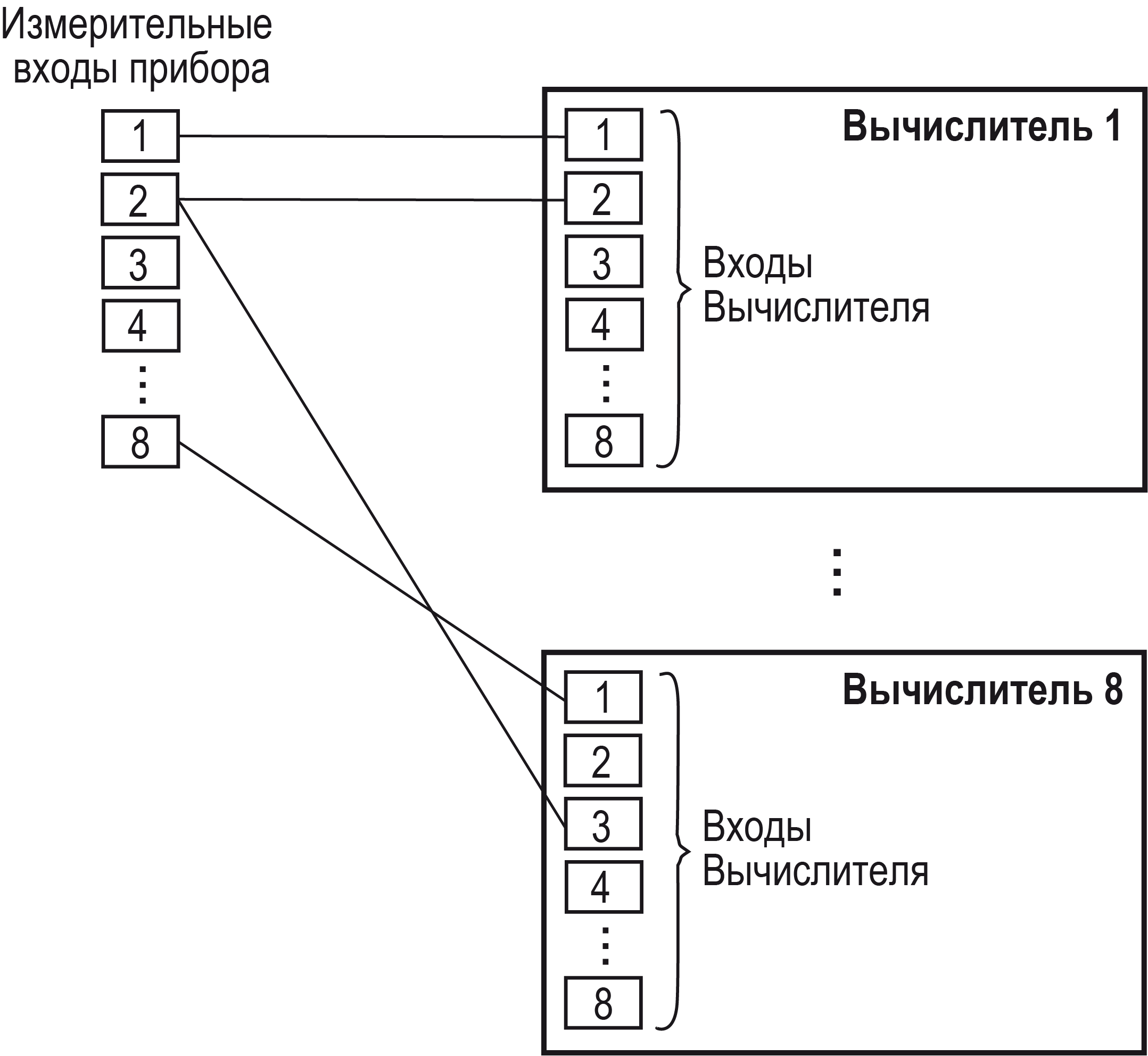
Для связи измерительных и сетевых входов с Вычислителями требуются следующие данные:
тип вычислителя (формула для вычисления) (параметр CAL.t);
количество используемых Входов (параметр n.in.c);
количество знаков после десятичной точки (параметр dP);
весовые коэффициенты измерительных входов при расчете взвешенной суммы или частного (параметр SCA).
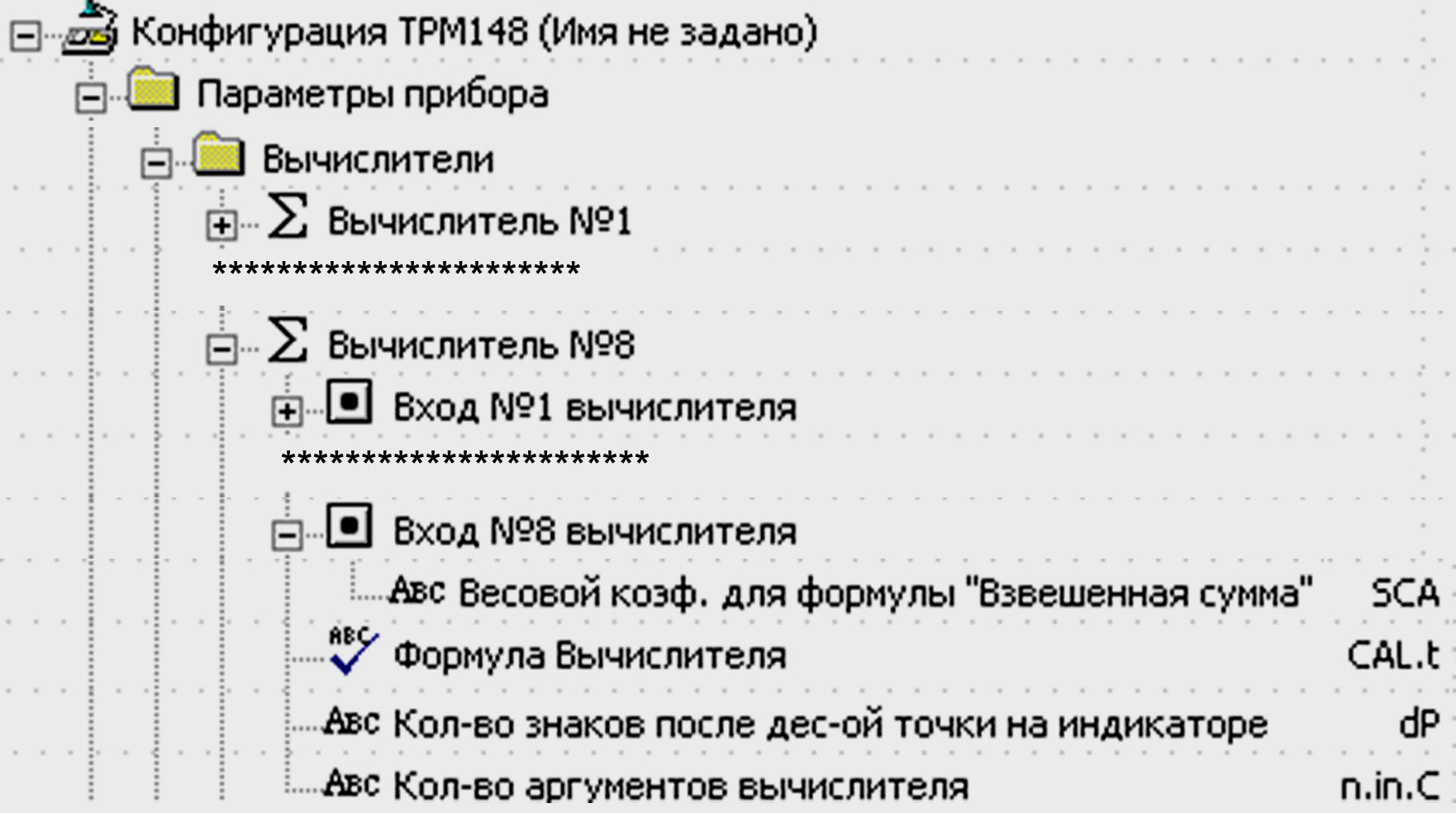
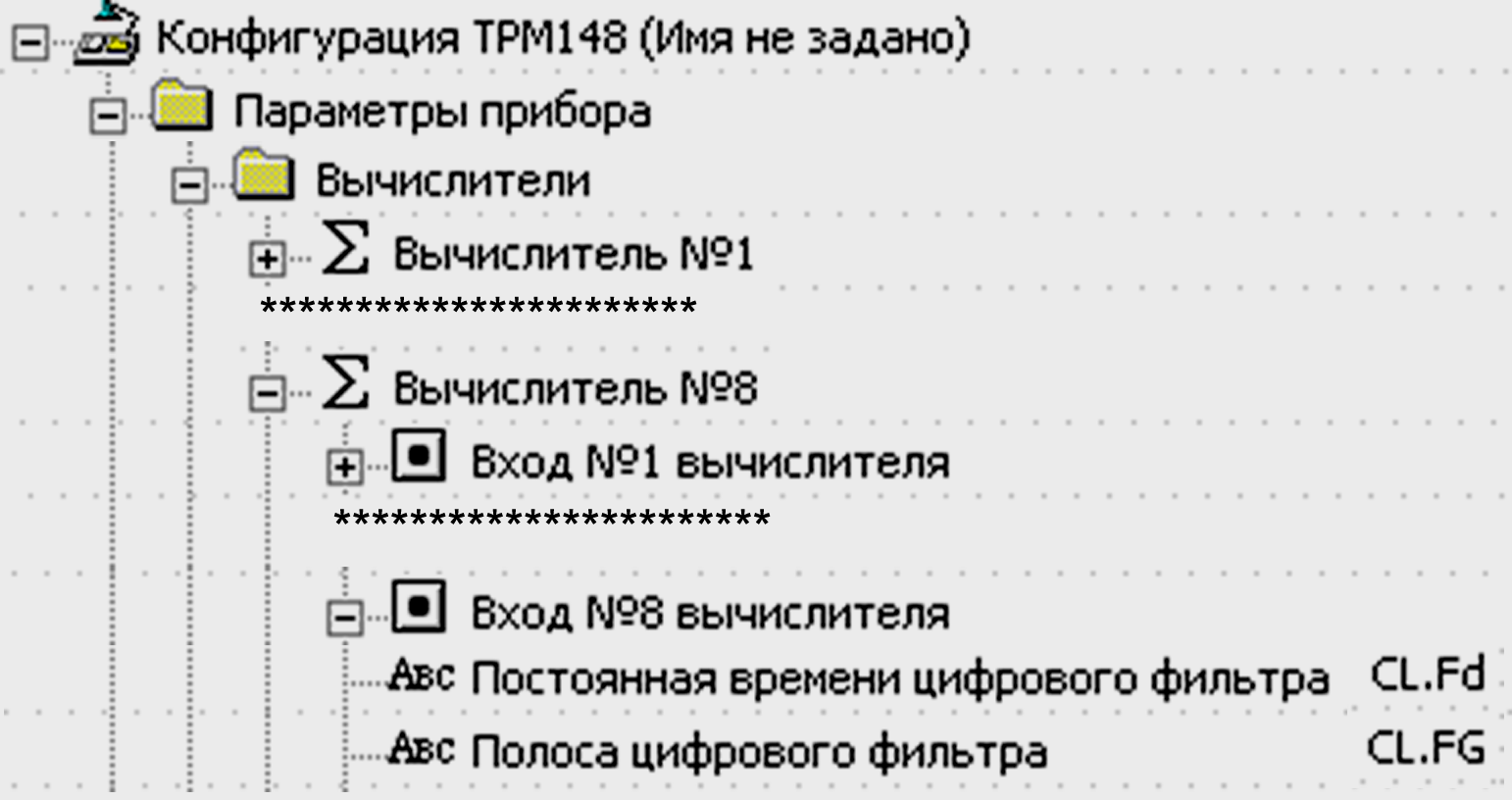
Рекомендуется отключить фильтры вычислителей, установив в их параметрах нулевые значения.
Тип Вычислителя
Вычислитель может параллельно производить только один выбранный тип операций с входными величинами. Функциональное назначение (формулы для вычисления), по которому сконфигурирован вычислитель, и число используемых входных величин представлены в таблице.
Также в таблице представлены символы, которые отображаются на ЦИ при настройке режима работы Вычислителя с помощью кнопок прибора.
Варианты применения Вычислителя
Символы на ЦИ | Формула Вычислителя (параметр CAL.t) | Разрешенное число входов Вычислителя (параметр n.in.C) |
|---|---|---|
| REPT | Повторитель | 1 |
| SU | Взвешенная сумма | 1...8 |
| RAT | Частное | 2 |
| SQR | Квадратный корень | 1 |
| TOP | Максимум | 1...8 |
| BOTT | Минимум | 1...8 |
| ARIF | Среднее арифметическое | 1...8 |
| RH | Вычислитель влажности | 2, 3 |
| AURG | Медиана | 3, 5, 7 |
| OFF | Вычислитель отключен | параметр не задается |
Настройки вычислителя позволяют выполнять следующие функции:
Повторитель передает измеренное значение со входа Вычислителя на выход, не производя математических действий.
Следует установить значение Повторитель, если регулируемая физическая величина измеряется на Входе и не требует никаких дополнительных вычислений. Пример – мониторинг температуры, которая измеряется термопарой.
Взвешенная сумма вычисляется по формуле:

где К1…К8 – весовые коэффициенты для входов 1…8. Весовые коэффициенты К задаются параметрами SCA. Коэффициенты K могут быть целыми, дробными, положительными, отрицательными.
С помощью Взвешенной суммы вычисляется разность двух измеренных величин. Для этого нужно задать одному входу весовой коэффициент «– 1», а другому «+1».
Частное – результат деления первого входного значения на второе, вычисляемый с учетом весовых коэффициентов входных значений К, задаваемых параметрами SCA, по формуле:

Квадратный корень извлекается из значения, пришедшего на первый вход Вычислителя.
ВниманиеИзвлечение квадратного корня из отрицательных чисел не допускается!·Функции Минимум и Максимум передают наименьшее и наибольшее по величине из значений, пришедших на входы Вычислителя (с учетом знака).
Расчет влажности производится психрометрическим методом по температурам сухого и влажного термометров. На первый вход Вычислителя подается температура сухого термометра, на второй вход – температура влажного термометра.
Для более точного вычисления влажности используется значение атмосферного давления. Величина давления подается на третий вход Вычислителя и измеряется в гектопаскалях (гекто = 102). В случае отсутствия измеренного атмосферного давления оно принимается нормальным, равным 1013.25 гектоПа.
- Функция Медиана работает с нечетным количеством
входов Вычислителя. Вычислитель выбирает максимальное и минимальное
входные значения и отсекает их. С оставшимися входными величинами
он повторяет ту же процедуру – и так до тех пор, пока не останется
одно число, которое и будет значением функции Медиана.
Например, если Вычислитель получает 5 входных значений: «10», «88», «56», «40», «37» – то функция Медиана передает значение «40».
Вычислитель имеет два цифровых фильтра: НЧ-фильтр и пиковый. Они могут быть использованы для фильтрации величин, пришедших по сети RS-485.
Для фильтрации величин, измеренных собственными входами прибора, используются цифровые фильтры, входящие в модуль Входов прибора.
Количество знаков после десятичной точки
Вычисленная физическая величина отображается на четырехразрядном ЦИ1 с различной точностью. В параметре dP следует задать количество знаков, отображаемых после десятичной точки.
По умолчанию установлено значение dP = 1.
Если число слишком велико и не помещается на ЦИ, то прибор «отрезает» последние цифры, например: при dP = 2 число «485,84» отобразится как «485,8».
Просмотр остальных цифр возможен с помощью кнопки .
Регулятор
Регулятор – это программный модуль, отвечающий за поддержание измеренной или вычисленной величины на заданном уровне, называемом Уставкой.
Регулятор канала включается/выключается с помощью параметра rEGL.
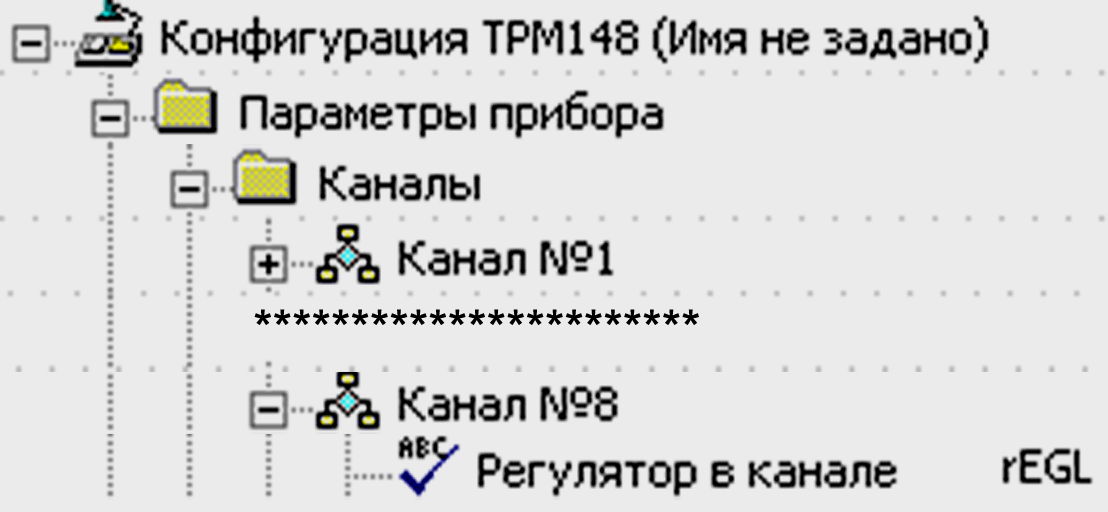
На вход Регулятора подается значение с Вычислителя того же Канала (контролируемая величина) и Уставка. На выходе Регулятор вырабатывает сигнал, направленный на уменьшение отклонения контролируемой величины от Уставки. Допускается изменение Уставки в процессе выполнения программы, для этого существуют Графики коррекции Уставки. Выходной сигнал Регулятора поступает на Выходное устройство сложной структуры, с помощью которого осуществляется управление одним или несколькими ИМ.
Для каждого Регулятора задаются следующие параметры:
режим работы (ПИД- или двухпозиционный регулятор);
зона нечувствительности;
для ПИД-регулятора – параметры ПИД-регулирования и автонастройки;
для двухпозиционного регулятора – гистерезис и задержки.
Пример
Значение выходного сигнала Регулятора равно 0,62. Тогда ИМ будет загружен на 62 %: если ИМ – задвижка, она будет открыта на 62 %; если ИМ – ТЭН, на него будет подан ШИМ-сигнал с соответствующей скважностью.
Отрицательное значение выходного сигнала Регулятора (от –1 до 0) означает, что следует включать ИМ, уменьшающие значение регулируемой величины – «холодильники».
Положительное значение выходного сигнала Регулятора (от 0 до +1) означает, что следует включать ИМ, увеличивающие значение регулируемой величины – «нагреватели».
Режимы работы Регулятора
Регулятор работает в двух режимах: ПИД-регулятор и Двухпозиционный регулятор (ON/OFF).
Режим работы Регулятора задается в параметре rEG.t.
ПИД-регулятор
ПИД-регулятор вырабатывает аналоговый сигнал, который задает выходную мощность ИМ и уменьшает отклонение текущего значения регулируемой величины от Уставки.
При работе с ВЭ типа ЦАП выходная мощность преобразуется в пропорциональный ей ток или напряжение.
При работе с ВЭ дискретного типа выходная мощность преобразуется в ШИМ-сигнал, для которого следует задать период следования импульсов (параметр tHP).
Принцип формирования ШИМ-сигнала для управления системы «нагреватель-холодильник» представлен на рисунке на примере функционирования пропорционального регулятора.
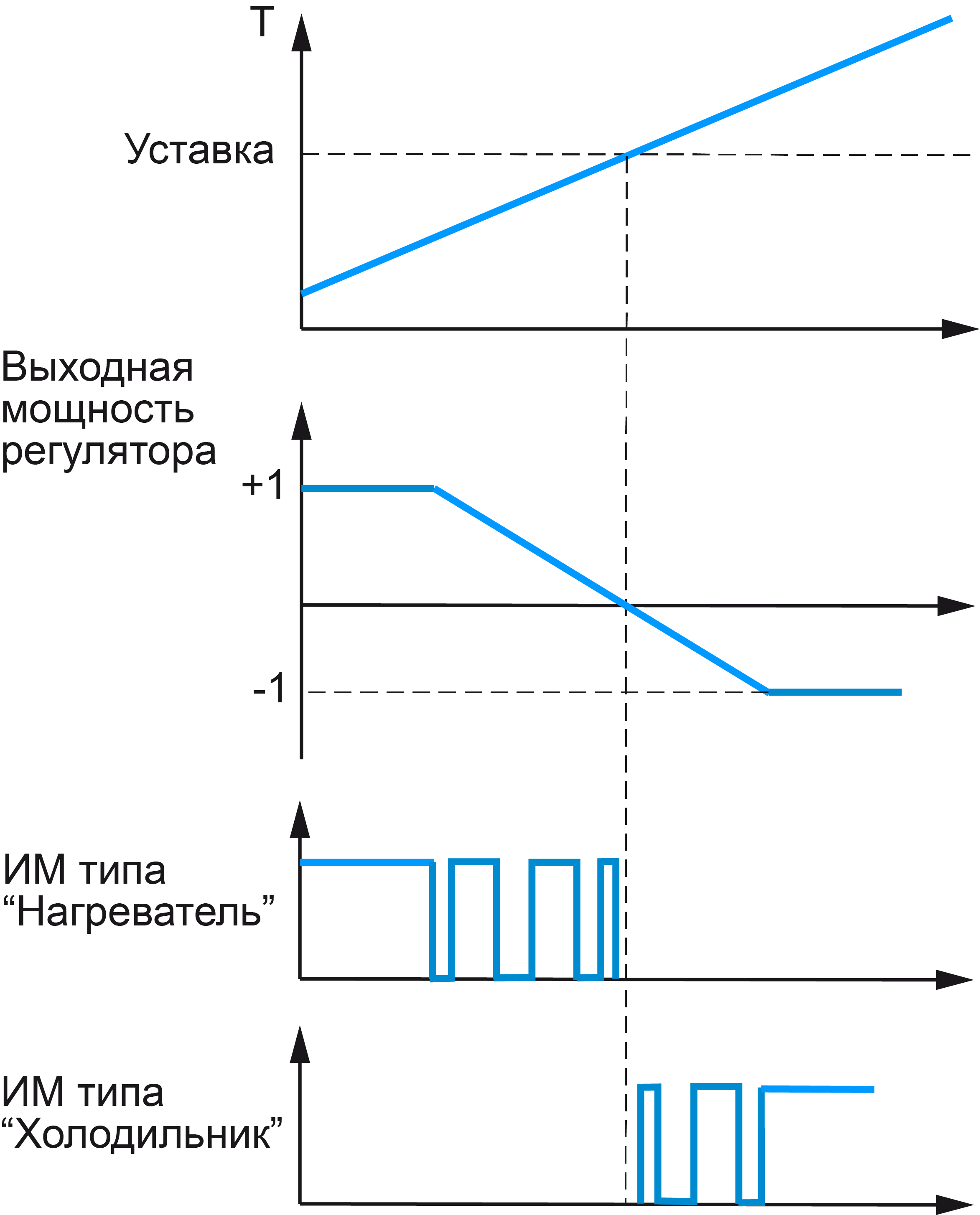
ПИД-регулирование является наиболее точным методом поддержания контролируемой величины. Однако для эффективной работы ПИД-регулятора следует подобрать для конкретного объекта регулирования ряд коэффициентов.
Настройка ПИД-регулятора (подбор коэффициентов) довольно сложна, но она может быть выполнена в автоматическом режиме.
Номинальная выходная мощность. Ограничение накопления интегральной составляющей
Поведение объекта при классическом ПИД-регулировании демонстрирует черная кривая на рисунке.
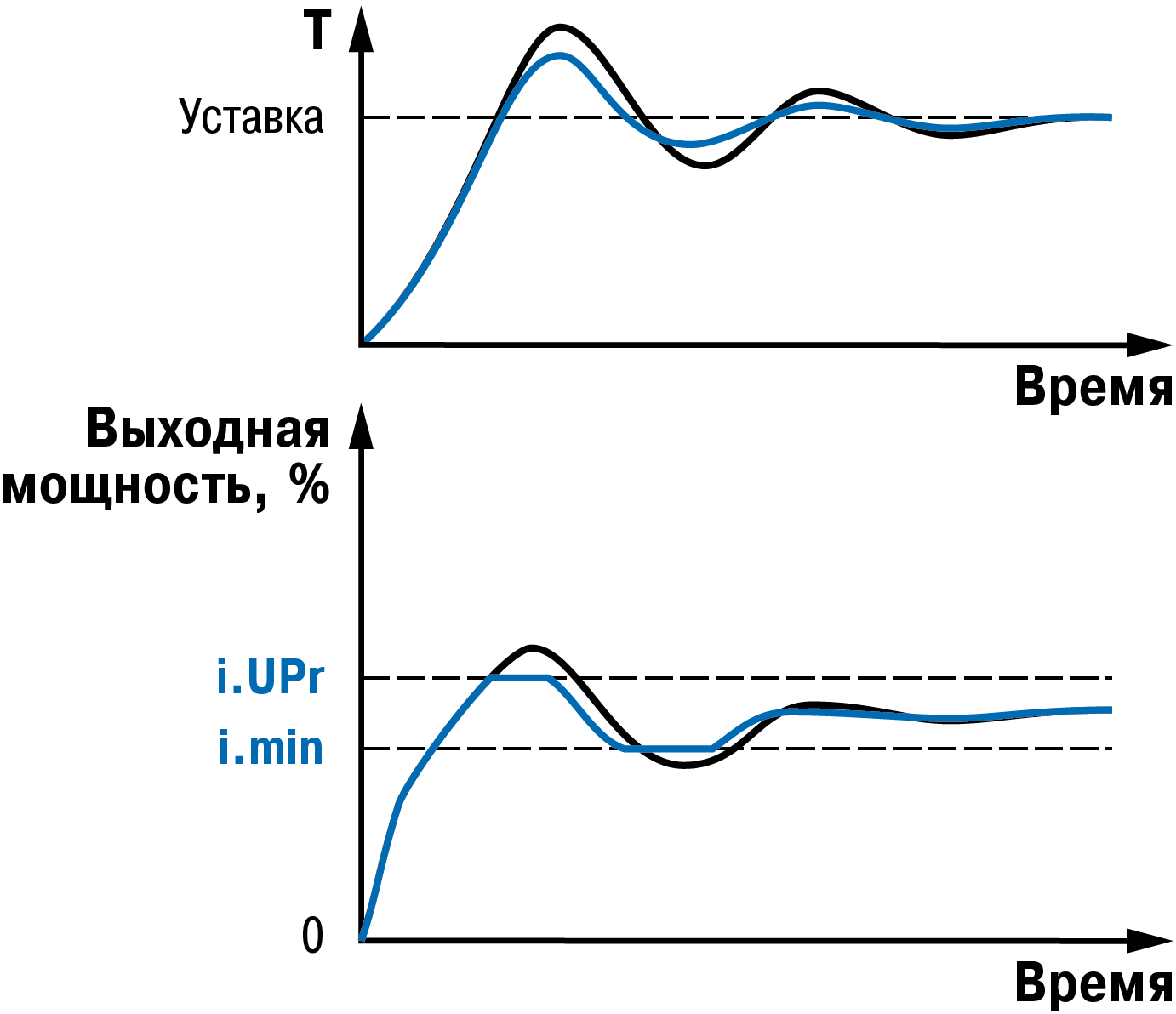
При длительном выходе на уставку ПИД-регулятор производит «перерегулирование» объекта. «Перерегулирование» связано с тем, что в процессе выхода на уставку накопилось очень большое значение интегральной составляющей в выходном сигнале регулятора (мощности).
После «перерегулирования» начинается уменьшение значения интегральной составляющей, что, в свою очередь, приводит к провалу ниже уставки – «недорегулированию». Только после одного-двух таких колебаний ПИД-регулятор выходит на требуемое значение мощности.
Во избежание «перерегулирования» и «недорегулирования» задать диапазон значений для накопленной интегральной составляющей:
ограничение максимума интеграла – параметр i.Upr – задает максимальный процент выходной мощности, полученной в результате накопления интегральной составляющей;
ограничение минимума интеграла – параметр i.min – задает минимальный процент выходной мощности, полученной в результате накопления интегральной составляющей.
Пример
Имеется печь, о которой из опыта известно, что для поддержания определенной уставки требуется мощность от 50 % до 70 %. Разброс мощности в 20 % вызван изменениями внешних условий, например температуры наружного воздуха. «Перерегулирование» и «недорегулирование» в системе уменьшится после задания ограничений для интегральной составляющей. Для данного случая требуется задать i.min = 50 и i.UPr = 70 (см. рисунок, синяя кривая).Для уменьшения колебаний при переходных процессах можно также задать номинальную мощность. Номинальная мощность – это средняя мощность, которую надо подать в объект регулирования для достижения требуемой уставки. В рассматриваемом примере номинальную мощность P.nom нужно задать равной 60 %. Тогда при работе к значению выходной мощности, рассчитанной ПИД-регулятором, будет прибавляться номинальная мощность. При задании номинальной мощности параметры ограничения интеграла следует задать от значения P.nom. Соответственно, в примере для достижения значения интегральной составляющей от 50 до 70 % и при P.nom = 60 % следует задать i.min = –10 %, а i.UPr = +10 %.
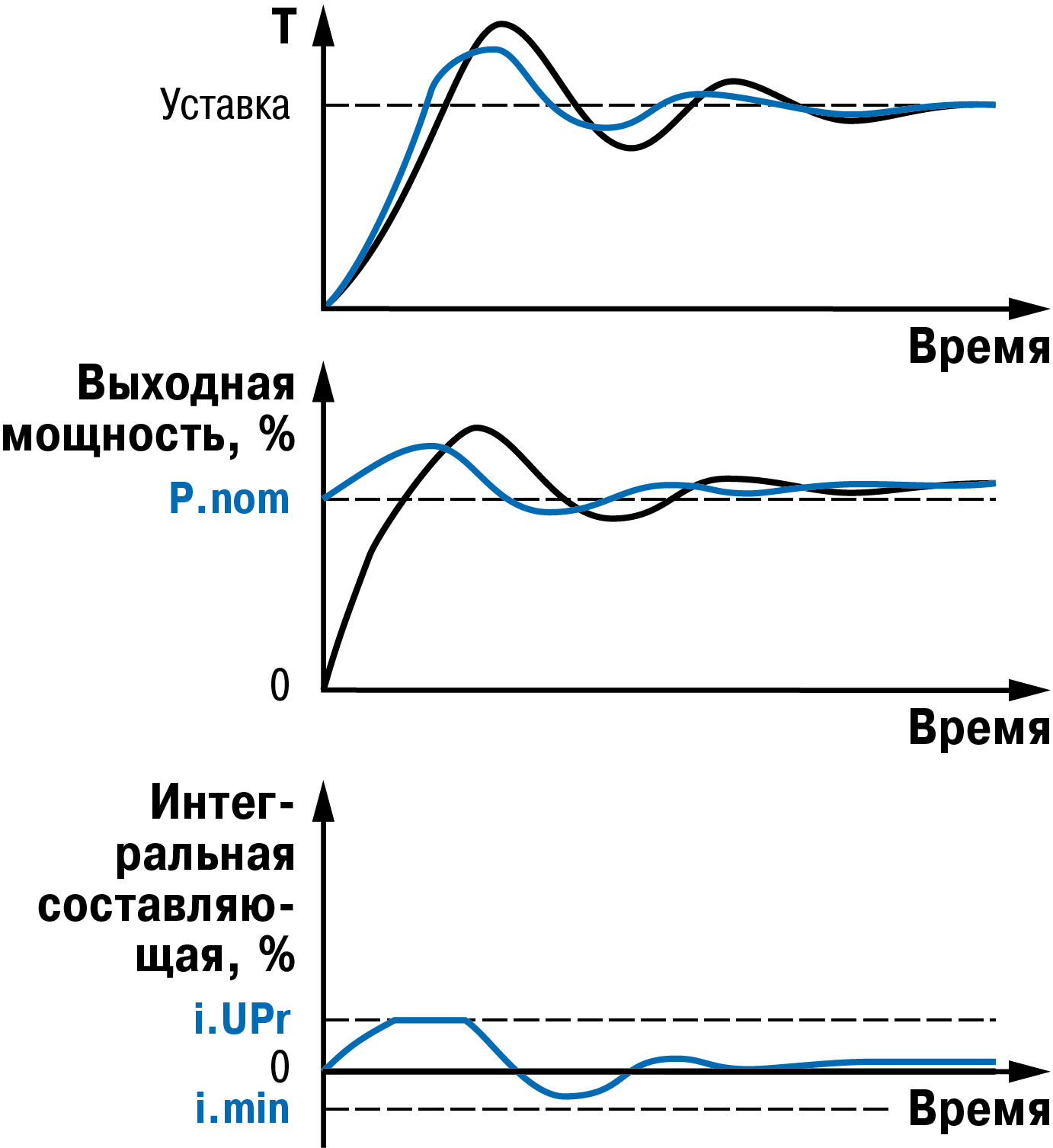
Работа системы с заданной номинальной мощностью и ограничениями интегральной составляющей показана на рисунке. Переходный процесс протекает быстрее, т. к. значение выходной мощности сразу начинает расти от P.nom, а не от нулевого значения.
Также задание Р.nom следует при использовании ПД-регулятора.
Значение параметра db (зона нечувствительности) влияет на величину полосы пропорциональности (Pb), смещая её в сторону уменьшения (для нагревателя) на db/2.
Коэффициент мощности холодильника P.CLD задает соотношение мощности холодильника и нагревателя при регулировании системы "нагреватель-холодильник". Параметр показывает мощность холодильника, если принять мощность нагревателя за 1.
Параметр P.CLD автоматически определяется во время настройки ПИД, в т. ч. и для системы с чистым «нагревателем», где этот параметр не используется.
Автоматическая настройка ПИД-регуляторов
Автоматическая настройка ПИД-регулятора нужна для того, чтобы за короткое время определить параметры Регулятора, которые будут использоваться в последующем процессе регулирования.
Во время автонастройки производится регулирующее воздействие на объект в большом диапазоне и с большой скоростью изменения. Это может привести к выходу объекта регулирования из строя, например, вследствие гидравлических ударов или недопустимых температур.
Общие правила проведения автонастройки ПИД-регулятора
Процесс автонастройки проходит непосредственно на объекте, поэтому следует предварительно задать конфигурацию прибора, а также подключить к нему требуемые датчики и ИМ.
Условия, в которых проводится автонастройка, должны быть максимально приближены к реальным условиям эксплуатации объекта.
Автонастройка ведется для каждого Канала в отдельности.
Если технические условия эксплуатации объекта не допускают изменения регулирующего воздействия в широком диапазоне и со значительными скоростями изменения, то следует задать приблизительную настройку Регулятора в ручном режиме
Для исполнительных механизмов, которые различаются по характеру физического воздействия на регулируемый объект, методы проведения Автонастройки также будут различаться. ИМ прибора подразделяются на следующие типы:
с ненулевым временем перевода рабочей части ИМ из одного крайнего положения в другое;
с нулевым временем перевода рабочей части ИМ из одного крайнего положения в другое.
Автоматическая настройка ИМ с ненулевым временем перевода рабочей части ИМ из одного крайнего положения в другое (типа задвижки)
К исполнительным механизмам с ненулевым временем хода относятся различные задвижки, поворотные клапана, шторки, жалюзи и т. д. Отличительной особенностью таких им является то, что перевод рабочей части из одного положения в другое осуществляется за время от нескольких секунд до нескольких десятков минут. Это время хода требуется учитывать при вычислении параметров ПИД-регулятора при автонастройке.
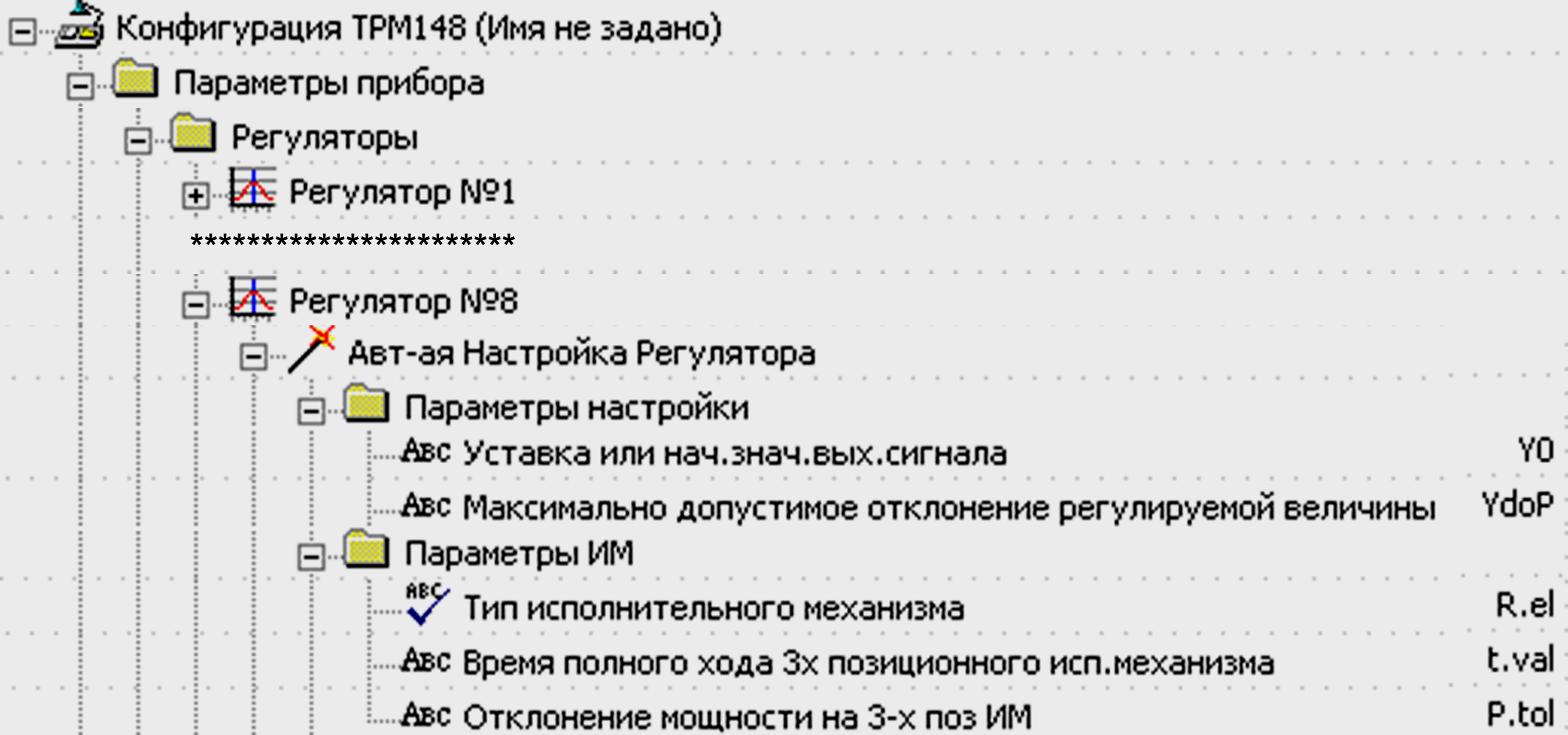
ИМ с ненулевым временем хода могут быть трехпозиционного типа (т. е. управляемые сигналами больше/меньше/стоп, требующие для управления двух реле) или ИМ с аналоговым управлением (управляются унифицированным сигналом от 4 до 20 мА или унифицированным сигналом от 0 до 10 В).
Для проведения автонастройки при управлении задвижкой следует:
Полностью сконфигурировать прибор в соответствии с подключаемыми к нему датчиками и исполнительными механизмами.
Задать из Конфигуратора (или с лицевой панели прибора) параметр автонастройки Y0 для выбранного канала регулирования -- начальное значение мощности, при которой будет проходить автонастройка в %.
Установить в параметре YdoP "максимальное допустимое отклонение регулируемой величины". В процессе автонастройки регулируемая величина будет колебаться с амплитудой YdoP. Слишком большое значение YdoP приведет к недопустимому воздействию на управляемый объект. Напротив, при слишком малом значении YdoP воздействие на объект будет недостаточным, и его параметры будут определены неточно. При регулировании температуры оптимальное значение YdoP находится в диапазоне 5...30 с.
Задать параметр R.el – «тип исполнительного механизма по характеру физического воздействия на объект регулирования» и параметр t.val – «время перевода рабочего органа ИМ из одного крайнего положения в другое» – в секундах.
Для корректной работы задвижки с аналоговым управлением значение параметра r.el должно быть «ИМ типа задвижка», а значение параметра se.p – двух позиционный ИМ.ВниманиеДля трехпозиционного ИМ следует задать время полного хода из одного крайнего положения в другое в двух параметрах: t.val и tР.Н. Если значения параметров t.val и tp.h не будут совпадать, это может привести к ошибочному расчету коэффициентов регулятора при АНР. При использовании конфигуратора на среднем уровне доступа эти параметры автоматически синхронизируются, и значение tР.Н будет скопировано из t.val.Для ИМ с аналоговым управлением задается только параметр t.val.
Задать параметр «допустимое отклонение мощности» Рtol, в папке «параметры ИМ», который отвечает за отклонение мощности в процентах от установившегося значения. Рекомендуемый интервал 5…10 %. Меньшее значение следует устанавливать при отсутствии в процессе настройки воздействий на объект или при наличии ограничений на условия эксплуатации объекта.
Для проведения автонастройки прибора следует:
Для входа в режим автонастройки одновременно нажать кнопки
+ (порядок
нажатия важен). На ЦИ1 отображается слово «anr».Для подтверждения входа в режим нажать кнопку
.Выбрать Объект, в котором находится настраиваемый регулятор, кнопками
и . Для подтверждения выбора объекта
нажать кнопку .С помощью кнопок
и , регулировать работу
ИМ (процесс отображается на ЦИ2, регулируемая величина - на ЦИ1).
Стабилизировать значение величины в требуемом диапазоне. По окончании
стабилизации нажать кнопку .Проконтролировать изменение величины на ЦИ1 и выходного сигнала на ЦИ2.
Прибор должен работать в режиме двухпозиционного регулирования с переключением выходного сигнала регулятора между максимальным Рmax = Рstab + Рtol и минимальным Рmin = Рstab — Рtol уровнями, где Рstab – значение выходного сигнала регулятора, при котором был запущен процесс автонастройки (см. п 3).
Когда настройка выполнена, на ЦИ2 мигает сообщение donE.
Нажать кнопку
.Прибор возвращается из режима автонастройки в состояние СТОП.
Автоматическая настройка ИМ с нулевым временем перевода рабочей части ИМ из одного крайнего положения в другое (типа ТЭН)
Исполнительный механизм с нулевым временем хода – это ИМ, время перевода которого из выключенного состояния во включенное пренебрежимо мало. К таким ИМ относятся различные ТЭН, электродвигатели, отсечные клапаны, форсунки и т. д.
Для проведения АНР при управлении ИМ типа ТЭН следует:
Полностью сконфигурировать прибор в соответствии с подключаемыми к нему датчиками и исполнительными механизмами.
