Оперативные параметры |
| CTR.1 | 0x0050 | 80 | Режим
работы группы 1 | ENUM | RW | 0 – Stop 1 – Run 2 –
Man |
| CTR.2 | 0x0051 | 81 | Режим
работы группы 2 | ENUM | RW |
| CTR.3 | 0x0052 | 82 | Режим
работы группы 3 | ENUM | RW |
| CTR.4 | 0x0053 | 83 | Режим
работы группы 4 | ENUM | RW |
| CTR.5 | 0x0054 | 84 | Режим
работы группы 5 | ENUM | RW |
| CTR.6 | 0x0055 | 85 | Режим
работы группы 6 | ENUM | RW |
Оперативные параметры входов |
IN | 0x1000 | 4 096 | Измеренное значение на канале 1 | FLOAT_A | RO | -1999...9999 |
0x1100 | 4 352 | Измеренное
значение на канале 2 |
0x1200 | 4 608 | Измеренное
значение на канале 3 |
0x1300 | 4 864 | Измеренное
значение на канале 4 |
0x1400 | 5 120 | Измеренное
значение на канале 5 |
0x1500 | 5 376 | Измеренное
значение на канале 6 |
|
|
ERR | 0x1002 | 4 098 | Код ошибки на канале 1 | BIT_ARRAY | RO | | Имя | Описание | Номер бита |
|---|
| OVL | Измеренное значение входной величины выше допустимого предела | 0 | | UNL | Измеренное значение входной величины ниже допустимого предела | 1 | | WIRE | Обрыв или неверное подключение датчика | 2 | | NO.DT | Данные не готовы | 3 | | OCL.H | ДХС превысил верхнюю границу измерения +100 °С, только для
типов датчиков – термопара | 4 | | OCL.L | ДХС превысил нижнюю границу измерения -50 °С, только для
типов датчиков – термопара | 5 | | A.ERR | Ошибка связи с АЦП | 6 |
|
| 0x1102 | 4 354 | Код
ошибки на канале 2 |
| 0x1202 | 4 610 | Код
ошибки на канале 3 |
| 0x1302 | 4 866 | Код
ошибки на канале 4 |
| 0x1402 | 5 122 | Код
ошибки на канале 5 |
| 0x1502 | 5 378 | Код ошибки на канале 6 |
|
|
|
|
| Оперативные параметры выходов |
| MAN.V.1 | 0x0070 | 46 | Управление задвижкой 1 в ручном режиме | INT16 | RW | | Имя | Сигнал | Описание |
|---|
| CLoS | –1 | закрыть | | VALV | 0 | удерживание текущего положения | | oPEn | 1 | открыть |
|
| MAN.V.1 | 0x0071 | 47 | Управление задвижкой 2 в ручном режиме | INT16 | RW |
| MAN.V.3 | 0x0072 | 48 | Управление задвижкой 3 в ручном режиме | INT16 | RW |
|
OUT.1 | 0x0040 | 64 | Значение на ВУ 1 | FLOAT_1 | RW | 0...100 |
OUT.2 | 0x0042 | 66 | Значение на ВУ 2 | FLOAT_1 | RW |
OUT.3 | 0x0044 | 68 | Значение на ВУ 3 | FLOAT_1 | RW |
OUT.4 | 0x0046 | 70 | Значение на ВУ 4 | FLOAT_1 | RW |
OUT.5 | 0x0048 | 72 | Значение на ВУ 5 | FLOAT_1 | RW |
OUT.6 | 0x004A | 74 | Значение на ВУ 6 | FLOAT_1 | RW |
Общие настройки входов (см. раздел) |
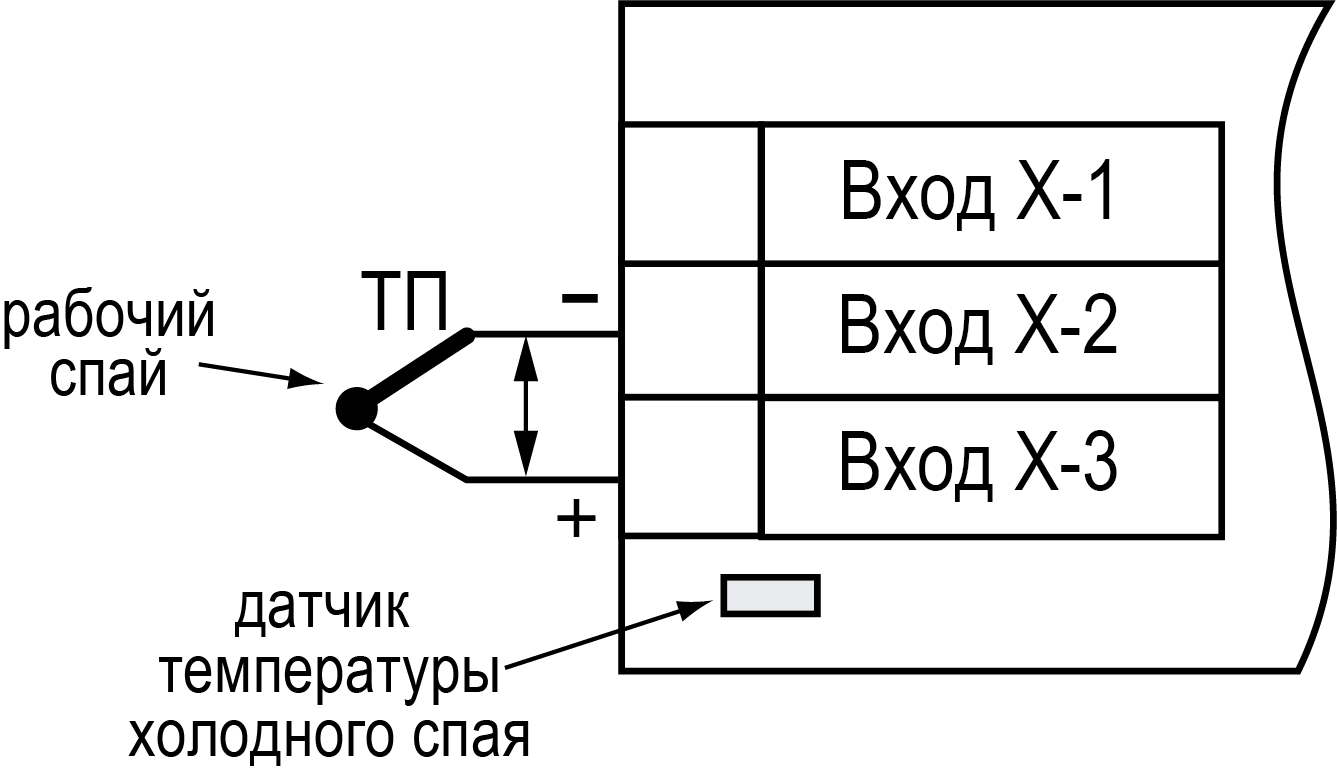
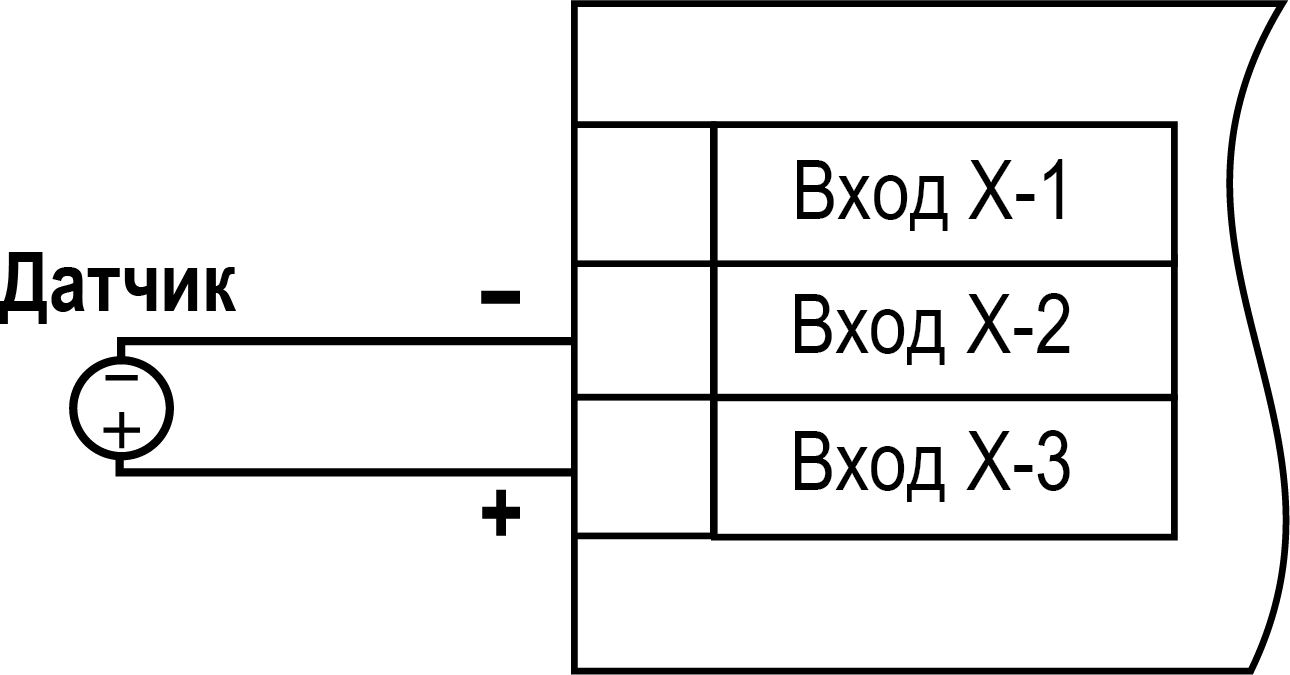
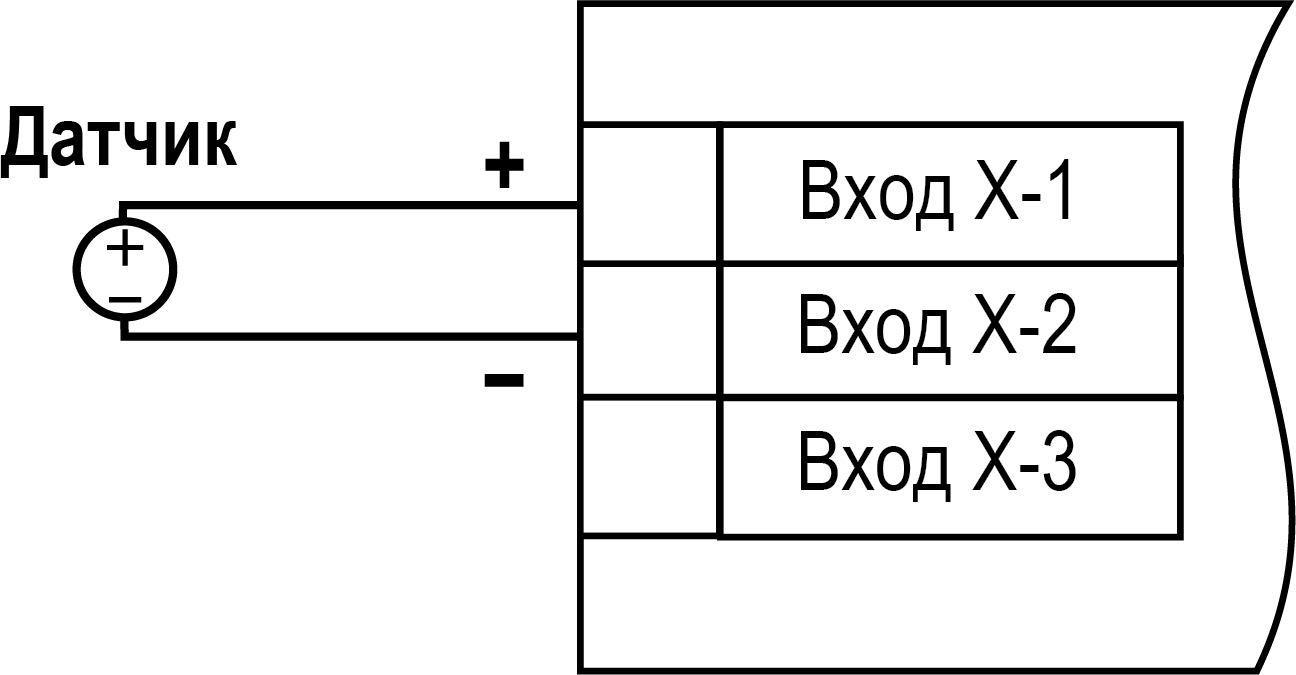
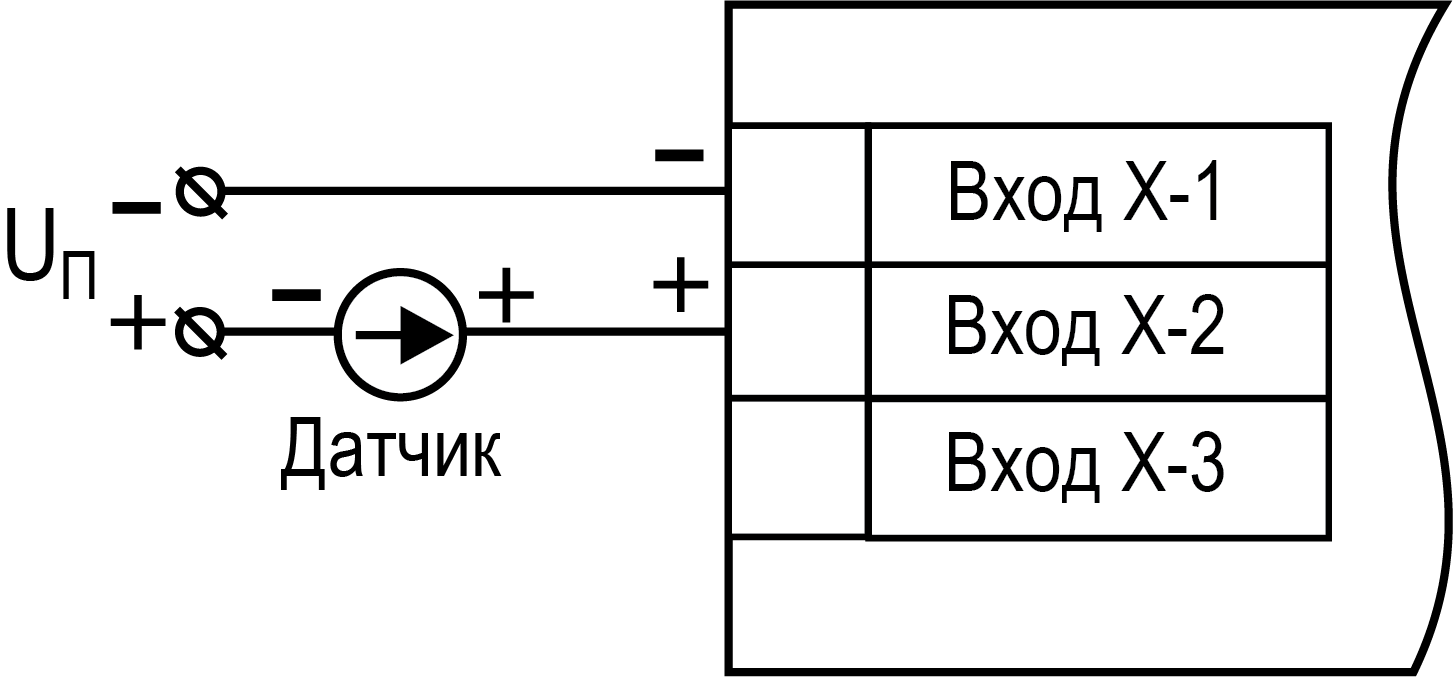
TYPE | 0x1008 | 4 104 | Тип
датчика | ENUM | RW | | Значение | Описание | Номер
бита |
|---|