Задать из Конфигуратора (или с лицевой панели прибора) параметры Y0 (значение Уставки для автонастройки) и YdoP (допустимые колебания регулируемой величины) для выбранного Канала регулирования.
Задать тип исполнительного механизма: R.el – ИМ типа «ТЭН».
Последовательность действий с прибором:
Для входа в режим Автонастройки одновременно нажать кнопки
+ (порядок
нажатия важен). На ЦИ1 отображается слово ANR.Для подтверждения входа в режим нажать кнопку
.Выбрать Объект, в котором находится настраиваемый Регулятор, кнопками
и . Для подтверждения выбора нажать
кнопку .Проконтролировать изменение величины на ЦИ1 и выходного сигнала на ЦИ2.
Прибор должен работать в режиме двухпозиционного регулирования с переключением выходного сигнала регулятора между максимальным Pmax = 100 % и минимальным Pmin = 0 % уровнями.
Когда настройка выполнена, на ЦИ2 мигает сообщение DONE на ЦИ2.
Нажать кнопку
. Прибор
возвращается из режима Автонастройки в состояние СТОП.
Индикация параметров автонастройки
Текущие значения регулируемой величины и выходного сигнала Регулятора
по умолчанию отображаются на ЦИ1 и ЦИ2 соответственно. Нажатием кнопки можно вывести на эти ЦИ текущие
значения других параметров (см. рисунок)
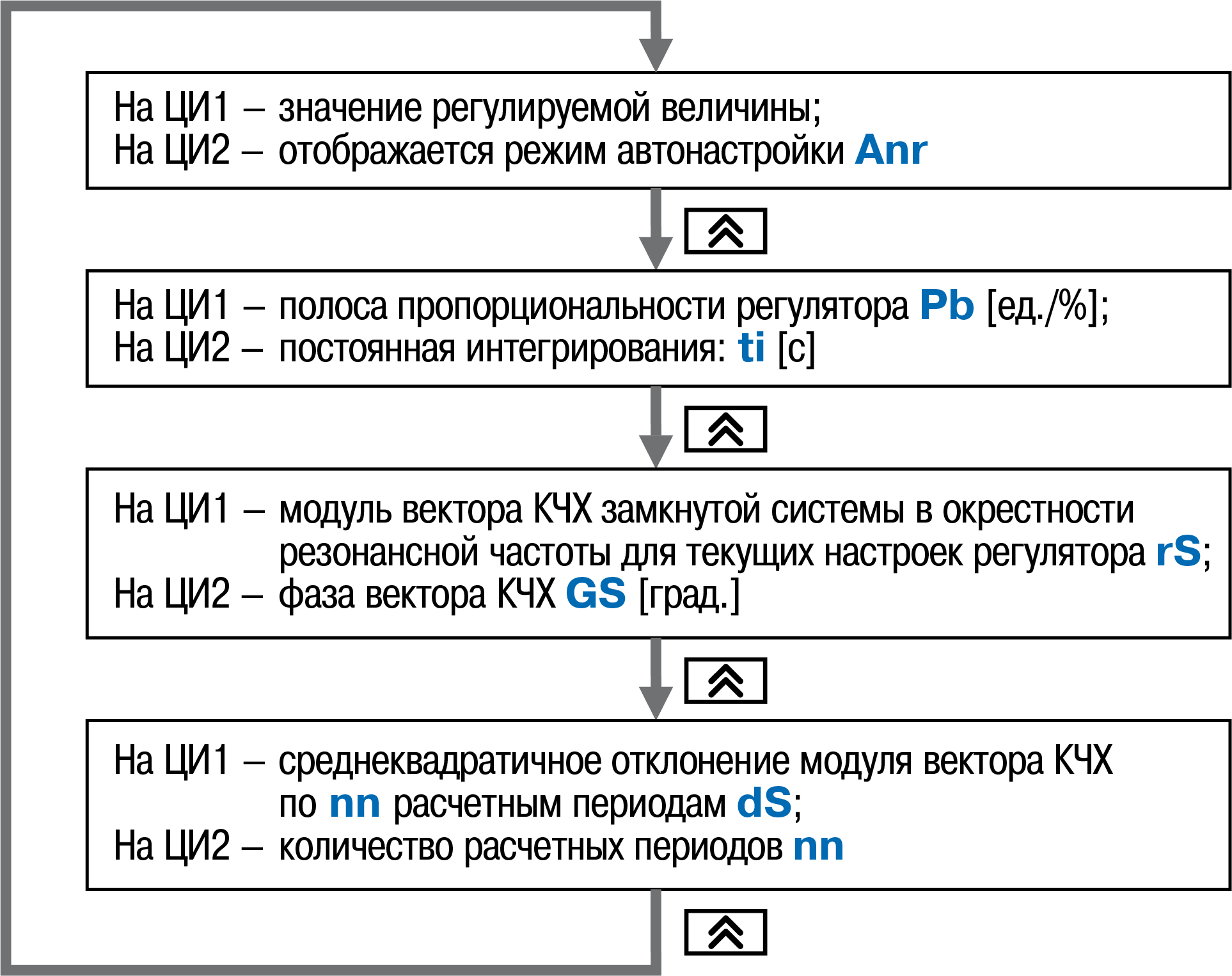
Остановка автонастройки
В процессе эксплуатации прибора могут возникнуть ситуации, когда процесс автонастройки следует прервать.
Для остановки автонастройки следует выполнить:
Нажать кнопку
.На ЦИ1 отображается: HALT.
Прибор запрашивает подтверждение выхода.
Для подтверждения выхода из автонастройки нажать
. Для возобновления автонастройки нажать . Прибор переходит в Рабочий режим индикации
(при отмене – возвращается в режим Автонастройки).
Возможные проблемы при проведении автонастройки
Проблемы при АНР и способы их устранения
Проблема | Показания | Возможные причины | Способы устранения | |
|---|---|---|---|---|
ЦИ2 | ЦИ1 | |||
| Автонастройка не запускается | STOP (StoP) мигает | SP.PW (SP.Pw) | Попытка запустить АНР, когда тип уставки задан как «мощность» | Изменить Тип уставки при работе прибора |
| Автонастройка завершилась неудачно | FAIL (FAiL) | N.LIN (n.Lin) | Объект управления существенно нелинеен (например, нагрев происходит значительно быстрее охлаждения; ИМ выходит на 100 % мощности) | Уменьшить амплитуду воздействия (параметр YdoP) или изменить значение Уставки |
| DSKO (dSKo) | Число периодов превысило допустимое значение; амплитуды колебаний этих периодов значительно отличаются друг от друга (возможно при сильных помехах) | Увеличить амплитуду воздействий (параметр YdoP) или допуск среднеквадратичного отклонения (параметр dSKo) | ||
Период возмущающих колебаний слишком мал | Увеличить интегральную постоянную (параметр ti) | |||
| PB (Pb) | Вычисленное значение полосы пропорциональности недопустимо и выходит за пределы [0,001...9999] | Увеличить амплитуду воздействий (параметр YdoP) и повторить автонастройку
Если она закончится с тем же результатом, использовать двухпозиционный (ON/OFF) регулятор | ||
| TI (ti) | Вычисленное значение постоянной интегрирования недопустимо и выходит за пределы [0...65535] | |||
| P.CLD (P.CLd) | Вычисленное значение коэффициента холодильника недопустимо и выходит за пределы [0,01...10,00] | |||
Ручная подстройка ПИД-регулятора
Ручная подстройка осуществляется итерационным методом с оценкой процесса по двум показателям:
- наличие колебаний;
- переход графика регулируемой величины через уставку.
Настройка ПИД-регулятора может пройти некорректно в следующих системах:
- с непрогнозируемыми внешними возмущающими воздействиями;
- с разнородными нагрузками (например, ГВС днем и вечером).
В зависимости от показателей параметры корректируются по рекомендациям:
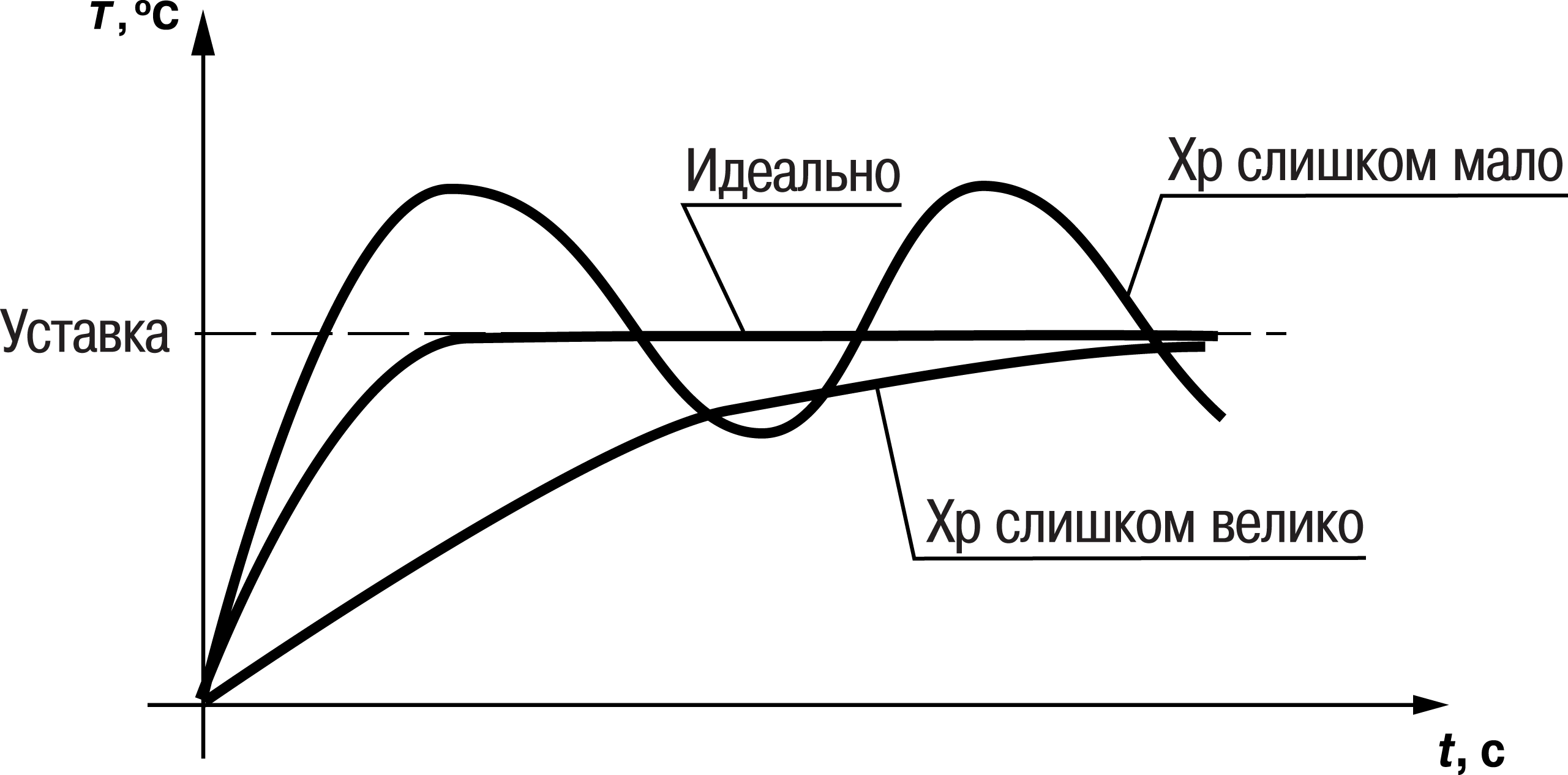
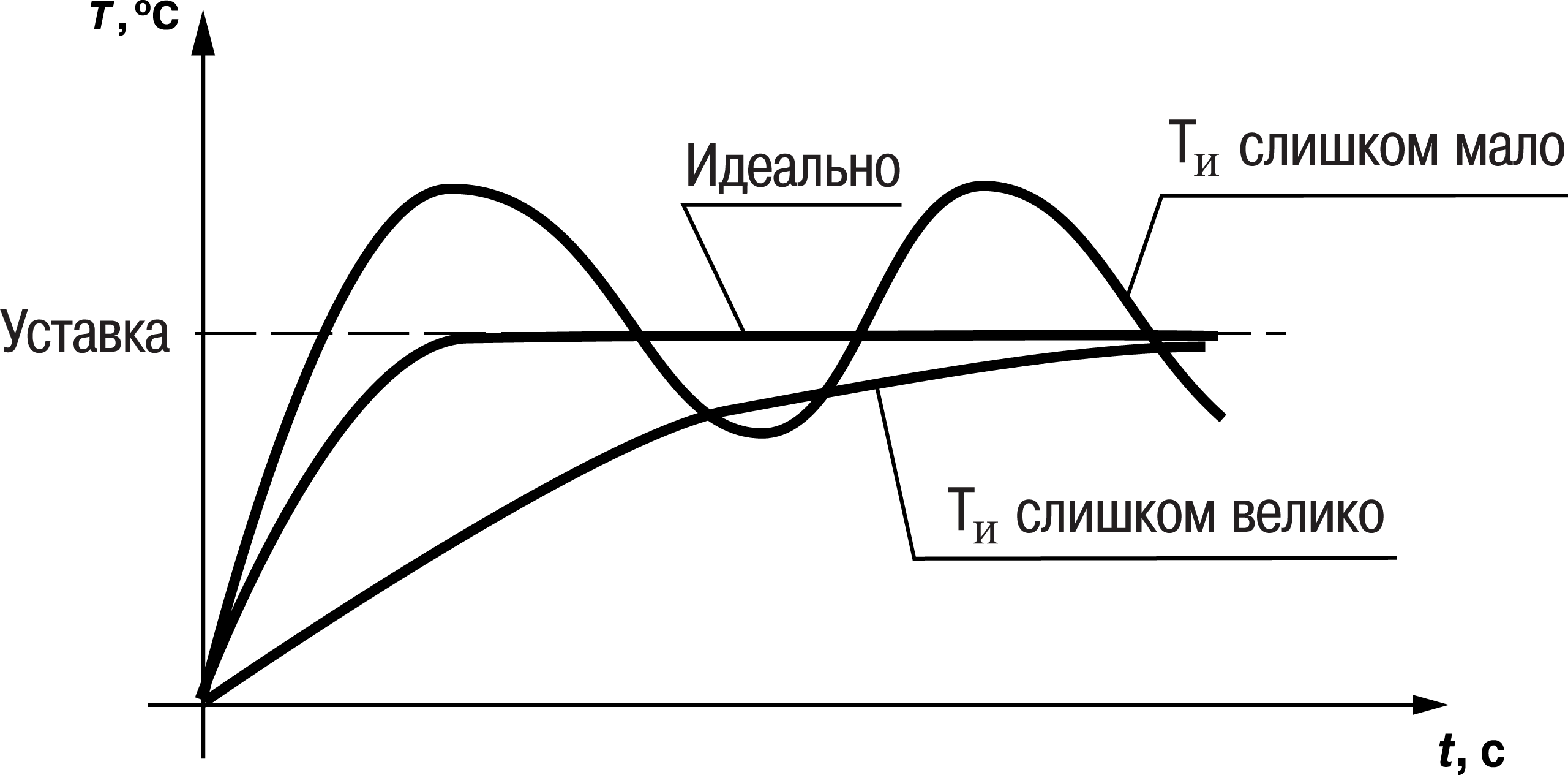
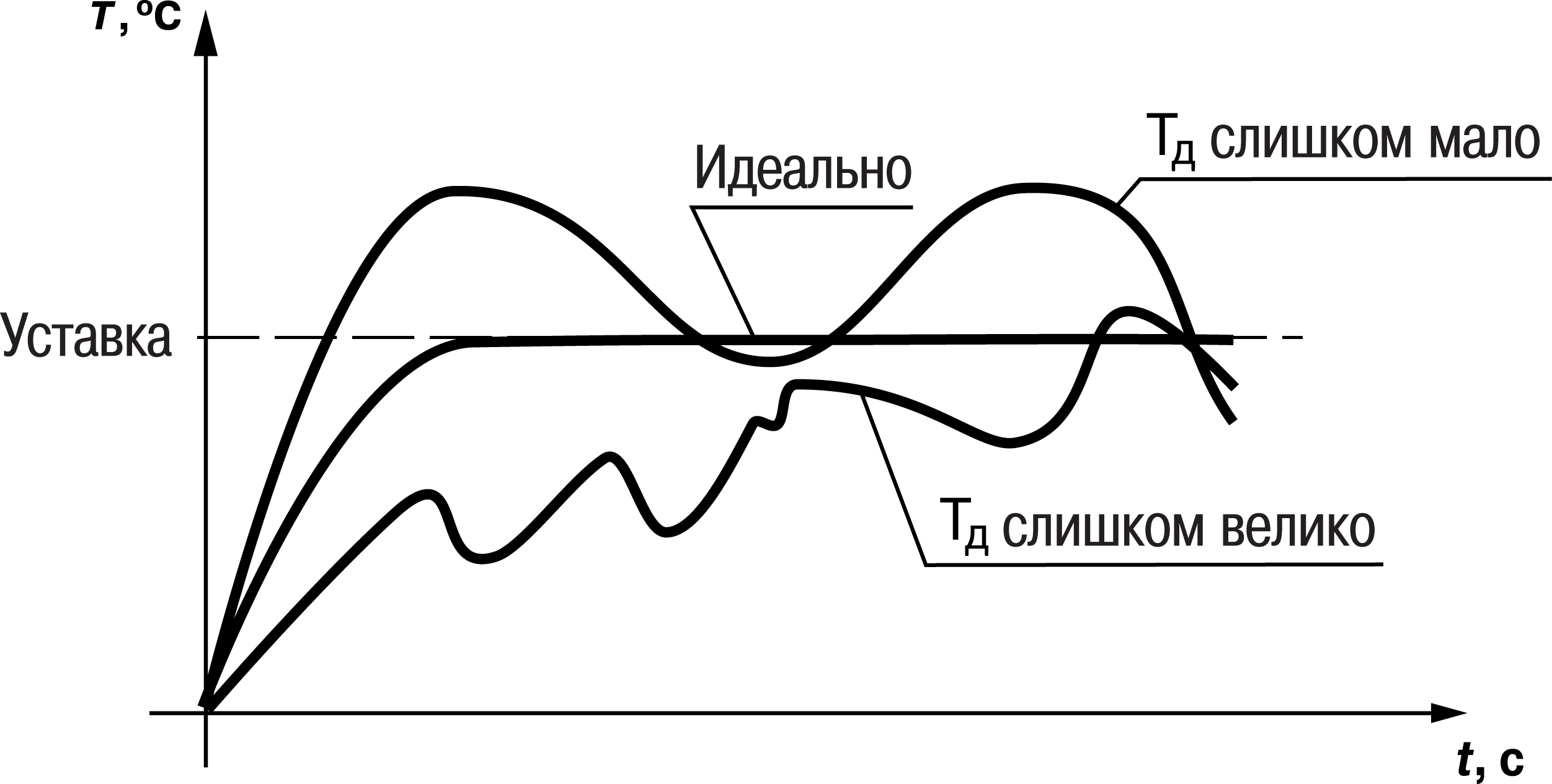
- увеличение параметра Кп (уменьшение Xp) способствует увеличению быстродействия регулятора, но амплитуда колебаний регулируемой величины может возрасти до недопустимого уровня;
- уменьшение Кп (увеличение Xp) способствует уменьшению колебаний регулируемой величины, вплоть до исчезновения, но ухудшается быстродействие регулятора и повышается вероятность колебаний регулируемой величины;
- при завышенном значении Ти процесс подхода регулируемой величины к уставке становится односторонним даже при наличии колебаний, но быстродействие регулятора уменьшается;
- при заниженном значении Ти появляется значительный переход регулируемой величины через уставку, но существенно ухудшается быстродействие регулятора и повышается вероятность колебаний регулируемой величины;
- увеличение Тд способствует повышению быстродействия системы, но повышается ее чувствительность к помехам и возможно появление высокочастотных колебаний регулируемой величины с малым периодом.
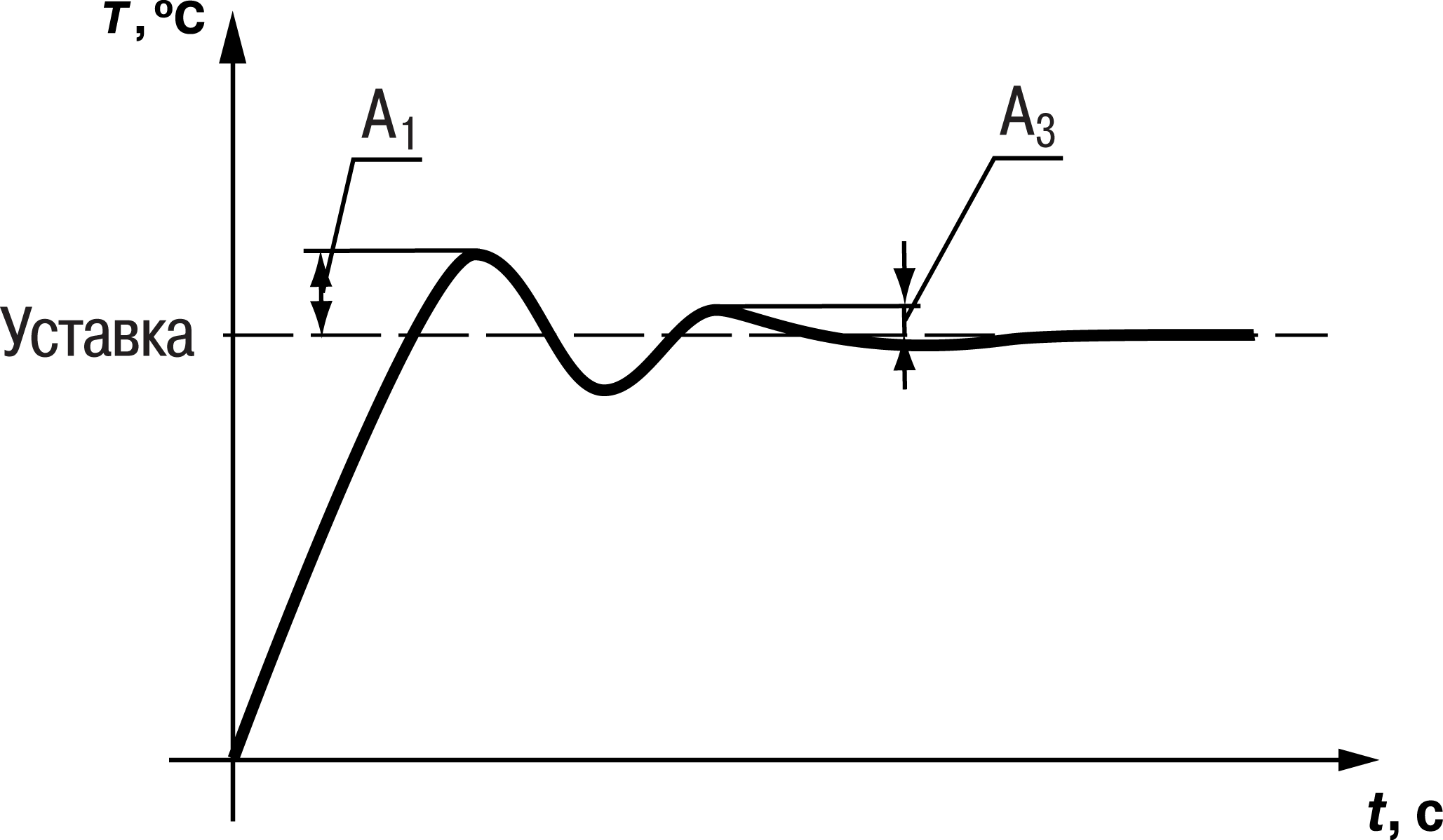
При оптимальной подстройке регулятора график регулируемой величины должен иметь минимальное значение показателя ошибки регулирования (А1) при достаточно степени затухания φ = 1 – А3/А1 (0,8…0,9).
Пример ручной настройки ПИД-регулятора
Для настройки ПИД-регулятора следует:
На приборе установить (диапазон параметров приведен в Приложении Настраиваемые параметры) следующие значения:
- ХP = 9999;
- τи = 0;
- τд = 0.
- Задать уставку.
- В ходе наблюдений фиксировать значения регулируемого параметра (скорость и время подхода к уставке).
- В ходе настройки руководствоваться таблицей.
Описание шагов примера
Шаг | Параметры | Оценка процесса | Решение |
|---|---|---|---|
| 1 | ХP = 9999 τи = 0 τд = 0 | Долго подходит к уставке, не пересекает | Уменьшить ХP (в два раза) |
| 2 | ХP = 5000 τи = 0 τд = 0 | Быстрее подходит к уставке, не пересекает | Уменьшить ХP (в два раза) |
| 3 | Сделать несколько итераций, до тех пор, пока появятся признаки колебаний. Измерить период (Тк). Для следующей итерации можно принять τи = Тк / 2 для ускорения процесса настройки | 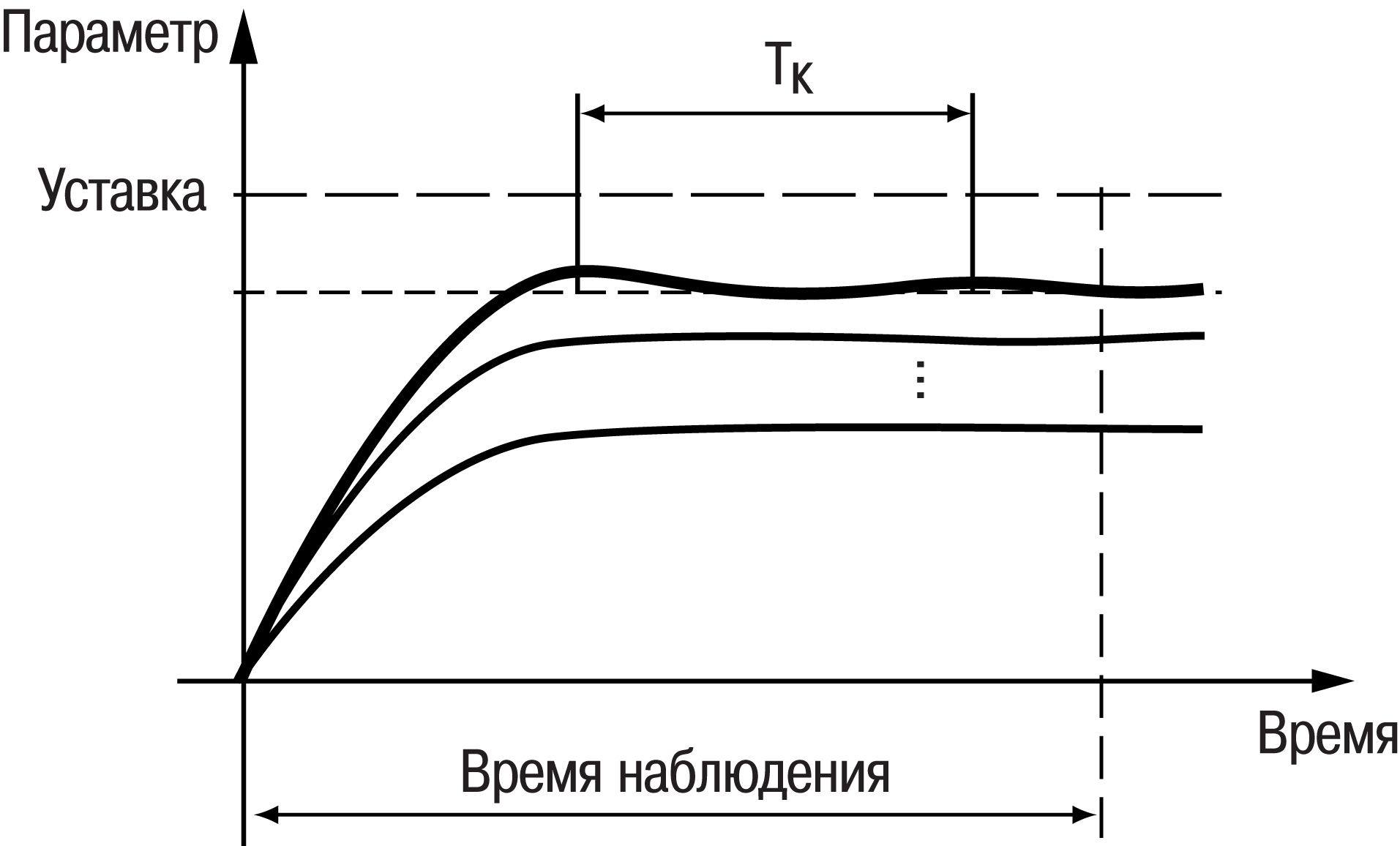 | |
| 4 | ХP = 500 τи = Тк / 2 τд = 0 | Очень быстро подходит к уставке, не пересекает, колебательность усилилась | Зафиксировать ХP , изменить τи |
| 5 | ХP = 500 τи = 2000 τд = 0 | Подходит к уставке, не пересекает | Уменьшить τи (в два раза) |
| 6 | ХP = 500 τи = 1000 τд = 0 | Подходит к уставке, не пересекает | Уменьшить τи и ХP (в два раза) |
| 7 | Сделать несколько итераций до тех пор, пока регулируемая величина не пересечет уставку и начнет колебания около этого значения | 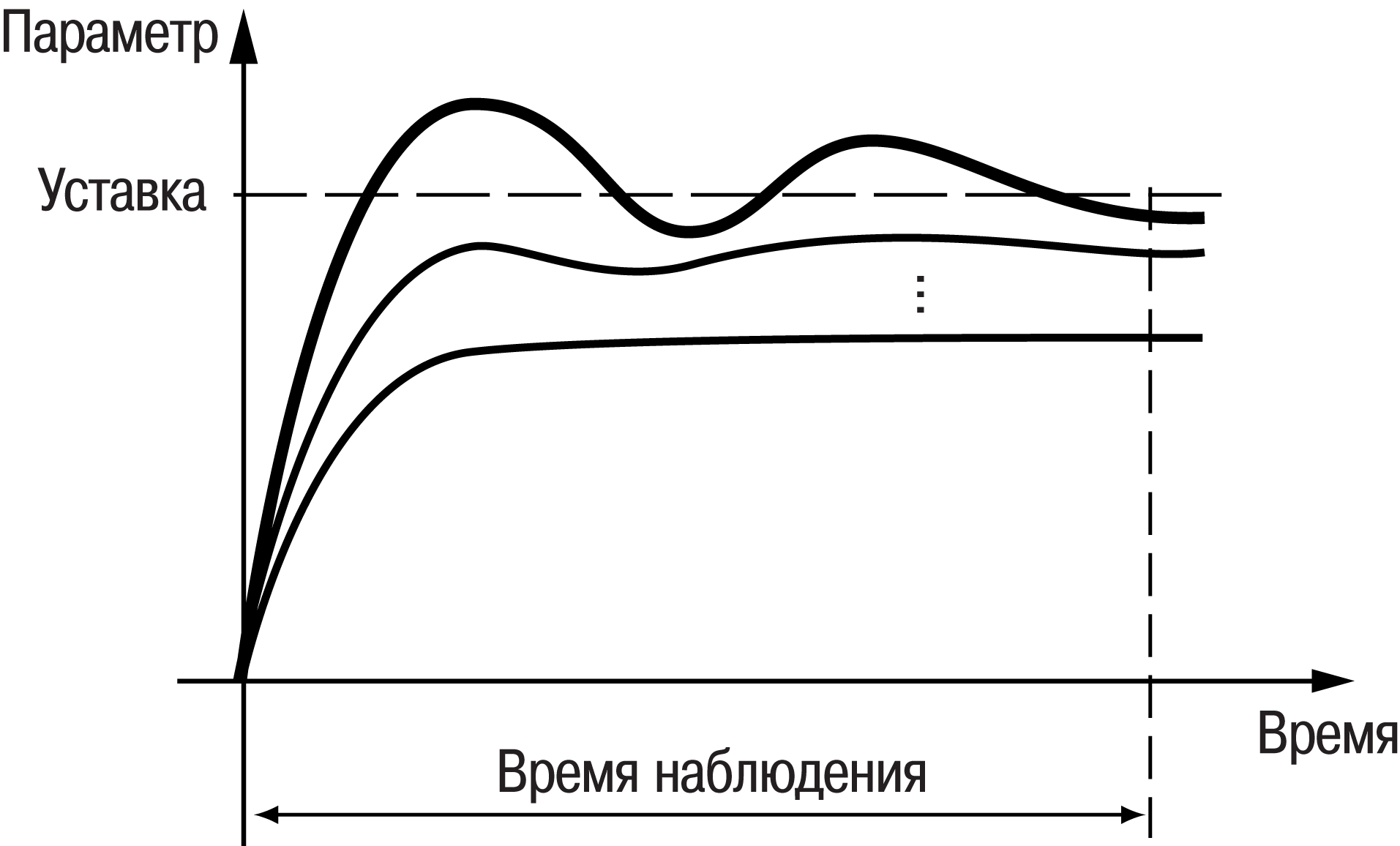 | |
| 8 | ХP = 125 τи = 250 τд = 0 | Регулируемая величина пересекла уставку. Проверить соотношение амплитуд А3 / А1 ≈ 0,1 Если колебания удовлетворяют условию – регулятор настроен. Если нет — фиксировать τи и ХP, задать τд = τи / 5 | 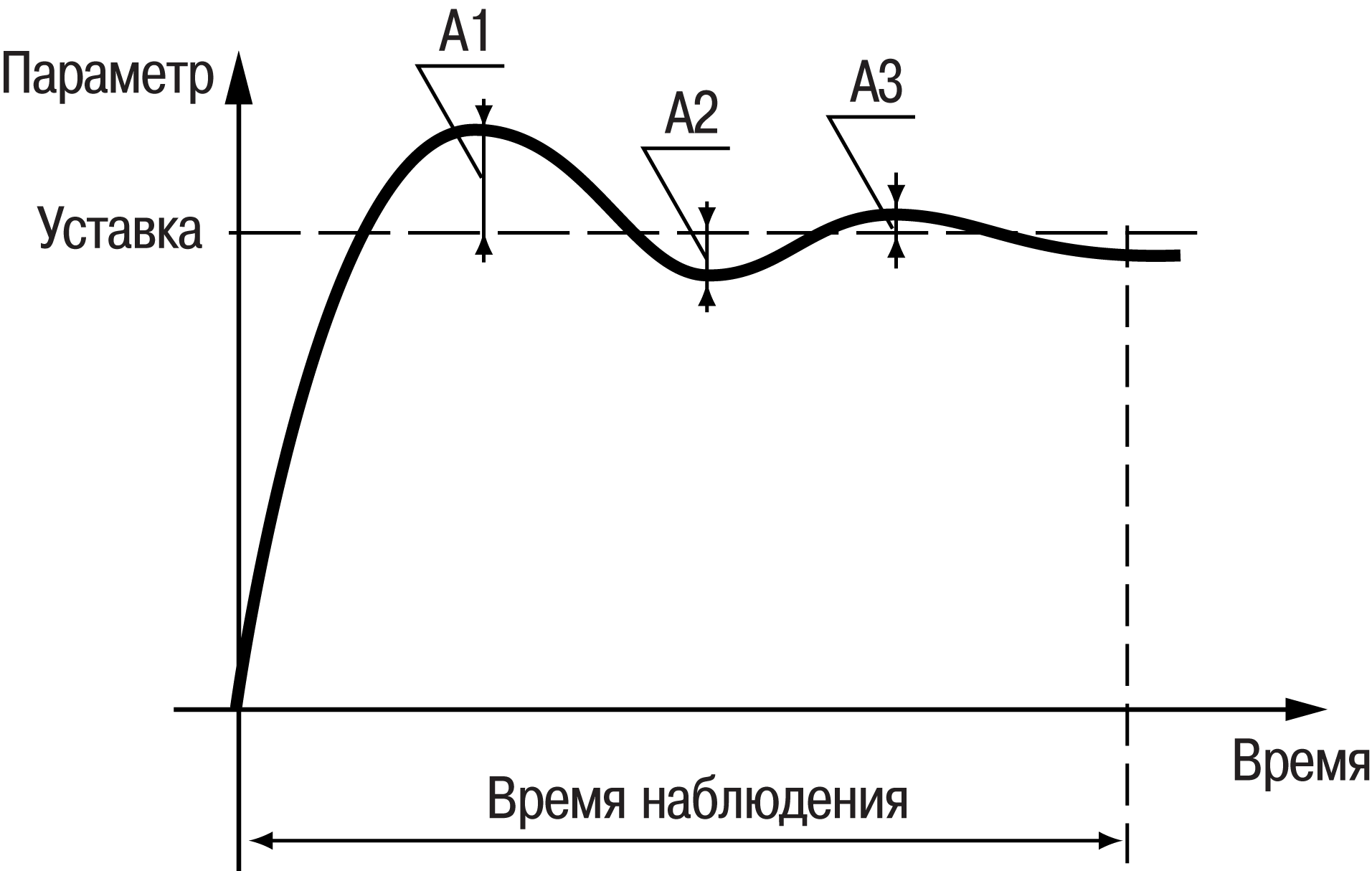 |
| 9 | ХP = 125 τи = 250 τд = 50 | Проверить соотношение амплитуд А3 / А1 ≈ 0,1 Не удовлетворяет условию — уменьшить i на 10 % | |
| 10 | ХP = 125 τи = 250 τд = 40 | Регулятор настроен | |
Двухпозиционный регулятор (ON/OFF)
Двухпозиционный регулятор (ON/OFF) – компаратор – вырабатывает выходную мощность, которая имеет только два значения: минимальное и максимальное. При работе прибора с ИМ типа «нагреватель-холодильник» это следующие значения:
«–1» (–100 %) «холодильник» включен, «нагреватель» выключен;
«0» (0 %) – «нагреватель» и «холодильник» выключены;
«+1» (100 %) – «нагреватель» включен, «холодильник» выключен.
Двухпозиционный регулятор типа «нагреватель» включает «нагреватель» при значениях регулируемой величины, меньших Уставки, и выключает при значениях регулируемой величины, больших Уставки. Двухпозиционный регулятор типа «холодильник» включает «холодильник» при значениях регулируемой величины, больших Уставки, и выключает при значениях регулируемой величины, меньших Уставки. Так работает двухпозиционный регулятор в отсутствие гистерезиса.
Задается значение Гистерезиса двухпозиционного регулятора HYS.C. Состояние ИМ будет переключаться в тот момент, когда отклонение регулируемой величины от Уставки достигнет половины величины HYS.C (см. рисунок).
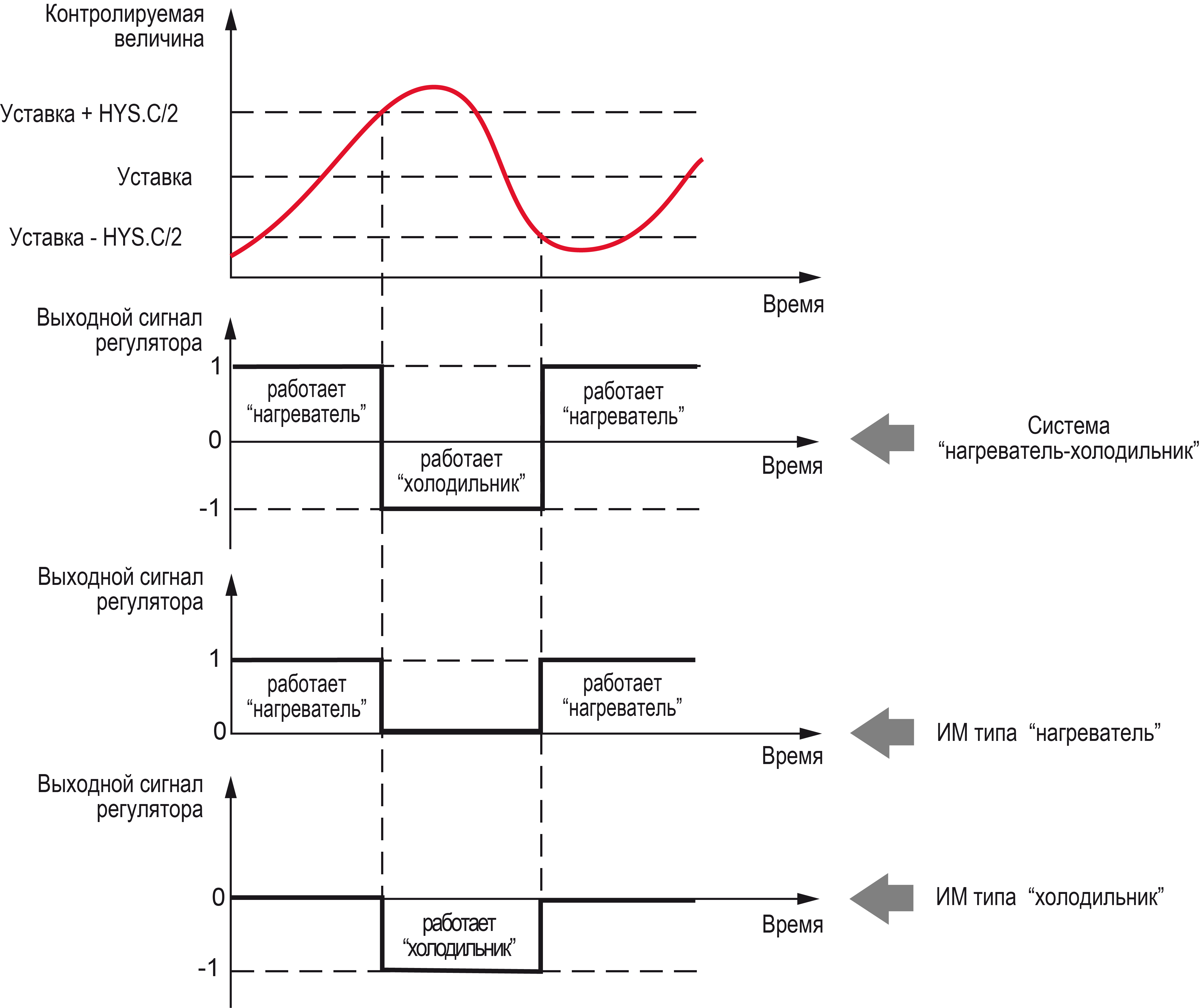
Гистерезис – это зона, в которой происходит отложенное по достигаемому регулируемой величиной уровню переключение регулятора. Пока регулируемая величина находится внутри этой зоны, регулятор не переключается, а сохраняет прежнее состояние, которое было у него до входа в зону гистерезиса.
Гистерезис делится пополам и откладывается от уставки в обе стороны при нулевом значении зоны нечувствительности.
Последние два графика на рисунке приведены для случаев, когда в системе присутствует только один тип ИМ. Один из диапазонов регулирования – отрицательный (при применении «нагревателя») или положительный (при применении «холодильника») – обрезается, и выход прибора становится равным 0. Исключение отрицательной (положительной) зоны производится в ПС.
Зона нечувствительности
Зона нечувствительности задается для исключения ненужных срабатываний Регулятора при небольшом отклонении контролируемой величины от Уставки. Прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны.
Зона нечувствительности используется при функционировании как ПИД-регулятора, так и Двухпозиционного регулятора.