oFF | Не подключен | 0 | С 50 | ТСМ (Cu50) | 1 | С 53 | ТСМ (Cu53) | 2 | С100 | ТСМ (Cu100) | 3 | С500 | ТСМ (Cu500) | 4 | С 1.0 | ТСМ (Cu1000) | 5 | 50 С | ТСМ (50М) | 6 | 100С | ТСМ (100М) | 7 | 500С | ТСМ (500М) | 8 | 1.0 С | ТСМ (1000М) | 9 | P 50 | ТСП(Pt50) | 10 | P100 | ТСП(Pt100) | 11 | P500 | ТСП(Pt500) | 12 | P 1.0 | ТСП(Pt1000) | 13 | 50 P | ТСП (50П) | 14 | 100P | ТСП (100П) | 15 | 500P | ТСП (500П) | 16 | 1.0 P | ТСП (1000П) | 17 | 100n | ТСН (100Н) | 18 | 500n | ТСН (500Н) | 19 | 1.0 n | ТСН (1000Н) | 20 | NT_3 | Терморезистор 3 кОм | 21 | NT10 | Терморезистор 10 кОм | 22 | NT20 | Терморезистор 20 кОм | 23 | tC.L | ТХК (L) | 24 | tC.HA | ТХА (K) | 25 | tC.J | ТЖК(J) | 26 | tC.n | ТНН (N) | 27 | tC.t | ТМК (T) | 28 | tC.S | ТПП (S) | 29 | tC.r | ТПП (R) | 30 | tC.b | ТПР (B) | 31 | tC.A1 | ТВР (A-1) | 32 | tC.A2 | ТВР (A-2) | 33 | tC.A3 | ТВР (A-3) | 34 | tC.dL | Typ.L (DIN 43710) | 35 | tC.E | ТХКн (Е) | 36 | PIr.1 | Пирометр РК-15 | 37 | PIr.2 | Пирометр РК-20 | 38 | PIr.3 | Пирометр РС-20 | 39 | PIr.4 | Пирометр РС-25 | 40 | I 0.5 | Ток от 0 до 5 мА | 41 | I0.20 | Ток от 0 до 20 мА | 42 | I4.20 | Ток от 4 до 20 мА | 43 | U-5.5 | Напряжение от –50 до 50 мВ | 44 | U 0.1 | Напряжение от 0 до 1 В | 45 | U 5 | Напряжение от 0 до 5 В | 46 | U 10 | Напряжение от 0 до 10 В | 47 | POS.R | Резистивный датчик положения, потенциометр | 48 | POS.I | Токовый датчик положения от 4 до 20 мА | 49 | D.STP | Цифровой (дискретный) вход СТОП, изменение
режима работы устройства, изменение значения по фронту цифрового (дискретного)
входа только в состояние STOP и по фронту регистра CTR в любое состояние | 50 | D.MAN | Цифровой (дискретный) вход СТОП -
РУЧНОЙ отображение для IN | 51 | D.RUN | Цифровой (дискретный) вход СТОП - ПУСК отображение
для IN | 52 | d.bLC | Приостанавливает работу всех логических устройств,
привязанных к каналу управления. Работает по уровню сигнала. При воздействии
нескольких дискретных сигналов на канал управления обрабатывается
по схеме логического И | 53 |
|
| 0x1108 | 4 360 | | | |
| 0x1208 | 4 616 | | | |
| 0x1308 | 4 872 | | | |
| 0x1408 | 5 128 | | | |
| 0x1508 | 5 384 | | | |
| | | | | |
| | | | | |
PRRT | 0x1009 | 4 105 | Приоритет опроса датчиков канала 1 | ENUM | RW | | Имя | Номер бита |
|---|
V.HIG | 0 | HIGH | 1 | NORM | 2 | LOW | 3 | V.LOW | 4 |
|
| 0x1109 | 4 361 | Приоритет опроса датчиков канала 2 | | |
| 0x1209 | 4 617 | Приоритет опроса датчиков канала 3 | | |
| 0x1309 | 4 873 | Приоритет опроса датчиков канала 4 | | |
| 0x1409 | 5 129 | Приоритет опроса датчиков канала 5 | | |
| 0x1509 | 5 385 | Приоритет опроса датчиков канала 6 | | |
| | |
| | |
| Термосопротивление |
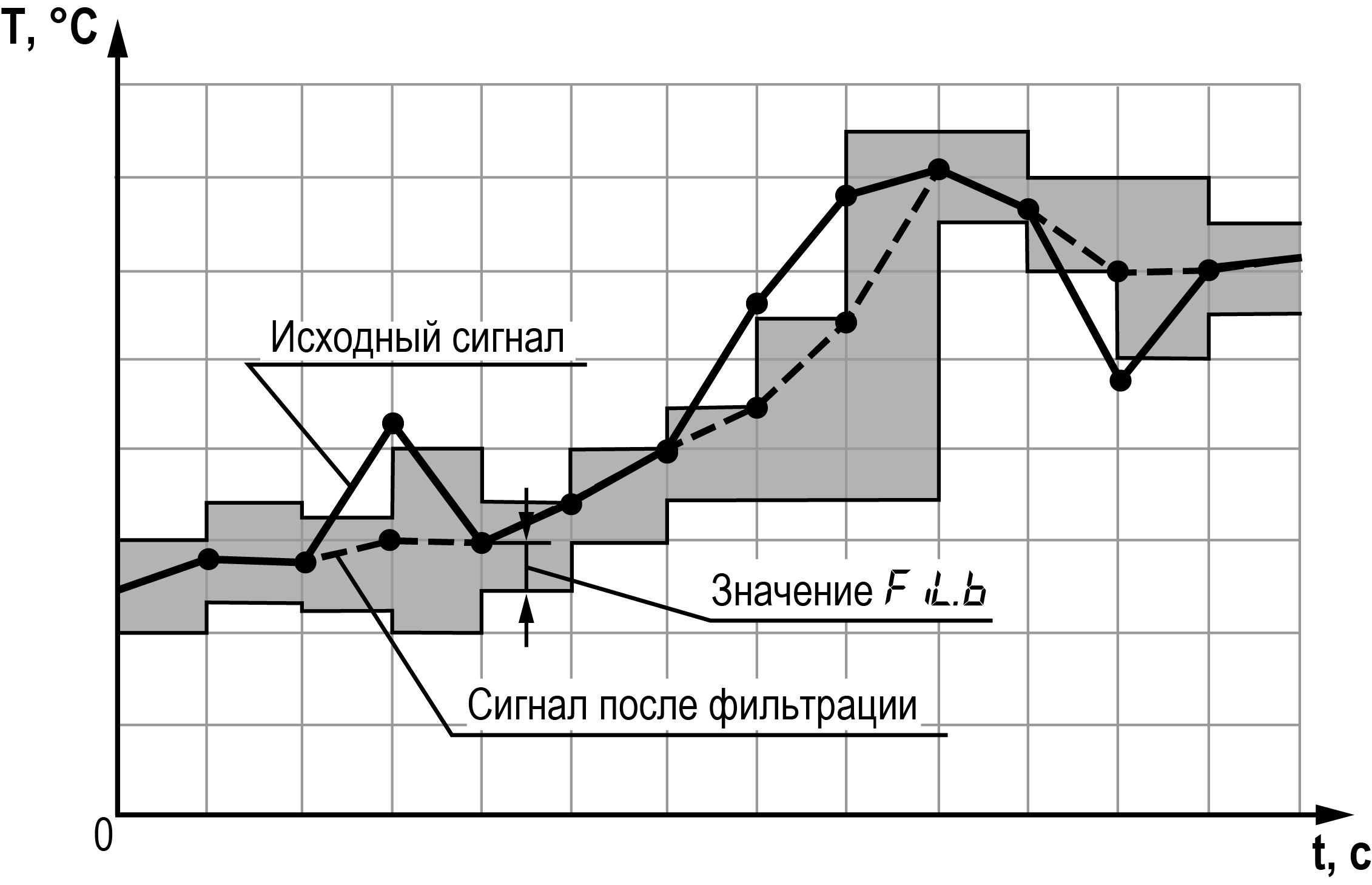
FIL.B | 0x1010 | 4 112 | Полоса фильтра канала 1 | FLOAT_A | RW | 0...Delta_Sens |
| 0x1110 | 4 368 | Полоса фильтра канала 2 |
| 0x1210 | 4 624 | Полоса фильтра канала 3 |
| 0x1310 | 4 880 | Полоса фильтра канала 4 |
| 0x1410 | 5 136 | Полоса фильтра канала 5 |
| 0x1510 | 5 392 | Полоса фильтра канала 6 |
|
|
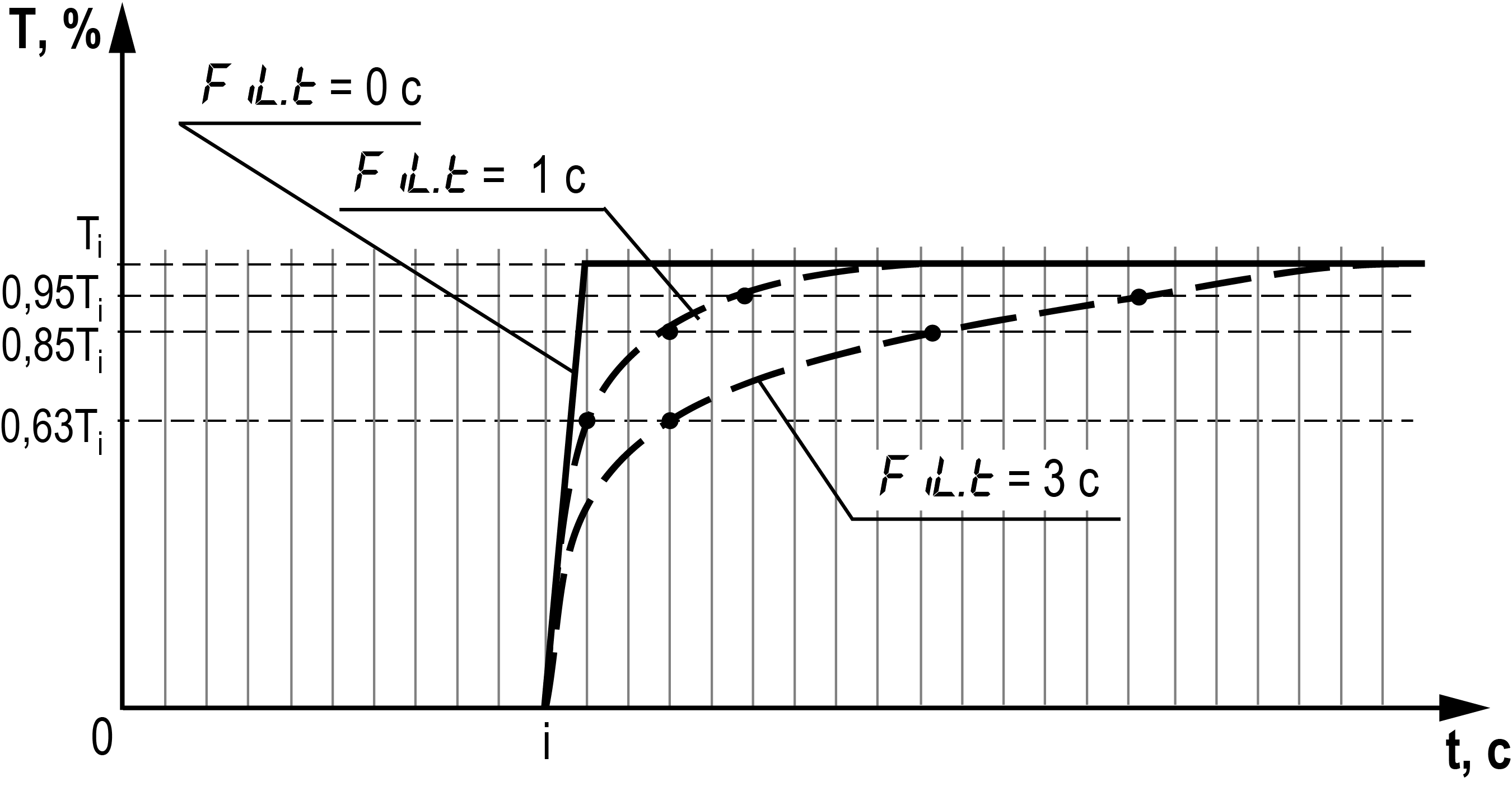
FIL.T | 0x1012 | 4 114 | Постоянная времени фильтра канала
1 | INT16 | RW | 0...999 |
| 0x1112 | 4 370 | Постоянная времени фильтра канала 2 |
| 0x1212 | 4 626 | Постоянная времени фильтра канала 3 |
| 0x1312 | 4 882 | Постоянная времени фильтра канала 4 |
| 0x1412 | 5 138 | Постоянная времени фильтра канала 5 |
| 0x1512 | 5 394 | Постоянная времени фильтра канала
6 |
|
|
BARR | 0x1013 | 4 115 | Компенсация сопротивления барьера
искрозащиты для ТС канала 1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x1113 | 4 371 | Компенсация сопротивления барьера искрозащиты для ТС канала 2 |
| 0x1213 | 4 627 | Компенсация сопротивления барьера искрозащиты для ТС канала 3 |
| 0x1313 | 4 883 | Компенсация сопротивления барьера искрозащиты для ТС канала 4 |
| 0x1413 | 5 139 | Компенсация сопротивления барьера искрозащиты для ТС канала 5 |
| 0x1513 | 5 395 | Компенсация сопротивления барьера
искрозащиты для ТС канала 6 |
|
|
| Терморезистор |
FIL.B | 0x1020 | 4 128 | Полоса фильтра канала 1 | FLOAT_A | RW | 0...Delta_Sens |
| 0x1120 | 4 384 | Полоса фильтра канала 2 |
| 0x1220 | 4 640 | Полоса фильтра канала 3 |
| 0x1320 | 4 896 | Полоса фильтра канала 4 |
| 0x1420 | 5 152 | Полоса фильтра канала 5 |
| 0x1520 | 5 408 | Полоса фильтра канала 6 |
|
|
FIL.T | 0x1022 | 4 130 | Постоянная времени фильтра канала 1 | INT16 | RW | 0...999 |
| 0x1122 | 4 386 | Постоянная времени фильтра канала 2 |
| 0x1222 | 4 642 | Постоянная времени фильтра канала 3 |
| 0x1322 | 4 898 | Постоянная времени фильтра канала 4 |
| 0x1422 | 5 154 | Постоянная времени фильтра канала 5 |
| 0x1522 | 5 410 | Постоянная времени фильтра канала
6 |
|
|
| Термопара |
FIL.B | 0x1030 | 4 144 | Полоса фильтра канала 1 | FLOAT_A | RW | 0...Delta_Sens |
| 0x1130 | 4 400 | Полоса фильтра канала 2 |
| 0x1230 | 4 656 | Полоса фильтра канала 3 |
| 0x1330 | 4 912 | Полоса фильтра канала 4 |
| 0x1430 | 5 168 | Полоса фильтра канала 5 |
| 0x1530 | 5 424 | Полоса фильтра канала 6 |
|
|
FIL.T | 0x1032 | 4 146 | Постоянная времени фильтра канала 1 | INT16 | RW | 0...999 |
| 0x1132 | 4 402 | Постоянная времени фильтра канала 2 |
| 0x1232 | 4 658 | Постоянная времени фильтра канала 3 |
| 0x1332 | 4 914 | Постоянная времени фильтра канала 4 |
| 0x1432 | 5 170 | Постоянная времени фильтра канала 5 |
| 0x1532 | 5 426 | Постоянная времени фильтра канала
6 |
|
|
| Датчик тока |
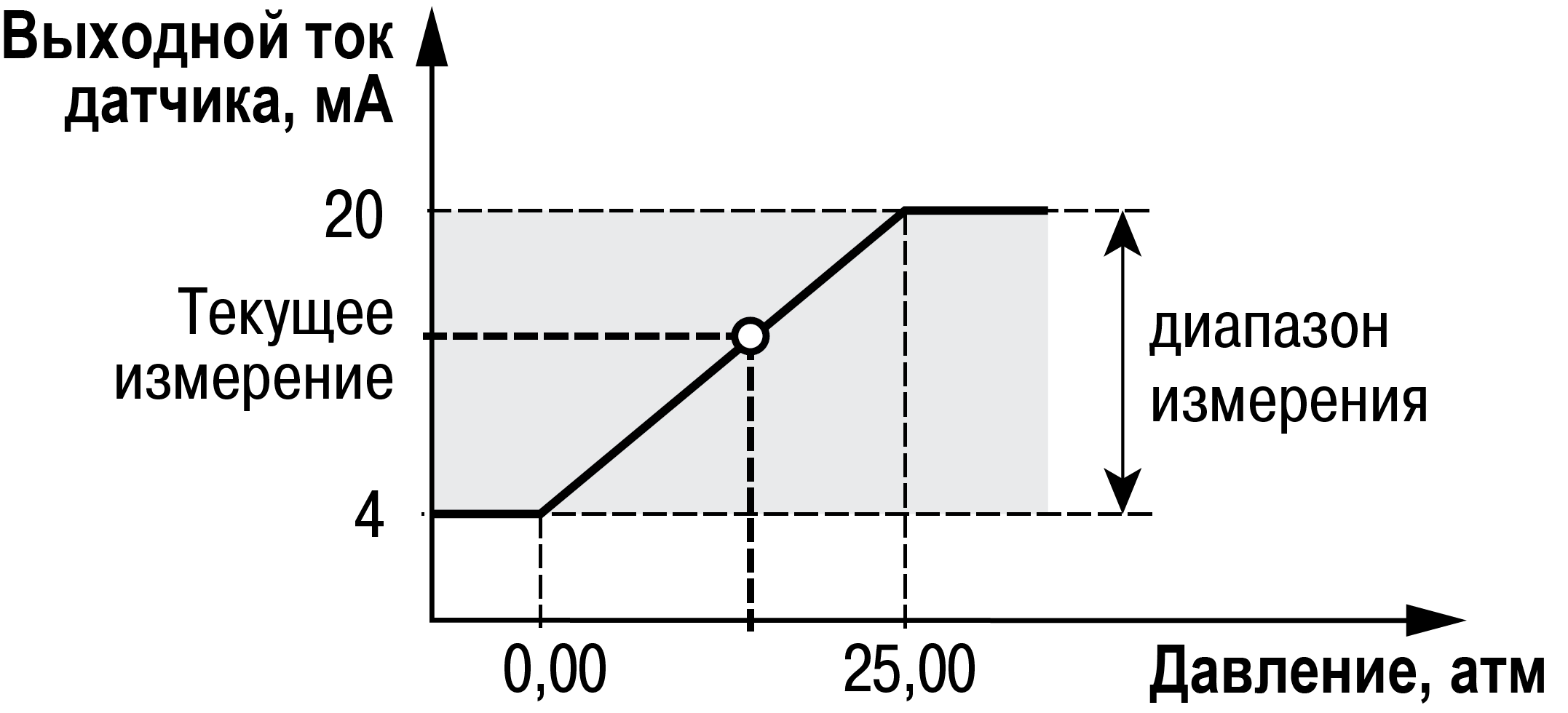
IND.L | 0x1040 | 4 160 | Нижний порог приведения значений тока
и напряжения к значению физической величины канала 1 | FLOAT_A | RW | -1999...9999 |
| 0x1140 | 4 416 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 2 |
| 0x1240 | 4 672 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 3 |
| 0x1340 | 4 928 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 4 |
| 0x1440 | 5 184 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 5 |
| 0x1540 | 5 440 | Нижний порог приведения значений тока
и напряжения к значению физической величины канала 6 |
|
|
IND.H | 0x1042 | 4 162 | Верхний порог приведения значений
тока и напряжения к значению физической величины канала 1 | FLOAT_A | RW | -1999...9999 |
| 0x1142 | 4 418 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 2 |
| 0x1242 | 4 674 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 3 |
| 0x1342 | 4 930 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 4 |
| 0x1442 | 5 186 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 5 |