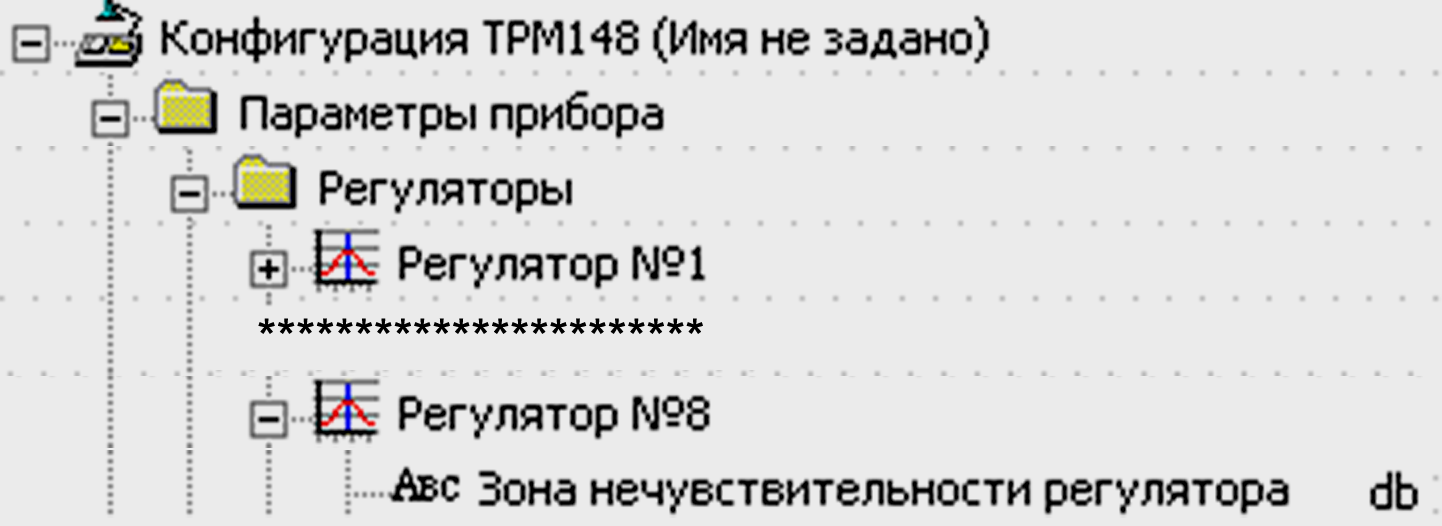
Значение зоны нечувствительности задается параметром db в единицах регулируемой величины.
Пример
Уставка = 60 °С, db = 10 °С. В диапазоне 55…65 °С Регулятор не будет вырабатывать управляющего воздействия.На рисунке представлено использование параметра db при функционировании двухпозиционного регулятора при подключении системы «нагреватель–холодильник».
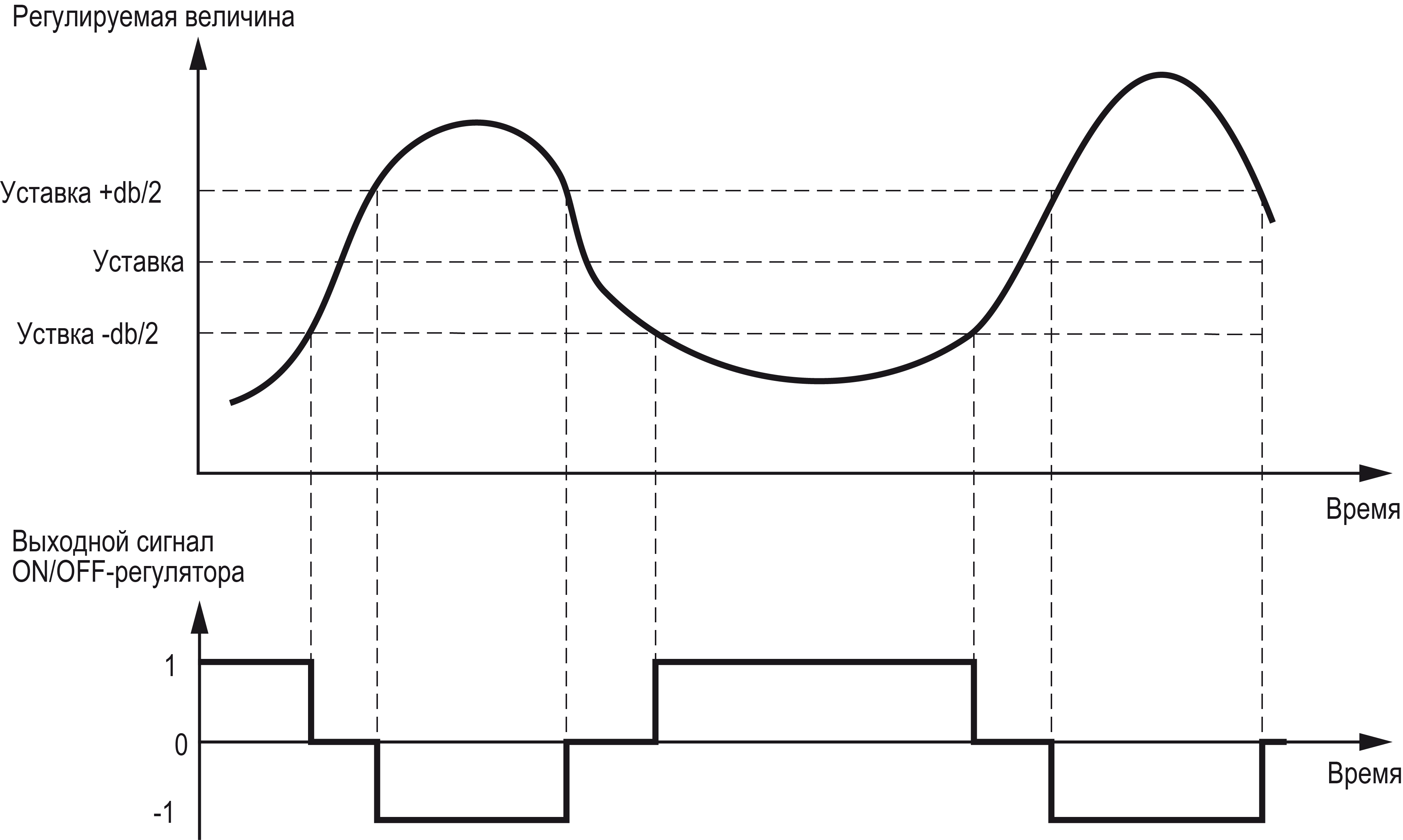
Способ регулирования системы «нагреватель – холодильник» с заданием зоны нечувствительности предотвращает частые переключения ИМ в зоне, близкой к уставке, и не приводит к «раскачиванию» системы регулирования.
Если используется система с одним типом исполнительных механизмов (например, только с «нагревателями»), то более эффективным будет задание не зоны нечувствительности, а гистерезиса.
Работа двухпозиционного регулятора при одновременном учете зоны нечувствительности и гистерезиса проиллюстрирована на рисунке ниже.
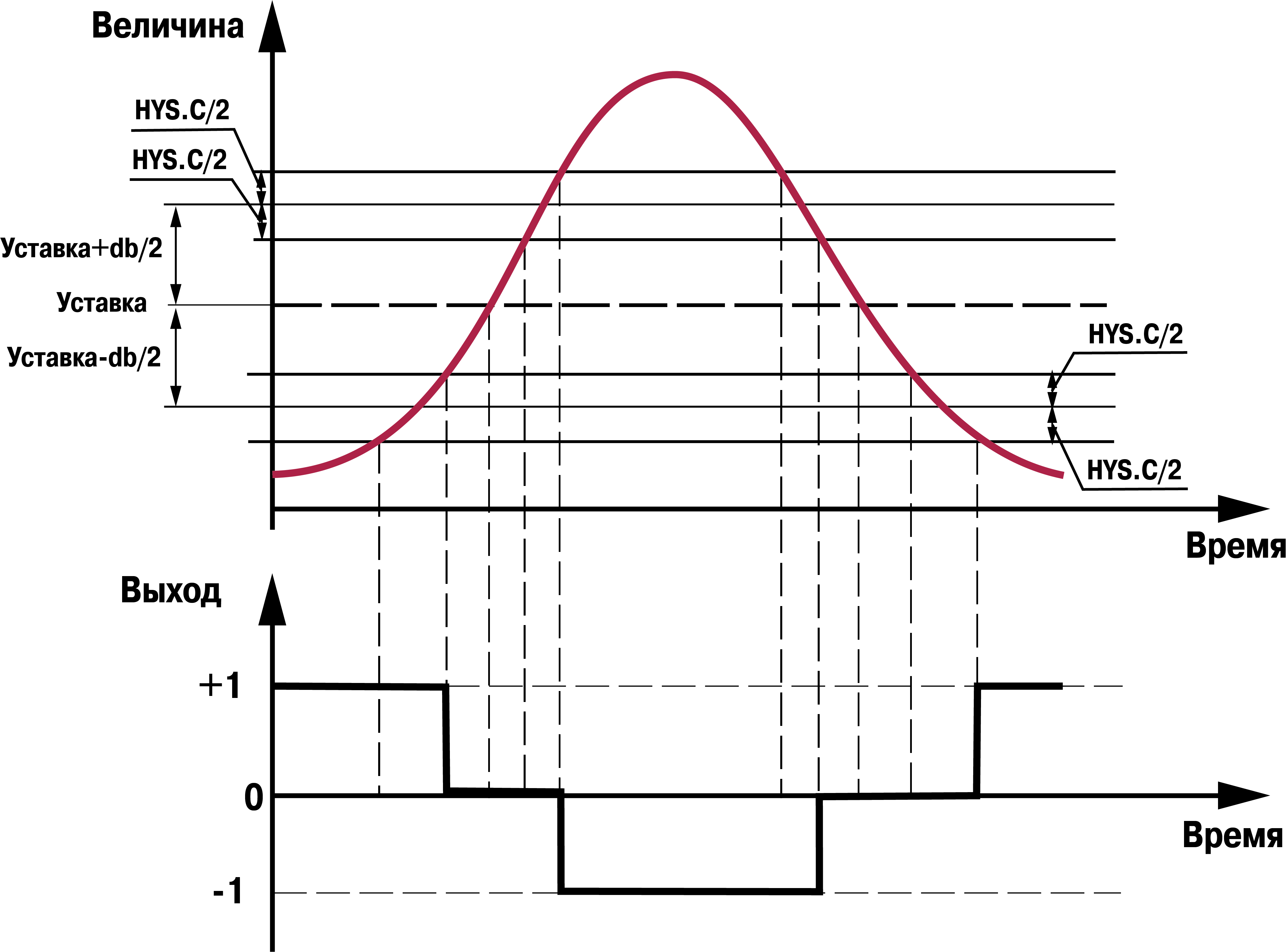
Задержки и удержания
Для двухпозиционного регулятора могут быть заданы задержки переключения, а также минимальные значения времени удержания во включенном и выключенном состоянии.
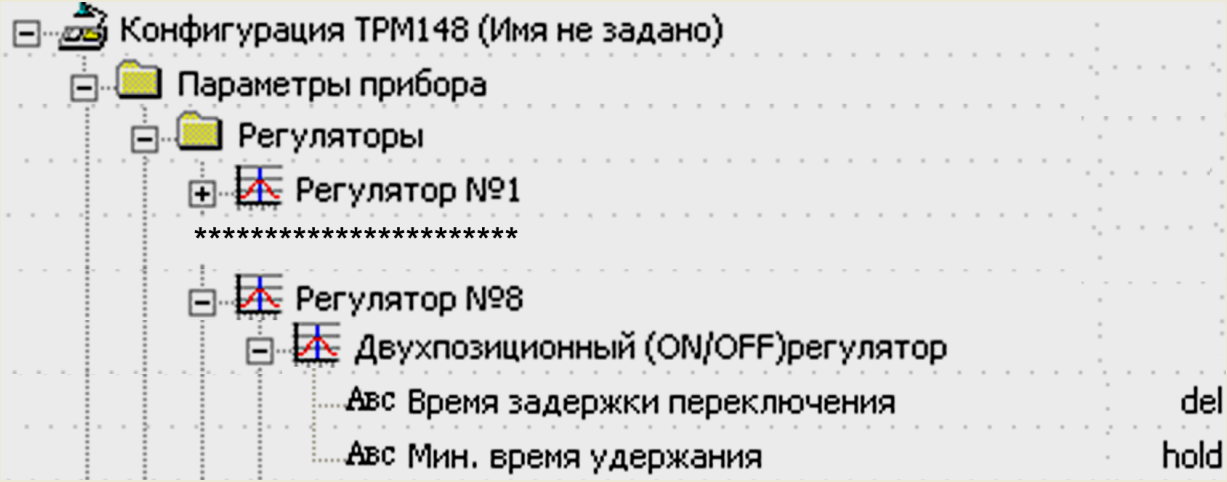
Задержки переключения задаются параметром dEL и служат для задержки во времени переключения выходного сигнала прибора с целью фильтрации кратковременных и ложных срабатываний регулятора и предотвращения пиковых включений исполнительных механизмов.
Время задержки начинает отсчитываться с момента переключения выходного сигнала регулятора, и переключение выходного сигнала прибора блокируется до момента истечения времени задержки. По истечении задержки проверяется состояние регулятора, и если его значение не изменилось, прибор переключает выходной сигнал. Состояние ИМ изменяется. Действие задержки прекращается, если до истечения ее времени произошло еще одно переключение выходного сигнала регулятора.
Удержание во включенном/выключенном состоянии – минимальное время, в течение которого ИМ будет выключен или включен. Реализуется следующим образом: регулятор отсчитывает время от момента происшедшего переключения и блокирует иное переключение, если не прошло требуемое время удержания.
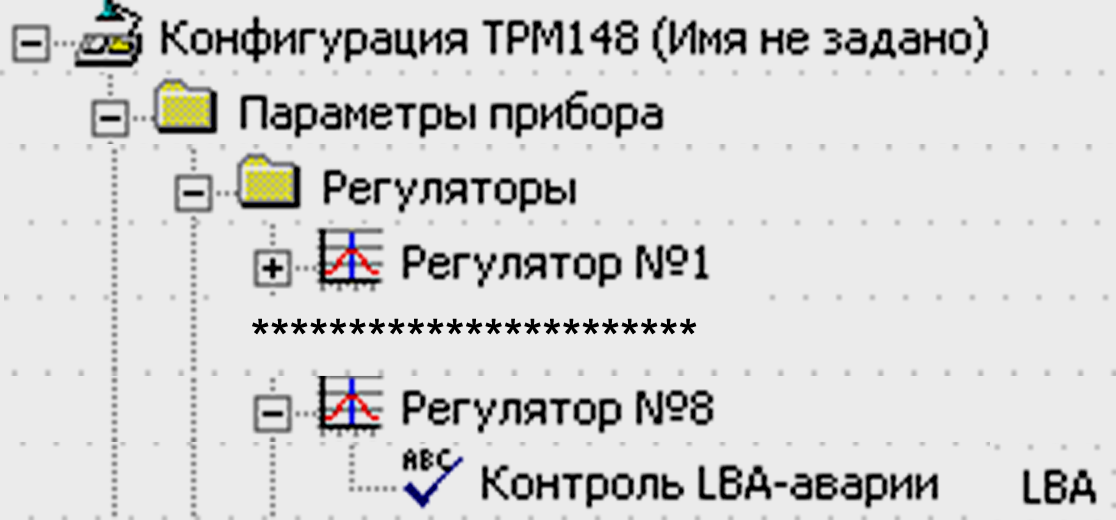
Этот механизм используется для защиты исполнительных механизмов, которые по своим техническим характеристикам не могут запускаться, пока не простояли определенного времени в нерабочем состоянии или тех, которые не могут выключаться, не отработав определенное время.
Удержание отсчитывается после истечения времени задержки (если она была задана) и произведенного переключения состояния.
Удержание задается параметром HoLd.
Функционирование Регулятора с заданными задержками и удержаниями проиллюстрировано на рисунке.
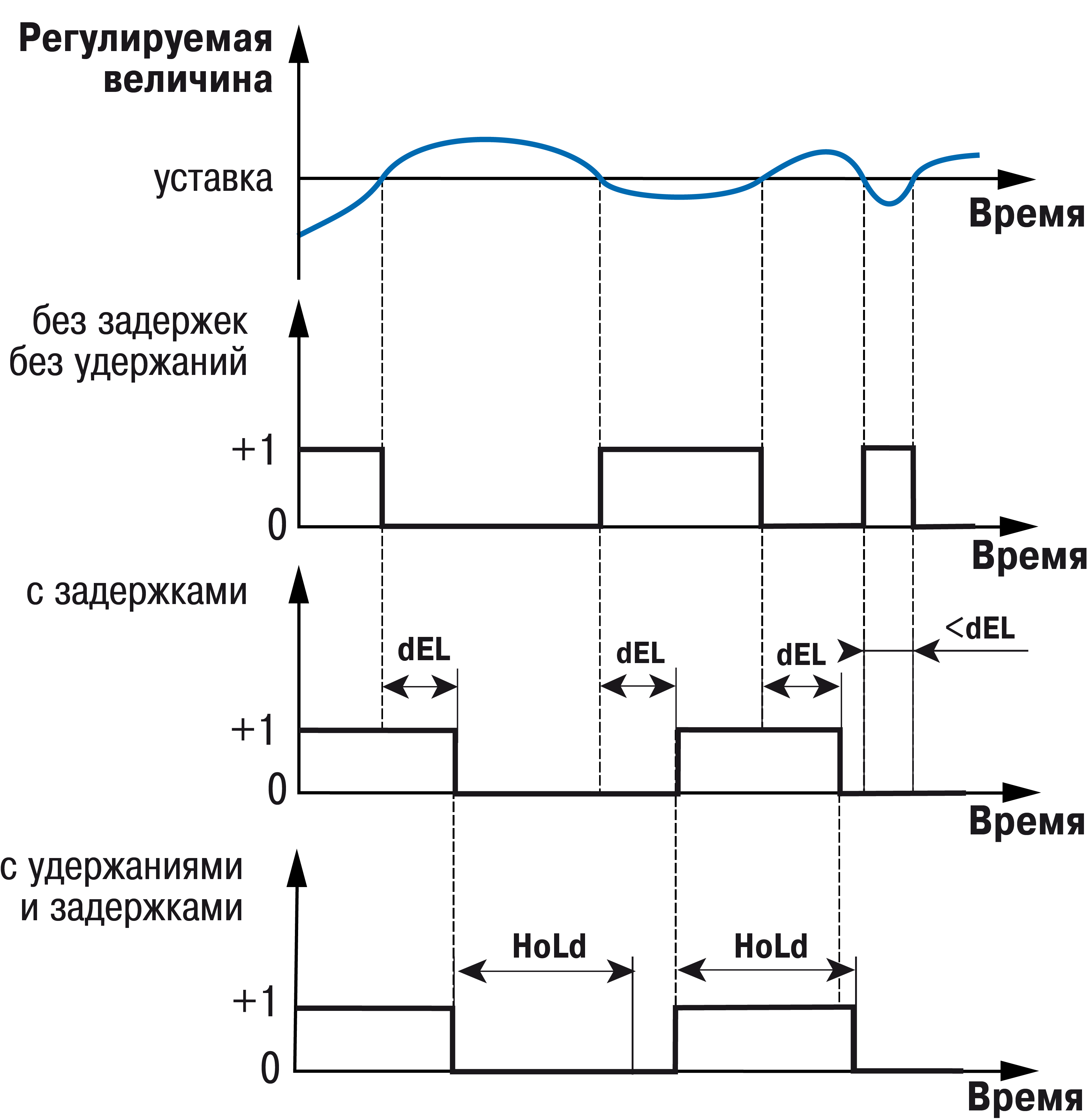
Контроль целостности контура регулирования (LBA-аварии)
У прибора есть режим косвенного контроля исправности ИМ, подключаемого к выходу прибора.
Если исправность датчиков прибор определяет непосредственно по контролю сигнала на своем входе, то исправность ВЭ и ИМ напрямую определить нельзя. Однако можно косвенно определить их исправность, анализируя реакцию объекта регулирования на подачу управляющего воздействия. Если регулируемые параметры объекта не меняются в должных пределах при подаче управляющего воздействия – значит, ИМ неисправен. Такой анализ называется контролем LBA-аварии (Loop Brake Alarm).
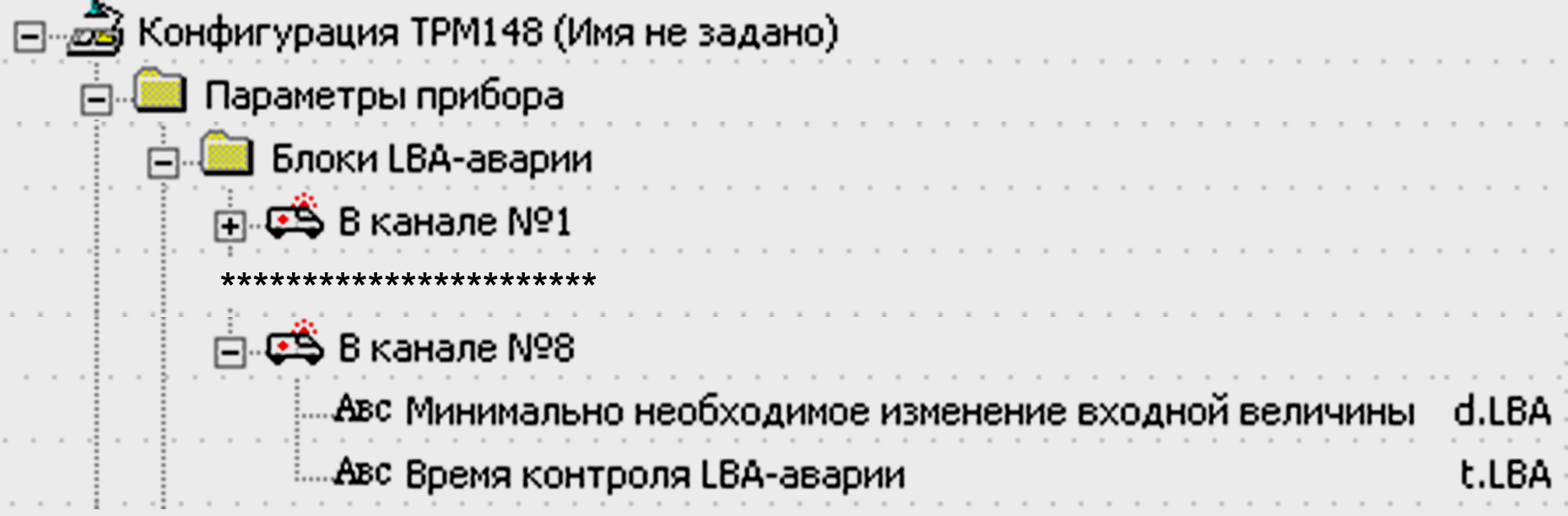
При достижении на ИМ +100 % или –100 % мощности включается отсчет времени, и если за время (параметр t.LBA) регулируемая величина (величина на выходе вычислителя в канале) не изменится на требуемую величину (параметр d.LBA), то прибор реагирует следующим образом – срабатывает программный модуль LBA-авария, переводя объект в состояние АВАРИЯ.
Выходные устройства прибора. Преобразование
Прибор сконструирован с возможностью использования при эксплуатации нескольких вариантов выходных устройств – исполнительных механизмов и встроенных выходных элементов, служащих для управления ими.
Структурная схема Выходного устройства
Выходной сигнал Регулятора подается на Выходное устройство.
Структура Выходного устройства прибора позволяет осуществлять управление сложными ИМ: задвижками, многоступенчатыми нагревателями, системами «нагреватель–холодильник», устройствами с аналоговым управлением и т.д.
Всего в приборе может быть организовано восемь ВУ.
Структурная схема Выходного устройства прибора представлена на рисунке.
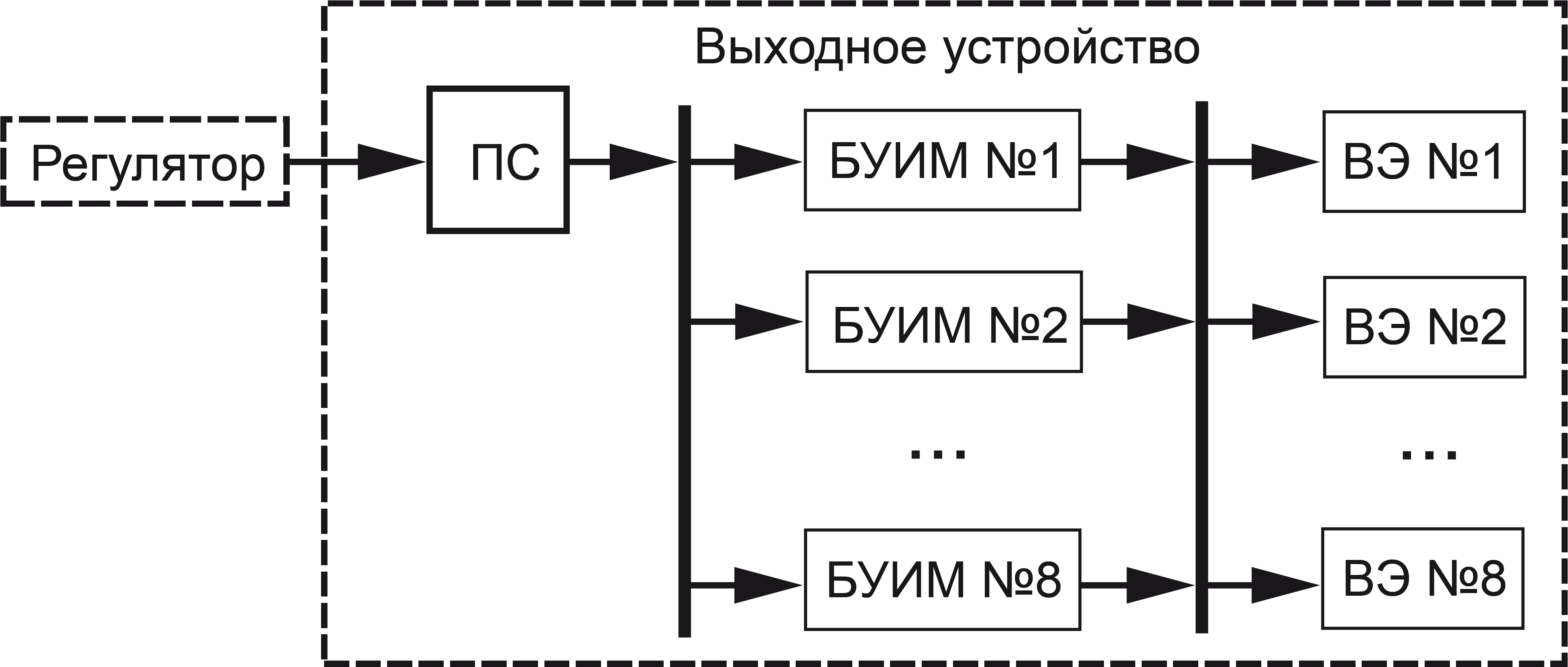
В состав Выходного устройства входят следующие блоки:
преобразователь сигнала;
блоки управления исполнительными механизмами;
выходные элементы.
В состав ВУ прибора может входить до 8 БУИМ и 8 ВЭ.
Один БУИМ может обслуживать несколько ВЭ.
Общее количество ВЭ в приборе не может быть больше восьми.
Общее количество БУИМ в приборе не может быть больше восьми.
Преобразователь сигнала
ПС выполняет две основные функции: ограничение выходного сигнала Регулятора и его распределение.
Задание диапазона выходного сигнала
При типе «значение» уставки в канале (параметр P.-SP) следует определить диапазон изменения величины выходного сигнала Регулятора. Диапазон задается двумя параметрами: максимальное значение P.UPr и минимальное P.min, которые определяются рабочим диапазоном ИМ. Эти параметры задаются в процентах от максимальной мощности, которую можно подать на ИМ. Если Регулятор выдает значение мощности, находящееся за пределами заданного диапазона, то оно принимается равным P.UPr или P.min, соответственно.
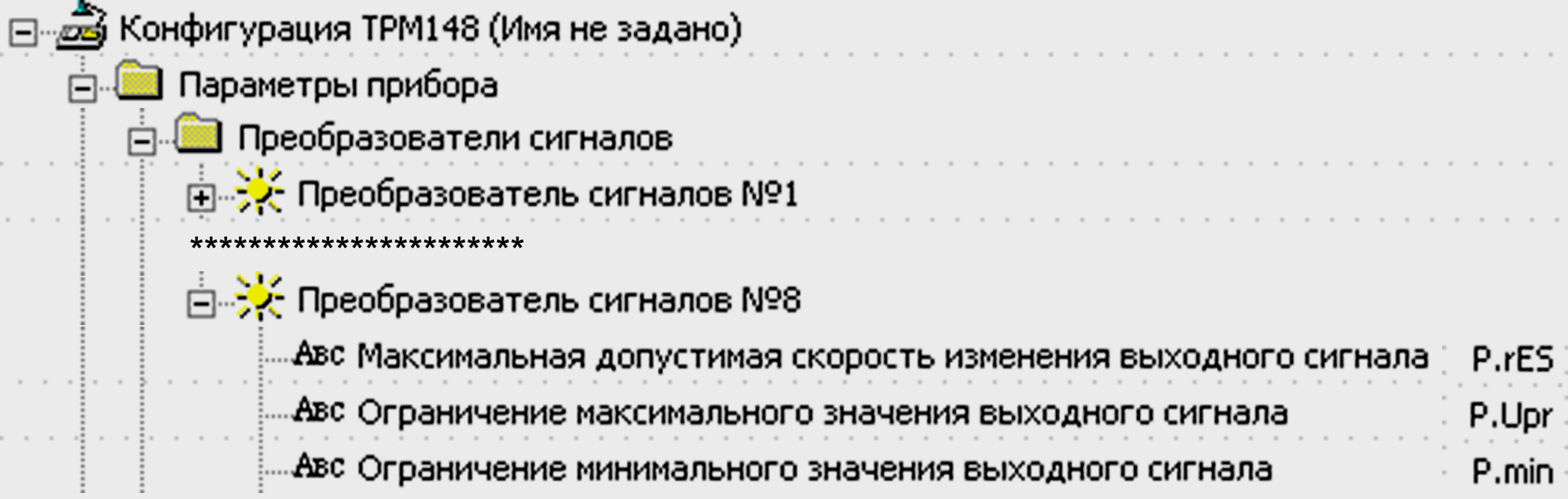
Для безударного включения ИМ следует ограничить скорость роста выходного сигнала Регулятора. Максимальная скорость изменения выходного сигнала задается параметром P.rES в %/мин.
Пример
При использовании только «нагревателя» следует установить ограничение от 0 до 100 %. То есть установить P.min «0».Пример
В климатокамере нельзя допустить, чтобы нагреватель работал менее чем на 20 % своей мощности. Для выполнения этого условия нужно установить Минимальную выходную мощность P.min «20.0».Распределение выходного сигнала
ПС распределяет выходной сигнал по БУИМ. Всего к ПС может быть подключено до восьми БУИМ.
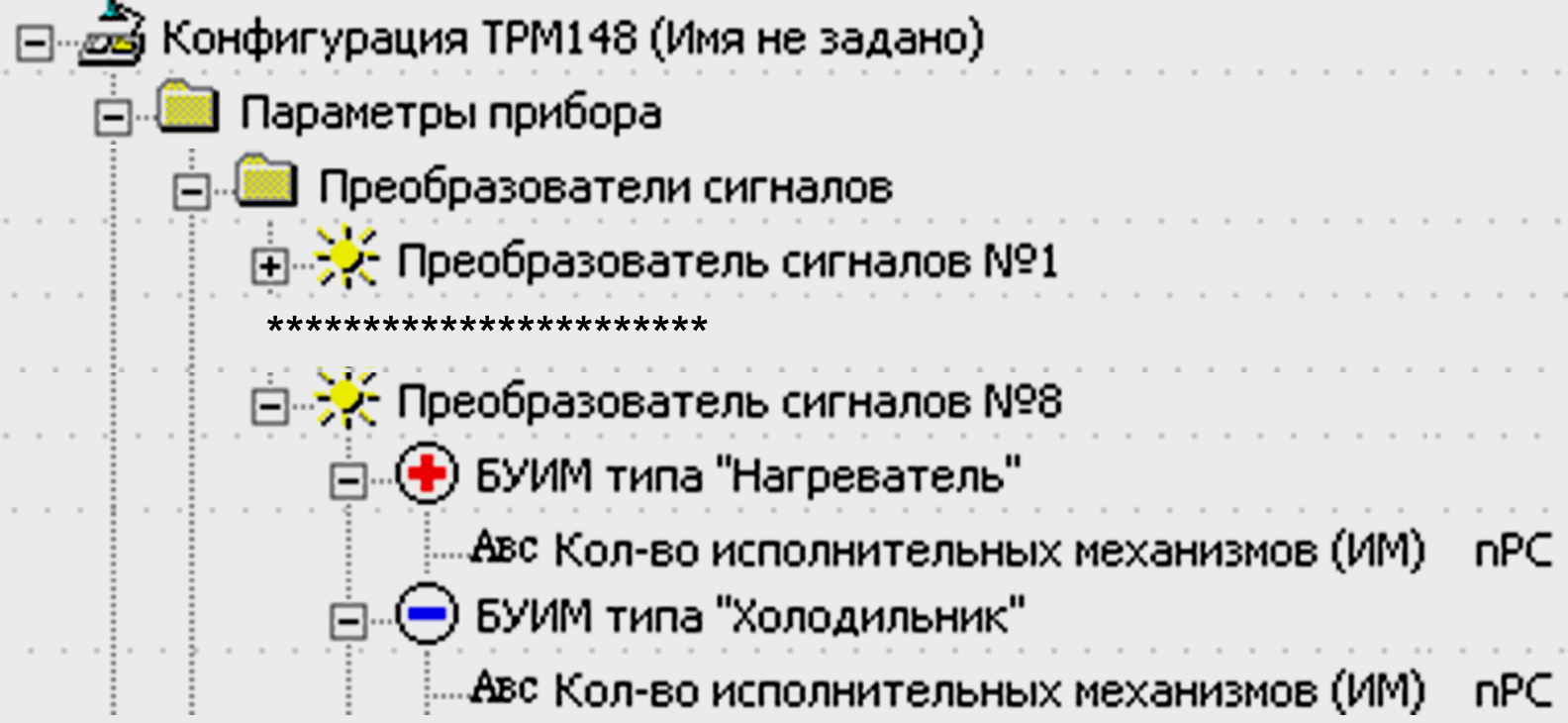
БУИМ подключается в параметре nPC, в котором нужно указать количество подключаемых БУИМ. После задания значения nPC для «нагревателей» к ПС будет подключено соответствующее количество «нагревателей», при задании значения nPC для «холодильников» к ПС будет подключено соответствующее количество холодильников. Допускается подключать к одному ПС одновременно «нагреватели» и «холодильники», но их суммарное количество не должно превышать восьми.
Блок управления исполнительными механизмами
Для каждого ИМ, которым управляет прибор, используется свой БУИМ. Преобразованный сигнал управления ИМ передается на ВЭ, подключенные к БУИМ.
Для БУИМ задаются следующие основные параметры:
тип ИМ;
номер (номера) ВЭ для подключения ИМ;
диапазон сигнала, поступающего с ПС, в котором работает ИМ;
рабочие характеристики для трехпозиционных ИМ.
Типы ИМ и количество ВЭ
Прибор управляет ИМ двух типов:
двухпозиционным или ИМ с аналоговым управлением (ТЭН, клапаном и т. д., а также ИМ, управляемым унифицированным сигналом тока 4..20 мА или напряжения 0...10 В). Для управления таким ИМ используется один ВЭ;
трехпозиционным ИМ (задвижкой). Трехпозиционныq ИМ управляется сигналами типа «больше/меньше/стоп». Прибор использует два ВЭ: один дает команду на открытие («больше»), другой – на закрытие («меньше»). Подробно об управлении трехпозиционным ИМ.
Тип ИМ задается параметром SE.P.
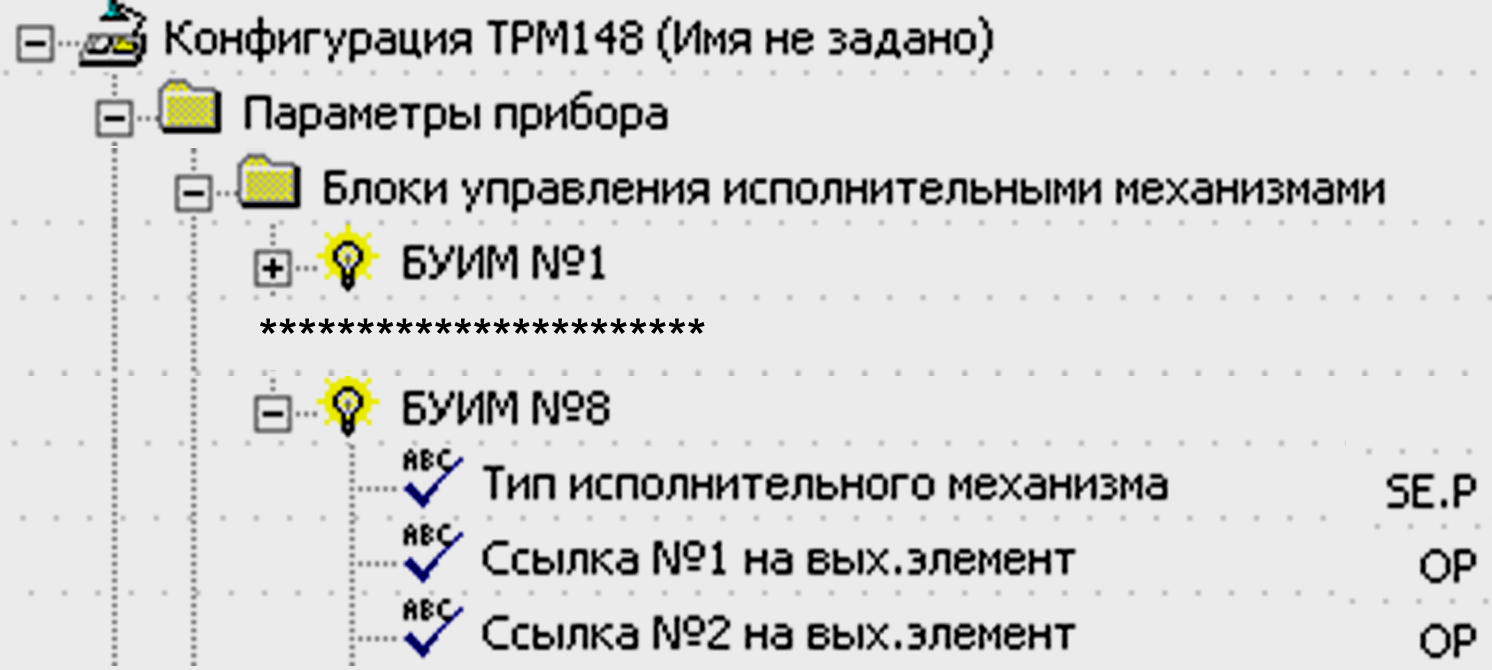
ВЭ для управления ИМ назначаются параметром OP. Первый ВЭ соответствует открытию задвижки, второй ВЭ - ее закрытию.
ИМ (как двухпозиционные с аналоговым управлением, так и трехпозиционные) по характеру управляющего воздействия на Объект могут быть двух типов:
«Нагреватели» – ИМ, увеличивающие значение регулируемой величины. Для управления «нагревателями» предназначен положительный диапазон выходного сигнала Регулятора (от 0 до +1).
«Холодильники» – ИМ, уменьшающие значение регулируемой величины. Для управления «холодильниками» предназначен отрицательный диапазон выходного сигнала Регулятора (от –1 до 0).
Тип ИМ определяется при подключении БУИМ к ПС.
Система ИМ «нагреватель–холодильник» содержит по одному или несколько ИМ обоих типов.
При подключении одного БУИМ повторитель сигнала (ПС) будет работать во всем диапазоне выходного сигнала от регулятора (0…1 или – 1…0, для нагревателя и холодильника соответственно).
При управлении системами БУИМ рабочий диапазон конкретного БУИМ определяется заданием значений порогов.
Управление двухпозиционными ИМ
Двухпозиционный ИМ имеет два положения: «вкл.» и «выкл.». Для управления таким ИМ используется один дискретный ВЭ (реле, ключ, симистор), на который выдается ШИМ-сигнал.
В качестве двухпозиционного ИМ используется ИМ с аналоговым управлением. Для этого в приборе применяется ВЭ аналогового типа – ЦАП 4...20 мА или ЦАП 0...10 В.
Аналоговое управление осуществляется по прямо-пропорциональному закону (т. е. 4 мА или 0 В соответствует минимальной мощности ИМ, а 20 мА или 10 В соответствует максимальной мощности ИМ).
Аналоговый сигнал и скважность ШИМ пропорциональны значению выходного сигнала, пришедшего от ПС.
Номер ВЭ, к которому подключается двухпозиционный ИМ, задается параметром ОР.
Управление трехпозиционным ИМ (задвижкой)
Трехпозиционный ИМ имеет три управляющих сигнала: «больше», «меньше», «стоп». Для управления таким ИМ нужно два ВЭ.
Прибор ТРМ148 управляет трехпозиционными ИМ с датчиком положения или без него.
Работа с датчиком положения ИМ проиллюстрирована на рисунке , (1).
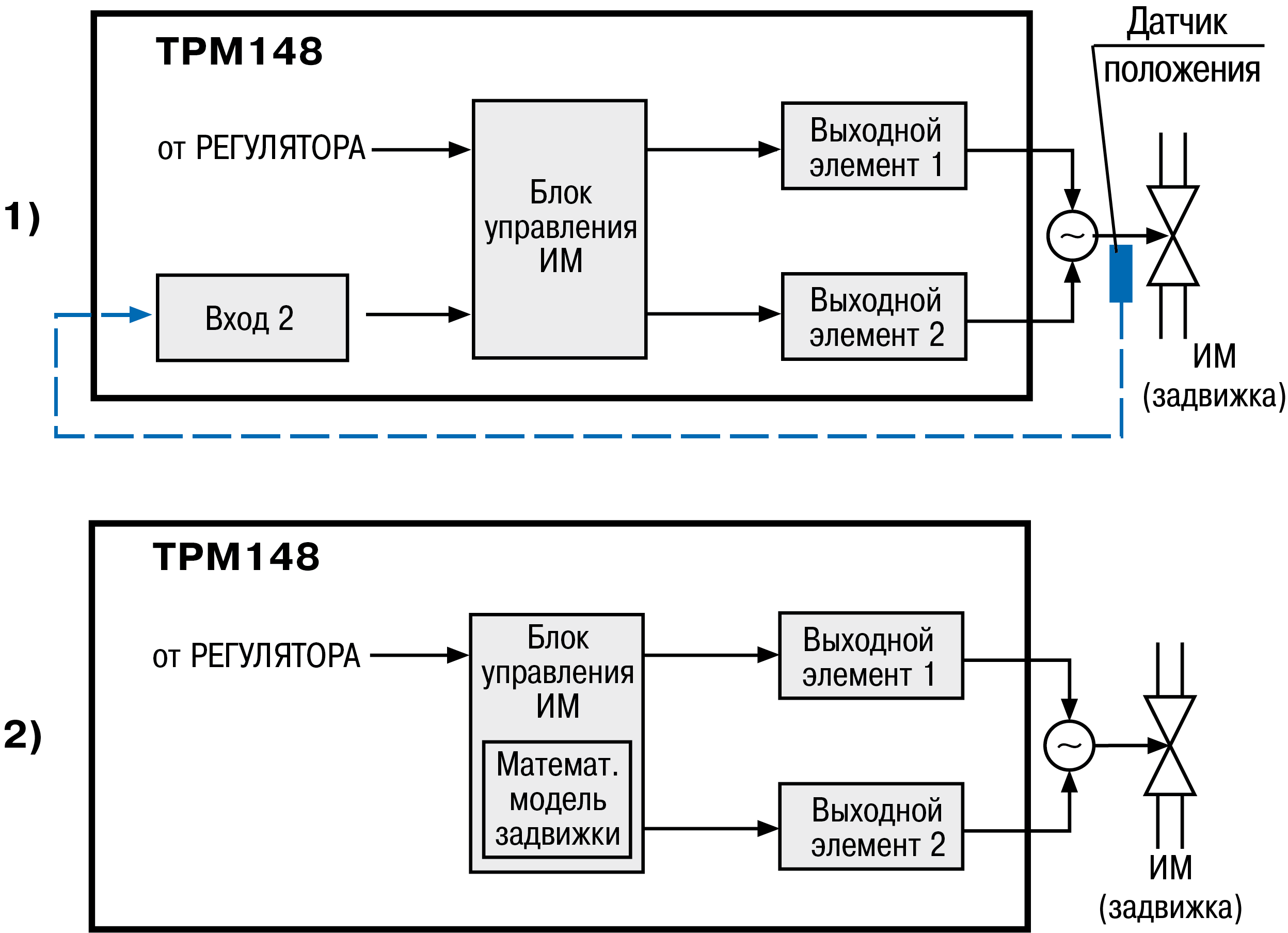
Прибор работает с датчиками положения ИМ двух типов: резистивными или токовыми.