| 0x1542 | 5 442 | Верхний порог приведения значений
тока и напряжения к значению физической величины канала 6 |
|
|
FIL.B | 0x1044 | 4 164 | Полоса фильтра канала 1 | FLOAT_A | RW | 0...Delta_Sens |
| 0x1144 | 4 420 | Полоса фильтра канала 2 |
| 0x1244 | 4 676 | Полоса фильтра канала 3 |
| 0x1344 | 4 932 | Полоса фильтра канала 4 |
| 0x1444 | 5 188 | Полоса фильтра канала 5 |
| 0x1544 | 5 444 | Полоса фильтра канала 6 |
|
|
FIL.T | 0x1046 | 4 166 | Постоянная времени фильтра канала
1 | INT16 | RW | 0...999 |
| 0x1146 | 4 422 | Постоянная времени фильтра канала 2 |
| 0x1246 | 4 678 | Постоянная времени фильтра канала 3 |
| 0x1346 | 4 934 | Постоянная времени фильтра канала 4 |
| 0x1446 | 5 190 | Постоянная времени фильтра канала 5 |
| 0x1546 | 5 446 | Постоянная времени фильтра канала
6 |
|
|
LOOP | 0x1047 | 4 167 | Включение встроенного питания токовой петли канала 1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x1147 | 4 423 | Включение встроенного питания токовой петли канала 2 |
| 0x1247 | 4 679 | Включение встроенного питания токовой петли канала 3 |
| 0x1347 | 4 935 | Включение встроенного питания токовой петли канала 4 |
| 0x1447 | 5 191 | Включение встроенного питания токовой петли канала 5 |
| 0x1547 | 5 447 | Включение встроенного питания токовой
петли канала 6 |
|
|
| Датчик напряжения |
IND.L | 0x1150 | 4 176 | Нижний порог приведения значений тока
и напряжения к значению физической величины канала 1 | FLOAT_A | RW | -1999...9999 |
| 0x1250 | 4 432 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 2 |
| 0x1350 | 4 688 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 3 |
| 0x1450 | 4 944 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 4 |
| 0x1550 | 5 200 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 5 |
| 0x1650 | 5 456 | Нижний порог приведения значений тока
и напряжения к значению физической величины канала 6 |
|
|
IND.H | 0x1052 | 4 178 | Верхний порог приведения значений
тока и напряжения к значению физической величины канала 1 | FLOAT_A | RW | -1999...9999 |
| 0x1152 | 4 434 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 2 |
| 0x1252 | 4 690 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 3 |
| 0x1352 | 4 946 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 4 |
| 0x1452 | 5 202 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 5 |
| 0x1552 | 5 458 | Верхний порог приведения значений
тока и напряжения к значению физической величины канала 6 |
|
|
FIL.B | 0x1054 | 4 180 | Полоса фильтра канала 1 | FLOAT_A | RW | 0...Delta_Sens |
| 0x1154 | 4 436 | Полоса фильтра канала 2 |
| 0x1254 | 4 692 | Полоса фильтра канала 3 |
| 0x1354 | 4 948 | Полоса фильтра канала 4 |
| 0x1454 | 5 204 | Полоса фильтра канала 5 |
| 0x1554 | 5 460 | Полоса фильтра канала 6 |
|
|
FIL.T | 0x1056 | 4 182 | Постоянная времени фильтра канала
1 | INT16 | RW | 0...999 |
| 0x1156 | 4 438 | Постоянная времени фильтра канала 2 |
| 0x1256 | 4 694 | Постоянная времени фильтра канала 3 |
| 0x1356 | 4 950 | Постоянная времени фильтра канала 4 |