Датчик положения ИМ подключается к входу прибора.
Источник данных о положении ИМ задается параметром t.DP, номер входа – параметром i.DP.
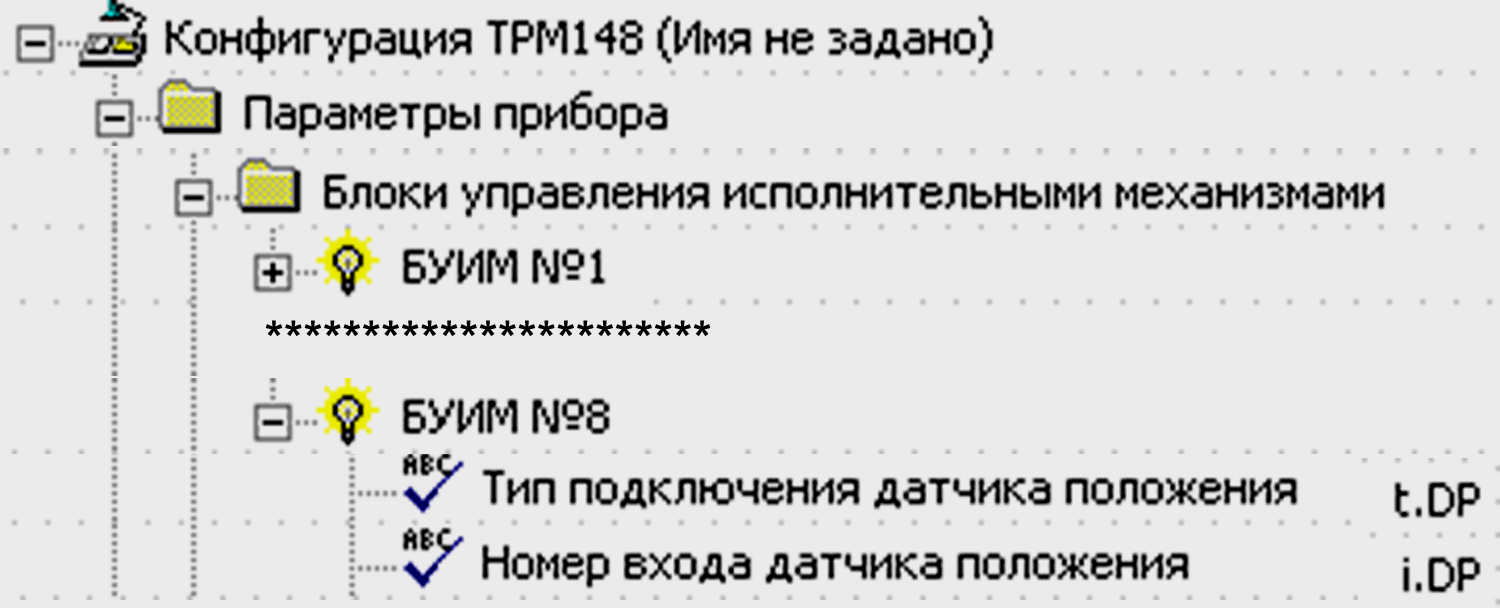
Работа без датчика положения ИМ проиллюстрирована на рисунке, (2).
Положение ИМ вычисляется по математической модели. Для того чтобы математическая модель в большей степени соответствовала реальности, следует как можно точнее задать параметры реального ИМ:
полное время хода ИМ (параметр tP.H);
начальное положение ИМ (параметр LSP);
время выборки люфта (параметр tFP).
Прибор по этим данным вычисляет текущее положение задвижки в любой момент времени.
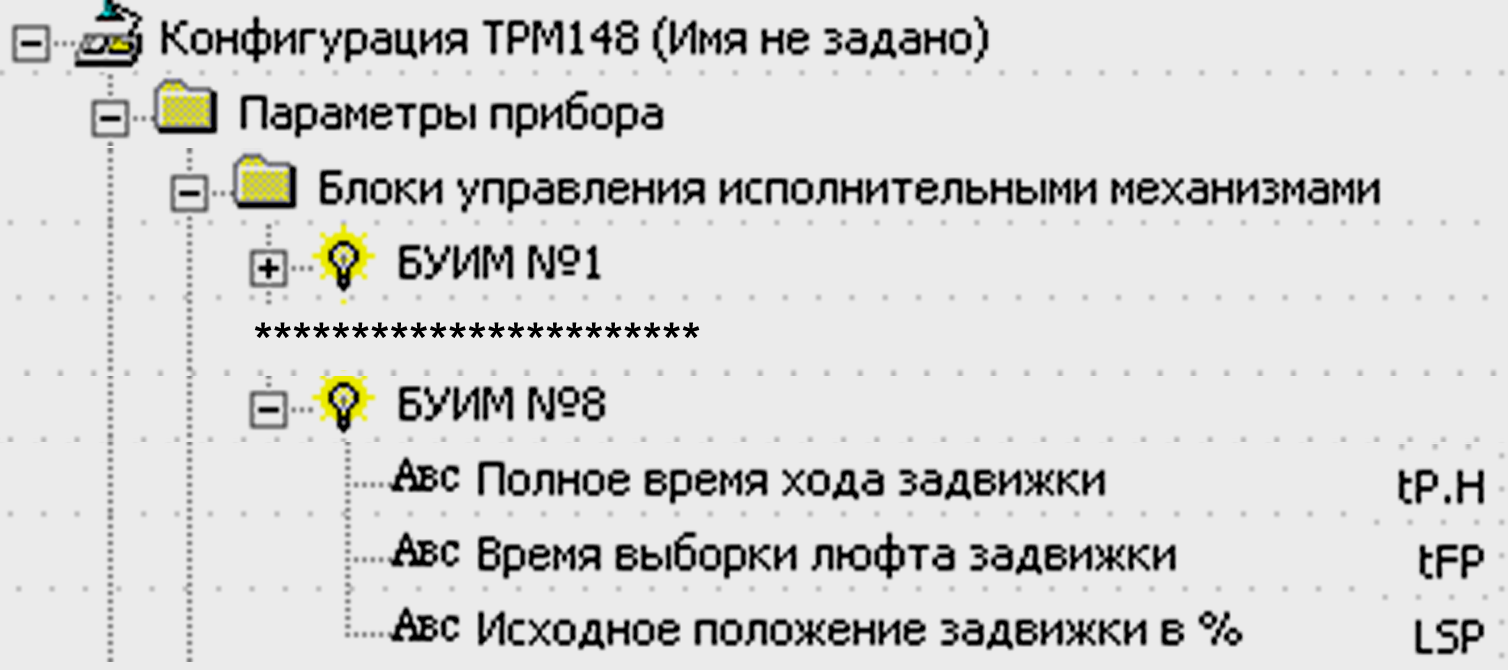
Следует учитывать, что управление задвижкой без датчика положения менее точно и приводит к накоплению ошибки.
Системы ИМ
Прибор может управлять системами из нескольких ИМ. Системой исполнительных механизмов называется группа ИМ, которая управляется одним сигналом от одного Регулятора. Для управления системой ИМ требуется один Преобразователь Сигнала и два или более БУИМ.
Примеры систем ИМ, которыми может управлять прибор:
система из максимум восьми «нагревателей»;
система из максимум восьми «холодильников»;
системы «нагреватель – холодильник»;
система управления трехпозиционными ИМ (задвижками);
система из двух— и трехпозиционных механизмов в различных комбинациях.
Всего в приборе можно организовать до 8 систем ИМ, что соответствует числу ПС в приборе.
Для управления системой ИМ к ПС следует подключить столько БУИМ, сколькими ИМ следует управлять в системе. При подключении БУИМ к ПС следует учитывать тип ИМ («нагреватель» или «холодильник»). Количества «холодильников» и «нагревателей» задаются параметром nPC, соответственно в папках параметров «БУИМ типа «нагреватель» и БУИМ типа «холодильник».
Задание диапазонов выходного сигнала при управлении системами ИМ
При управлении системами ИМ с помощью нескольких БУИМ для каждого из БУИМ задаются свои пороги. Диапазон сигнала от Регулятора (от –1 до +1) делят на несколько поддиапазонов, соответствующих количеству ИМ. БУИМ анализирует прошедший через ПС сигнал и, при попадании его в назначенный диапазон, включает ИМ.
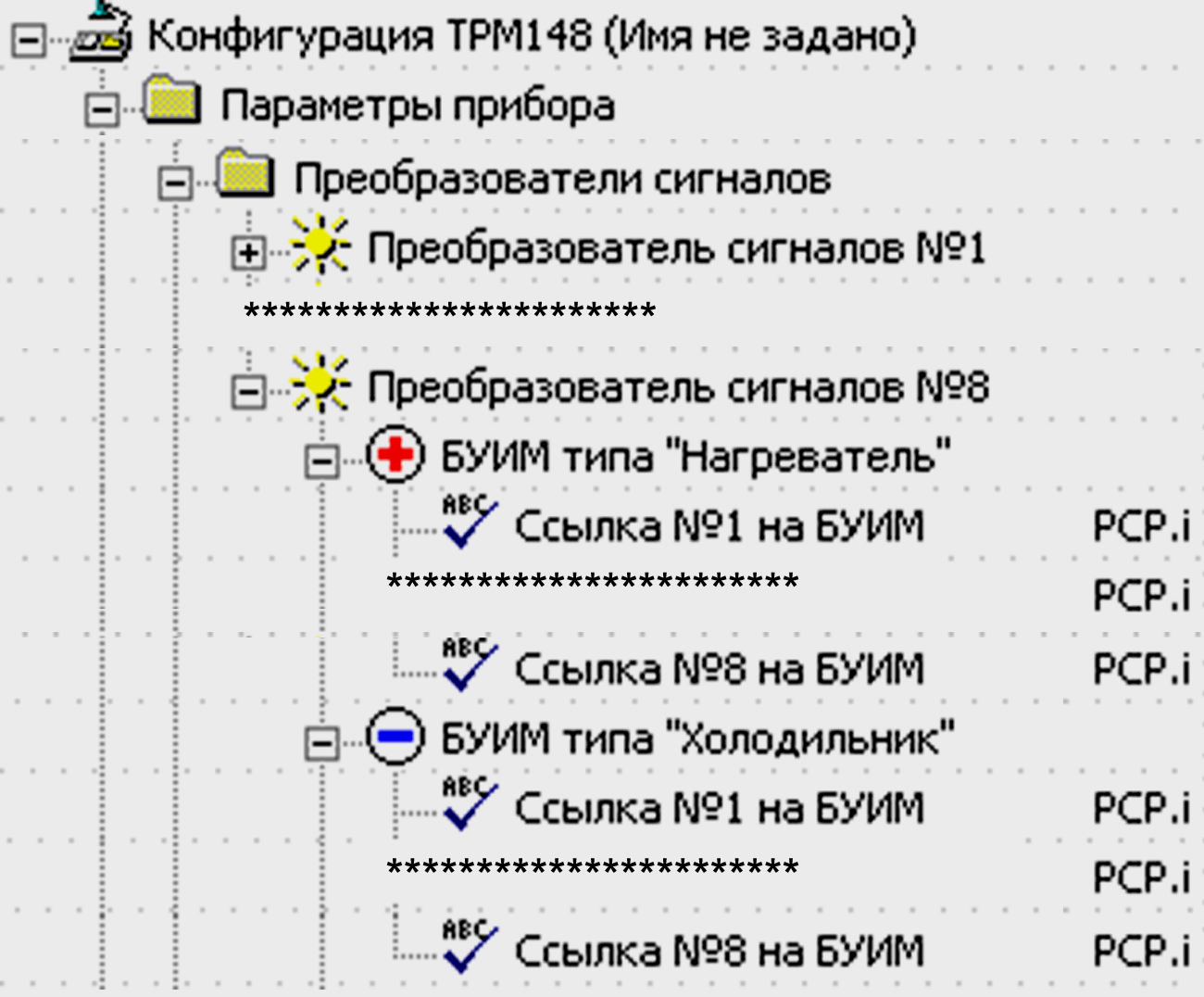
При нахождении сигнала вне диапазона (ниже нижнего значения), назначенного для конкретного ИМ, этот ИМ не функционирует. Как только сигнал попадает в заданный диапазон, БУИМ реагирует и конкретный ИМ начинает функционировать. При нахождении значения сигнала в рамках диапазона, ИМ работает с неполной мощностью. Чем ближе значение входного сигнала к верхней границе диапазона, тем выше мощность ИМ, и, соответственно, чем ближе значение входного сигнал к нижней границе, тем ниже мощность ИМ. При переходе значения выходного сигнала в диапазон последующего ИМ Исполнительный механизм выходит на стопроцентную мощность. При переходе значения выходного сигнала в диапазон предыдущего ИМ Исполнительный механизм прекращает работать.
На рисунке представлен график работы ИМ (тип «нагреватель») в заданном диапазоне.
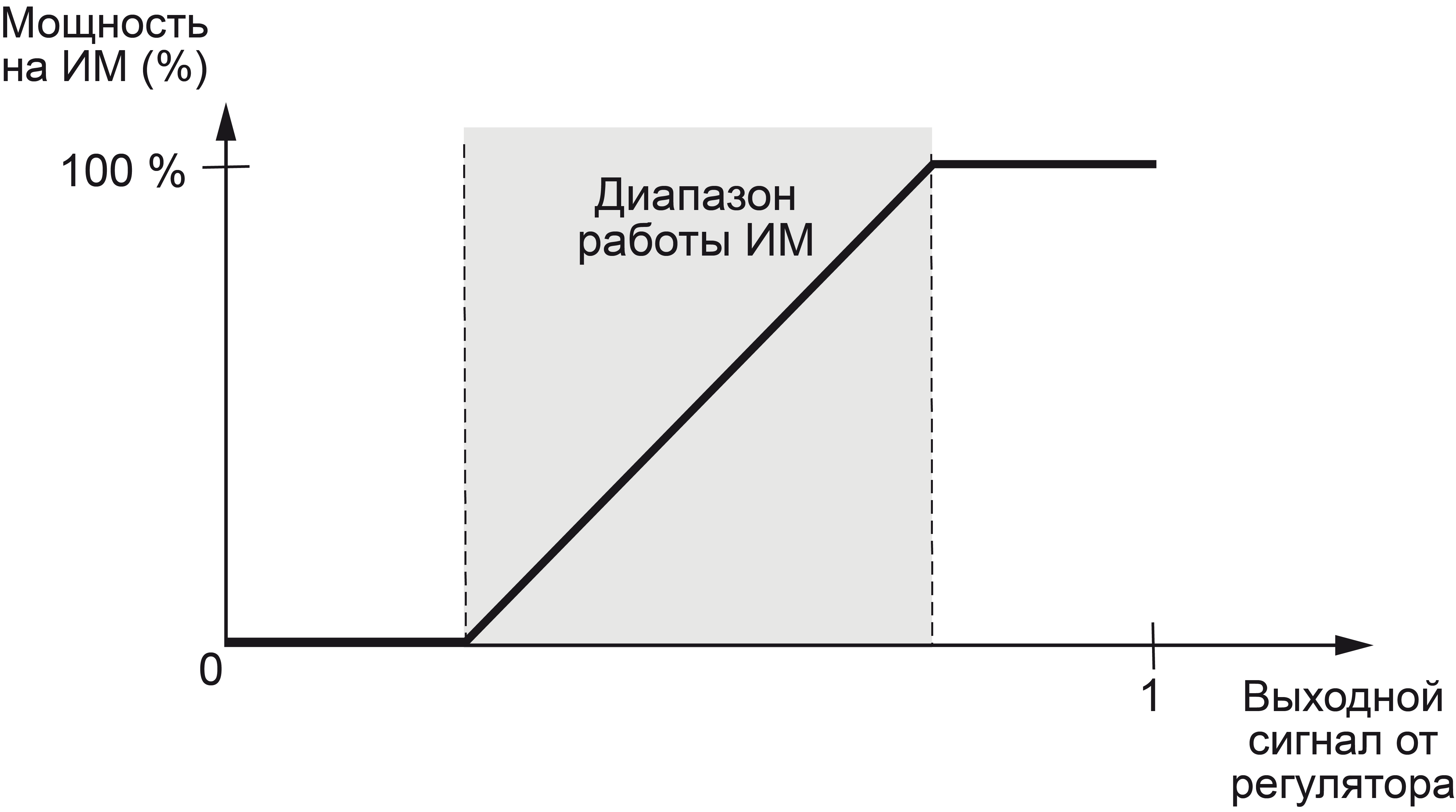
Для каждого БУИМ задается только нижний порог – минимальное значение выходного сигнала Регулятора, которое включает ИМ, соответствующий данному БУИМ. Нижний порог задается параметром PCP.
Верхний порог не задается ввиду следующего:
верхний порог предыдущего БУИМ всегда соответствует нижнему порогу последующего БУИМ;
верхний порог последнего БУИМ типа «нагреватель» всегда равен +1;
верхний порог (определяется по модулю) последнего БУИМ типа «холодильник» всегда равен –1.
Ниже представлены два примера управления системами ИМ с помощью нескольких БУИМ.
Пример
Для обогрева большого складского помещения используются 4 ТЭН мощностью 10 кВт каждый. В зависимости от сигнала с регулятора температуры прибор должен поочередно включать ТЭН, чтобы достичь суммарной мощности в 40 кВт.
Система функционирует следующим образом.
К одному ПС подключают 4 БУИМ, каждый из которых управляет одним ТЭН. Сигнал от регулятора изменяется в диапазоне от 0 до 1, его следует разбить на 4 диапазона для четырех ТЭН.
В параметре PCP БУИМ № 1 указывают значение 0,00, БУИМ № 2 – 0,25, БУИМ № 3 – 0,50 и БУИМ № 4 – 0,75 (см. рисунок).
Теперь весь диапазон сигнала от 0 до 1 разделен на 4 равных поддиапазона, и каждый ИМ будет работать в своем поддиапазоне. При таком способе управления ИМ обеспечивается плавный рост суммарной мощности системы без перенагрузки коммутационных элементов системы управления (реле или пускателей).
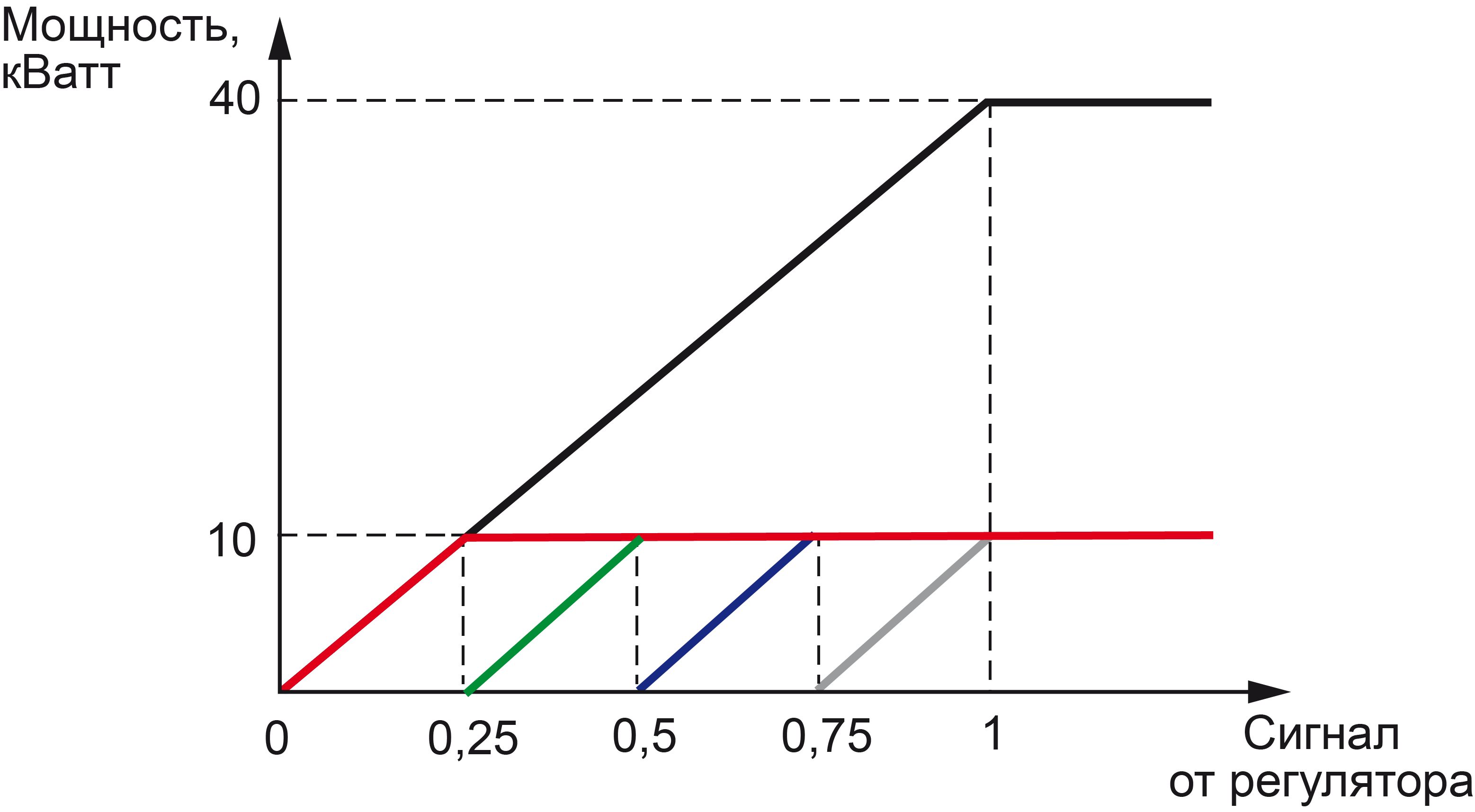
Пример
Управление системой «нагреватель – холодильник»
Для поддержания температуры прибор может использовать одновременно ТЭН и охладитель.Диапазон выходного сигнала Регулятора распределяется для двух БУИМ: один БУИМ типа «нагреватель» и один БУИМ типа «холодильник» (см. рисунок). Устанавливается нижний порог первого БУИМ +0,1, нижний порог второго БУИМ –0,1. При положительных значениях выходного сигнала будет работать ТЭН, а при отрицательных – охладитель.
В диапазоне выходного сигнала от –0,1 до +0,1 не будет работать ни один ИМ. Это позволит избежать частых переключений между «нагревателем» и «холодильником» при работе в диапазоне выходного сигнала Регулятора, близком к нулю
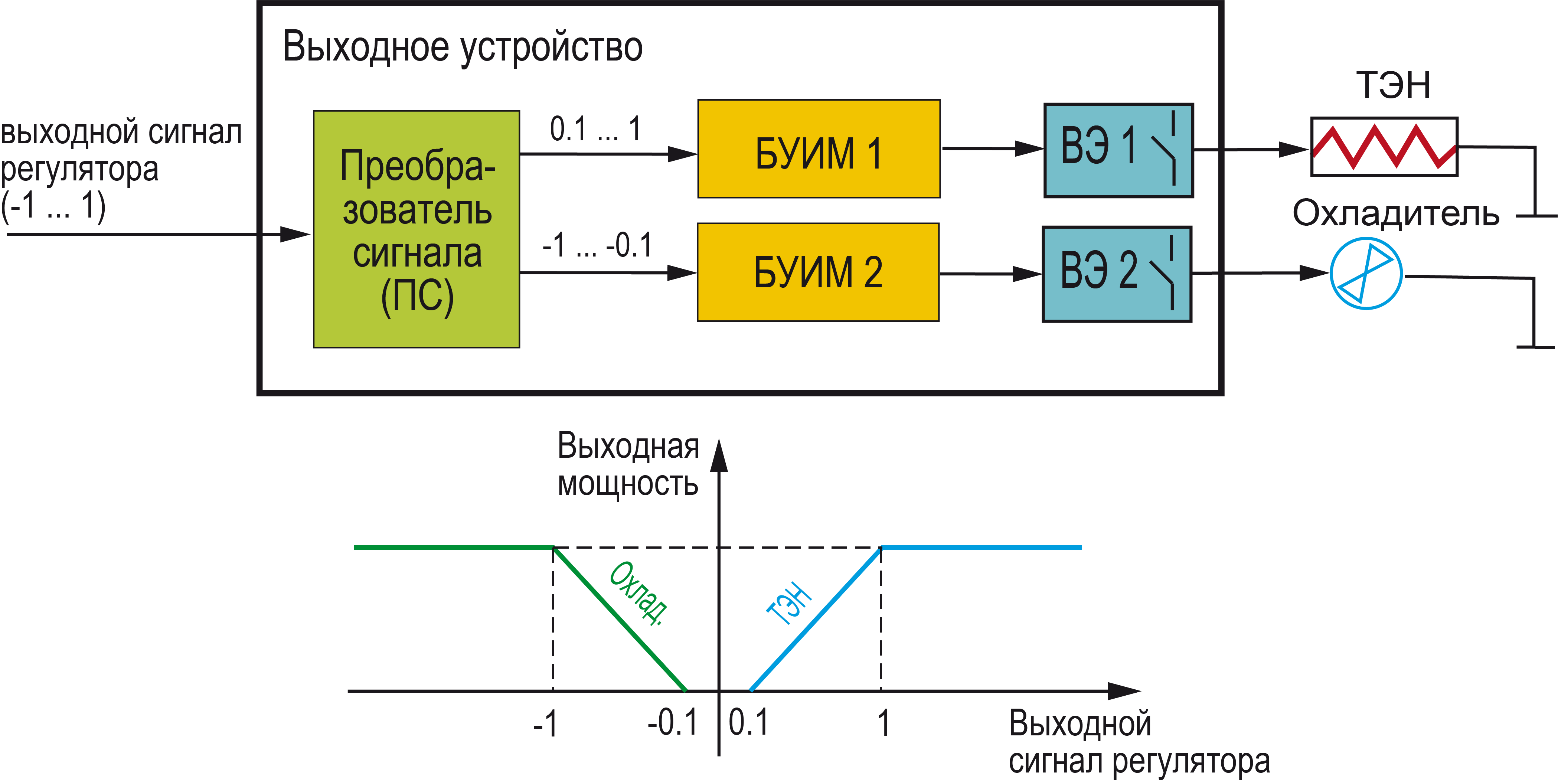
На рисунке представлены блок-схема выходного устройства и график изменения выходной мощности в зависимости от изменения выходного сигнала Регулятора в варианте управления Объектом с помощью системы «нагреватель – холодильник».
Управление Объектами с нелинейной характеристикой с помощью БУИМ
С помощью прибора возможно регулирование параметров Объектов, имеющих нелинейную характеристику. Примерами таких Объектов являются трубопровод с утечкой или печь с поврежденной теплоизоляцией.
Нелинейная характеристика может быть представлена кусочно-линейной функцией (ломаной линией), состоящей из максимально восемь(по количеству БУИМ) участков, каждый из которых имеет свой угол наклона.
Примеры такой аппроксимации представлены на рисунке, где приведены варианты использования двух БУИМ, с двумя участками регулирования и разным наклоном.
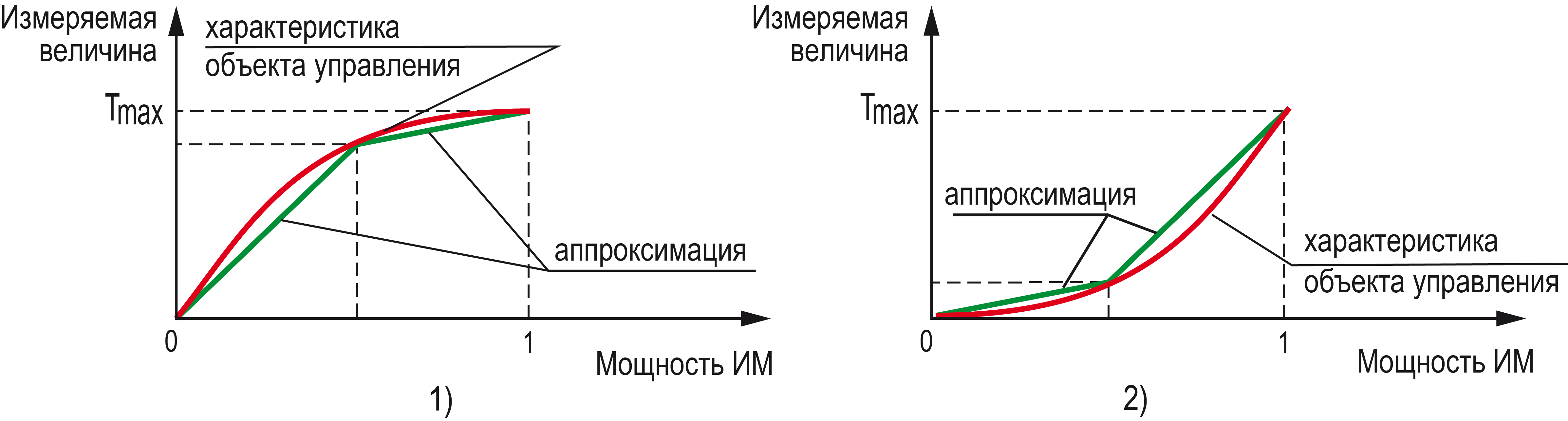
Объектами с нелинейными характеристиками можно управлять с помощью созданной в ТРМ148 системы ИМ. Каждому БУИМ, входящему в систему, соответствует свой участок, а точка перегиба задается нижним порогом последующего БУИМ.
Управление в соответствии с кусочно-линейной характеристикой эффективно повышает устойчивость системы управления, уменьшая перерегулирование переходных процессов.
Пример
Управление Объектом (печью) с нелинейной характеристикой с помощью двухступенчатого «нагревателя»
Имеется печь, в которой повреждена теплоизоляция. Это Объект с нелинейной характеристикой вида, приведенного на рисунке. Для поддержания в этой печи температуры до 50 °С требуется ТЭН мощностью 20 кВт. Для поддержания температуры выше 50 °С с учетом возросших утечек тепла требуется дополнительно подключать еще один ТЭН, но уже мощностью 10 кВт. Для решения этой задачи выходной сигнал Регулятора разбивается на два положительных БУИМ (см. рисунок). Нижний порог первого БУИМ устанавливается равным 0. Нижний порог PCP второго БУИМ соответствует точке перегиба (например, 0,65). Тогда при значениях выходного сигнала от 0 до PCP будет работать только первый ТЭН, а при значениях от PCP до 1 включатся оба ТЭН.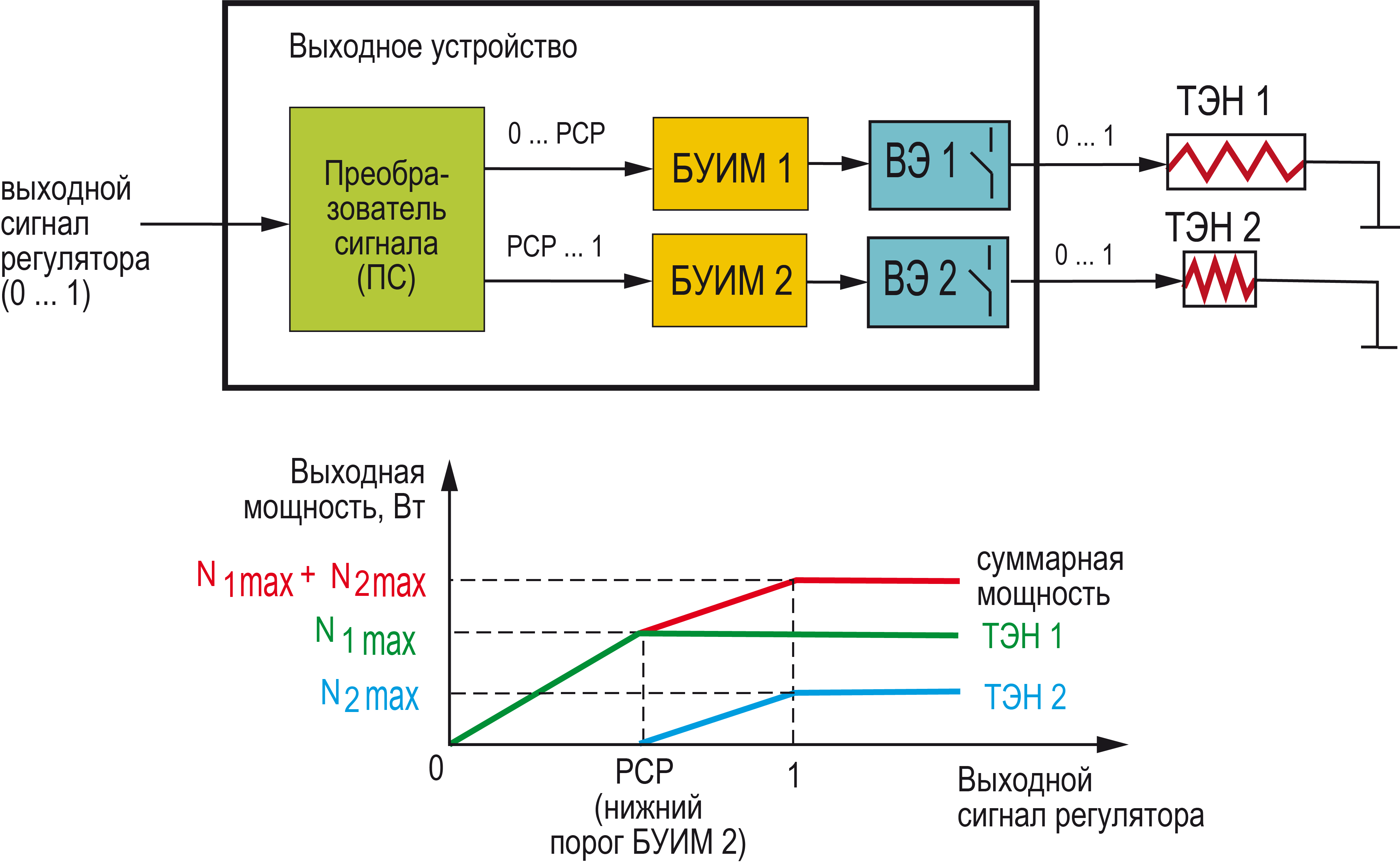
На рисунке представлены блок-схема выходного устройства и график изменения выходной мощности в зависимости от изменения мощности сигнала Регулятора в варианте управления Объектом с нелинейной характеристикой с помощью двухступенчатого «нагревателя».
Выходные элементы
Прибор имеет 8 встроенных ВЭ, каждый из которых программно привязан к соответствующему БУИМ, Инспектору, Регистратору или реле аварии.
Выходной элемент может быть двух типов:
дискретный (электромагнитное реле, транзисторная или симисторная оптопара, выход для управления твердотельным реле );
аналоговый (ЦАП «параметр – ток 4...20 мА» или «параметр – напряжение 0...10 В).
Использование дискретных ВЭ при ПИД-регулировании
При выборе Режима работы регулятора ПИД-регулятор, дискретный ВЭ будет работать в режиме ШИМ. Следует задать период следования ШИМ-импульсов (параметр tHP) и минимальную длительность импульса (параметр t.L), при которой еще производится включение ВЭ (см. рисунок).
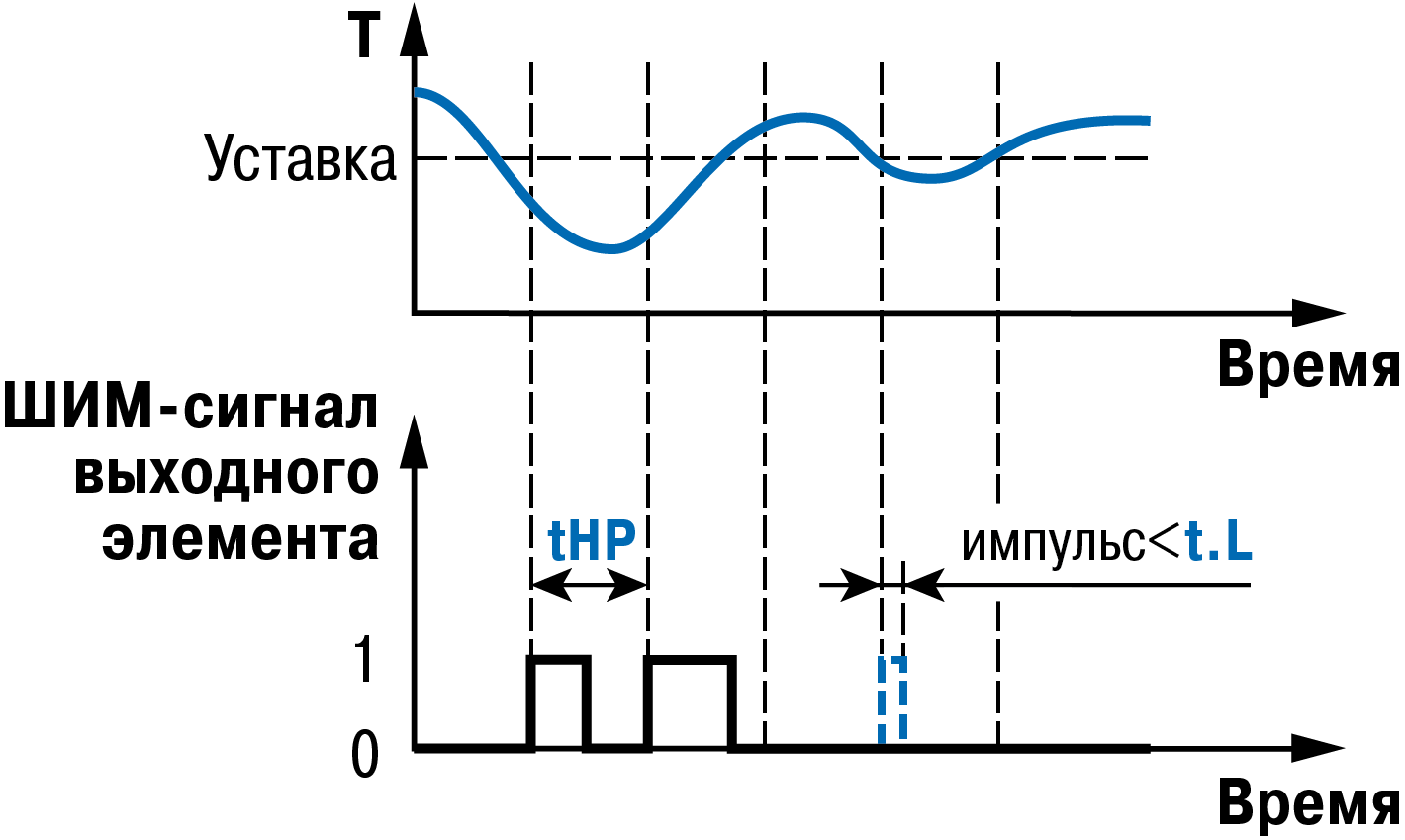
Чем выше частота управляющих импульсов (т. е. меньше период tHP), тем точнее реакция Регулятора на внешние изменения.
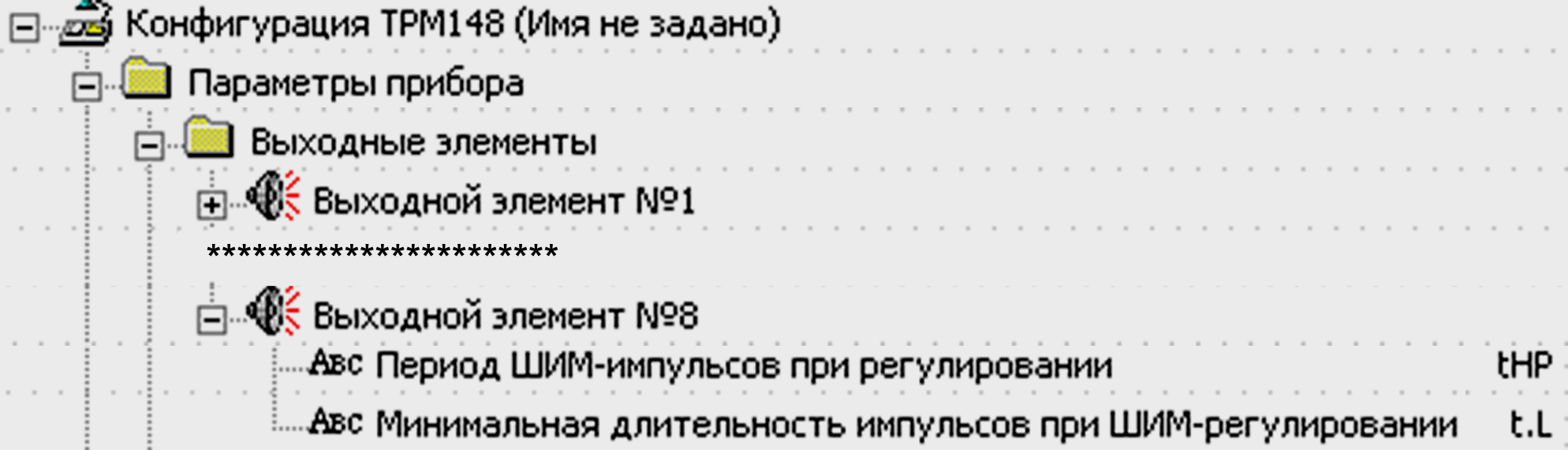
Если ВЭ – транзисторная или симисторная оптопара, то период следования импульсов можно установить равным 1 с. Если ВЭ – э/м реле, то слишком малое значение периода tHP приведет к частым переключениям и быстрому износу силовых контактов. Поэтому следует задать большее значение параметра tHP, но следует понимать, что это может ухудшить качество регулирования.
Задание минимальной допускаемой длительности импульса t.L также следует для предотвращения износа силовых контактов ВЭ вследствие слишком кратковременных включений.
Инспектор
Инспектор – программный модуль, контролирующий нахождение регулируемой величины в допустимых границах. Выход Инспектора может быть подключен:
к логике принятия решения об аварии и тогда он будет выдавать сигнал об аварии
;непосредственно к ВЭ, обеспечивающему изменение контролируемой величины
.
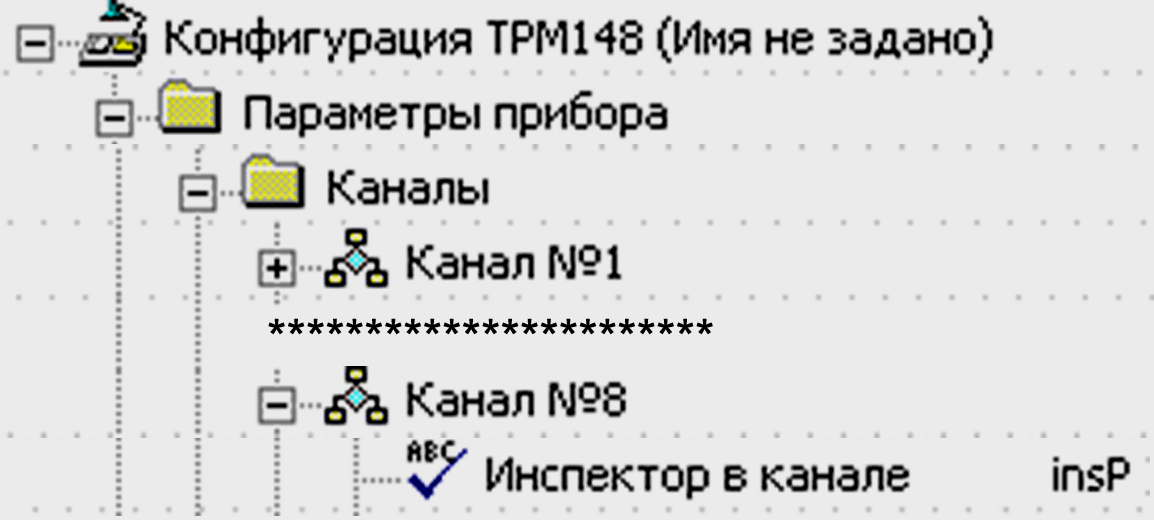
В варианте конфигурации прибора, в котором к инспектору не подключен выходной элемент (параметр rel.a в каждом инспекторе указывает на подключение или отключение ВЭ от инспектора), при срабатывании Инспектора формируется сигнал на перевод объекта в состояние АВАРИЯ в соответствии с логикой принятия решения об аварии.
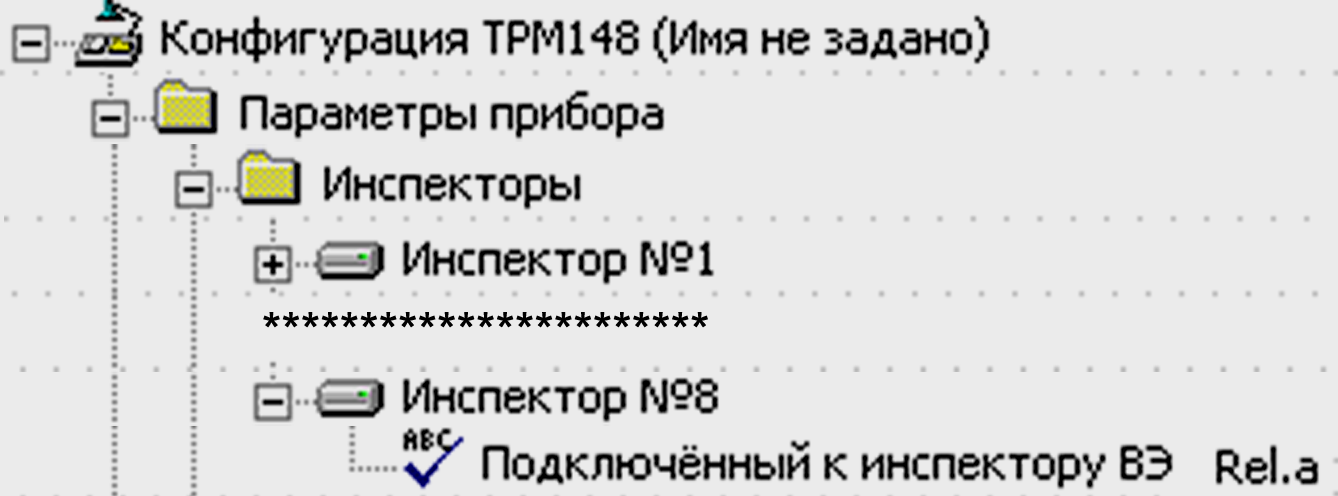
Во втором случае (при подключении Инспектора к ВЭ) сигнал аварии не формируется.
Включение Инспектора задается параметром inSP.
Для Инспектора задаются следующие параметры для каждого объекта:
пороги срабатывания Инспектора и способ их отсчета;
тип логики срабатывания Инспектора;
использование Инспектора в каждом состоянии;
блокировки срабатывания при определенных условиях;
задержки срабатывания.
Отключение Инспектора
Инспектор можно отключить:
для всего объекта, установив значение параметра inSP «Выключен»;
при каждом состоянии, задав параметр e.use.
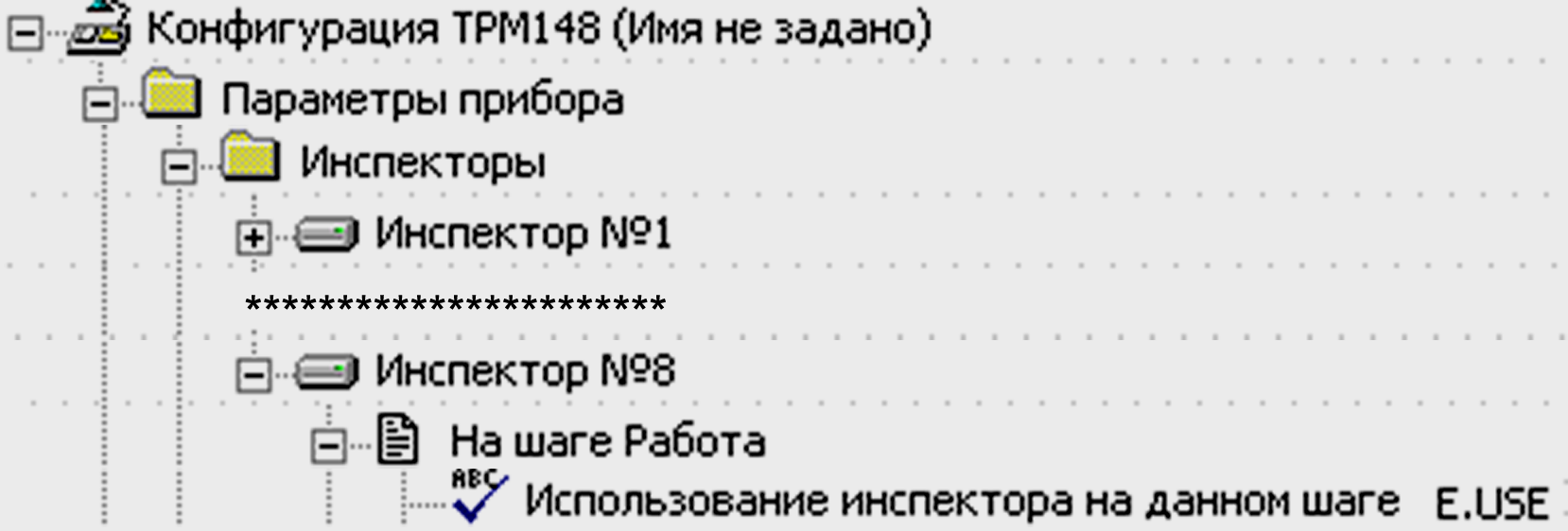
Блок Логики принятия решения об аварии
Если к инспектору не подключен ВЭ, то все сигналы от инспекторов одного объекта собираются в блок логики принятия решения об аварии. Этот модуль производит логическую операцию «И» или логическую операцию «ИЛИ» со всеми поступающими сигналами от инспекторов в него входящих. На выходе этот блок логики выдает сигнал об аварии объекта.
Наглядно работа блока логики принятия решения об аварии изображена на рисунке.

Для перехода Объекта в аварийное состояние:
объединение по схеме «И» требует срабатывания всех Инспекторов.
ВниманиеАварийный сигнал подается только в том случае, если сработали все инспекторы в подключенных каналах и у всех инспекторов rel.a = OFF.объединение по схеме «ИЛИ» требует срабатывания хотя бы одного любого подключенного Инспектора из инспекторов во включенных каналах.
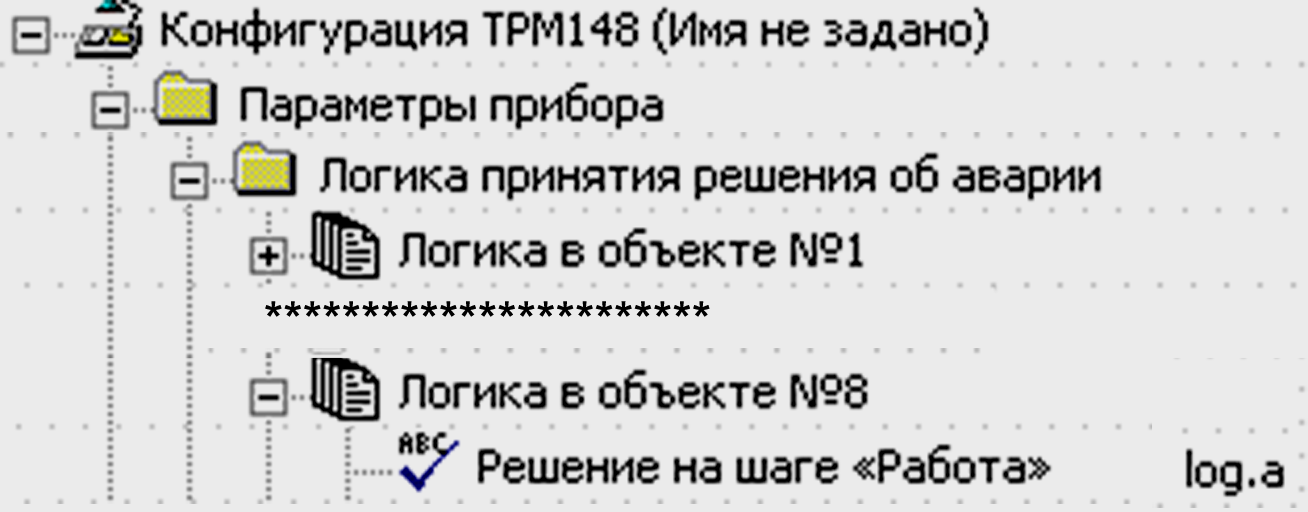
Логика принятия решения («И» или «ИЛИ») задается параметром log.a для любого из состояний каждого объекта.
Пороги срабатывания Инспектора и способы их отсчета
Пороги срабатывания Инспектора определяют допустимый диапазон регулируемой величины. Количество задаваемых порогов (один или два) зависит от типа логики срабатывания Инспектора.
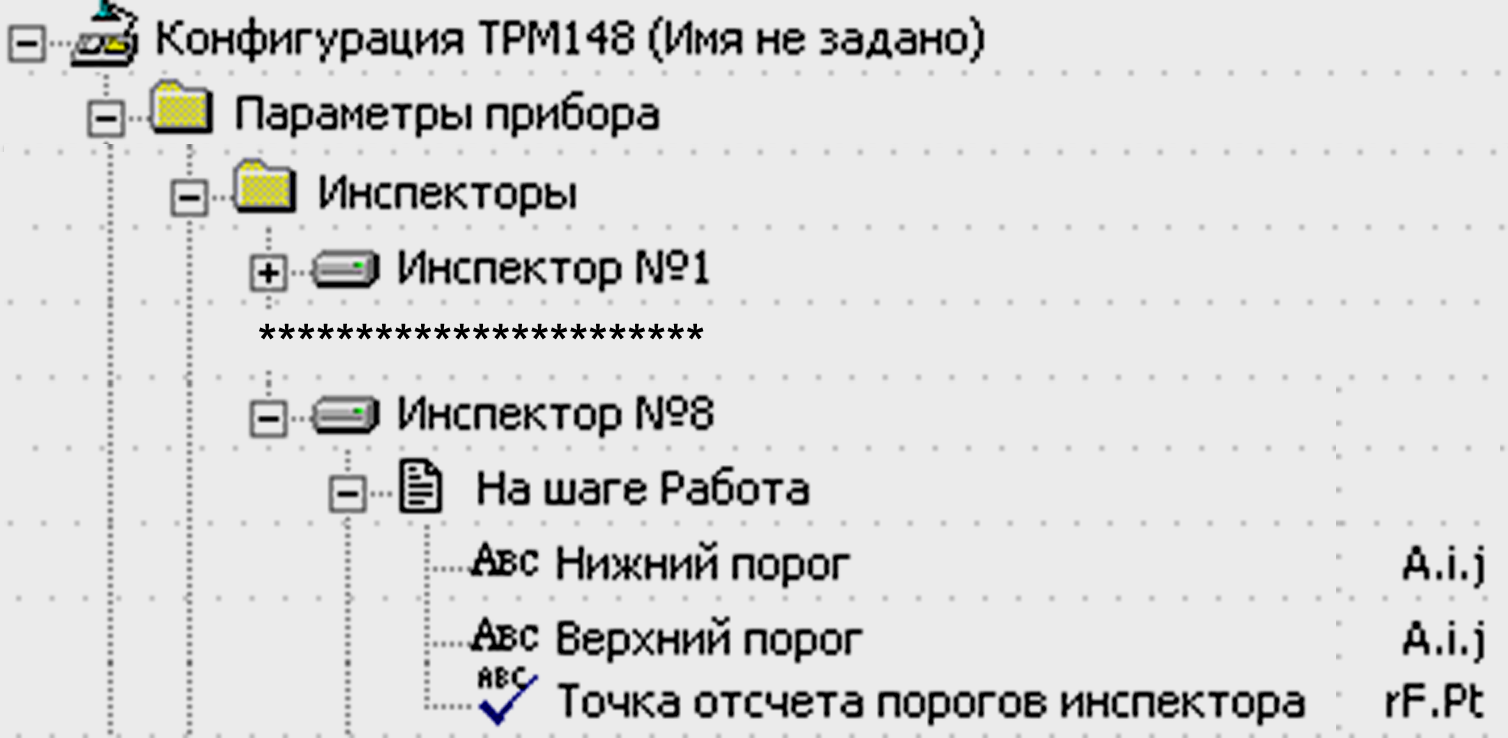
Пороги задаются параметром A.i.j в единицах регулируемой величины. Необходимо также задать способ отсчета порогов параметром rF.Pt. Пороги могут быть двух типов:
абсолютные (за 0 принят 0 физической величины (более точно – 0 на выходе вычислителя в канале));
относительные (за 0 принято текущее значение уставки).
При задании относительных порогов прибор пересчитывает их значения относительно текущего значения Уставки Регулятора.
Логика срабатывания Инспектора
В приборе имеется возможность в каждом объекте выбрать логику срабатывания Инспектора.
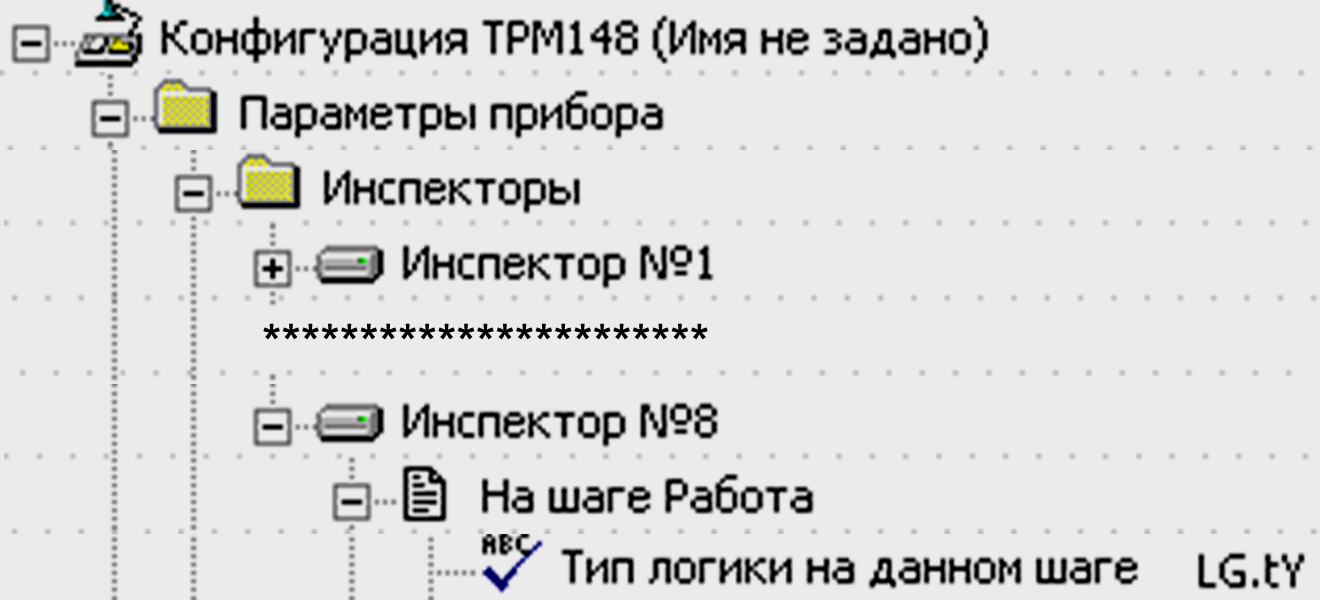
Возможны 4 варианта логики срабатывания Инспектора:
если регулируемая величина становится выше порога (прямая логика);
если регулируемая величина становится ниже порога (обратная логика);
при выходе регулируемой величины за заданный порогами диапазон (U-образная логика);
при входе регулируемой величины в заданный порогами диапазон (П-образная логика).
Для типов логики 3 и 4 задаются два порога.
Для типов логики 1 и 2 задается только порог № 1. Затем значения порогов автоматически уравниваются.
Тип логики срабатывания Инспектора задается параметром LG.tY.
Работа Инспектора по каждому из четырех типов логики представлена на рисунках ниже.
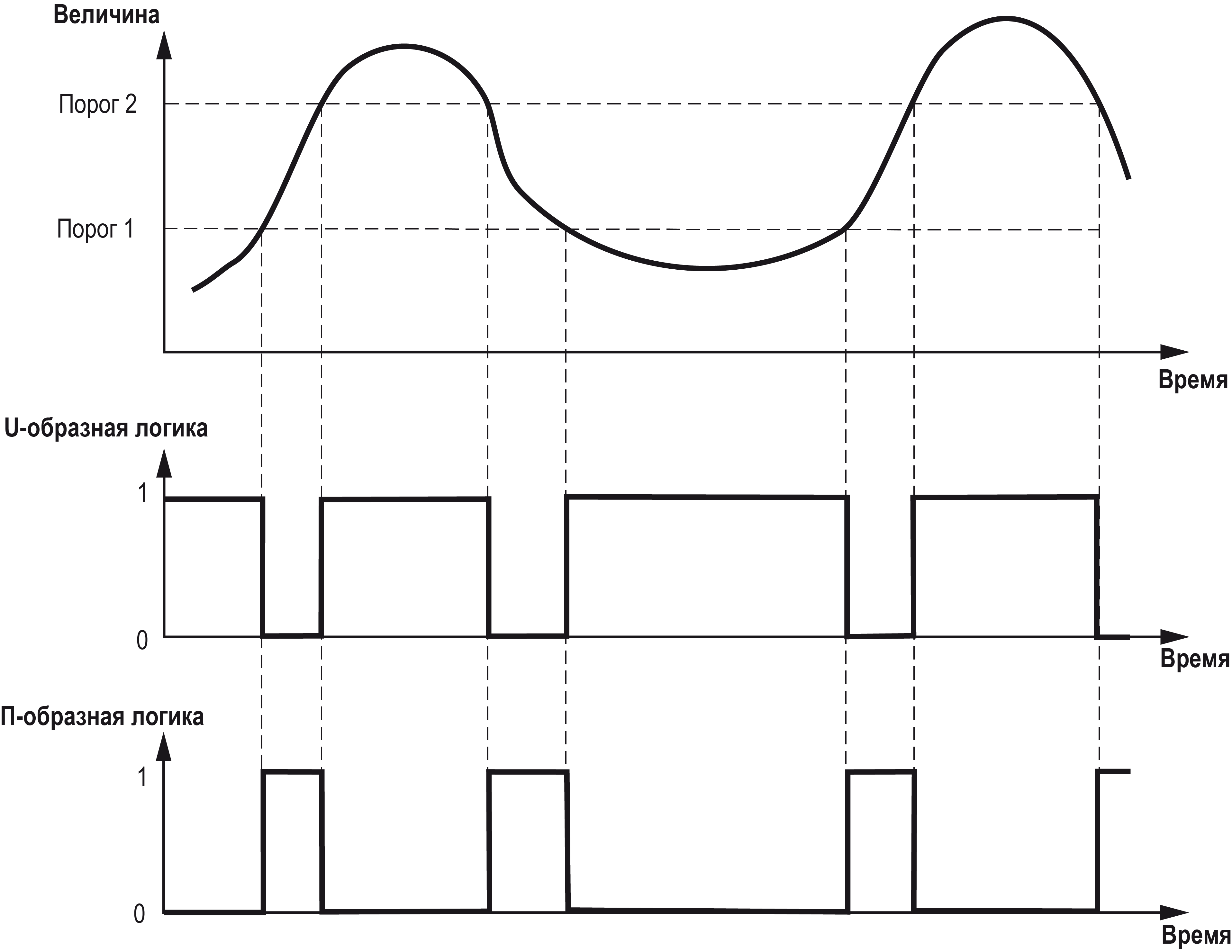
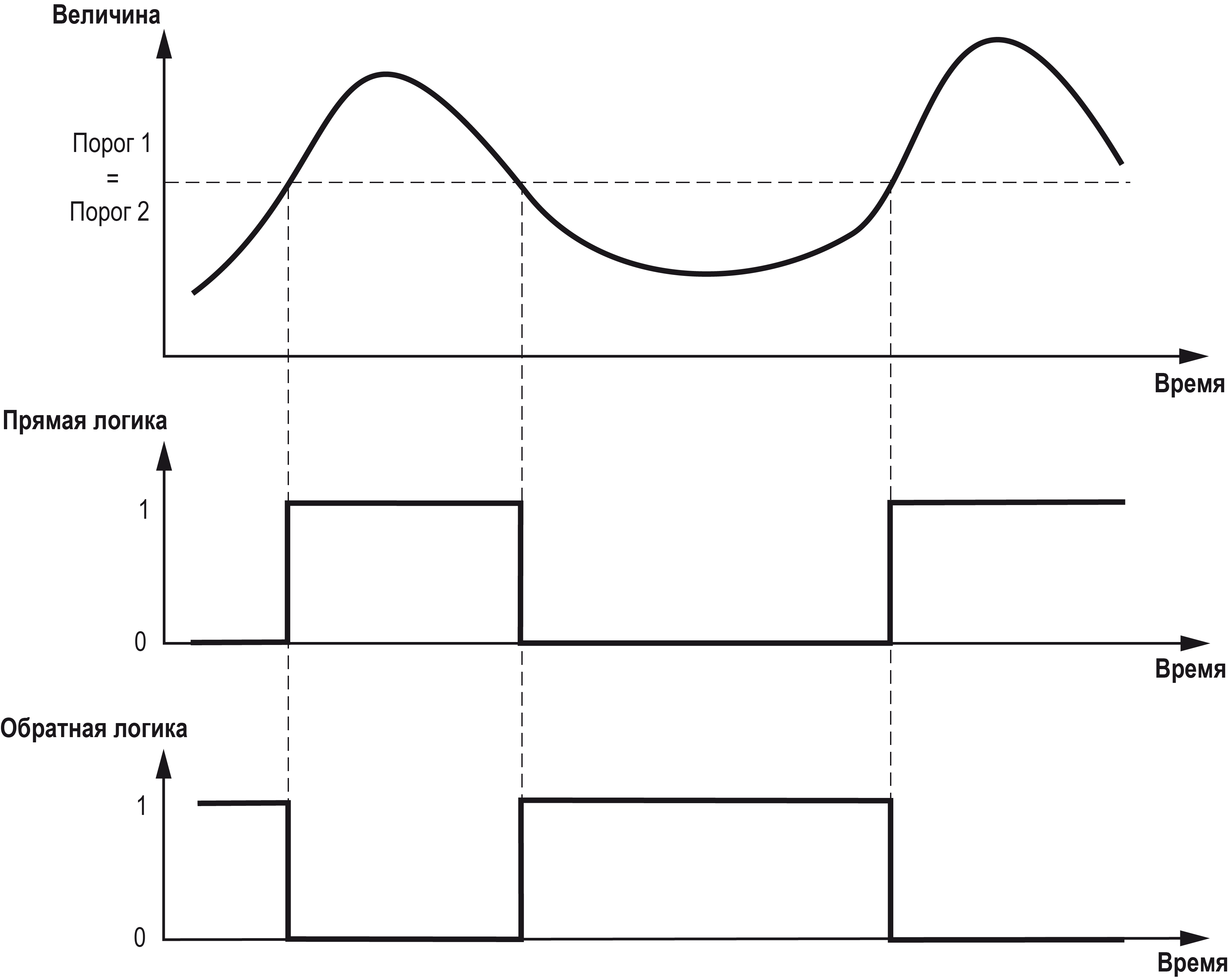
Выходом Инспектора является число +1 или 0.
При выходе, равном +1, происходит срабатывание Инспектора.
При выходе, равном 0, срабатывания Инспектора не происходит.
Блокировки и задержки срабатывания Инспектора
В приборе реализована возможность блокировки срабатывания Инспектора при определенных условиях. Существуют два типа блокировок: блокировка первого срабатывания и блокировка пиковых выбросов.
Блокировка первого срабатывания
Блокировка первого срабатывания необходима в начале технологического процесса или после восстановления пропадавшего питания. В этих случаях регулируемая величина может находиться за допустимыми пределами, – и это штатная ситуация.
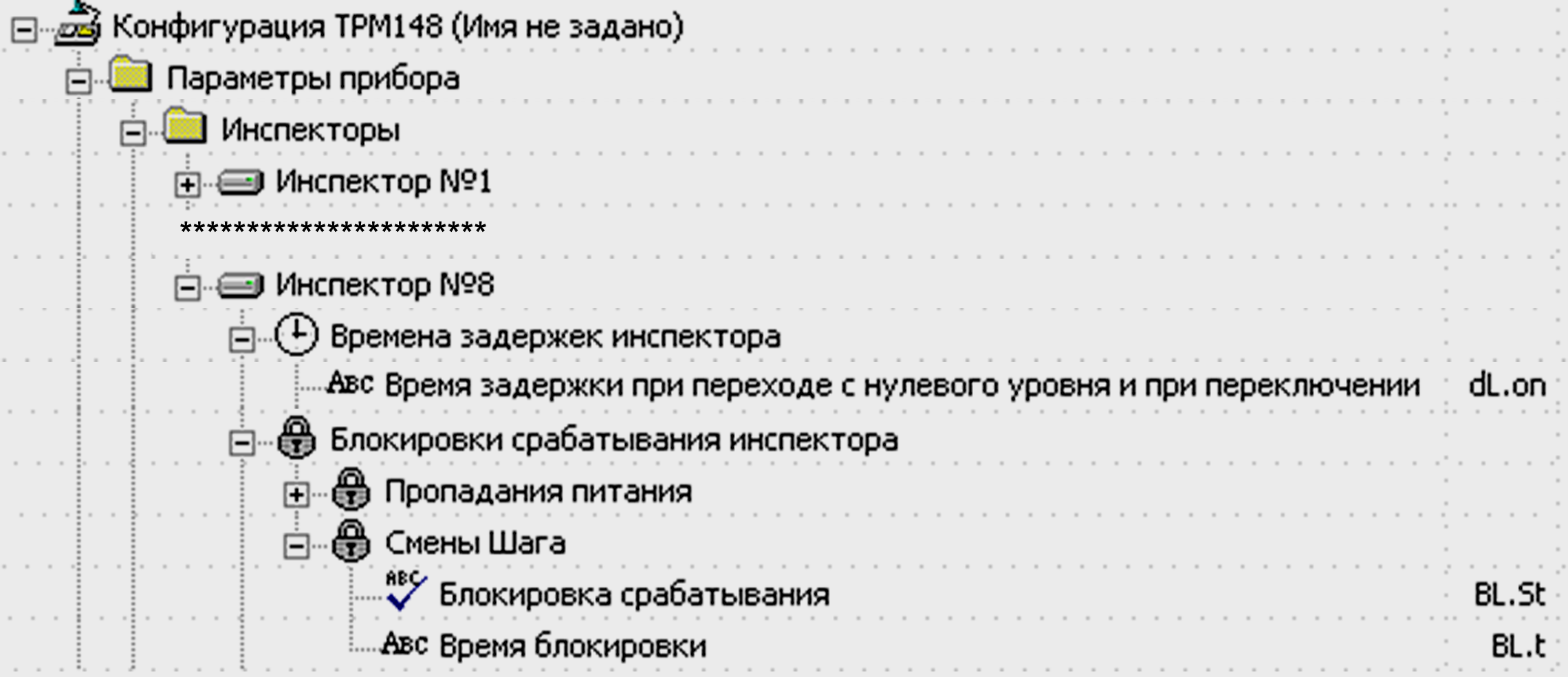
Срабатывание Инспектора следует блокировать, т. к. в противном случае произойдет переход в состояние АВАРИЯ или ложно сработает подключенный к Инспектору ВЭ.
Прибор позволяет блокировать первое срабатывание Инспектора на определенное время (параметр BL.t) или до входа в разрешенный допустимый диапазон. Также можно включить блокировку по обоим условиям (время или вход в диапазон) или отключить блокировку срабатывания.
Тип блокировки первого срабатывания Инспектора определяется параметром BL.St.
Прибор позволяет задать независимые условия блокировок срабатывания Инспектора для ситуаций начала регулирования (т. е., перехода в состояние «работа») и восстановления пропадавшего питания.
Блокировка пиковых выбросов
Блокировка пиковых выбросов регулируемой величины за допустимые пределы применима в тех случаях, когда разрешается кратковременный выход регулируемой величины за допустимые границы. Можно задать время задержки срабатывания Инспектора, и если длительность выброса меньше этого времени, произойдет блокировка срабатывания.
Время задержки срабатывания задается в параметре dEL. Пример логики работы Инспектора с U-образной логикой с блокировками изображен на рисунке ниже.
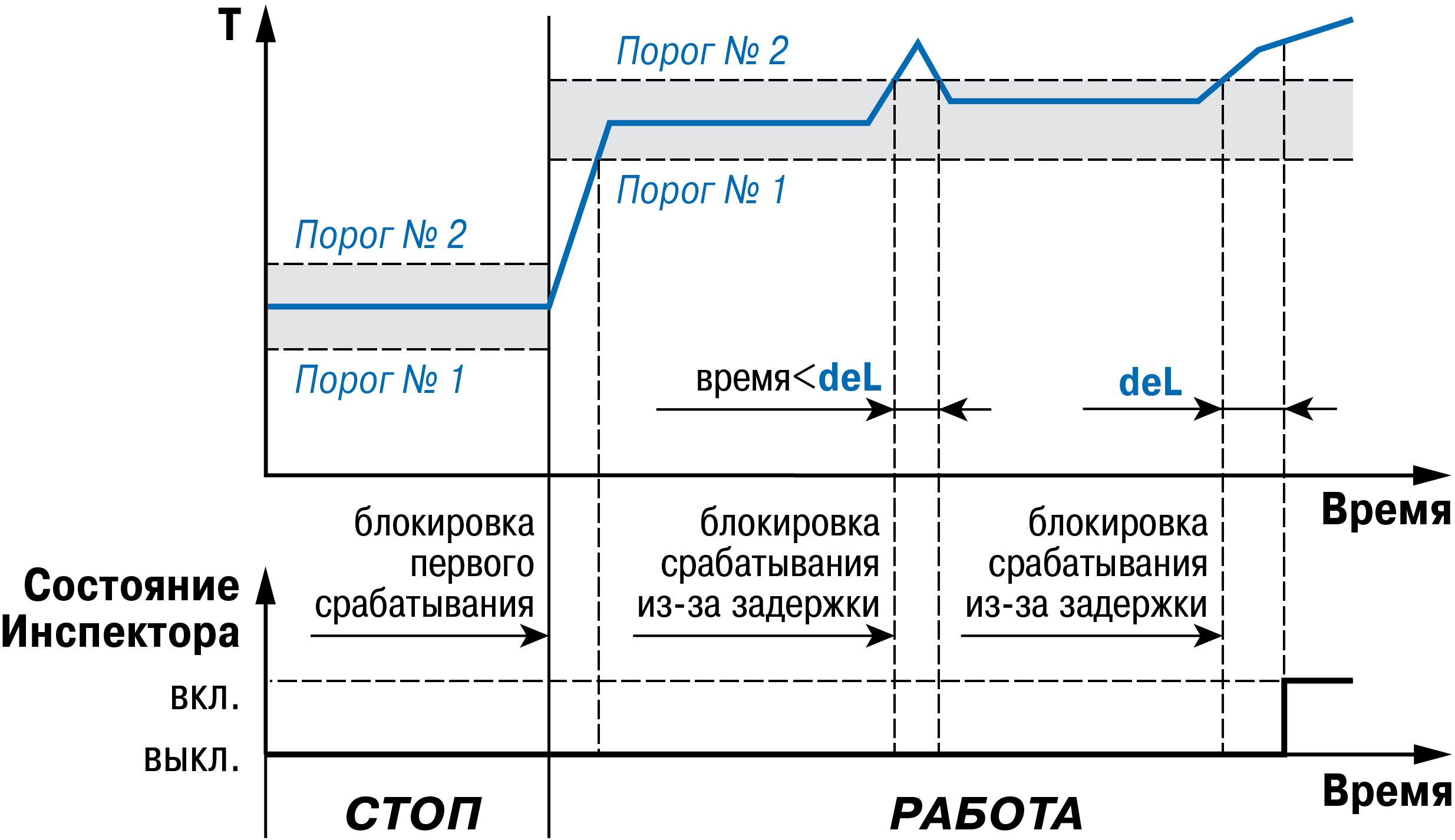
Необходимо учитывать, что в приборе имеются дополнительные параметры, отвечающие за работу инспектора (hys.c, hoLd), позволяющие задать гистерезис и время удержания инспектора при подключении к нему ВЭ.
Параметр hold используется, например, для удержания сигнального оборудования во включенном состоянии заданное время. Соответственно, для включения сирены в случае аварии минимум на 1 мин следует задать значение hold равным 1:00.
Параметр hys.c для корректной работы Инспектора должен быть обнулен.
Регистратор в составе Канала
Регистратор – программный модуль в составе канала, предназначенный для преобразования величины, пришедшей с Вычислителя того же Канала, в аналоговый сигнал, и дальнейшей передачи на ВЭ типа ЦАП.
Номер ВЭ для Регистратора устанавливается параметром OP.i. Если параметру OP.i задано значение «не задействован», Регистратор в Канале отключен.
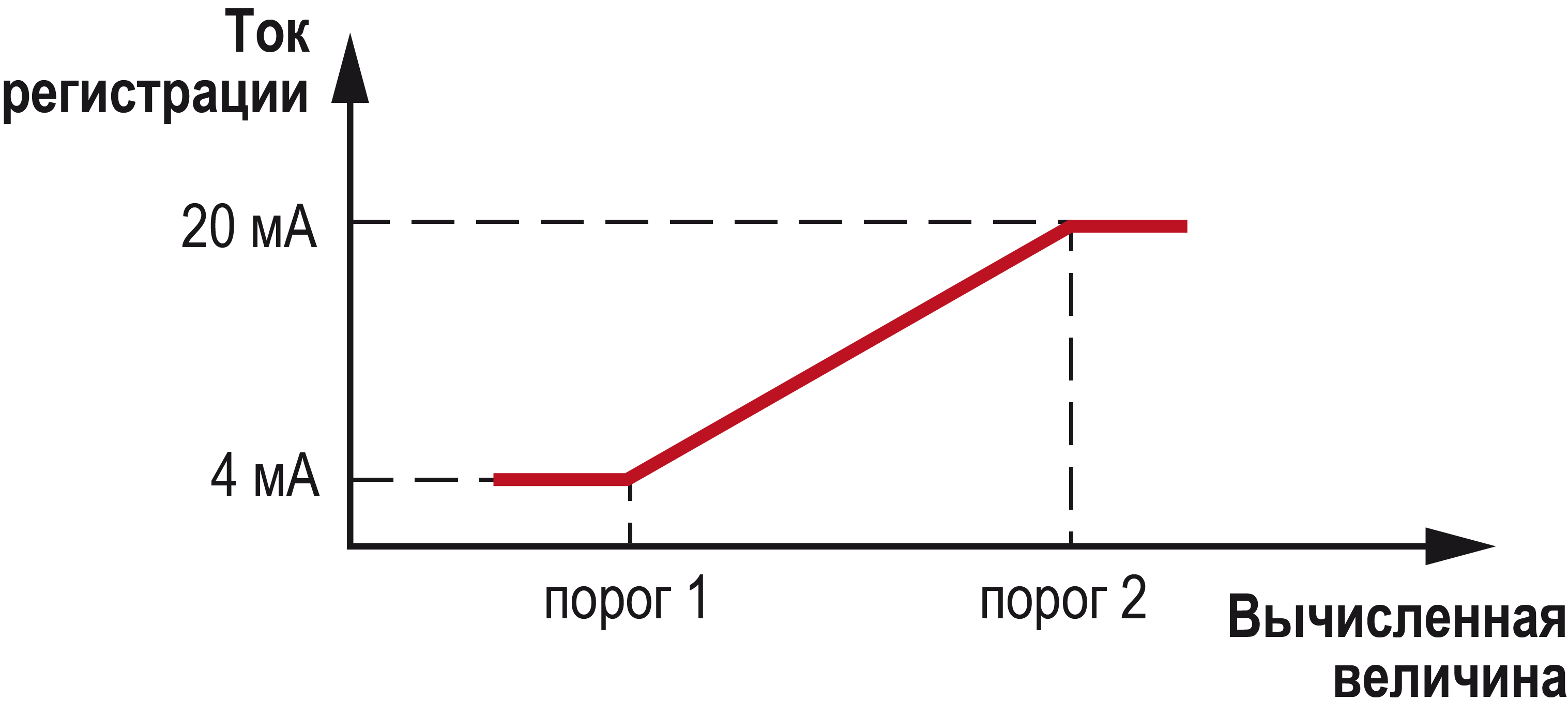
Для работы Регистратора задаются 2 пороговых значения – параметры Ao.L и Ao.H, соответствующие минимальному и максимальному выходному сигналу, соответственно. Пороговые значения задаются в той же размерности, в какой представлена вычисленная величина.
Работа Регистратора изображена на рисунке.
Сигнал с Регистратора может быть прочитан в сети RS-485 другим прибором или ПК. При передаче в сеть сигнал Регистратора приводится к диапазону 0…1.
Состояние Регистратора при аварии описывается параметром Er.St. Для передачи данных о значении с Регистратора в другой прибор или ПК используется оперативный параметр rd.rg, имеющий формат Float. Индексация оперативного параметра rd.rg схожа с индексацией параметра r.out, описанного выше.
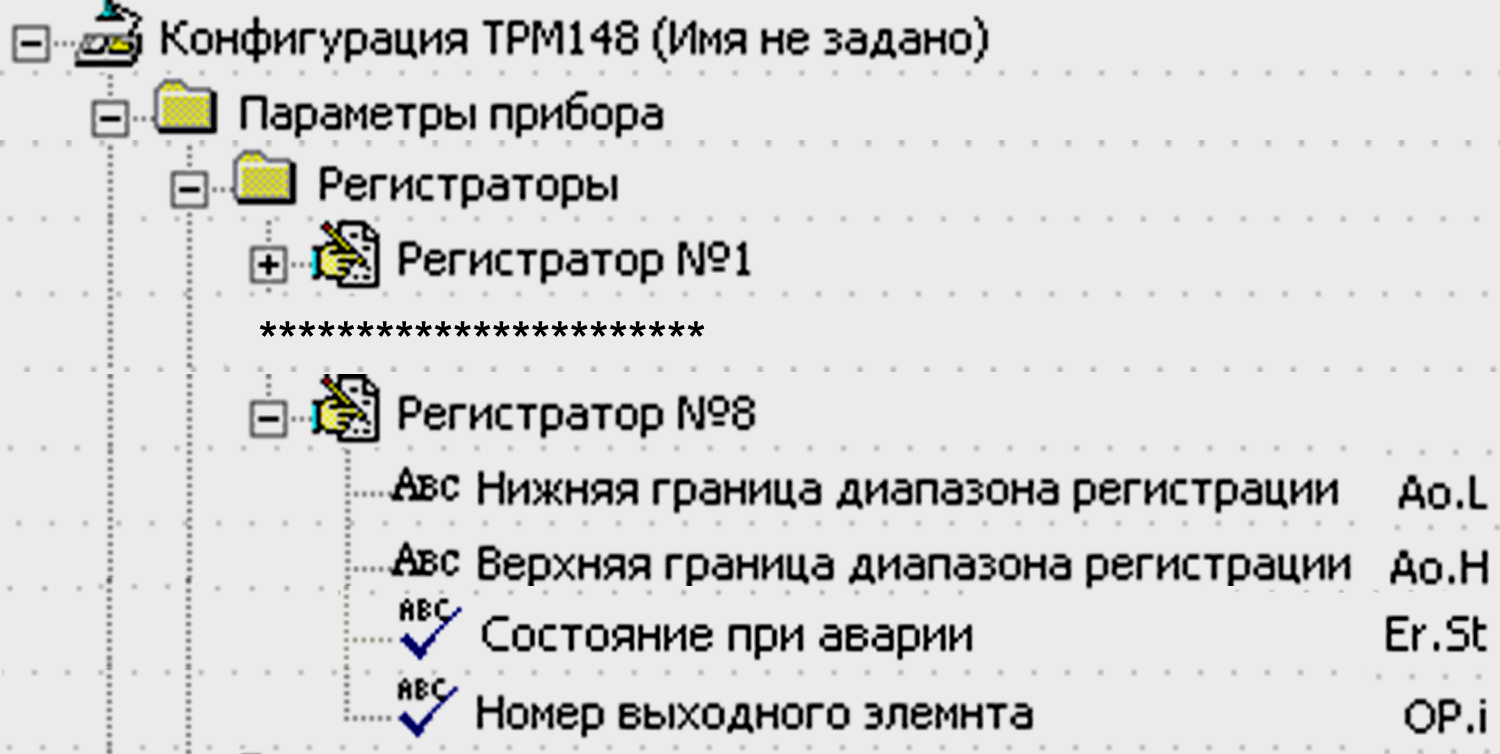
Значение параметра Er.St («Включен» или «Выключен»), задает состояние, в которое перейдет Регистратор, если на входе (входах) Вычислителя канала происходит обрыв датчика, информация с которого поступает в регистратор. Если прибор находится в состоянии Авария, но обрыва датчика, подключенного к регистратору нет, то регистратор работает в нормальном режиме. Значения параметра «Включен» и «Выключен» означают максимальный и минимальный уровень сигнала на выходе Регистратора.