| 0x1456 | 5 206 | Постоянная времени фильтра канала 5 |
| 0x1556 | 5 462 | Постоянная времени фильтра канала
6 |
|
|
| Датчик положения |
IND.L | 0x1060 | 4 192 | Нижний порог приведения значений тока
и напряжения к значению физической величины канала 1 | FLOAT_A | RW | -1999...9999 |
| 0x1160 | 4 448 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 2 |
| 0x1260 | 4 704 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 3 |
| 0x1360 | 4 960 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 4 |
| 0x1460 | 5 216 | Нижний порог приведения значений тока и напряжения к значению физической
величины канала 5 |
| 0x1560 | 5 472 | Нижний порог приведения значений тока
и напряжения к значению физической величины канала 6 |
|
|
IND.H | 0x1062 | 4 194 | Верхний порог приведения значений
тока и напряжения к значению физической величины канала 1 | FLOAT_A | RW | -1999...9999 |
| 0x1162 | 4 450 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 2 |
| 0x1262 | 4 706 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 3 |
| 0x1362 | 4 962 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 4 |
| 0x1462 | 5 218 | Верхний порог приведения значений тока и напряжения к значению физической
величины канала 5 |
| 0x1562 | 5 474 | Верхний порог приведения значений
тока и напряжения к значению физической величины канала 6 |
|
|
FIL.B | 0x1064 | 4 196 | Полоса фильтра канала 1 | FLOAT_A | RW | 0...Delta_Sens |
| 0x1164 | 4 452 | Полоса фильтра канала 2 |
| 0x1264 | 4 708 | Полоса фильтра канала 3 |
| 0x1364 | 4 964 | Полоса фильтра канала 4 |
| 0x1464 | 5 220 | Полоса фильтра канала 5 |
| 0x1564 | 5 476 | Полоса фильтра канала 6 |
|
|
FIL.T | 0x1066 | 4 198 | Постоянная времени фильтра канала
1 | INT16 | RW | 0...999 |
| 0x1166 | 4 454 | Постоянная времени фильтра канала 2 |
| 0x1266 | 4 710 | Постоянная времени фильтра канала 3 |
| 0x1366 | 4 966 | Постоянная времени фильтра канала 4 |
| 0x1466 | 5 222 | Постоянная времени фильтра канала 5 |
| 0x1566 | 5 478 | Постоянная времени фильтра канала
6 |
|
|
| Режим цифрового (дискретного) входа |
CH.1 | 0x1070 | 4 208 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.1 канала 1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x1170 | 4 464 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.1 канала 2 |
| 0x1270 | 4 720 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.1 канала 3 |
| 0x1370 | 4 976 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.1 канала 4 |
| 0x1470 | 5 232 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.1 канала 5 |
| 0x1570 | 5 488 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.1 канала 6 |
|
|
CH.2 | 0x1071 | 4 209 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.2 канала 1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x1171 | 4 465 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.2 канала 2 |
| 0x1271 | 4 721 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.2 канала 3 |
| 0x1371 | 4 977 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.2 канала 4 |
| 0x1471 | 5 233 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.2 канала 5 |
| 0x1571 | 5 489 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.2 канала 6 |
|
|
CH.3 | 0x1072 | 4 210 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.3 канала 1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x1172 | 4 466 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.3 канала 2 |
| 0x1272 | 4 722 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.3 канала 3 |
| 0x1372 | 4 978 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.3 канала 4 |
| 0x1472 | 5 234 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.3 канала 5 |
| 0x1572 | 5 490 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.3 канала 6 |
|
|
CH.4 | 0x1073 | 4 211 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.4 канала 1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x1173 | 4 467 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.4 канала 2 |
| 0x1273 | 4 723 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.4 канала 3 |
| 0x1373 | 4 979 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.4 канала 4 |
| 0x1473 | 5 235 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.4 канала 5 |
| 0x1573 | 5 491 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.4 канала 6 |
|
|
CH.5 | 0x1074 | 4 212 | Разрешение воздействия цифровом (дискретном)
входа на группу каналов логических устройств с номером LOG.5 канала
1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x1174 | 4 468 | Разрешение воздействия цифровом (дискретном) входа на группу каналов
логических устройств с номером LOG.5 канала 2 |
| 0x1274 | 4 724 | Разрешение воздействия цифровом (дискретном) входа на группу каналов
логических устройств с номером LOG.5 канала 3 |
| 0x1374 | 4 980 | Разрешение воздействия цифровом (дискретном) входа на группу каналов
логических устройств с номером LOG.5 канала 4 |
| 0x1474 | 5 236 | Разрешение воздействия цифровом (дискретном) входа на группу каналов
логических устройств с номером LOG.5 канала 5 |
| 0x1574 | 5 492 | Разрешение воздействия цифровом (дискретном)
входа на группу каналов логических устройств с номером LOG.5 канала
6 |
|
|
CH.6 | 0x1075 | 4 213 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.6 канала 1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x1175 | 4 469 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.6 канала 2 |
| 0x1275 | 4 725 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.6 канала 3 |
| 0x1375 | 4 981 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.6 канала 4 |
| 0x1475 | 5 237 | Разрешение воздействия входа в цифровом (дискретном) режиме на группу
каналов логических устройств с номером LOG.6 канала 5 |
| 0x1575 | 5 493 | Разрешение воздействия входа в цифровом
(дискретном) режиме на группу каналов логических устройств с номером
LOG.6 канала 6 |
|
|
| Коррекция показаний датчиков |
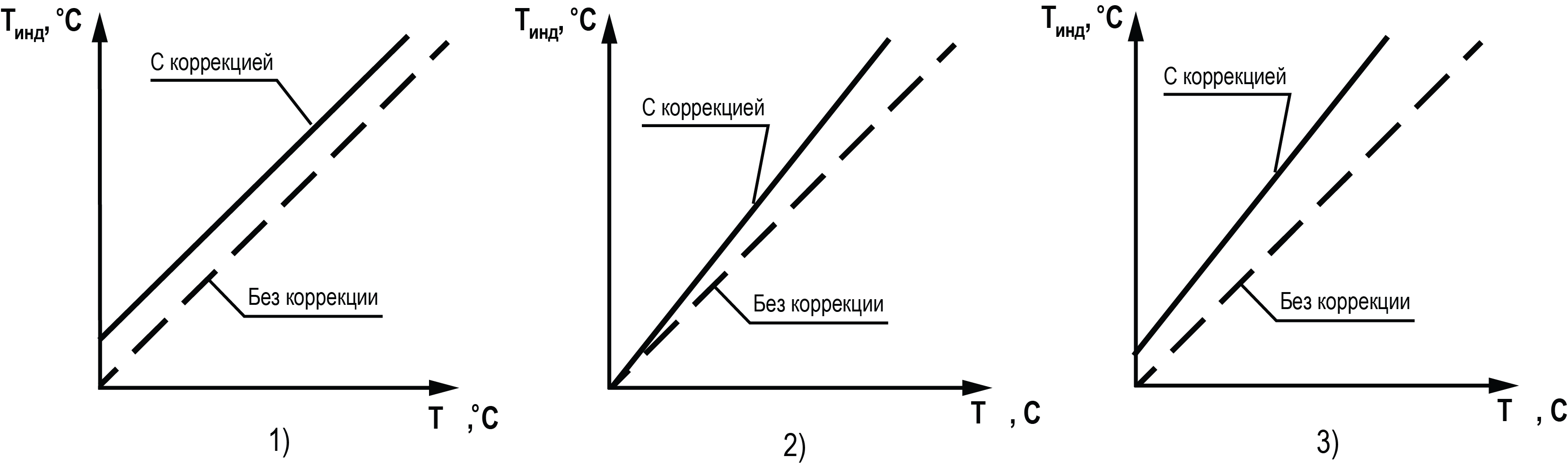
COR.A | 0x1080 | 4 224 | Параметр коррекции компенсации погрешности
подключенных датчиков канала 1 | FLOAT_A | RW | 0 1 2 |