Уставки. Графики коррекции уставки
Уставка – значение параметра, которое требуется поддерживать с помощью Регулятора в данный момент времени. Уставка вместе с текущим значением регулируемой величины подается на вход Регулятора.
Для каждого Регулятора задаются следующие параметры Уставки:
тип Уставки;
значение Уставки;
подключение/отключение Графика коррекции Уставки
скорость выхода на Уставку;
допустимые границы задания Уставки.
Способ задания Уставки
В приборе реализован следующий вариант задания Уставки: Уставка задается ПС, затем передается Регулятору, подключенному к данному ПС.
Тип Уставки
В приборе ТРМ148 в качестве Уставки могут быть заданы:
значение регулируемой физической величины (тип – «значение»);
значение выходной мощности, передаваемой в ПС (тип – «мощность»).
Тип Уставки задается параметром P.-SP.
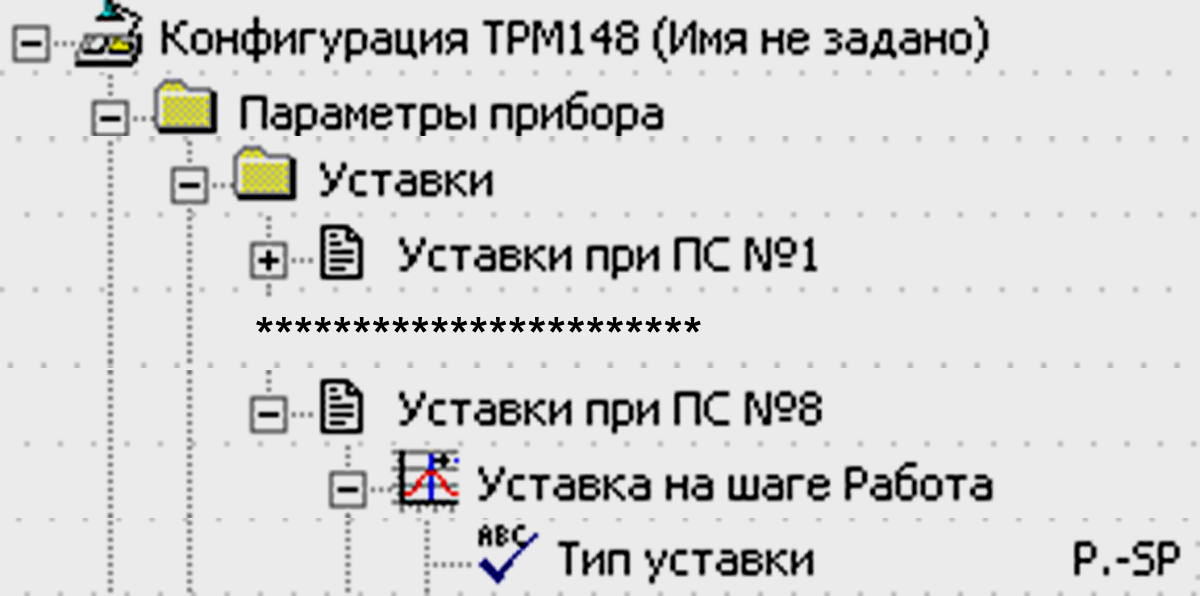
Задание Уставки типа «мощность» бывает следует на некоторых стадиях техпроцесса (в т. ч. на стадии остановки процесса), когда контролировать физический параметр системы не требуется или невозможно. При этом типе уставки задается фиксированное значение мощности, которое будет подаваться на ИМ. Регулирование отключено.
Значение Уставки
Значение Уставки типа «значение» задается в единицах регулируемой величины и должно находиться в диапазоне измерения Датчика (точнее в диапазоне Вычисления, т. к. регулятор работает с Вычислителем).
Значение Уставки типа «мощность» задается в относительных единицах и принимает значения:
в диапазоне от «0» до «1», – если используется БУИМ типа «нагреватель»;
в диапазоне от «–1» до «0», – если используется «холодильник»;
в диапазоне от «–1» до «1», – если используется как нагреватель, так и холодильник.
Скорость выхода на Уставку
В приборе можно ограничить скорость выхода на Уставку.
Эта функция используется в тех случаях, когда регулируемая величина должна плавно, с заданной скоростью, возрастать или уменьшаться:
в течение части времени функционирования – до достижения Значения уставки, далее осуществляется поддержание достигнутого значения Уставки (см. рисунок ).
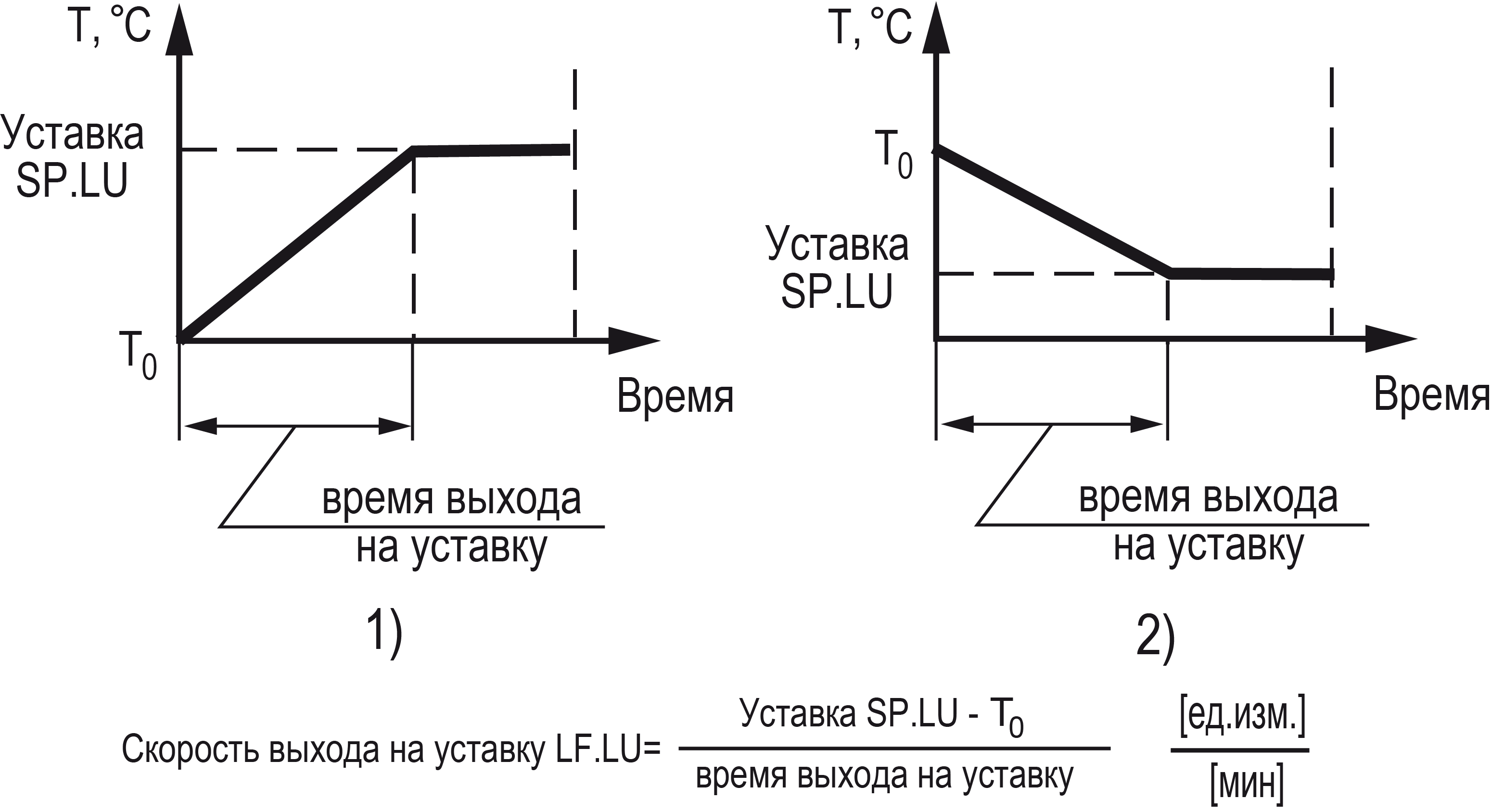
В начале функционирования Уставка принимает значение, равное начальному значению регулируемой величины (Т0), и сразу начинает изменяться с заданной скоростью. Например, если регулируется температура, то при начале функционирования Т0 примет значение температуры окружающей среды и начнет расти (или уменьшаться) с заданной скоростью от этого значения.
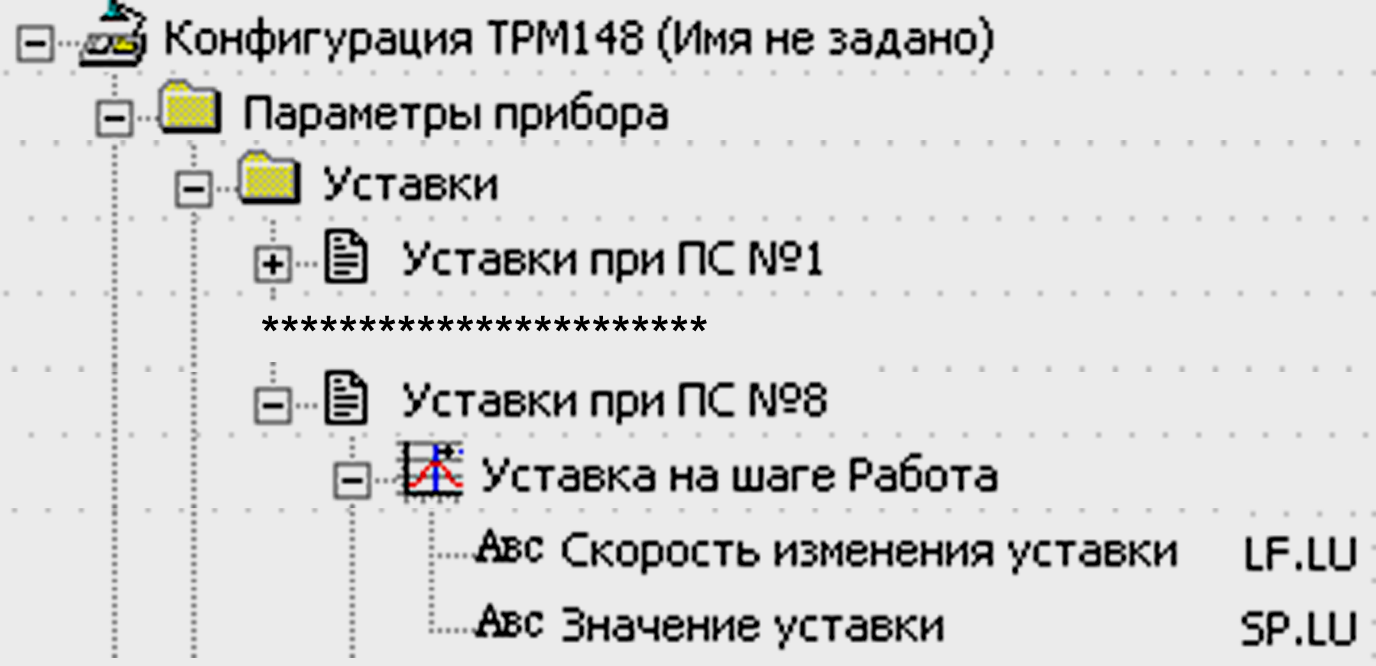
Параметр Скорость выхода на уставку LF.LU задается в единицах регулируемой величины в минуту. Если задать параметру LF.LU значение «0», то скорость принимается равной бесконечности, т. е. Уставка мгновенно достигает значения, задаваемого параметром SP.LU.
Графики коррекции уставки
В ряде случаев требуется, чтобы Уставка не являлась константой, а изменялась в зависимости от какого-то внешнего параметра. Например, в системах отопления температура теплоносителя должна меняться в зависимости от уличной температуры.
Для реализации подобной коррекции Уставки в приборе введены восемь Графиков. Каждый График представляет собой зависимость корректирующего значения от внешней величины. Внешняя величина может быть взята с любого из имеющихся работающих вычислителей, а также быть временем, исчисляемым в минутах. Для каждого объекта имеется свое независимое время. Уставка от времени может быть использована в тех процессах, в которых следует, чтобы уставка во время технологического процесса изменялась по времени. Канал, содержащий подключенный к графику вычислитель, должен быть включен.
Графику можно задать до 10 узловых точек, которые автоматически соединяются отрезками, образуя ломаную линию.
В процессе работы вычисленное по Графику корректирующее значение прибавляется к установленной Уставке. Механизм работы Графиков коррекции Уставки изображен на рисунке. Необходимо отметить, что Уставкапрогр. задается параметром SP.LU.
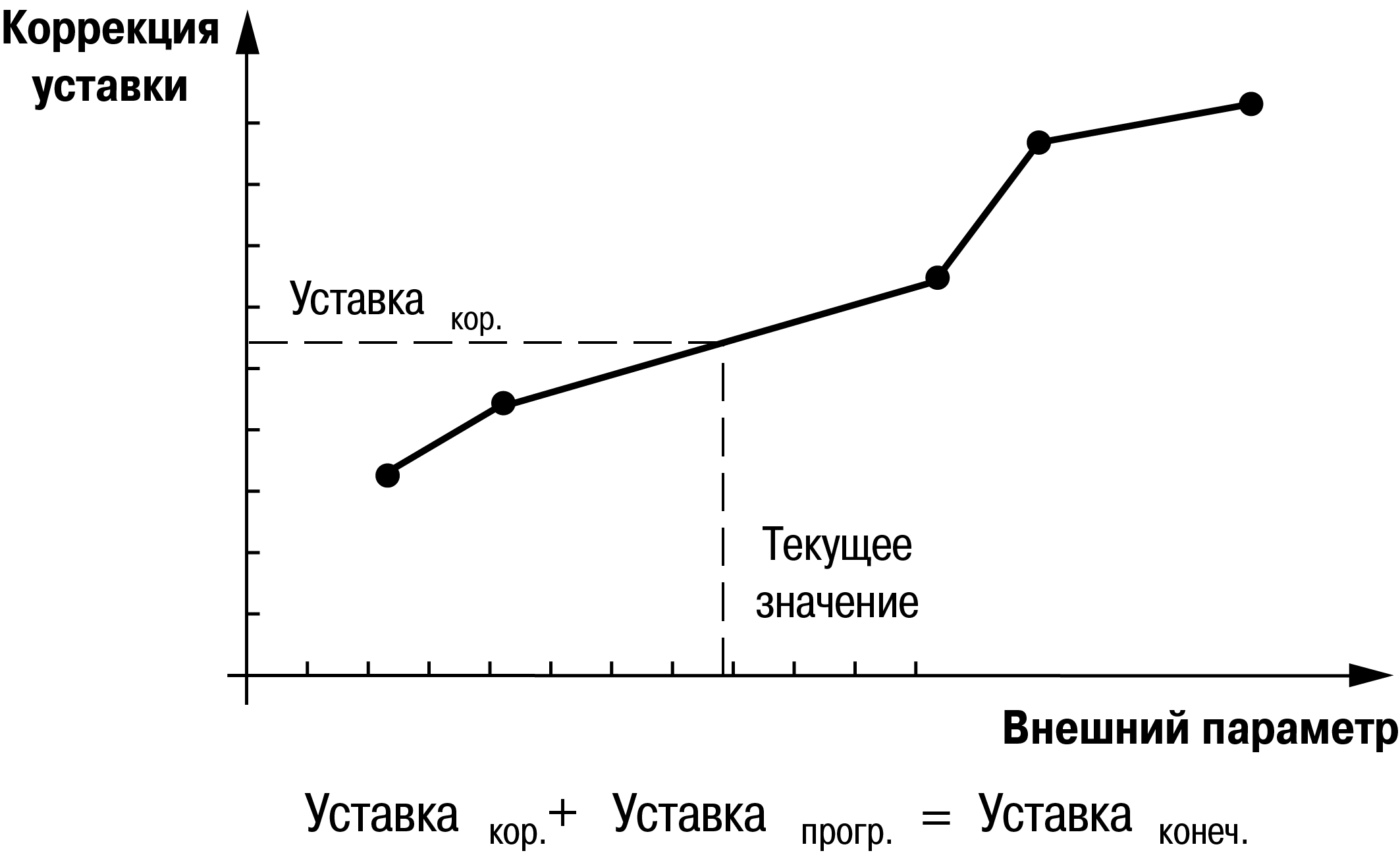
График коррекции Уставки можно подключить или отключить параметром or.SP.
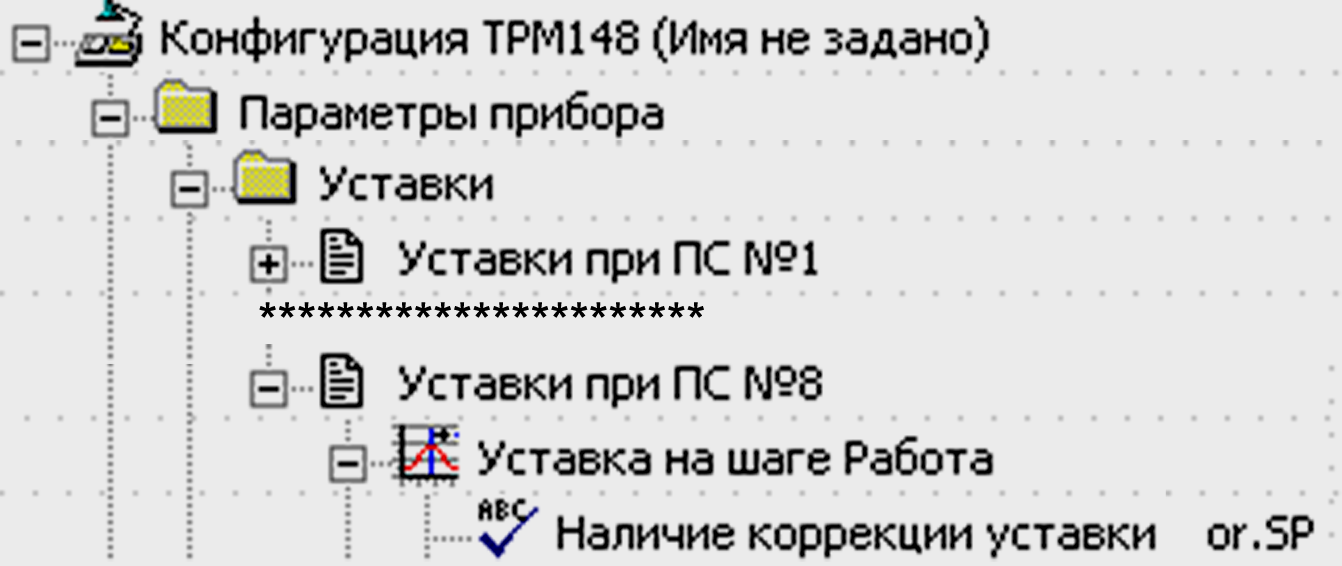
Аварийные ситуации и их возможные причины
Для ТРМ148 различают два вида АВАРИЙ: Критическую и Некритическую.
Поведение при критической аварии
В состоянии «Критическая АВАРИЯ» прибор не может продолжить работу без вмешательства извне.
Причиной возникновения критической аварии могут быть:
обрыв или неисправность датчика;
ВниманиеПрибор переходит в состояние «Авария» при обрыве датчика только в случае, если датчик применяется по назначению, т. е. в канале, в котором он подключен, используется уставка с типом (параметром p.-sp) = «значение».разрыв контура регулирования (LBA-авария);
выход регулируемой величины за допустимые пределы.
О критической аварии сигнализируют:
сообщение «FAIL» на ЦИ2
непрерывное свечение или мигание светодиода «АВАРИЯ»;
срабатывание (замыкание) ВЭ, предназначенного для подключения к нему различного оборудования, сигнализирующего о наступлении аварии.
Для подключения различного оборудования, сигнализирующего о наступлении
аварии, можно использовать любой свободный дискретный выход прибора.
В качестве ИМ-сигнализатора могут быть использованы различные сирены,
звонки, сигнальные лампы и т. д. При переходе прибора в режим АВАРИИ
происходит срабатывание указанного ВЭ. Это режим «Авария с сигнализацией» (слово FAIL на ЦИ2 и светодиод «АВАРИЯ» мигают).
Для отключения сигнального оборудования следует нажать кнопку . Прибор отключит ВЭ и перейдет в режим «Авария
без сигнализации» (слово FAIL на ЦИ2 и светодиод
«АВАРИЯ» включены).
После устранения причины АВАРИИ можно возобновить работу. Для этого
следует в течение 2 - 3 с нажать кнопку . Прибор перейдет в состояние,
предшествовавшее наступлению аварии.
Если причина АВАРИИ не была корректно устранена, то прибор автоматически вернется в состояние «Авария с сигнализацией».
Поведение при некритической аварии
В состоянии «Критическая АВАРИЯ» ТРМ148 продолжает функционировать. Прибор выдает предупреждение, и у оператора есть возможность оперативно устранить неисправность до того момента, когда АВАРИЯ станет критической.
О некритической аварии сигнализирует сообщение Attn, которое отображается на ЦИ2 с периодом ~2 с.
Индикация о некритической аварии сбрасываются кнопкой .
Выяснение причины АВАРИИ
Для того, чтобы выяснить причину любой аварии (критической или
некритической), следует нажать и удерживать кнопку .
На ЦИ2 отображается Код АВАРИИ.
Возможные причины аварий
Код Аварии | Причины Аварии |
|---|---|
104 | Инспектор сработал, т. е. выдал сигнал АВАРИИ |
90 | Ошибка конфигурации |
100 | Ошибка измерения |
220 | Авария после отключения питания |
0 | Ошибка отсутствует или уже устранена |
| АВАРИИ, индексируемые по каналам | |
32 + № Канала | Ошибка при расчете уставки по графику |
104+ № Канала | Сработал Инспектор в канале и выдал сигнал АВАРИИ |
80 + № Канала | Ошибочное измерение в состоянии РАБОТА |
40 + № Канала | LBA-авария |
192 + № Канала | Не подключено Выходное устройство |
208 + № Канала | Не подключен Регулятор |
224 + № Канала | Регуляторы подключены к разным объектам |
| Некритические АВАРИИ, индексируемые по каналам | |
8 | Сигнализация при работе в режиме Ручного управления |
176 + № Канала | Ошибочное измерение в Канале, номер которого приведен в коде |
№ канала (в объекте) для ТРМ148 принимает значения 0…7. | |
Техническое обслуживание
Техническое обслуживание
Во время выполнения работ по техническому обслуживанию прибора следует соблюдать требования безопасности из раздела.
Техническое обслуживание прибора проводится не реже одного раза в 6 месяцев и включает следующие процедуры:
- проверка крепления прибора;
- проверка винтовых соединений;
- удаление пыли и грязи с клеммника прибора.
Поверка
Поверка прибора проводится территориальными органами или ведомственными метрологическими службами потребителя, аккредитованными на проведение таких операций.
Межповерочный интервал составляет три года.
Требования к поверке, порядок и основные этапы ее проведения определяются методикой МИ 3067-2007.
Методика поверки поставляется предприятием-изготовителем прибора по требованию заказчика.
Юстировка
Общие сведения
Юстировка предназначена для восстановления метрологических характеристик прибора в случае их изменения после длительной эксплуатации прибора или проведения ремонтных работ, связанных со схемой измерения входных параметров.
Юстировка прибора заключается в проведении ряда технологических операций, обеспечивающих восстановление его метрологических характеристик в случае их изменения после длительной эксплуатации прибора.
Юстировка выполняется при помощи эталонных источников сигнала, имитирующих работу датчиков. Эти источники подключают к контактам Вход 1 прибора. Во время юстировки прибор вычисляет соотношения между поступившими входными сигналами и сигналами соответствующих опорных точек схемы. Вычисленные соотношения (коэффициенты юстировки) записываются в энергонезависимую память и используются как базовые при выполнении всех дальнейших расчетов.
Коэффициенты, полученные после юстировки одного (любого) первичного преобразователя из выбранной группы, автоматически распространяются на все остальные преобразователи этой группы.
В приборе предусмотрены юстировка датчика температуры свободных концов термопар и юстировка выходных ЦАП «параметр-ток» (для модификаций приборов, где в качестве ВУ используются ЦАП).
Ошибки при юстировке прибора
Причина ошибки | Обозначение на ЦИ |
|---|---|
Короткое замыкание датчика (для ТС) | 0.0.0.0. |
Обрыв датчика (для ТС и ТП) | - - - - |
Значение коэффициента юстировки ниже установленного для него предела | LLLL |
Значение коэффициента юстировки выше установленного для него предела | НННН |
Температура свободных концов ТП не соответствует нормальным условиям юстировки | OtCL |
Отказ измерительного устройства | AdEr |
При появлении сообщения об ошибке следует внимательно проверить соответствие источника сигнала, подключенного к контактам Входа 1 заданному (в параметре in-t) типу первичного преобразователя, правильность схемы их соединения, а также значение заданного для юстировки сигнала. После устранения выявленных ошибок операцию юстировки следует повторить в установленном порядке.
Перед проведением юстировки установить для датчика Входа 1 значение параметра in.SH = 0,0, а параметра in.SL = 1,000.
Отключить цифровые фильтры, установив значения параметров in.Fd и in.FG = 0,0.
При проведении юстировки прибора следует соблюдать меры безопасности, изложенные в разделе.
Юстировка для работы с ТСМ и ТСП
Для юстировки прибора с медными и платиновыми термометрами сопротивления следует:
Подключить к контактам Входа 1 прибора магазин сопротивлений типа Р4831 (или подобный ему с классом точности не хуже 0,05), установив на нем значение из таблицы ниже.
Тип датчика
Значение сопротивления, Ом
50М, 50П, Pt 50
50,0
100М, 100П, Pt 100, 100Н
100,0
500М, 500П, Pt 500, 500Н
500,0
1000М, 1000П, Pt 1000, 1000Н
1000,0
Нестандартизованный медный ТС R0 = 53 Ом
53,0
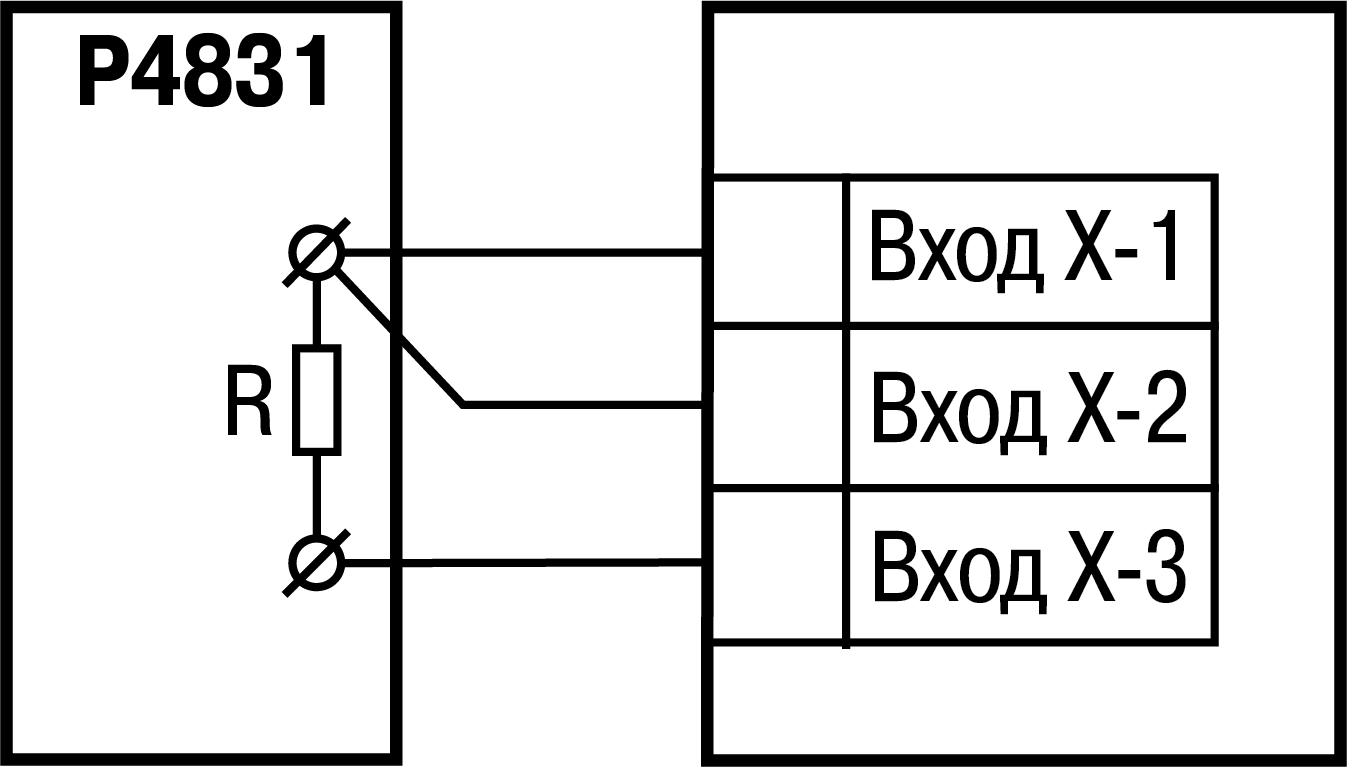
Подключение при юстировке ТСМ и ТСП Включить питание прибора и установить для Входа 1 в параметре in-t тип датчика, соответствующий юстируемому первичному преобразователю. Соединение прибора с магазином сопротивления производить по трехпроводной схеме. Через 3…5 минут проконтролировать показания ЦИ на Входе 1, к которому подключен магазин сопротивлений. Они должны быть равны 0,0 ± 0,3 °С.
Если абсолютная погрешность измерения в этой точке превышает 0,3 °С, необходимо выполнить операции, указанные далее.
Нажать
+ для перехода к юстировке. Если на ЦИ1 появляется
и мигает сообщение CALb, подтвердить вход в процедуру
юстировки клавишей . На ЦИ прерывисто засветится «0». Ввести пароль 104 и нажать кнопку
на
передней панели прибора. На ЦИ засветится слово «tYP1».- Нажать кнопку , запустив процесс вычисления коэффициентов,
после окончания вычисления на ЦИ отобразится коэффициент.
Нажать кнопку
для
записи полученного коэффициента в память и возврата в режим юстировки
прибора.
Юстировка окончена. Выключить напряжение питания и отключить от прибора магазин сопротивлений.
Юстировка для работы с ТП и АД с сигналами «– 50,0…+ 50,0 мВ» и «0…1 В»
Для юстировки прибора с термопарами, активными датчиками с выходным сигналом «– 50,0…+ 50,0 мВ» и «0…1 В» следует:
Подключить к контактам Входа 1 прибора дифференциальный вольтметр В1-12 в режиме калибратора напряжений или аналогичный ему источник образцового напряжения с классом точности не ниже 0,05. Соединение прибора с калибратором выполнить по схеме, приведенной на рисунке ниже, с соблюдением полярности подключения.
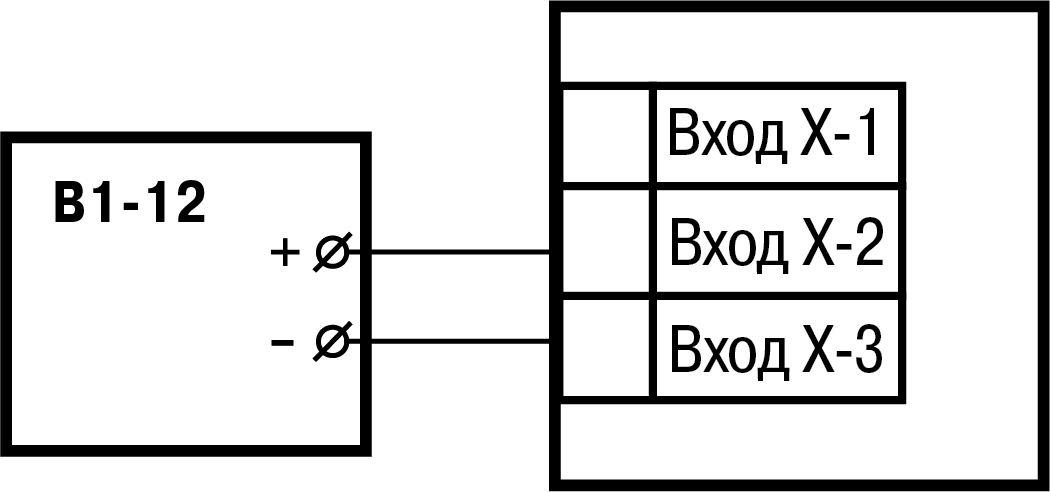
Включить питание прибора и установить для Входа 1 в параметре in-t тип датчика, соответствующий юстируемому первичному преобразователю. Отключить работу автоматической коррекции по температуре свободных концов, установив в параметре Cj-.C значение «oFF».
- Для юстировки прибора с датчиком «–50,0…+50,0 мВ» необходимо установить в параметре Ain.L значение «– 50,0», а в параметре Ain.H – значение «50,0».
Для юстировки прибора с датчиком «0…1,0 В» необходимо установить в параметре Ain.L значение «0,0», а в параметре Ain.H – значение «100,0».
Установить на выходе калибратора напряжения значение, соответствующее данным из таблицы ниже.
Через 1…2 минуты проконтролировать показания ЦИ на Входе 1. Эти показания должны соответствовать данным, приведенным в таблице выше.Тип датчика Напряжение на выходе калибратора, мВ Измеренное значение
Отображение на ЦИ Допустимая погрешность ТХК(L)
40,3
500,0 °С
± 1,0 °С
ТХА(К)
40,3
975,0 °С
± 1,0 °С
ТНН(N)
40,3
1105,8 °С
± 1,0 °С
ТЖК(J)
40,3
718,6 °С
± 1,0 °С
ТПП(R)
20,15
1694,8 °С
± 2,0 °С
ТПП(S)
15,00
1452,0 °С
± 2,0 °С
ТВР(А-1)
20,15
1269,8 °С
± 2,0 °С
ТВР(А-2)
20,15
1256,3 °С
± 2,0 °С
ТВР(А-3)
20,15
1281,8 °С
± 2,0 °С
ТМК(Т)
20,15
388,3 °С
± 1,0 °С
ТПР(В)
10,08
1498,3 °С
± 2,0 °С
– 50…+50 мВ
40,3
40,3
± 0,1
0…1,0 В
1000
100,0
± 0,2
Если погрешность измерения в этой точке превышает указанное значение, выполнить п. 3. Для ТПП(S) перед выполнением п. 3 установить на выходе калибраторе напряжения значение равное 20,15 мВ.
Юстировка окончена. Выключить напряжение питания и отсоединить от входа прибора вольтметр В1-12.
Юстировка прибора для работы с активными датчиками тока
Для юстировка прибора для работы с активными датчиками тока следует:
Подключить к контактам Входа 1 прибора дифференциальный вольтметр В1-12 в режиме калибратора тока или аналогичный ему источник образцового постоянного тока с классом точности не ниже 0,05. Соединение прибора с калибратором выполнить по схеме, приведенной на рисунке ниже, с соблюдением полярности подключения. Значение сопротивления должно составлять R = 100,0 Ом ± 0,05 %.
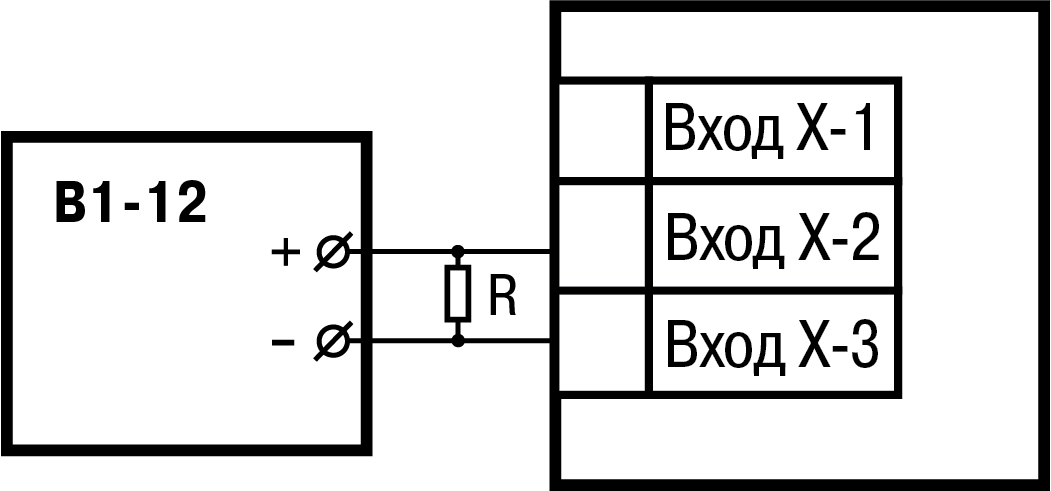
Включить питание прибора и установить для Входа 1 в параметре in-t тип датчика, соответствующий юстируемому первичному преобразователю. Установить в параметре Ain.L значение «0,0», а в параметре Ain.H – значение «100,0».
Задать на выходе прибора В1-12 необходимое значение тока (таблица ниже).
Через 5 – 10 сек проконтролировать показания ЦИ на Входе 1, к которому подключен прибор В1-12. Эти показания должны быть равны 100,0 ± 0,2 %. Если погрешность измерения в этой точке превышает приведенное значение, выполнить п. 3.Тип датчика
Ток на В1-12, мА
0…5 мА
5,0
4…20 мА
20,0
0…20 мА
20,0
Юстировка окончена. Выключить напряжение питания и отсоединить от прибора источник тока.
Юстировка датчика температуры свободных концов термопар
Для юстировки датчика температуры свободных концов термопар следует:
Подключить, соблюдая полярность соединения, к контактам Входа 1 прибора свободные концы любой из термопар, перечисленных в таблице 2.6, (кроме ТПР(В)). Поместить рабочий спай термопары в сосуд Дьюара заполненный смесью льда с дистиллированной водой (температура смеси (0 ± 0,1) °С). Измерение температуры производить термометром с погрешностью измерения не более 0,2 %, например ТЛ4.
- Включить питание прибора и установить для Входа 1 в параметре in-t тип датчика, соответствующий типу подключенной термопары.
Включить автоматическую коррекцию ЭДС термопары по температуре её свободных концов, установив в параметре Cj-.C значение «on».
После прогрева прибора (примерно через 20 минут после включения напряжения питания) произвести юстировку датчика температуры свободных концов, выполнив действия в порядке и последовательности, указанных в п.4.
Нажать
+ для перехода к юстировке. Если на ЦИ1 появляется
и мигает сообщение CALb, подтвердить вход в процедуру
юстировки клавишей . На ЦИ прерывисто засветится «0». Ввести пароль 102 и нажать кнопку
на
передней панели прибора. На ЦИ засветится слово «tYP2».- Нажать кнопку , запустив процесс вычисления коэффициентов,
после окончания вычисления на ЦИ отобразится коэффициент.
Нажать кнопку
для
записи полученного коэффициента в память и возврата в режим юстировки
прибора.
Юстировка окончена. Выключить напряжение питания и отсоединить от прибора термопару.
Юстировка выходных элементов типа «И»
Для юстировки выходных элементов типа «И» следует:
Подключить ВЭ типа «И» (ЦАП «параметр – ток 4…20 мА») согласно схеме, приведенной на рисунке ниже. Проконтролировать напряжение источника питания оно должно быть в диапазоне 15…28 В.
В качестве измерителя напряжения может быть использован прибор для калибровки вольтметров Р3003 или иной прибор того же класса с разрешающей способностью 0,001 В.
На магазине сопротивлений установить значение R = 500,0 Ом.
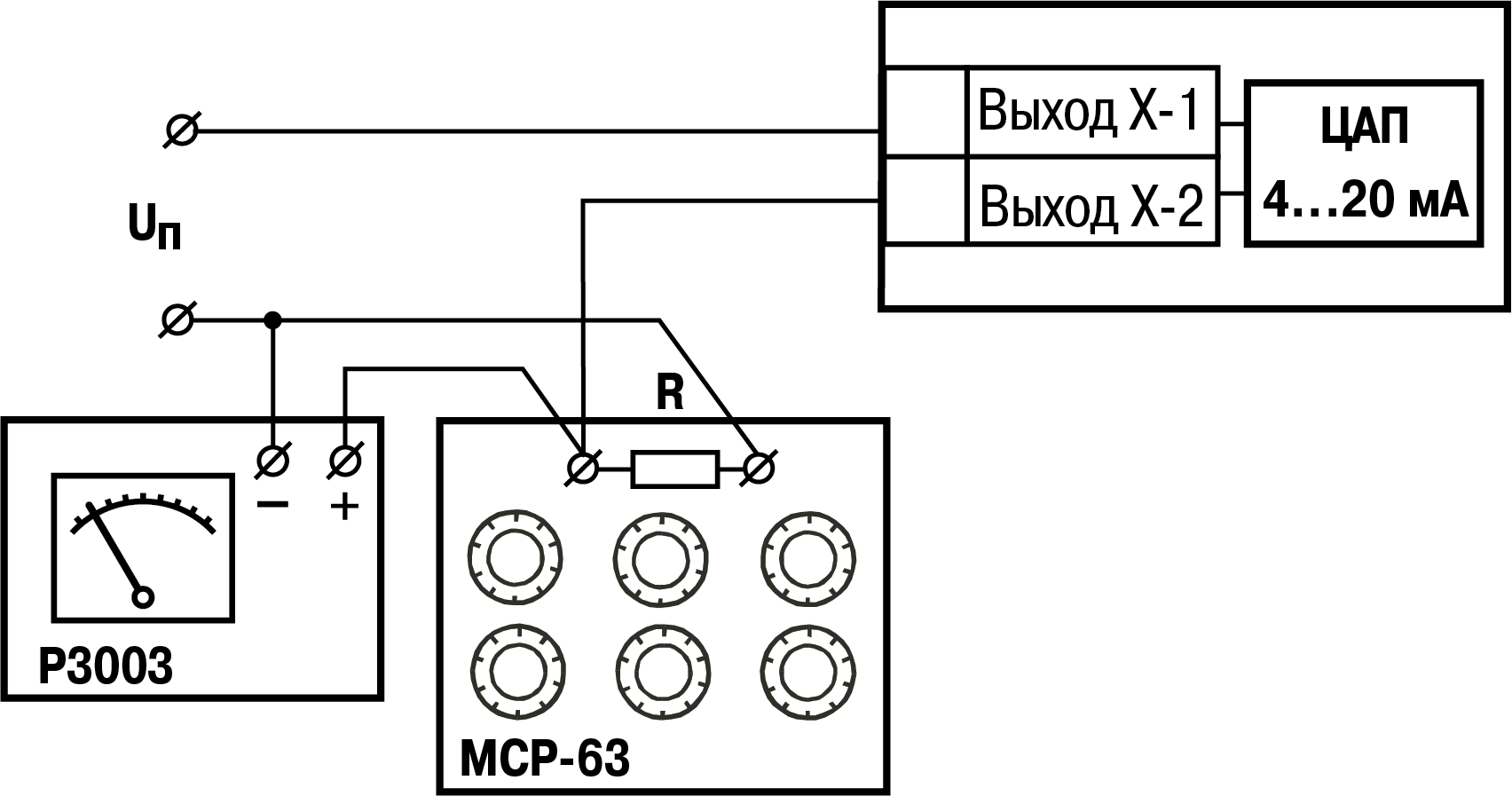
- Включить питание прибора.
Нажать
+ для перехода к юстировке. Если на ЦИ1 появляется
и мигает сообщение CALb, подтвердить вход в процедуру
юстировки клавишей . На ЦИ прерывисто засветится «0». Ввести пароль 106 и нажать кнопку
на
передней панели прибора. На ЦИ засветится слово «tYP5».для юстировки минимальной границы выходного сигнала для ЦАП ВЭ1 кнопками
и выбрать параметр С1.4 и нажать кнопку . Кнопками и изменить значение параметра
и добиться, чтобы показания вольтметра соответствовали 2,0 В.- Нажать кнопку
для записи полученного коэффициента в память и возврата в режим юстировки выходных элементов типа «И».
для юстировки максимальной границы выходного сигнала для ЦАП ВЭ1 кнопками
и выбрать параметр С1.20 и нажать кнопку . Кнопками и изменить значение параметра
и добиться, чтобы показания вольтметра соответствовали 10,0 В.Нажать кнопку
для
записи полученного коэффициента в память и возврата в режим юстировки
выходных элементов типа «И».Для юстировки ЦАП ВЭ3 выполнить действия, описанные в п И.6.3, подобрав соответственно значения параметров С2.4 и С2.20
Для выхода из режима юстировки выходных элементов типа «И» нажать кнопку
.
Выключить напряжение питания и отсоединить оборудование.
Юстировка датчика положения задвижки
Для юстировки датчика положения задвижки (далее — ДПЗ) следует:
Для канала с подключенным датчиком положения в параметре in_t устанавливается код, соответствующий подсоединенному датчику положения, например, P.r0.9).
Задвижка устанавливается в крайнее закрытое положение.
Нажать
+ для перехода к юстировке ДПЗ. Если на ЦИ1 появляется
и мигает сообщение CALb, подтвердить вход в процедуру
юстировки клавишей .Ввести пароль 118 и нажать кнопку
на
передней панели прибора. Убедиться в появлении на цифровом индикаторе
заставки 
Выбрать кнопками
и для юстировки канал С2. Убедиться в появлении на ЦИ3 значения «C2». ПредупреждениеС2 – обозначение номера входа (считая от 1). При повторении процедуры для других входов номера будут С4, С6 и С8, соответственно.
ПредупреждениеС2 – обозначение номера входа (считая от 1). При повторении процедуры для других входов номера будут С4, С6 и С8, соответственно.Нажать кнопку
и
убедиться в появлении на ЦИ4 значения «0» (готовность прибора к юстировке
крайнего закрытого положения задвижки). 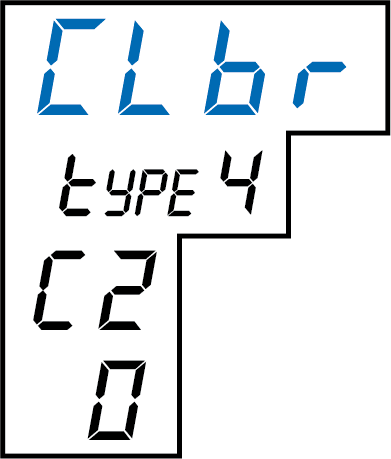
Нажать кнопку
и
наблюдать последовательное появление четырех прочерков на ЦИ2 . По
окончании юстировки на ЦИ2 отображается заставка и вычисленное прибором
значения юстировочного коэффициента.Для записи юстировочного коэффициента в память прибора нажать кнопку
. После записи прибор выходит из меню юстировки
и переходит в состояние, из которого юстировка была запущена.Установить задвижку в крайнее открытое положение.
Повторить действия из пп. 4…6.
Кратковременно нажимает кнопку
и убедиться в появлении на ЦИ
значения «99» (готовность прибора к юстировке крайнего открытого
положения задвижки).Повторить действия по пп. 7, 8.
Юстировка ДПЗ для выбранного канала завершена. Показания прибора в измерения положения задвижки должны быть равны 100,0.
Конфигурационные и оперативные параметры
Список параметров: максимальный уровень доступа
Имя | Название | Отображение на ЦИ2 | Значение (в Конфигураторе, на ЦИ) | Модификация, в которой этот параметр уже задан |
|---|---|---|---|---|
| ОБЩИЕ ПАРАМЕТРЫ | ||||
dEv | Название прибора |
| Устанавливает изготовитель | 1…6 |
vEr | Версия прошивки |
| Устанавливает изготовитель | 1…6 |
mod.v | Модификация прибора |
| от 0 до 255 | 1…6 |
sr.no | Серийный номер |
| от 1 до 9999 | 1…6 |
| ОБЪЕКТЫ | ||||
n.Obj | Количество объектов |
| от 1 до 8 |
|
0.OBJ | Групповой атрибут дерева «Объекты» |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский |
|
| Объекты \ Объект №... | ||||
n.Ch | Кол-во каналов в в объекте |
| от 0 до 8 | 1…6 |
| Объекты \ Объект №... \ Ссылка №... на канал | ||||
S.idx | Индекс канала |
| 0. Канал № 1 1. Канал № 2 2. Канал № 3 3. Канал № 4 4. Канал № 5 5. Канал № 6 6. Канал № 7 7. Канал № 8 или отключен |
|
| Каналы | ||||
0.SAU | Групповой атрибут дерева «Каналы» |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский | |
| Каналы \ Канал №... | ||||
S.SAU | Семафор принадлежности объекту |
| 0. Объект № 1 1. Объект № 2 2. Объект № 3 3. Объект № 4 4. Объект № 5 5. Объект № 6 6. Объект № 7 7. Объект № 8 8. Не занят |
|
rEGL | Регулятор в канале |
| 0. Выключен 1. Включен |
|
insP | Инспектор в канале |
| 0. Выключен 1. Включен | 4 |
Ch | Групповой атрибут Канала |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский |
|
| Входы | ||||
0.Mes | Групповой атрибут дерева «Входы» |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский |
|
Cj-.C | Режим коррекции по температуре свободных концов ТП | OFF | Выключен | 1…6 |
| ON | Включен | |||
oFFS | «Смещение нуля АЦП» | –999...9999 [ед. изм.] | ||
| Входы \ Вход №... | ||||
in-t | Тип датчика | OFF | Датчик отключен | |
| R.426 | Cu 100 (α = 0,00426 оС -1) | |||
| R426 | Cu 50 (α = 0,00426 оС -1) | |||
| R.385 | Pt 100 (α = 0,00385 оС -1) | |||
| R.391 | 100 П (α = 0,00391 оС -1) | |||
| E__L | ТХК (L) | |||
| E__K | ТХА (K) | |||
| U-50 | Датчик –50…+50 мВ | |||
| R385 | Pt 50 (α = 0,00385 оС -1) | |||
| R391 | 50 П (α = 0,00391 оС -1) | |||
| R428 | 50 М (α = 0,00428 оС -1) | |||
| I4.20 | Датчик 4…20 мА | |||
| I0.20 | Датчик 0…20 мА | |||
| I0.5 | Датчик 0…5 мА | |||
| U0_1 | Датчик 0…1 В | |||
| R.428 | 100 М (α = 0,00428 оС -1) | |||
| R-23 | 53M (α = 0,00426 оС -1) | |||
| E__B | ТПР (B) | |||
| E__S | ТПП (S) | |||
| E__R | ТПП (R) | |||
| E__N | TНН (N) | |||
| E__J | ТЖК (J) | |||
| E_A1 | ТВР (А-1) | |||
| E_A2 | ТВР (А-2) | |||
| E_A3 | TВР (А-3) | |||
| E__T | TМК (Т) | |||
| P.RES | Резистивный датчик задвижки до 0,9 кОм | |||
| P0.20 | Датчик положения задвижки с токовым выходом 0...20мА | |||
| P0.5* | Датчик положения задвижки с токовым выходом 0...5мА | |||
| R.617 | Ni 100 (α = 0,00617 оС -1) | |||
| T426 | Cu 500 (α = 0,00426 оС -1) | |||
| T428 | 500 М (α = 0,00428 оС -1) | |||
| T385 | Pt 500 (α = 0,00385 оС -1) | |||
| T391 | 500 П (α = 0,00391 оС -1) | |||
| T617 | Ni 500 (α = 0,00617 оС -1) | |||
| T.426 | Cu 1000 (α = 0,00426 оС -1) | |||
| T.428 | 1000 М (α = 0,00428 оС -1) | |||
| T.385 | Pt 1000 (α = 0,00385 оС -1) | |||
| T.391 | 1000 П (α = 0,00391 оС -1) | |||
| T.617 | Ni 1000 (α = 0,00617 оС -1) | |||
| C.REG | Резистивный датчик задвижки до 2,0 кОм | |||
in.Fd | Постоянная времени цифрового фильтра |
| 0...1800 [с] (00:00…30:00 [мин]) | 1…6 |
in.FG | Полоса цифрового фильтра |
| 0...9999 [ед. изм.] | 1…6 |
itrL | Период опроса датчика |
| 0,1...30 [с] | 1…6 |
in.SH | Коррекция «сдвиг характеристики» |
| –999...9999 [ед. изм.] | 1…6 |
in.SL | Коррекция «наклон характеристики» |
| 0.9...1.1 | 1…6 |
Ain.L | Нижняя граница диапазона измерения (только для активных датчиков) |
| –999...9999 [ед. изм.] | 1…6 |
Ain.H | Верхняя граница диапазона измерения (только для активных датчиков) |
| –999...9999 [ед. изм.] | 1…6 |
dt | Групповой атрибут Входа |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский |
|
| Вычислители \ Вычислитель №... | ||||
CAL.t | Формула Вычислителя |
| 0. rept – повторитель 1. su – взвешенная сумма 2. sqr – квадратный корень 3. rat – частное 4. top – максимум 5. bott – минимум 6. aurg – медиана 7. arif – среднее арифметическое 8. rh – вычислитель влажности 9. off – вычислитель отключен | 2…6 |
A.ist | Психрометрический коэффициент для расчета влажности |
| от 0.064 до 0.14 | 3, 4, 6 |
CL.Fd | Постоянная времени цифрового фильтра |
| 0...1800 [с] (00:00…30:00 [мин]) |
|
CL.FG | Полоса цифрового фильтра |
| от 0 до 9999 [ед. изм.] |
|
n.in.C | Кол-во аргументов вычислителя |
| от 1 до 8 | 3, 4, 6 |
| Вычислители \ Вычислитель №... \ Вход №... вычислителя | ||||
t.in. | Тип аргумента Вычислителя |
| Вход прибора |
|
in. | Номер Входа |
| Вход 1…Вход 8 |
|
SCA | Весовой коэффициент для формулы «Взвешенная сумма» |
| от –100 до 1000 | 3, 4, 6 |
| Регуляторы | ||||
at.b4 | Групповой атрибут АНР |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский | |
| Регуляторы \ Регулятор №... | ||||
db | Зона нечувствительности регулятора |
| 0...9999 [ед. изм.] | 1, 3…6 |
rEG.t | Режим работы регулятора | CPR | Двухпозиционный (ON/OFF) | 1, 3…6 |
| REGL | ПИД | |||
OD.tP | Что подключено к регулятору |
| 0. ПС выключен 1. ПС включен | |
r.OD.i | Номер подключаемого Преобразователя сигнала |
| 0. ПС № 1 1. ПС № 2 2. ПС № 3 3. ПС № 4 4. ПС № 5 5. ПС № 6 6. ПС № 7 7. ПС № 8 | |
LBA | Контроль LBA-аварии |
| 1. Нет контроля LBA 2. Есть контроль LBA | 4…6 |
| Регуляторы \ Регулятор №... \ ПИД-Регулятор | ||||
Pb | Полоса пропорциональности |
| 0.001...9999 [ед. изм.] | 1, 3…6 |
ti | Постоянная интегрирования ti |
| 0...65535 [c] (00:00…1092:15 [мин]) | 1, 3…6 |
td.ti | td/ti – Отношение постоянной дифференцирования к постоянной интегрирования |
| 0...0.3 | 1, 3…6 |
i.UPr | Ограничение максимума интеграла |
| –100...100 [ед. изм.] | 1, 3…6 |
i.min | Ограничение минимума интеграла |
| –100...100 [ед. изм.] | 1, 3…6 |
P.nom | Номинальная мощность |
| –100...100 [ед. изм.] | 1, 3…6 |
P.CLD | Коэффициент мощности холодильника |
| от 0.01 до 10 |
|
| Регуляторы \ Регулятор №... \ Двухпозиционный (ОN/OFF) регулятор | ||||
HYS.C | Гистерезис двухпозиционного регулятора |
| 0...9999 [ед. изм.] | 1, 3…6 |
dEL | Время задержки переключения |
| 0...200 [с] (00:00…3:20[мин]) | 1, 3…6 |
HoLd | Мин. Время удержания |
| 0...200 [с] (00:00…3:20[мин]) | 1, 3…6 |
| Регуляторы \ Регулятор №... \ Автоматическая Настройка Регулятора \ Параметры настройки | ||||
Y0 | Уставка или начальное значение выходного сигнала |
| –9999...9999 [ед. изм.] | 1, 3…6 |
YdoP | Максимальное допустимое отклонение регулируемой величины |
| 0...999 [ед. изм.] | 1, 3…6 |
vSP | Допустимая скорость изменения уставки |
| от 0 до 9999 |
|
| Регуляторы \ Регулятор №... \ Автоматическая Настройка Регулятора \ Параметры ИМ | ||||
R.el | Тип исполнительного механизма |
| ТЭН задвижка |
|
t.val | Время полного хода трехпозиционного ИМ |
| от 1 до 999 | 3, 6 |
P.tol | Отклонение мощности на трехпозиционным ИМ |
| от 1 до 63 | 3, 6 |
| Регуляторы \ Регулятор №... \ Автоматическая Настройка Регулятора \ Допуски | ||||
dRs | Отклонение вектора |
| от 0.01 до 0.2 | |
dGs | Отклонение фазы |
| от 0.01 до 0.5 | |
dSKO | Среднее квадратичное отклонение |
| от 0.01 до 0.5 | |
| Регуляторы \ Регулятор №... \ Автоматическая Настройка Регулятора \ Оптимальные данные | ||||
Rsop | Вектор |
| от 0.3 до 1.5 | |
Gsop | Фаза |
| от –180 до –80 | |
B3 | Отношение периода колебаний системы к постоянной интегрирования |
| от 1 до 5 | |
| Регуляторы \ Регулятор №... \ Автоматическая Настройка Регулятора \ Параметры модели объекта | ||||
En | Отношение T2/T1 расчетной модели объекта (1,0...51,1) |
| от 0.001 до 300 | |
Be | Относительное запаздывание модели объекта (0,1...2,0) |
| от 0.001 до 100 | |
| Преобразователи сигналов \ Преобразователь сигналов №... | ||||
HAnd | Режим работы Преобразователя Сигнала |
| 0. Нормальный 1. Ручной |
|
S.OD | Семафор занятости ПС |
| 0. Откл. 1. Канал № 1 2. Канал № 2 3. Канал № 3 4. Канал № 4 5. Канал № 5 6. Канал № 6 7. Канал № 7 8. Канал № 8 |
|
Alr.t | Тайм-аут аварии |
| 0...600 [с] (00:00…10:00 [мин]) |
|
P.Alr | Аварийное значение выходного сигнала |
| от –100 до 100 [%] |
|
P.rES | Максимальная допустимая скорость изменения выходного сигнала |
| от 0 до 100 [%/мин] | 1, 3…6 |
P.Upr | Ограничение максимального значения выходного сигнала |
| от –100 до 100 [%] | 1, 3…6 |
P.min | Ограничение минимального значения выходного сигнала |
| от –100 до 100 [%] | 1, 3…6 |
F.in | Номер сетевого входа-источника входного сигнала |
| 0. Вход № 1 1. Вход № 2 2. Вход № 3 3. Вход № 4 4. Вход № 5 5. Вход № 6 6. Вход № 7 7. Вход № 8 |
|
Cp.t | Режим работы ПС |
| 0. Линейный 1. Ступенчатый |
|
Cp.tL | Тип логики при дискретном режиме работы |
| 0. прямая логика 1. обратная логика 2. П-образная 3. U-образная |
|
HYS.P | Гистерезис ПС при дискретном режиме работы |
| от 0 до 0.5 |
|
| Преобразователи сигналов \ Преобразователь сигналов №... \ Диапазон №... | ||||
nPC | Кол-во исполнительных механизмов (ИМ) |
| от 0 до 8 | |
PCP.i | Ссылка №... на БУИМ |
| 0. БУИМ № 1 1. БУИМ № 2 2. БУИМ № 3 3. БУИМ № 4 4. БУИМ № 5 5. БУИМ № 6 6. БУИМ № 7 7. БУИМ № 8 | |
| Блоки управления исполнительными механизмами \ БУИМ №... | ||||
S.MD | Семафор занятости БУИМ |
| 0. ПС № 1 1. ПС № 2 2. ПС № 3 3. ПС № 4 4. ПС № 5 5. ПС № 6 6. ПС № 7 7. ПС № 8 8. Свободен | |
PCP | Нижний порог рабочего сигнала БУИМ |
| от 0 до 1 |
|
db.F | Зона нечувствительности для задвижек (%) |
| от 0.05 до 10 | 3, 6 |
dLP | Наличие датчика положения задвижки |
| 0. Нет 1. Есть | 3, 6 |
t.DP | Тип подключения датчика положения |
| Вход прибора |
|
i.DP | Номер входа датчика положения |
| 0. № 1 1. № 2 2. № 3 3. № 4 4. № 5 5. № 6 6. № 7 7. № 8 | 6 |
t.StP | Мин. время остановки задвижки |
| 1...60 [с] (00:01…1:00 [мин]) | 3, 6 |
tP.L | Мин. время работы задвижки |
| от 0.1 до 10 [с] | 3, 6 |
tP.H | Полное время хода задвижки |
| 1...900 [с] (00:01…15:00 [мин]) | 3, 6 |
tFP | Время выборки люфта задвижки |
| от 0.1 до 10 [с] | 3, 6 |
LSP | Исходное положение задвижки в % |
| от 0 до 100 [%] | 3, 6 |
SE.P | Тип исполнительного механизма |
| 0. ИМ отключен 1. двухпозиционный ИМ 2. трехпозиционный ИМ | 3, 6 |
OP | Ссылка №... на вых.элемент |
| 0. Не задействован 1. Выходной элемент № 1 2. Выходной элемент № 2 3. Выходной элемент № 3 4. Выходной элемент № 4 5. Выходной элемент № 5 6. Выходной элемент № 6 7. Выходной элемент № 7 8. Выходной элемент № 8 | 1, 4...6 |
| Выходные устройства \ Выходное устройство №... | ||||
S.OE | Семафор занятости ВЭ |
| 0. БУИМ № 1 1. БУИМ № 2 2. БУИМ № 3 3. БУИМ № 4 4. БУИМ № 5 5. БУИМ № 6 6. БУИМ № 7 7. БУИМ № 8 8. Регистратор № 1 9. Регистратор № 2 10. Регистратор № 3 11. Регистратор № 4 12. Регистратор № 5 13. Регистратор № 6 14. Регистратор № 7 15. Регистратор № 8 16. Реле аварии 17. Инспектор № 1 18. Инспектор № 2 19. Инспектор № 3 20. Инспектор № 4 21. Инспектор № 5 22. Инспектор № 6 23. Инспектор № 7 24. Инспектор № 8 25. Откл. |
|
Pou | Тип выходного элемента |
| 0. Аналоговый 1. Дискретный | 1…6 |
tHP | Период ШИМ-импульсов при регулировании |
| 1...81 [с] (00:01…1:21[мин]) | 1, 4, 5 |
t.L | Минимальная длительность импульсов при ШИМ-регулировании |
| от 0.05 до 0.5 [с] | 1, 4, 5 |
| Уставки \ Уставки при ПС №... \ Уставка при состоянии … | ||||
or.SP | Наличие коррекции уставки |
| 0. уставка без коррекции 1. уставка+график1 2. уставка+график2 3. уставка+график3 4. уставка+график4 5. уставка+график5 6. уставка+график6 7. уставка+график7 8. уставка+график8 | 1, 3…6 |
LF.LU | Скорость выхода на уставку |
| 0...9999 [ед. изм./мин] | 1, 3…6 |
P.-SP | Тип уставки | NO | Значение | 1, 3…6 |
| YES | Мощность | |||
b.CH.L | Нижняя граница задания уставки |
| –9999...9999 [ед. изм.] |
|
b.CH.H | Верхняя граница задания уставки |
| –9999...9999 [ед. изм.] |
|
SP.LU | Значение уставки |
| –9999...9999 [ед. изм.] | 1, 3…6 |
| Инспекторы \ Инспектор №... \ | ||||
Rel.a | Подключенный к инспектору ВЭ |
| 0. Не задействован 1. Выходной элемент № 1 2. Выходной элемент № 2 3. Выходной элемент № 3 4. Выходной элемент № 4 5. Выходной элемент № 5 6. Выходной элемент № 6 7. Выходной элемент № 7 8. Выходной элемент № 8 | 2, 4…6 |
| Инспекторы \ Инспектор №... \ При состоянии … | ||||
E.USE | Использование инспектора при данном состоянии |
| 0. Не используется 1. Используется | 2, 4…6 |
LG.tY | Тип логики при данном состоянии |
| 0. Прямая логика 1. Обратная логика 2. П-образная 3. U-образная | 2, 4…6 |
rF.Pt | Точка отсчета порогов инспектора |
| 0. относит.Порогов 1. абсол.пороги | 4…6 |
A.i.j | Нижний порог |
| от –999 до 9999 [ед. изм.] | 2, 4…6 |
A.i.j | Верхний порог |
| от –999 до 9999 [ед. изм.] | 2, 4…6 |
BL.t | Время блокировки |
| 1...900 [с] (00:01…15:00 [мин]) | 2, 4…6 |
| Регистраторы \ Регистратор №... | ||||
Ao.L | Нижняя граница диапазона регистрации |
| от –999 до 9999 [ед. изм.] | |
Ao.H | Верхняя граница диапазона регистрации |
| от –999 до 9999 [ед. изм.] | |
Er.St | Состояние при аварии |
| 0. Выключен 1. Включен | |
OP.i | Номер выходного элемента |
| 0. Не задействован 1. Выходной элемент № 1 2. Выходной элемент № 2 3. Выходной элемент № 3 4. Выходной элемент № 4 5. Выходной элемент № 5 6. Выходной элемент № 6 7. Выходной элемент № 7 8. Выходной элемент № 8 | |
| Логика принятия решения об аварии | ||||
at.pr | Групповой атрибут |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский | |
| Логика принятия решения об аварии \ Логика в объекте №... \ Реш. при состоянии... | ||||
log.a | Реш. при состоянии… |
| 0. ИЛИ 1. И | 4, 5 |
| Блоки LBA-аварии \ Параметры LBA-аварии | ||||
d.LBA | Минимальное необходимое изменение входной величины |
| от 0.001 до 9999 | 4… 6 |
t.LBA | Время контроля LBA-аварии |
| 1...600 [с] (00:01…10:00 [мин]) | 4… 6 |
| Графики \ Входы графиков | ||||
at.a2 | Групповой атрибут |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской | 5, 6 |
|
|
| 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский |
|
in.Gr | Вход графика №... |
| 0. Не подключен 1. Вычислитель № 1 2. Вычислитель № 2 3. Вычислитель № 3 4. Вычислитель № 4 5. Вычислитель № 5 6. Вычислитель № 6 7. Вычислитель № 7 8. Вычислитель № 8 9. Время состояния объекта 1 10. Время состояния объекта 2 11. Время состояния объекта 3 12. Время состояния объекта 4 13. Время состояния объекта 5 14. Время состояния объекта 6 15. Время состояния объекта 7 16. Время состояния объекта 8 | 1, 3…6 |
| Графики \ График №... | ||||
Ch.At | Групповой атрибут дерева «Графики» |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский |
|
Node | Число узловых точек графика |
| от 0 до 10 | 1, 3…6 |
| Графики \ График №... \ Точка №... | ||||
absc | X-входная величина |
| от –999 до 9999 | 1, 3…6 |
ordn | Y-корректирующее значение |
| от –16383 до 16383 | 1, 3…6 |
| Сетевые параметры прибора | ||||
0.485 | Групповой атрибут дерева «Сетевые параметры прибора» |
| 0. Не редактируемый, Заводской 1. Редактируемый, Заводской 2. Не редактируемый, Пользовательский 3. Редактируемый, Пользовательский | |
bPS | Скорость обмена |
| 0. 2400 1. 4800 2. 9600 3. 14400 4. 19200 5. 28800 6. 38400 7. 57600 8. 115200 [бит/с] | 1…6 |
LEn | Длина слова данных |
| 0. 7 1. 8 | 1…6 |
PrtY | Контроль по четности | NO | 0. Отсутствует | 1…6 |
| EVEN | 1. Четность | |||
| ODD | 2. Нечетность | |||
Sbit | Количество стоп-бит |
| 0. 1 1. 2 | 1…6 |
A.Len | Размер сетевых адресов |
| 0. 8 1. 11 | 1…6 |
Addr | Базовый адрес прибора |
| от 0 до 255 при a.len = 8 от 0 до 2047 при a.len = 11 | 1…6 |
Rs.dl | Задержка ответа по RS-485 |
| от 0 до 50 [мс] | 1…6 |
| Служебные параметры | ||||
doG | Количество сбросов по watchdog |
| 0...9999 | 1…6 |
220 | Количество пропаданий питания |
| 0...9999 | 1…6 |
rES | Общее количество сбросов |
| 0...9999 | 1…6 |
r.SrC | Причина последнего пересброса |
| 0. e.res - внешний пересброс 1. p-on – сброс по включению питания 0. dog – сработал сторожевой таймер 1. e.fltr – сбой обмена с внешней EEPROM 2. p.fltr – сбой системы таймеров и ШИМ’ов 3. r.fltr – повреждение данных в ОЗУ не разрешенный к исполнению код | 1…6 |
behv | Реакция прибора на случайное отключение питания | RUN | Переход в состояние «РАБОТА» | 1…6 |
| STOP | Переход в состояние «СТОП» | |||
| FAIL | Переход в состояние «АВАРИЯ» | |||
| RET.A | Возврат в тот же режим | |||
bL.rU | Ручное управление мощностью | on | Блокировка установлена | |
| oFF | Блокировка снята | |||
al.re | Номер ВЭ, на который подается аварийный сигнал |
| 0. Не задействован 1. Выходной элемент № 1 2. Выходной элемент № 2 3. Выходной элемент № 3 4. Выходной элемент № 4 5. Выходной элемент № 5 6. Выходной элемент № 6 7. Выходной элемент № 7 8. Выходной элемент № 8 | 1…6 |
Str.s | Запуск программ по сети |
| 0. Запрещен 1. Разрешен | |
| Доступ с передней панели | ||||
A.Mes | Атрибуты доступа к дереву «Входы» |
| 0. Только по паролю 1. Чтение без пароля 2. Пароль не нужен | |
A.CAL | Атрибуты доступа к дереву «Вычислители» |
| 0. Только по паролю 1. Чтение без пароля 2. Пароль не нужен | |
A.OBJ | Атрибуты доступа к объектам |
| 0. Только по паролю 1. Чтение без пароля 2. Пароль не нужен | |
pa.b4 | Атрибуты доступа АНР |
| 0. Только по паролю 1. Чтение без пароля 2. Пароль не нужен | |
pa.pr | Атрибуты доступа к дереву «Логика принятия решения об аварии» |
| 0. Только по паролю 1. Чтение без пароля 2. Пароль не нужен | |
pa.a2 | Атрибуты доступа к дереву «Входы графиков» |
| 0. Только по паролю 1. Чтение без пароля 2. Пароль не нужен | |
A.485 | Атрибуты доступа к дереву «Сетевые параметры прибора» |
| 0. Только по паролю 1. Чтение без пароля 2. Пароль не нужен | |
pa.cf | Атрибуты доступа к дереву смены конфигураций |
| 0. Только по паролю 1. Чтение без пароля 2. Пароль не нужен | |
| Параметры индикации | ||||
ind.r | Частота обновления индикации |
| 0...60 [с] (00:00…1:00 [мин]) значение 0.00 соответствует обновлению индикации непосредственно после измерения | 1…6 |
ind.S | Код видимости параметров |
| от 1 до 3 | 1…6 |
ind.t | Время циклической индикации |
| 1...600 [с] (00:01…10:00 [мин]) | 1…6 |
dP | Индикация Вычислителя №... |
| от 0 до 3 | 1…6 |
Оперативные параметры: Максимальный уровень доступа
Имя | Название | Индексация | Тип значения |
|---|---|---|---|
rEAd | Значение с измерителя | 0,1 (по измерителям) | Стандартный четырехбайтовый float (IEEE). Коды исключительной ситуации: 0х0 – Значение заведомо неверно 0х6 – Данные не готовы 0х7 – Датчик отключен 0х8 – Велика температура свободных концов ТП 0х9 – Мала температура свободных концов ТП 0хA – Вычисленное значение слишком велико 0хB – Вычисленное значение слишком мало 0хC – Короткое замыкание 0хD – Обрыв датчика 0хE – Отсутствие связи с АЦП 0хF – Некорректный калибровочный коэффициент |
r.CAL | Значение, подсчитанное вычислителем | 0...7 (по вычислителям) | Стандартный четырехбайтовый float (IEEE). Коды исключительной ситуации: 0х0 – вычисление невозможно 0х6 – Данные не готовы 0х8 – Велика температура свободных концов ТП 0х9 – Мала температура свободных концов ТП 0хA – Вычисленное значение слишком велико 0хB – Вычисленное значение слишком мало 0хC – Короткое замыкание 0хD – Обрыв датчика 0хE – Отсутствие связи с АЦП 0хF – Некорректный калибровочный коэффициент Группа 500000х – ошибки вычисления 0x5000000 – Неверное количество входов 0x5000001 – Отключен вход вычислителя 0x5000002 – Отключен датчик, используемый вычислителем 0x5000003 – Не соответствуют датчик и вычислитель 0x5000004 – Отключен фильтр, используемый вычислителем 0x5000005 – Недопустимый формат данных фильтра RS485 0x5000006 – Мала температура сухого термометра 0x5000007 – Велика температура сухого термометра 0x5000008 – Мала температура влажного термометра 0x5000009 – Велика температура влажного термометра 0x500000A – Вычислитель отключен 0x500000B – На входе вычислителя корня отрицательное число 0x500000C – Неверно задан индекс датчика 0x500000D – Неверно задан индекс сетевого фильтра |
rd.rg | Состояние регистратора | 0...7 (по регистраторам) | Стандартный четырехбайтовый float (IEEE). При опросе неработающего (отключенного) канала выдает 0. |
r.Out | Значение на выходе ПС | 0...7 (по ПС) | Стандартный четырехбайтовый float (IEEE). Коды исключительной ситуации: 0х0 - Значение заведомо неверно 0х1 - Попытка записать в параметр неверное значение |
Set.P | Значение с уставки регулятора | 0...7 (по регуляторам) | Стандартный четырехбайтовый float (IEEE). Коды исключительной ситуации: 0х6 - Данные не готовы 0x3000001 - у регулятора отсутствует уставка (регулятор не работает в данный момент) 0x3000002 - у регулятора уставка типа «мощность» |
r.St | Состояние объекта | 0, 1...8 (по объектам) | 0. Run 1. Stop 2. Fail |
Измерение влажности психрометрическим методом
Относительная влажность вычисляется в приборе по психрометрическому методу.
Психрометрический метод основан на измерении разности температур сухого и влажного термометров. Температура влажного термометра всегда ниже температуры сухого из/за испарения воды с поверхности фитиля. Чем суше воздух (влажность ниже), тем интенсивнее испаряется вода с поверхности фитиля, тем ниже температура увлажняемого термометра.
Из существующих полуэмпирических психрометрических формул выведена общепринятая формула относительной влажности:
где φ — относительная влажность воздуха, %;
Евлаж. — максимальное возможное парциальное давление водяного пара при температуре воздуха Твлаж., °С;

Есух. — максимальное возможное парциальное давление водяного пара при температуре воздуха Тсух., °С;
р — атмосферное давление;
Тсух. — температура сухого термометра, °С;
Твлаж. — температура влажного термометра, °С;
A — психрометрический коэффициент (психрометрическая постоянная).
Психрометрический коэффициент A зависит от многочисленных факторов, влияющих на тепло- и массообмен чувствительного элемента «влажного» термометра с окружающей средой:
размер и форма чувствительного элемента увлажненного термометра;
вид и состояния смачиваемого фитиля;
температура смачивающей воды и теплопроводности фитиля;
влияния тепловой радиации.
Среди внешних факторов наибольшее значение имеет скорость воздушного потока, обдувающего увлажненный термометр. Если она больше 2,5 м/с, то коэффициент A приближается к величине ~0,0064 1/°С.
Если обдува нет, то коэффициент A сильно возрастает, поэтому рекомендуется устанавливать принудительную вентиляцию. В приборе значение A устанавливается — в диапазоне 0,0064...0,008 1/°С.
«Сухой» и «влажный» датчики температуры следует крепить один над другим на расстоянии 50...100 мм, перпендикулярно или параллельно стенке (см. рисунки ниже). Под «влажным» датчиком помещается резервуар с водой, в который опускают увлажняющий фитиль, закрывающий датчик.
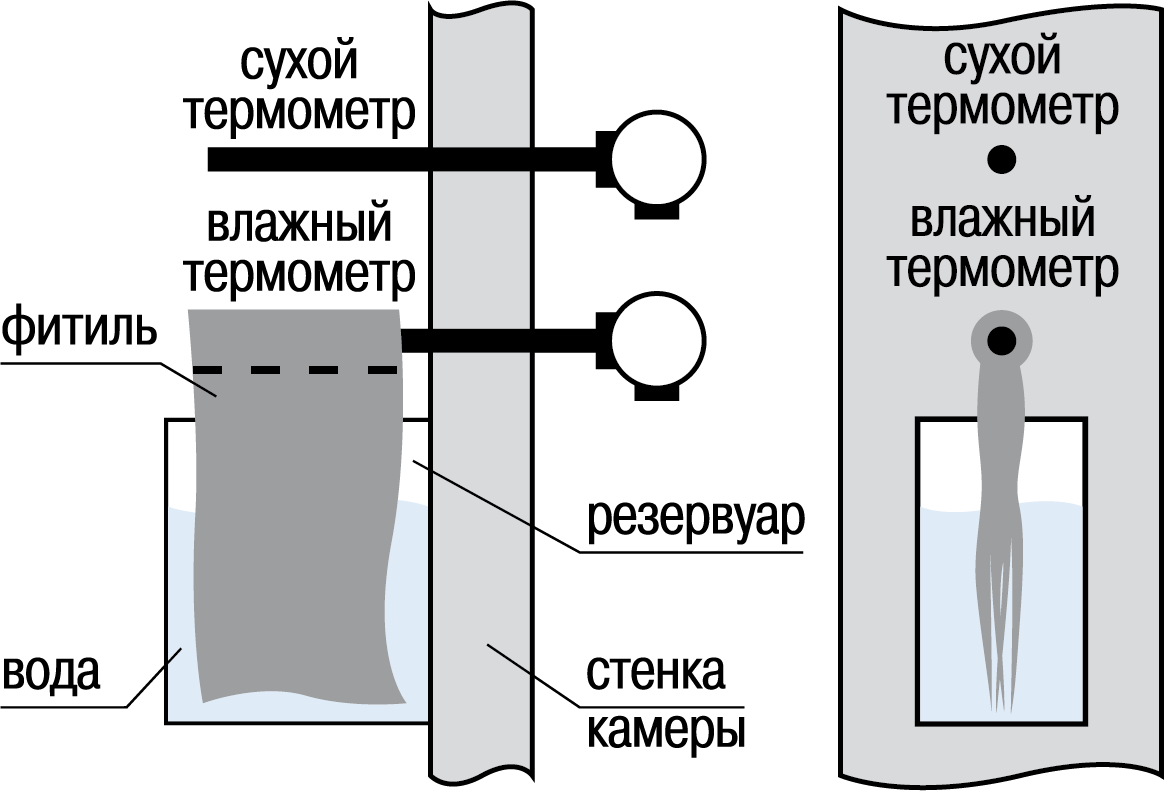
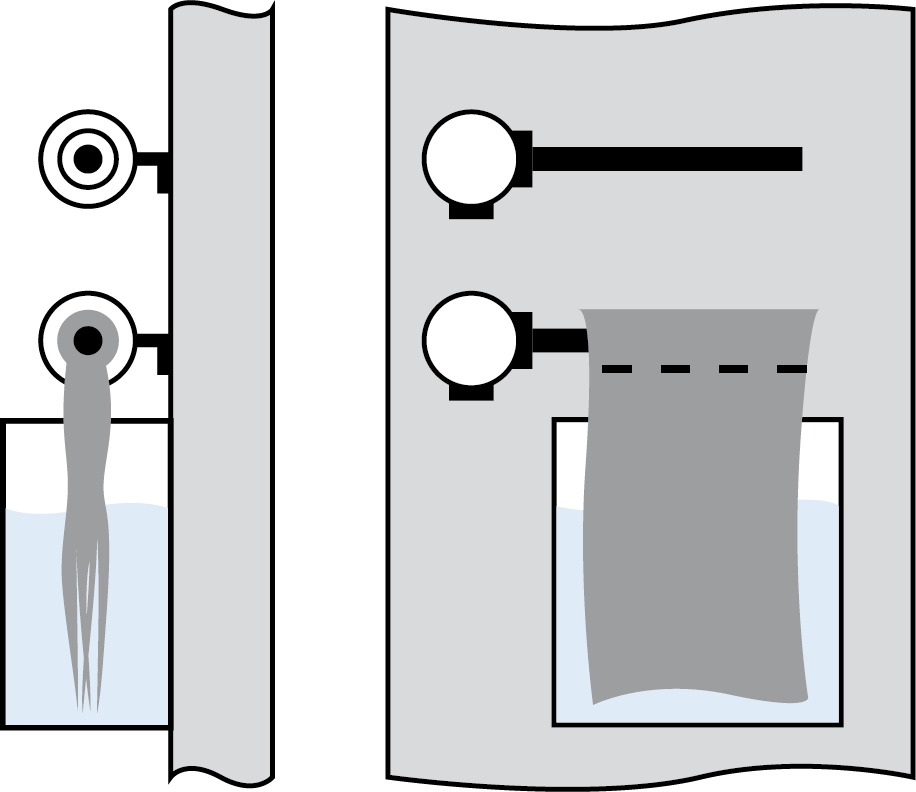
Резервуар изготавливается из нержавеющей стали, оцинкованного железа, термостойкой пластмассы, стекла или другого стойкого к условиям эксплуатации материала, не выделяющего вредных вещества.
Увлажняющий фитиль рекомендуется изготавливать из тонких неотбеленных хлопчатобумажных тканей — марли, батиста, муслина, — обладающих максимальной всасывающей способностью. Фитиль должен закрывать чувствительный элемент и максимальную площадь поверхности датчика.
Для снижения площади испарения воды из резервуара рекомендуется «бутылочный» профиль резервуара. Для пополнения резервуара можно смонтировать вне камеры дополнительный резервуар и соединить с внутренним (см. рисунки ниже).

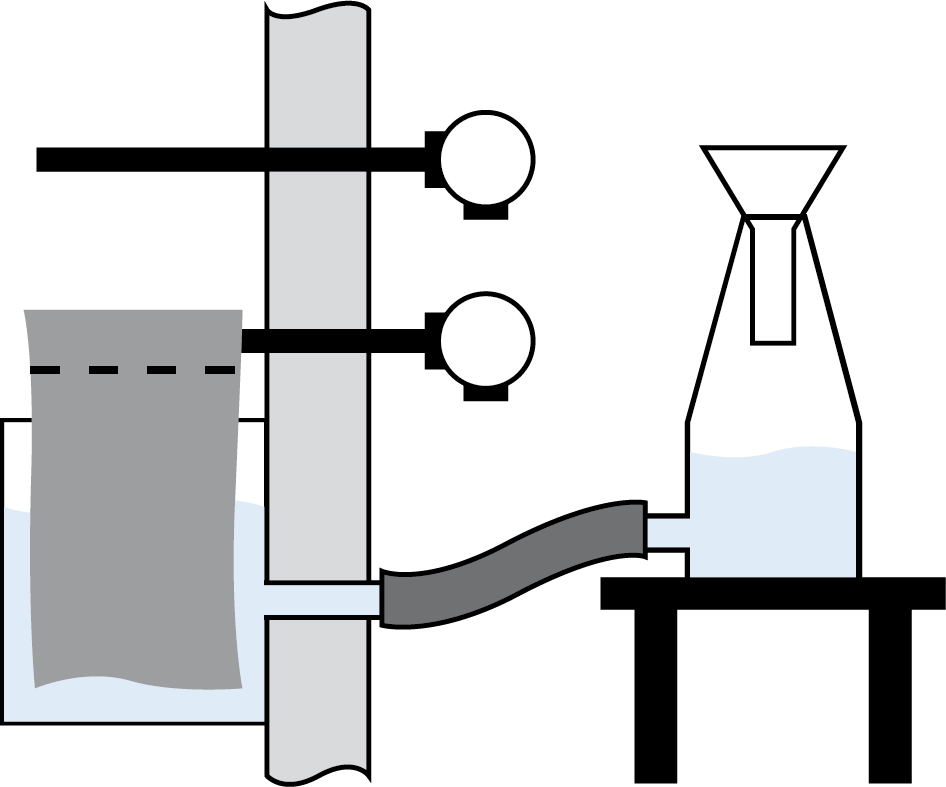
Параметры, доступные по сети
Функции чтения Modbus:
0х03 (read holding registers);
0х04 (read input registers).
Функции записи Modbus:
0х06 (preset single register);
0х10 (preset multiple registers).
Поддерживаемые типы данных:
int - беззнаковое целое (2 байта), на каждый параметр отводится один регистр Modbus;
float - с плавающей точкой (4 байта), занимает два соседних регистра Modbus.
Типы доступа: R - только чтение, R/W - чтение/запись.