| 0x1180 | 4 480 | Параметр коррекции компенсации погрешности подключенных датчиков
канала 2 |
| 0x1280 | 4 736 | Параметр коррекции компенсации погрешности подключенных датчиков
канала 3 |
| 0x1380 | 4 992 | Параметр коррекции компенсации погрешности подключенных датчиков
канала 4 |
| 0x1480 | 5 248 | Параметр коррекции компенсации погрешности подключенных датчиков
канала 5 |
| 0x1580 | 5 504 | Параметр коррекции компенсации погрешности
подключенных датчиков канала 6 |
|
|
COR.B | 0x1082 | 4 226 | Параметр коррекции компенсации погрешности
подключенных датчиков канала 1 | FLOAT_A | RW | SensMin...SensMax |
| 0x1182 | 4 482 | Параметр коррекции компенсации погрешности подключенных датчиков
канала 2 |
| 0x1282 | 4 738 | Параметр коррекции компенсации погрешности подключенных датчиков
канала 3 |
| 0x1382 | 4 994 | Параметр коррекции компенсации погрешности подключенных датчиков
канала 4 |
| 0x1482 | 5 250 | Параметр коррекции компенсации погрешности подключенных датчиков
канала 5 |
| 0x1582 | 5 506 | Параметр коррекции компенсации погрешности
подключенных датчиков канала 6 |
|
|
Оперативные
параметры ЛУ |
FUN.V | 0x2000 | 8 192 | Вычисленное значение функции канала
1 | FLOAT_X | RO | -1999...9999 |
| 0x2100 | 8 448 | Вычисленное значение функции канала 2 |
| 0x2200 | 8 704 | Вычисленное значение функции канала 3 |
| 0x2300 | 8 960 | Вычисленное значение функции канала 4 |
| 0x2400 | 9 216 | Вычисленное значение функции канала 5 |
| 0x2500 | 9 472 | Вычисленное значение функции канала
6 |
|
|
OUT.P | 0x2002 | 8 194 | Выходная мощность ЛУ канала 1 | FLOAT_1 | в режиме MAN: RW в режиме RUN:
RO | 0...100 |
| 0x2102 | 8 450 | Выходная мощность ЛУ канала 2 |
| 0x2202 | 8 706 | Выходная мощность ЛУ канала 3 |
| 0x2302 | 8 962 | Выходная мощность ЛУ канала 4 |
| 0x2402 | 9 218 | Выходная мощность ЛУ канала 5 |
| 0x2502 | 9 474 | Выходная мощность ЛУ канала 6 |
|
|
ERR | 0x2004 | 8 196 | Код ошибки на входе 1...6 | BIT_ARRAY | RO | | Описание | Значение бита |
|---|
Измеренное значение входной величины выше допустимого предела | 0 | Измеренное значение входной величины ниже допустимого предела | 1 | Обрыв или неверное подключение датчика | 2 | Данные не готовы | 3 | ДХС превысил верхнюю границу измерения 100 °С, только для
типов датчиков – термопара | 4 | ДХС превысил нижнюю границу измерения -50 °С, только для
типов датчиков – термопара | 5 | Ошибка вычисления функции | 6 | Обрыв контура регулирования | 7 |
|
| 0x2104 | 8 452 |
| 0x2204 | 8 708 |
| 0x2304 | 8 964 |
| 0x2404 | 9 220 |
| 0x2504 | 9 476 |
|
|
Логика работы ЛУ (см. раздел) |
L.TYP | 0x2008 | 8 200 | Тип
ЛУ | ENUM | RW | | Значение | Описание | Номер
бита |
|---|
| OFF | Логическое устройство
выключено. | 0 | | HEAT | Дискретный: нагреватель
с гистерезисом Аналоговый: П-регулятор нагреватель | 1 | | COOL | Дискретный: охладитель
с гистерезисом Аналоговый: П-регулятор охладитель | 2 | | H.PID | ПИД-регулятор нагреватель | 3 | | C.PID | ПИД-регулятор охладитель | 4 | | ALRM | Сигнализатор. Прибор
должен отслеживать ошибки и аварийные события в ходе своей работы.