Оперативные параметры
Оперативные параметры
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | |
|---|---|---|---|---|---|---|
Чтение | Запись | |||||
1 | Измеритель 1 | float | R | 0x0000 | 03/04 | — |
2 | Измеритель 2 | float | R | 0x0002 | ||
3 | Измеритель 3 | float | R | 0x0004 | ||
4 | Измеритель 4 | float | R | 0x0006 | ||
5 | Измеритель 5 | float | R | 0x0008 | ||
6 | Измеритель 6 | float | R | 0x000A | ||
7 | Измеритель 7 | float | R | 0x000C | ||
8 | Измеритель 8 | float | R | 0x000E | ||
9 | Вычислитель 1 | float | R | 0x0020 | 03/04 | — |
10 | Вычислитель 2 | float | R | 0x0022 | ||
11 | Вычислитель 3 | float | R | 0x0024 | ||
12 | Вычислитель 4 | float | R | 0x0026 | ||
13 | Вычислитель 5 | float | R | 0x0028 | ||
14 | Вычислитель 6 | float | R | 0x002A | ||
15 | Вычислитель 7 | float | R | 0x002C | ||
16 | Вычислитель 8 | float | R | 0x002E | ||
17 | Состояние ВУ 1 | float | R | 0x0040 | 03/04 | — |
18 | Состояние ВУ 2 | float | R | 0x0042 | ||
19 | Состояние ВУ 3 | float | R | 0x0044 | ||
20 | Состояние ВУ 4 | float | R | 0x0046 | ||
21 | Состояние ВУ 5 | float | R | 0x0048 | ||
22 | Состояние ВУ 6 | float | R | 0x004A | ||
23 | Состояние ВУ 7 | float | R | 0x004C | ||
24 | Состояние ВУ 8 | float | R | 0x004E | ||
25 | Состояние объекта 1 | int | R/W | 0x0060 | 03/04 | 06/10 |
26 | Состояние объекта 2 | int | R/W | 0x0061 | ||
27 | Состояние объекта 3 | int | R/W | 0x0062 | ||
28 | Состояние объекта 4 | int | R/W | 0x0063 | ||
29 | Состояние объекта 5 | int | R/W | 0x0064 | ||
30 | Состояние объекта 6 | int | R/W | 0x0065 | ||
31 | Состояние объекта 7 | int | R/W | 0x0066 | ||
32 | Состояние объекта 8 | int | R/W | 0x0067 | ||
33 | Уставка рассчетная канала 1 | float | R | 0x0080 | 03/04 | — |
34 | Уставка рассчетная канала 2 | float | R | 0x0082 | ||
35 | Уставка рассчетная канала 3 | float | R | 0x0084 | ||
36 | Уставка рассчетная канала 4 | float | R | 0x0086 | ||
37 | Уставка рассчетная канала 5 | float | R | 0x0088 | ||
38 | Уставка рассчетная канала 6 | float | R | 0x008A | ||
39 | Уставка рассчетная канала 7 | float | R | 0x008C | ||
40 | Уставка рассчетная канала 8 | float | R | 0x008E | ||
Параметры Входов
Параметры входов
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по протоколу ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Тип датчика 1 | int | R/W | 0x0100 | 03/04 | 10 | in-t |
2 | Тип датчика 2 | int | R/W | 0x0101 | |||
3 | Тип датчика 3 | int | R/W | 0x0102 | |||
4 | Тип датчика 4 | int | R/W | 0x0103 | |||
5 | Тип датчика 5 | int | R/W | 0x0104 | |||
6 | Тип датчика 6 | int | R/W | 0x0105 | |||
7 | Тип датчика 7 | int | R/W | 0x0106 | |||
8 | Тип датчика 8 | int | R/W | 0x0107 | |||
9 | Постоянная времени фильтра 1 | int | R/W | 0x0110 | 03/04 | 10 | in.Fd |
10 | Постоянная времени фильтра 2 | int | R/W | 0x0111 | |||
11 | Постоянная времени фильтра 3 | int | R/W | 0x0112 | |||
12 | Постоянная времени фильтра 4 | int | R/W | 0x0113 | |||
13 | Постоянная времени фильтра 5 | int | R/W | 0x0114 | |||
14 | Постоянная времени фильтра 6 | int | R/W | 0x0115 | |||
15 | Постоянная времени фильтра 7 | int | R/W | 0x0116 | |||
16 | Постоянная времени фильтра 8 | int | R/W | 0x0117 | |||
17 | Полоса фильтра 1 | float | R/W | 0x0120 | 03/04 | 10 | in.FG |
18 | Полоса фильтра 2 | float | R/W | 0x0122 | |||
19 | Полоса фильтра 3 | float | R/W | 0x0124 | |||
20 | Полоса фильтра 4 | float | R/W | 0x0126 | |||
21 | Полоса фильтра 5 | float | R/W | 0x0128 | |||
22 | Полоса фильтра 6 | float | R/W | 0x012A | |||
23 | Полоса фильтра 7 | float | R/W | 0x012C | |||
24 | Полоса фильтра 8 | float | R/W | 0x012E | |||
25 | Период опроса датчика 1 | float | R/W | 0x0130 | 03/04 | 10 | itrL |
26 | Период опроса датчика 2 | float | R/W | 0x0132 | |||
27 | Период опроса датчика 3 | float | R/W | 0x0134 | |||
28 | Период опроса датчика 4 | float | R/W | 0x0136 | |||
29 | Период опроса датчика 5 | float | R/W | 0x0138 | |||
30 | Период опроса датчика 6 | float | R/W | 0x013A | |||
31 | Период опроса датчика 7 | float | R/W | 0x013C | |||
32 | Период опроса датчика 8 | float | R/W | 0x013E | |||
33 | Сдвиг характеристики 1 | float | R/W | 0x0140 | 03/04 | 10 | in.SH |
34 | Сдвиг характеристики 2 | float | R/W | 0x0142 | |||
35 | Сдвиг характеристики 3 | float | R/W | 0x0144 | |||
36 | Сдвиг характеристики 4 | float | R/W | 0x0146 | |||
37 | Сдвиг характеристики 5 | float | R/W | 0x0148 | |||
38 | Сдвиг характеристики 6 | float | R/W | 0x014A | |||
39 | Сдвиг характеристики 7 | float | R/W | 0x014C | |||
40 | Сдвиг характеристики 8 | float | R/W | 0x014E | |||
41 | Наклон характеристики 1 | float | R/W | 0x0150 | 03/04 | 10 | in.SL |
42 | Наклон характеристики 2 | float | R/W | 0x0152 | |||
43 | Наклон характеристики 3 | float | R/W | 0x0154 | |||
44 | Наклон характеристики 4 | float | R/W | 0x0156 | |||
45 | Наклон характеристики 5 | float | R/W | 0x0158 | |||
46 | Наклон характеристики 6 | float | R/W | 0x015A | |||
47 | Наклон характеристики 7 | float | R/W | 0x015C | |||
48 | Наклон характеристики 8 | float | R/W | 0x015E | |||
49 | Нижняя граница диапазона измерения 1 | float | R/W | 0x0160 | 03/04 | 10 | Ain.L |
50 | Нижняя граница диапазона измерения 2 | float | R/W | 0x0162 | |||
51 | Нижняя граница диапазона измерения 3 | float | R/W | 0x0164 | |||
52 | Нижняя граница диапазона измерения 4 | float | R/W | 0x0166 | |||
53 | Нижняя граница диапазона измерения 5 | float | R/W | 0x0168 | |||
54 | Нижняя граница диапазона измерения 6 | float | R/W | 0x016A | |||
55 | Нижняя граница диапазона измерения 7 | float | R/W | 0x016C | |||
56 | Нижняя граница диапазона измерения 8 | float | R/W | 0x016E | |||
57 | Верхняя граница диапазона измерения 1 | float | R/W | 0x0170 | 03/04 | 10 | Ain.H |
58 | Верхняя граница диапазона измерения 2 | float | R/W | 0x0172 | |||
59 | Верхняя граница диапазона измерения 3 | float | R/W | 0x0174 | |||
60 | Верхняя граница диапазона измерения 4 | float | R/W | 0x0176 | |||
61 | Верхняя граница диапазона измерения 5 | float | R/W | 0x0178 | |||
62 | Верхняя граница диапазона измерения 6 | float | R/W | 0x017A | |||
63 | Верхняя граница диапазона измерения 7 | float | R/W | 0x017C | |||
64 | Верхняя граница диапазона измерения 8 | float | R/W | 0x017E | |||
Параметры Вычислителя
Параметры Вычислителя
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Психрометрический коэффициент влажности 1 | float | R/W | 0x0200 | 03/04 | 06/10 | A.ist |
2 | Психрометрический коэффициент влажности 2 | float | R/W | 0x0202 | |||
3 | Психрометрический коэффициент влажности 3 | float | R/W | 0x0204 | |||
4 | Психрометрический коэффициент влажности 4 | float | R/W | 0x0206 | |||
5 | Психрометрический коэффициент влажности 5 | float | R/W | 0x0208 | |||
6 | Психрометрический коэффициент влажности 6 | float | R/W | 0x020А | |||
7 | Психрометрический коэффициент влажности 7 | float | R/W | 0x020С | |||
8 | Психрометрический коэффициент влажности 8 | float | R/W | 0x020E | |||
Параметры Регулятора
Параметры Регулятора
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Режим работы регулятора 1 | int | R/W | 0x0300 | 03/04 | 06/10 | rEG.t |
2 | Режим работы регулятора 2 | int | R/W | 0x0301 | |||
3 | Режим работы регулятора 3 | int | R/W | 0x0302 | |||
4 | Режим работы регулятора 4 | int | R/W | 0x0303 | |||
5 | Режим работы регулятора 5 | int | R/W | 0x0304 | |||
6 | Режим работы регулятора 6 | int | R/W | 0x0305 | |||
7 | Режим работы регулятора 7 | int | R/W | 0x0306 | |||
8 | Режим работы регулятора 8 | int | R/W | 0x0307 | |||
9 | Контроль LBA регулятора 1 | int | R/W | 0x0310 | 03/04 | 06/10 | LBA |
10 | Контроль LBA регулятора 2 | int | R/W | 0x0311 | |||
11 | Контроль LBA регулятора 3 | int | R/W | 0x0312 | |||
12 | Контроль LBA регулятора 4 | int | R/W | 0x0313 | |||
13 | Контроль LBA регулятора 5 | int | R/W | 0x0314 | |||
14 | Контроль LBA регулятора 6 | int | R/W | 0x0315 | |||
15 | Контроль LBA регулятора 7 | int | R/W | 0x0316 | |||
16 | Контроль LBA регулятора 8 | int | R/W | 0x0317 | |||
17 | Полоса пропорциональности регулятора 1 | float | R/W | 0x0320 | 03/04 | 06/10 | Pb |
18 | Полоса пропорциональности регулятора 2 | float | R/W | 0x0322 | |||
19 | Полоса пропорциональности регулятора 3 | float | R/W | 0x0324 | |||
20 | Полоса пропорциональности регулятора 4 | float | R/W | 0x0326 | |||
21 | Полоса пропорциональности регулятора 5 | float | R/W | 0x0328 | |||
22 | Полоса пропорциональности регулятора 6 | float | R/W | 0x032A | |||
23 | Полоса пропорциональности регулятора 7 | float | R/W | 0x032C | |||
24 | Полоса пропорциональности регулятора 8 | float | R/W | 0x032E | |||
25 | Постоянная интегрирования регулятора 1 | int | R/W | 0x0330 | 03/04 | 06/10 | ti |
26 | Постоянная интегрирования регулятора 2 | int | R/W | 0x0331 | |||
27 | Постоянная интегрирования регулятора 3 | int | R/W | 0x0332 | |||
28 | Постоянная интегрирования регулятора 4 | int | R/W | 0x0333 | |||
29 | Постоянная интегрирования регулятора 5 | int | R/W | 0x0334 | |||
30 | Постоянная интегрирования регулятора 6 | int | R/W | 0x0335 | |||
31 | Постоянная интегрирования регулятора 7 | int | R/W | 0x0336 | |||
32 | Постоянная интегрирования регулятора 8 | int | R/W | 0x0337 | |||
33 | Отношение ti/td регулятора 1 | float | R/W | 0x0340 | 03/04 | 06/10 | td.ti |
34 | Отношение ti/td регулятора 2 | float | R/W | 0x0342 | |||
35 | Отношение ti/td регулятора 3 | float | R/W | 0x0344 | |||
36 | Отношение ti/td регулятора 4 | float | R/W | 0x0346 | |||
37 | Отношение ti/td регулятора 5 | float | R/W | 0x0348 | |||
38 | Отношение ti/td регулятора 6 | float | R/W | 0x034A | |||
39 | Отношение ti/td регулятора 7 | float | R/W | 0x034C | |||
40 | Отношение ti/td регулятора 8 | float | R/W | 0x034E | |||
41 | Ограничение максимума интеграла регулятора 1 | float | R/W | 0x0350 | 03/04 | 06/10 | i.Upr |
42 | Ограничение максимума интеграла регулятора 2 | float | R/W | 0x0352 | |||
43 | Ограничение максимума интеграла регулятора 3 | float | R/W | 0x0354 | |||
44 | Ограничение максимума интеграла регулятора 4 | float | R/W | 0x0356 | |||
45 | Ограничение максимума интеграла регулятора 5 | float | R/W | 0x0358 | |||
46 | Ограничение максимума интеграла регулятора 6 | float | R/W | 0x035A | |||
47 | Ограничение максимума интеграла регулятора 7 | float | R/W | 0x035C | |||
48 | Ограничение максимума интеграла регулятора 8 | float | R/W | 0x035E | |||
49 | Ограничение минимума интеграла регулятора 1 | float | R/W | 0x0360 | 03/04 | 06/10 | i.min |
50 | Ограничение минимума интеграла регулятора 2 | float | R/W | 0x0362 | |||
51 | Ограничение минимума интеграла регулятора 3 | float | R/W | 0x0364 | |||
52 | Ограничение минимума интеграла регулятора 4 | float | R/W | 0x0366 | |||
53 | Ограничение минимума интеграла регулятора 5 | float | R/W | 0x0368 | |||
54 | Ограничение минимума интеграла регулятора 6 | float | R/W | 0x036A | |||
55 | Ограничение минимума интеграла регулятора 7 | float | R/W | 0x036C | |||
56 | Ограничение минимума интеграла регулятора 8 | float | R/W | 0x036E | |||
57 | Гистерезис двухпозиционного регулятора 1 | float | R/W | 0x0370 | 03/04 | 06/10 | HYS.C |
58 | Гистерезис двухпозиционного регулятора 2 | float | R/W | 0x0372 | |||
59 | Гистерезис двухпозиционного регулятора 3 | float | R/W | 0x0374 | |||
60 | Гистерезис двухпозиционного регулятора 4 | float | R/W | 0x0376 | |||
61 | Гистерезис двухпозиционного регулятора 5 | float | R/W | 0x0378 | |||
62 | Гистерезис двухпозиционного регулятора 6 | float | R/W | 0x037A | |||
63 | Гистерезис двухпозиционного регулятора 7 | float | R/W | 0x037C | |||
64 | Гистерезис двухпозиционного регулятора 8 | float | R/W | 0x037E | |||
Параметры ПС
Параметры ПС
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Максимально допустимая скорость изменения выходного сигнала 1 | float | R/W | 0x0400 | 03/04 | 06/10 | P.rES |
2 | Максимально допустимая скорость изменения выходного сигнала 2 | float | R/W | 0x0402 | |||
3 | Максимально допустимая скорость изменения выходного сигнала 3 | float | R/W | 0x0404 | |||
4 | Максимально допустимая скорость изменения выходного сигнала 4 | float | R/W | 0x0406 | |||
5 | Максимально допустимая скорость изменения выходного сигнала 5 | float | R/W | 0x0408 | |||
6 | Максимально допустимая скорость изменения выходного сигнала 6 | float | R/W | 0x040A | |||
7 | Максимально допустимая скорость изменения выходного сигнала 7 | float | R/W | 0x040C | |||
8 | Максимально допустимая скорость изменения выходного сигнала 8 | float | R/W | 0x040E | |||
9 | Ограничение максимального значения выходного сигнала 1 | float | R/W | 0x0410 | 03/04 | 06/10 | P.Upr |
10 | Ограничение максимального значения выходного сигнала 2 | float | R/W | 0x0412 | |||
11 | Ограничение максимального значения выходного сигнала 3 | float | R/W | 0x0414 | |||
12 | Ограничение максимального значения выходного сигнала 4 | float | R/W | 0x0416 | |||
13 | Ограничение максимального значения выходного сигнала 5 | float | R/W | 0x0418 | |||
14 | Ограничение максимального значения выходного сигнала 6 | float | R/W | 0x041A | |||
15 | Ограничение максимального значения выходного сигнала 7 | float | R/W | 0x041C | |||
16 | Ограничение максимального значения выходного сигнала 8 | float | R/W | 0x041E | |||
17 | Ограничение минимального значения выходного сигнала 1 | float | R/W | 0x0420 | 03/04 | 06/10 | P.min |
18 | Ограничение минимального значения выходного сигнала 2 | float | R/W | 0x0422 | |||
19 | Ограничение минимального значения выходного сигнала 3 | float | R/W | 0x0424 | |||
20 | Ограничение минимального значения выходного сигнала 4 | float | R/W | 0x0426 | |||
21 | Ограничение минимального значения выходного сигнала 5 | float | R/W | 0x0428 | |||
22 | Ограничение минимального значения выходного сигнала 6 | float | R/W | 0x042A | |||
23 | Ограничение минимального значения выходного сигнала 7 | float | R/W | 0x042C | |||
24 | Ограничение минимального значения выходного сигнала 8 | float | R/W | 0x042E | |||
Параметры БУИМ
Параметры БУИМ
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Наличие ДПЗ БУИМ1 | int | R/W | 0x0500 | 03/04 | 06/10 | dLP |
2 | Наличие ДПЗ БУИМ2 | int | R/W | 0x0501 | |||
3 | Наличие ДПЗ БУИМ3 | int | R/W | 0x0502 | |||
4 | Наличие ДПЗ БУИМ4 | int | R/W | 0x0503 | |||
5 | Наличие ДПЗ БУИМ5 | int | R/W | 0x0504 | |||
6 | Наличие ДПЗ БУИМ6 | int | R/W | 0x0505 | |||
7 | Наличие ДПЗ БУИМ7 | int | R/W | 0x0506 | |||
8 | Наличие ДПЗ БУИМ8 | int | R/W | 0x0507 | |||
9 | Зона нечувствительности для задвижки БУИМ1 | float | R/W | 0x0510 | 03/04 | 06/10 | db.F |
10 | Зона нечувствительности для задвижки БУИМ2 | float | R/W | 0x0512 | |||
11 | Зона нечувствительности для задвижки БУИМ3 | float | R/W | 0x0514 | |||
12 | Зона нечувствительности для задвижки БУИМ4 | float | R/W | 0x0516 | |||
13 | Зона нечувствительности для задвижки БУИМ5 | float | R/W | 0x0518 | |||
14 | Зона нечувствительности для задвижки БУИМ6 | float | R/W | 0x051A | |||
15 | Зона нечувствительности для задвижки БУИМ7 | float | R/W | 0x051C | |||
16 | Зона нечувствительности для задвижки БУИМ8 | float | R/W | 0x051E | |||
17 | Мин. время останова задвижки БУИМ1 | int | R/W | 0x0520 | 03/04 | 06/10 | t.StP |
18 | Мин. время останова задвижки БУИМ2 | int | R/W | 0x0521 | |||
19 | Мин. время останова задвижки БУИМ3 | int | R/W | 0x0522 | |||
20 | Мин. время останова задвижки БУИМ4 | int | R/W | 0x0523 | |||
21 | Мин. время останова задвижки БУИМ5 | int | R/W | 0x0524 | |||
22 | Мин. время останова задвижки БУИМ6 | int | R/W | 0x0525 | |||
23 | Мин. время останова задвижки БУИМ7 | int | R/W | 0x0526 | |||
24 | Мин. время останова задвижки БУИМ8 | int | R/W | 0x0527 | |||
25 | Мин. время работы задвижки 1 | Float | R/W | 0x0530 | 03/04 | 06/10 | tP.L |
26 | Мин. время работы задвижки 2 | Float | R/W | 0x0532 | |||
27 | Мин. время работы задвижки 3 | Float | R/W | 0x0534 | |||
28 | Мин. время работы задвижки 4 | Float | R/W | 0x0536 | |||
29 | Мин. время работы задвижки 5 | Float | R/W | 0x0538 | |||
30 | Мин. время работы задвижки 6 | Float | R/W | 0x053A | |||
31 | Мин. время работы задвижки 7 | Float | R/W | 0x053C | |||
32 | Мин. время работы задвижки 8 | Float | R/W | 0x053E | |||
33 | Полное время хода КЗР 1 | int | R/W | 0x0540 | 03/04 | 06/10 | tP.H |
34 | Полное время хода КЗР 2 | int | R/W | 0x0541 | |||
35 | Полное время хода КЗР 3 | int | R/W | 0x0542 | |||
36 | Полное время хода КЗР 4 | int | R/W | 0x0543 | |||
37 | Полное время хода КЗР 5 | int | R/W | 0x0544 | |||
38 | Полное время хода КЗР 6 | int | R/W | 0x0545 | |||
39 | Полное время хода КЗР 7 | int | R/W | 0x0546 | |||
40 | Полное время хода КЗР 8 | int | R/W | 0x0547 | |||
41 | Время выборки люфта 1 | float | R/W | 0x0550 | 03/04 | 06/10 | tFP |
42 | Время выборки люфта 2 | float | R/W | 0x0552 | |||
43 | Время выборки люфта 3 | float | R/W | 0x0554 | |||
44 | Время выборки люфта 4 | float | R/W | 0x0556 | |||
45 | Время выборки люфта 5 | float | R/W | 0x0558 | |||
46 | Время выборки люфта 6 | float | R/W | 0x055A | |||
47 | Время выборки люфта 7 | float | R/W | 0x055C | |||
48 | Время выборки люфта 8 | float | R/W | 0x055E | |||
49 | Исходное положение КЗР 1 | float | R/W | 0x0560 | 03/04 | 06/10 | LSP |
50 | Исходное положение КЗР 2 | float | R/W | 0x0562 | |||
51 | Исходное положение КЗР 3 | float | R/W | 0x0564 | |||
52 | Исходное положение КЗР 4 | float | R/W | 0x0566 | |||
53 | Исходное положение КЗР 5 | float | R/W | 0x0568 | |||
54 | Исходное положение КЗР 6 | float | R/W | 0x056A | |||
55 | Исходное положение КЗР 7 | float | R/W | 0x056C | |||
56 | Исходное положение КЗР 8 | float | R/W | 0x056E | |||
Параметры ВУ
Параметры ВУ
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Период ШИМ при регулировании 1 | int | R/W | 0x0600 | 03/04 | 06/10 | tHP |
2 | Период ШИМ при регулировании 2 | int | R/W | 0x0601 | |||
3 | Период ШИМ при регулировании 3 | int | R/W | 0x0602 | |||
4 | Период ШИМ при регулировании 4 | int | R/W | 0x0603 | |||
5 | Период ШИМ при регулировании 5 | int | R/W | 0x0604 | |||
6 | Период ШИМ при регулировании 6 | int | R/W | 0x0605 | |||
7 | Период ШИМ при регулировании 7 | int | R/W | 0x0606 | |||
8 | Период ШИМ при регулировании 8 | int | R/W | 0x0607 | |||
9 | Минимальная длительность импульса при ШИМ 1 | float | R/W | 0x0610 | 03/04 | 06/10 | t.L |
10 | Минимальная длительность импульса при ШИМ 2 | float | R/W | 0x0612 | |||
11 | Минимальная длительность импульса при ШИМ 3 | float | R/W | 0x0614 | |||
12 | Минимальная длительность импульса при ШИМ 4 | float | R/W | 0x0616 | |||
13 | Минимальная длительность импульса при ШИМ 5 | float | R/W | 0x0618 | |||
14 | Минимальная длительность импульса при ШИМ 6 | float | R/W | 0x061A | |||
15 | Минимальная длительность импульса при ШИМ 7 | float | R/W | 0x061C | |||
16 | Минимальная длительность импульса при ШИМ 8 | float | R/W | 0x061E | |||
Сетевые параметры
Сетевые параметры
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Скорость | int | R/W | 0x1000 | 03/04 | 06/10 | bPS |
2 | Длина сетевого адреса | int | R/W | 0x1004 | A.Len | ||
3 | Базовый адрес | int | R/W | 0x1005 | Addr | ||
4 | Задержка ответа | int | R/W | 0x1006 | Rs.dl | ||
5 | Длина слова данных | int | R/W | 0x1001 | LEn | ||
6 | Контроль четности | int | R/W | 0x1002 | PrtY | ||
7 | Количество стоп-бит | int | R/W | 0x1003 | Sbit | ||
8 | Команда смены сетевых настроек | int | R | 0x1010 | — | — | |
Параметры Уставок
Параметры Уставок
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Коррекция уставки (режим Работа) канал 1 | int | R/W | 0x0700 | 03/04 | 06/10 | or.SP |
2 | Коррекция уставки (режим Останов) канал 1 | int | R/W | 0x0701 | |||
3 | Коррекция уставки (режим Авария) канал 1 | int | R/W | 0x0702 | |||
4 | Коррекция уставки (режим Работа) канал 2 | int | R/W | 0x0703 | |||
5 | Коррекция уставки (режим Останов) канал 2 | int | R/W | 0x0704 | |||
6 | Коррекция уставки (режим Авария) канал 2 | int | R/W | 0x0705 | |||
7 | Коррекция уставки (режим Работа) канал 3 | int | R/W | 0x0706 | |||
8 | Коррекция уставки (режим Останов) канал 3 | int | R/W | 0x0707 | |||
9 | Коррекция уставки (режим Авария) канал 3 | int | R/W | 0x0708 | |||
10 | Коррекция уставки (режим Работа) канал 4 | int | R/W | 0x0709 | |||
11 | Коррекция уставки (режим Останов) канал 4 | int | R/W | 0x070A | |||
12 | Коррекция уставки (режим Авария) канал 4 | int | R/W | 0x070B | |||
13 | Коррекция уставки (режим Работа) канал 5 | int | R/W | 0x070C | |||
14 | Коррекция уставки (режим Останов) канал 5 | int | R/W | 0x070D | |||
15 | Коррекция уставки (режим Авария) канал 5 | int | R/W | 0x070E | |||
16 | Коррекция уставки (режим Работа) канал 6 | int | R/W | 0x070F | |||
17 | Коррекция уставки (режим Останов) канал 6 | int | R/W | 0x0710 | |||
18 | Коррекция уставки (режим Авария) канал 6 | int | R/W | 0x0711 | |||
19 | Коррекция уставки (режим Работа) канал 7 | int | R/W | 0x0712 | |||
20 | Коррекция уставки (режим Останов) канал 7 | int | R/W | 0x0713 | |||
21 | Коррекция уставки (режим Авария) канал 7 | int | R/W | 0x0714 | |||
22 | Коррекция уставки (режим Работа) канал 8 | int | R/W | 0x0715 | |||
23 | Коррекция уставки (режим Останов) канал 8 | int | R/W | 0x0716 | |||
24 | Коррекция уставки (режим Авария) канал 8 | int | R/W | 0x0717 | |||
25 | Скорость измен уст (режим Работа) канал 1 | float | R/W | 0x0720 | 03/04 | 06/10 | LF.LU |
26 | Скорость измен уст (режим Останов) канал 1 | float | R/W | 0x0722 | |||
27 | Скорость измен уст (режим Авария) канал 1 | float | R/W | 0x0724 | |||
28 | Скорость измен уст (режим Работа) канал 2 | float | R/W | 0x0726 | |||
29 | Скорость измен уст (режим Останов) канал 2 | float | R/W | 0x0728 | |||
30 | Скорость измен уст (режим Авария) канал 2 | float | R/W | 0x072A | |||
31 | Скорость измен уст (режим Работа) канал 3 | float | R/W | 0x072C | |||
32 | Скорость измен уст (режим Останов) канал 3 | float | R/W | 0x072E | |||
33 | Скорость измен уст (режим Авария) канал 3 | float | R/W | 0x0730 | |||
34 | Скорость измен уст (режим Работа) канал 4 | float | R/W | 0x0732 | |||
35 | Скорость измен уст (режим Останов) канал 4 | float | R/W | 0x0734 | |||
36 | Скорость измен уст (режим Авария) канал 4 | float | R/W | 0x0736 | |||
37 | Скорость измен уст (режим Работа) канал 5 | float | R/W | 0x0738 | |||
38 | Скорость измен уст (режим Останов) канал 5 | float | R/W | 0x073A | |||
39 | Скорость измен уст (режим Авария) канал 5 | float | R/W | 0x073C | |||
40 | Скорость измен уст (режим Работа) канал 6 | float | R/W | 0x073E | |||
41 | Скорость измен уст (режим Останов) канал 6 | float | R/W | 0x0740 | |||
42 | Скорость измен уст (режим Авария) канал 6 | float | R/W | 0x0742 | |||
43 | Скорость измен уст (режим Работа) канал 7 | float | R/W | 0x0744 | |||
44 | Скорость измен уст (режим Останов) канал 7 | float | R/W | 0x0746 | |||
45 | Скорость измен уст (режим Авария) канал 7 | float | R/W | 0x0748 | |||
46 | Скорость измен уст (режим Работа) канал 8 | float | R/W | 0x074A | |||
47 | Скорость измен уст (режим Останов) канал 8 | float | R/W | 0x074C | |||
48 | Скорость измен уст (режим Авария) канал 8 | float | R/W | 0x074E | 03/04 | 06/10 | SP.LU |
49 | Уставка (режим Работа) канал 1 | float | R/W | 0x0750 | |||
50 | Уставка (режим Останов) канал 1 | float | R/W | 0x0752 | |||
51 | Уставка (режим Авария) канал 1 | float | R/W | 0x0754 | |||
52 | Уставка (режим Работа) канал 2 | float | R/W | 0x0756 | |||
53 | Уставка (режим Останов) канал 2 | float | R/W | 0x0758 | |||
54 | Уставка (режим Авария) канал 2 | float | R/W | 0x075A | |||
55 | Уставка (режим Работа) канал 3 | float | R/W | 0x075C | |||
56 | Уставка (режим Останов) канал 3 | float | R/W | 0x075E | |||
57 | Уставка (режим Авария) канал 3 | float | R/W | 0x0760 | |||
58 | Уставка (режим Работа) канал 4 | float | R/W | 0x0762 | |||
59 | Уставка (режим Останов) канал 4 | float | R/W | 0x0764 | |||
60 | Уставка (режим Авария) канал 4 | float | R/W | 0x0766 | |||
61 | Уставка (режим Работа) канал 5 | float | R/W | 0x0768 | |||
62 | Уставка (режим Останов) канал 5 | float | R/W | 0x076A | |||
63 | Уставка (режим Авария) канал 5 | float | R/W | 0x076C | |||
64 | Уставка (режим Работа) канал 6 | float | R/W | 0x076E | |||
65 | Уставка (режим Останов) канал 6 | float | R/W | 0x0770 | |||
66 | Уставка (режим Авария) канал 6 | float | R/W | 0x0772 | |||
67 | Уставка (режим Работа) канал 7 | float | R/W | 0x0774 | |||
68 | Уставка (режим Останов) канал 7 | float | R/W | 0x0776 | |||
69 | Уставка (режим Авария) канал 7 | float | R/W | 0x0778 | |||
70 | Уставка (режим Работа) канал 8 | float | R/W | 0x077A | |||
71 | Уставка (режим Останов) канал 8 | float | R/W | 0x077C | |||
72 | Уставка (режим Авария) канал 8 | float | R/W | 0x077E | |||
73 | Нижняя граница задания уставки (режим Работа) канал 1 | float | R/W | 0x0780 | 03/04 | 06/10 | b.CH.L |
74 | Нижняя граница задания уставки (режим Останов) канал 1 | float | R/W | 0x0782 | |||
75 | Нижняя граница задания уставки (режим Авария) канал 1 | float | R/W | 0x0784 | |||
76 | Нижняя граница задания уставки (режим Работа) канал 2 | float | R/W | 0x0786 | |||
77 | Нижняя граница задания уставки (режим Останов) канал 2 | float | R/W | 0x0788 | |||
78 | Нижняя граница задания уставки (режим Авария) канал 2 | float | R/W | 0x078A | |||
79 | Нижняя граница задания уставки (режим Работа) канал 3 | float | R/W | 0x078C | |||
80 | Нижняя граница задания уставки (режим Останов) канал 3 | float | R/W | 0x078E | |||
81 | Нижняя граница задания уставки (режим Авария) канал 3 | float | R/W | 0x0790 | |||
82 | Нижняя граница задания уставки (режим Работа) канал 4 | float | R/W | 0x0792 | |||
83 | Нижняя граница задания уставки (режим Останов) канал 4 | float | R/W | 0x0794 | |||
84 | Нижняя граница задания уставки (режим Авария) канал 4 | float | R/W | 0x0796 | |||
85 | Нижняя граница задания уставки (режим Работа) канал 5 | float | R/W | 0x0798 | |||
86 | Ниж граница задания уст (режим Останов) канал 5 | float | R/W | 0x079A | |||
87 | Ниж граница задания уст (режим Авария) канал 5 | float | R/W | 0x079C | |||
88 | Ниж граница задания уст (режим Работа) канал 6 | float | R/W | 0x079E | |||
89 | Ниж граница задания уст (режим Останов) канал 6 | float | R/W | 0x07A0 | |||
90 | Ниж граница задания уст (режим Авария) канал 6 | float | R/W | 0x07A2 | |||
91 | Ниж граница задания уст (режим Работа) канал 7 | float | R/W | 0x07A4 | |||
92 | Ниж граница задания уст (режим Останов) канал 7 | float | R/W | 0x07A6 | |||
93 | Ниж граница задания уст (режим Авария) канал 7 | float | R/W | 0x07A8 | |||
94 | Ниж граница задания уст (режим Работа) канал 8 | float | R/W | 0x07AA | |||
95 | Ниж граница задания уст (режим Останов) канал 8 | float | R/W | 0x07AC | |||
96 | Ниж граница задания уст (режим Авария) канал 8 | float | R/W | 0x07AE | |||
97 | Верх граница задания уст (режим Работа) канал 1 | float | R/W | 0x07B0 | 03/04 | 06/10 | b.CH.H |
98 | Верх граница задания уст (режим Останов) канал 1 | float | R/W | 0x07B2 | |||
99 | Верх граница задания уст (режим Авария) канал 1 | float | R/W | 0x07B4 | |||
100 | Верх граница задания уст (режим Работа) канал 2 | float | R/W | 0x07B6 | |||
101 | Верх граница задания уст (режим Останов) канал 2 | float | R/W | 0x07B8 | |||
102 | Верх граница задания уст (режим Авария) канал 2 | float | R/W | 0x07BA | |||
103 | Верх граница задания уст (режим Работа) канал 3 | float | R/W | 0x07BC | |||
104 | Верх граница задания уст (режим Останов) канал 3 | float | R/W | 0x07BE | |||
105 | Верх граница задания уст (режим Авария) канал 3 | float | R/W | 0x07C0 | |||
106 | Верх граница задания уст (режим Работа) канал 4 | float | R/W | 0x07C2 | |||
107 | Верх граница задания уст (режим Останов) канал 4 | float | R/W | 0x07C4 | |||
108 | Верх граница задания уст (режим Авария) канал 4 | float | R/W | 0x07C6 | |||
109 | Верх граница задания уст (режим Работа) канал 5 | float | R/W | 0x07C8 | |||
110 | Верх граница задания уст (режим Останов) канал 5 | float | R/W | 0x07CA | |||
111 | Верх граница задания уст (режим Авария) канал 5 | float | R/W | 0x07CC | |||
112 | Верх граница задания уст (режим Работа) канал 6 | float | R/W | 0x07CE | |||
113 | Верх граница задания уст (режим Останов) канал 6 | float | R/W | 0x07D0 | |||
114 | Верх граница задания уст (режим Авария) канал 6 | float | R/W | 0x07D2 | |||
115 | Верх граница задания уст (режим Работа) канал 7 | float | R/W | 0x07D4 | |||
116 | Верх граница задания уст (режим Останов) канал 7 | float | R/W | 0x07D6 | |||
117 | Верх граница задания уст (режим Авария) канал 7 | float | R/W | 0x07D8 | |||
118 | Верх граница задания уст (режим Работа) канал 8 | float | R/W | 0x07DA | |||
119 | Верх граница задания уст (режим Останов) канал 8 | float | R/W | 0x07DC | |||
120 | Верх граница задания уст (режим Авария) канал 8 | float | R/W | 0x07DE | |||
Параметры Регистратора
Параметры Регистратора
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Нижняя граница регистратора 1 | float | R/W | 0x0620 | 03/04 | 06/10 | Ao.L |
2 | Нижняя граница регистратора 2 | float | R/W | 0x0622 | |||
3 | Нижняя граница регистратора 3 | float | R/W | 0x0624 | |||
4 | Нижняя граница регистратора 4 | float | R/W | 0x0626 | |||
5 | Нижняя граница регистратора 5 | float | R/W | 0x0628 | |||
6 | Нижняя граница регистратора 6 | float | R/W | 0x062A | |||
7 | Нижняя граница регистратора 7 | float | R/W | 0x062C | |||
8 | Нижняя граница регистратора 8 | float | R/W | 0x062E | |||
9 | Верхняя граница регистратора 1 | float | R/W | 0x0630 | 03/04 | 06/10 | Ao.H |
10 | Верхняя граница регистратора 2 | float | R/W | 0x0632 | |||
11 | Верхняя граница регистратора 3 | float | R/W | 0x0634 | |||
12 | Верхняя граница регистратора 4 | float | R/W | 0x0636 | |||
13 | Верхняя граница регистратора 5 | float | R/W | 0x0638 | |||
14 | Верхняя граница регистратора 6 | float | R/W | 0x063A | |||
15 | Верхняя граница регистратора 7 | float | R/W | 0x063C | |||
16 | Верхняя граница регистратора 8 | float | R/W | 0x063E | |||
17 | Состояние при аварии регистратора 1 | int | R/W | 0x0640 | 03/04 | 06/10 | Er.St |
18 | Состояние при аварии регистратора 2 | int | R/W | 0x0641 | |||
19 | Состояние при аварии регистратора 3 | int | R/W | 0x0642 | |||
20 | Состояние при аварии регистратора 4 | int | R/W | 0x0643 | |||
21 | Состояние при аварии регистратора 5 | int | R/W | 0x0644 | |||
22 | Состояние при аварии регистратора 6 | int | R/W | 0x0645 | |||
23 | Состояние при аварии регистратора 7 | int | R/W | 0x0646 | |||
24 | Состояние при аварии регистратора 8 | int | R/W | 0x0647 | |||
Параметры LBA
Параметры LBA
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | Минимум необходимого изменения входной величины канала 1 | float | R/W | 0x0650 | 03/04 | 06/10 | d.LBA |
2 | Минимум необходимого изменения входной величины канала 2 | float | R/W | 0x0652 | |||
3 | Минимум необходимого изменения входной величины канала 3 | float | R/W | 0x0654 | |||
4 | Минимум необходимого изменения входной величины канала 4 | float | R/W | 0x0656 | |||
5 | Минимум необходимого изменения входной величины канала 5 | float | R/W | 0x0658 | |||
6 | Минимум необходимого изменения входной величины канала 6 | float | R/W | 0x065A | |||
7 | Минимум необходимого изменения входной величины канала 7 | float | R/W | 0x065C | |||
8 | Минимум необходимого изменения входной величины канала 8 | float | R/W | 0x065E | |||
9 | Время контроля канала 1 | int | R/W | 0x0660 | 03/04 | 06/10 | t.LBA |
10 | Время контроля канала 2 | int | R/W | 0x0661 | |||
11 | Время контроля канала 3 | int | R/W | 0x0662 | |||
12 | Время контроля канала 4 | int | R/W | 0x0663 | |||
13 | Время контроля канала 5 | int | R/W | 0x0664 | |||
14 | Время контроля канала 6 | int | R/W | 0x0665 | |||
15 | Время контроля канала 7 | int | R/W | 0x0666 | |||
16 | Время контроля канала 8 | int | R/W | 0x0667 | |||
Параметры Графиков
Параметры Графиков
№ | Название | Тип | Тип доступа | Адрес Modbus (hex) | Функции Modbus | Имя по ОВЕН | |
|---|---|---|---|---|---|---|---|
Чтение | Запись | ||||||
1 | X1 графика 1 | float | R/W | 0x0800 | 03/04 | 06/10 | absc |
2 | X2 графика 1 | float | R/W | 0x0802 | |||
3 | Х3 графика 1 | float | R/W | 0x0804 | |||
4 | Х4 графика 1 | float | R/W | 0x0806 | |||
5 | Х5 графика 1 | float | R/W | 0x0808 | |||
6 | Х6 графика 1 | float | R/W | 0x080A | |||
7 | Х7 графика 1 | float | R/W | 0x080C | |||
8 | Х8 графика 1 | float | R/W | 0x080E | |||
9 | Х9 графика 1 | float | R/W | 0x0810 | |||
10 | Х10 графика 1 | float | R/W | 0x0812 | |||
11 | X1 графика 2 | float | R/W | 0x0814 | |||
12 | X2 графика 2 | float | R/W | 0x0816 | |||
13 | Х3 графика 2 | float | R/W | 0x0818 | |||
14 | Х4 графика 2 | float | R/W | 0x081A | |||
15 | Х5 графика 2 | float | R/W | 0x081C | |||
16 | Х6 графика 2 | float | R/W | 0x081E | |||
17 | Х7 графика 2 | float | R/W | 0x0820 | |||
18 | Х8 графика 2 | float | R/W | 0x0822 | |||
19 | Х9 графика 2 | float | R/W | 0x0824 | |||
20 | Х10 графика 2 | float | R/W | 0x0826 | |||
21 | Y1 графика 1 | float | R/W | 0x0900 | 03/04 | 06/10 | ordn |
22 | Y2 графика 1 | float | R/W | 0x0902 | |||
23 | Y3 графика 1 | float | R/W | 0x0904 | |||
24 | Y4 графика 1 | float | R/W | 0x0906 | |||
25 | Y5 графика 1 | float | R/W | 0x0908 | |||
26 | Y6 графика 1 | float | R/W | 0x090A | |||
27 | Y7 графика 1 | float | R/W | 0x090C | |||
28 | Y8 графика 1 | float | R/W | 0x090E | |||
29 | Y9 графика 1 | float | R/W | 0x0910 | |||
30 | Y10 графика 1 | float | R/W | 0x0912 | |||
31 | Y1 графика 2 | float | R/W | 0x0914 | |||
32 | Y2 графика 2 | float | R/W | 0x0916 | |||
33 | Y3 графика 2 | float | R/W | 0x0918 | |||
34 | Y4 графика 2 | float | R/W | 0x091A | |||
35 | Y5 графика 2 | float | R/W | 0x091C | |||
36 | Y6 графика 2 | float | R/W | 0x091E | |||
37 | Y7 графика 2 | float | R/W | 0x0920 | |||
38 | Y8 графика 2 | float | R/W | 0x0922 | |||
39 | Y9 графика 2 | float | R/W | 0x0924 | |||
40 | Y10 графика 2 | float | R/W | 0x0926 | |||
Предупреждающие сообщения
В данном руководстве применяются следующие предупреждения:
Ключевое слово ОПАСНОСТЬ сообщает о непосредственной угрозе опасной ситуации, которая приведет к смерти или серьезной травме, если ее не предотвратить.
Ключевое слово ВНИМАНИЕ сообщает о потенциально опасной ситуации, которая может привести к небольшим травмам.
Ключевое слово ПРЕДУПРЕЖДЕНИЕ сообщает о потенциально опасной ситуации , которая может привести к повреждению имущества.
Ключевое слово ПРИМЕЧАНИЕ обращает внимание на полезные советы и рекомендации, а также информацию для эффективной и безаварийной работы оборудования.
| Ограничение ответственности |
Ни при
каких обстоятельствах |