Ошибки могут быть внутренними, на входе и на выходе. Ошибки
на входе: обрыв датчика, короткое замыкание входа, выход показаний
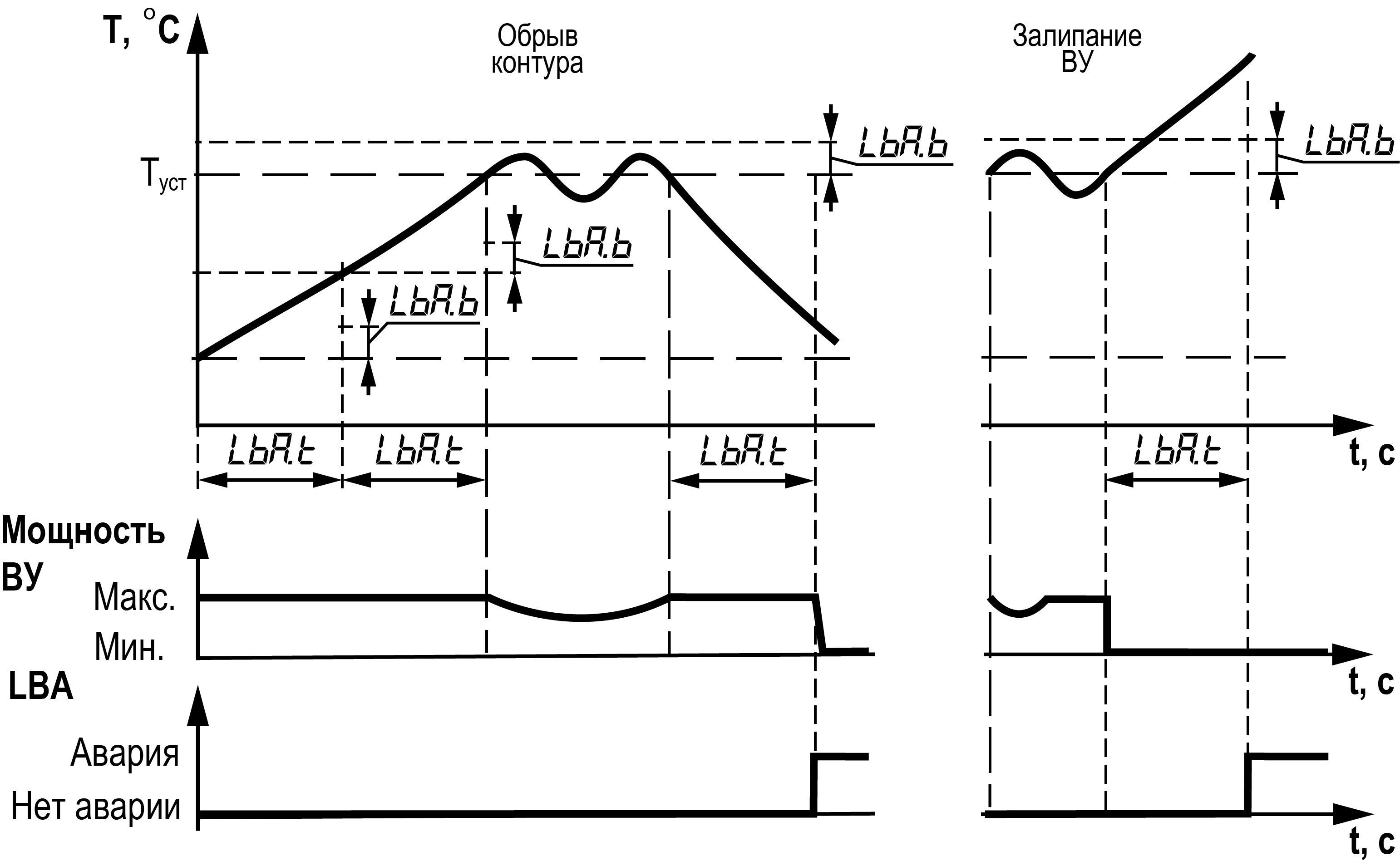
за диапазон измерений. Ошибки на выходе: обрыв контура регулирования. | 5 | | CONV | Регистратор. При аварии принимает значение ERR.S. Режимы не имеют
принудительной остановки, не имеют ошибки LBA и восстанавливаются,
когда ошибка на входе устранена | 6 | | H.VLV | ПИД-регулятор для задвижки, нагреватель | 7 | | C.VLV | ПИД-регулятор для задвижки, охладитель | 8 |
|
| 0x2108 | 8 456 | | | | |
| 0x2208 | 8 712 | | | | |
| 0x2308 | 8 968 | | | | |
| 0x2408 | 9 224 | | | | |
| 0x2508 | 9 480 | | | | |
| | | | | | |
| | | | | | |
FUN.T | 0x2009 | 8 201 | Вычисление
значения по выбранной функции для канала 1...6 | ENUM | RW | | Значение | Номер бита |
|---|
FUNC = IN.F[1] | 0 | Корень квадратный из текущего значения FUNC = SQRT(IN.F[1]) | 1 | Сумма значений каналов FUNC = Σ(IN.F[N] * CF[N]) | 2 | Средневзвешенная сумма значений каналов FUNC =
Σ(IN.F[N] * CF[N]) / N | 3 | Корень квадратный из средневзвешенной суммы значений каналов FUNC = SQRT (Σ(IN.F[N] * CF[N]) / N) | 4 | Минимальное значение FUNC = MIN(IN.F[N] * CF[N]) | 5 | Максимальное значение FUNC = MAX(IN.F[N] * CF[N]) | 6 | Соотношение двух входов FUNC = IN.F[0] / IN.F[1] | 7 | Расчет влажности по психрометрическому методу | 8 | Значения задаются внешним устройством по Modbus в регистр
E.VAL | 9 |
|
| 0x2109 | 8 457 | | | |
| 0x2209 | 8 713 | | | |
| 0x2309 | 8 969 | | | |
| 0x2409 | 9 225 | | | |
| 0x2509 | 9 481 | | | |
| | | | | |
| | | | | |
CHNL | 0x200A | 8 202 | Принадлежность каналу 1 логических
устройств | ENUM | RW | | Значение | Номер бита |
|---|
| CH.1 | 0 | | CH.2 | 1 | | CH.3 | 2 | | CH.4 | 3 | | CH.5 | 4 | | CH.6 | 5 |
|
| 0x210A | 8 458 | Принадлежность каналу 2 логических устройств |
| 0x220A | 8 714 | Принадлежность каналу 3 логических устройств |
| 0x230A | 8 970 | Принадлежность каналу 4 логических устройств |
| 0x240A | 9 226 | Принадлежность каналу 5 логических устройств |
| 0x250A | 9 482 | Принадлежность каналу 6 логических
устройств |
|
|
DPT | 0x200B | 8 203 | Положение десятичной точки канала
1 | ENUM | RW | | Значение | Номер бита |
|---|
| 0 | 0 | | 1 | 1 | | 2 | 2 | | 3 | 3 | | AUTO | 4 |
|
| 0x210B | 8 459 | Положение десятичной точки канала 2 |
| 0x220B | 8 715 | Положение десятичной точки канала 3 |
| 0x230B | 8 971 | Положение десятичной точки канала 4 |
| 0x240B | 9 227 | Положение десятичной точки канала 5 |
| 0x250B | 9 483 | Положение десятичной точки канала
6 |
|
|
IN.F.1 | 0x2010 | 8 208 | Выбор источника входных данных для
вычисления функции логического устройства (см. раздел) | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | IN1 | 1 | | IN2 | 2 | | IN3 | 3 | | IN4 | 4 | | IN5 | 5 | | IN6 | 6 |
|
| 0x2110 | 8 464 |
| 0x2210 | 8 720 |
| 0x2310 | 8 976 |
| 0x2410 | 9 232 |
| 0x2510 | 9 488 |
|
|
IN.F.2 | 0x2011 | 8 209 | | ENUM | RW |
| 0x2111 | 8 465 |
| 0x2211 | 8 721 |
| 0x2311 | 8 977 |
| 0x2411 | 9 233 |
| 0x2511 | 9 489 |
|
|
IN.F.3 | 0x2012 | 8 210 | | ENUM | RW |
| 0x2112 | 8 466 |
| 0x2212 | 8 722 |
| 0x2312 | 8 978 |
| 0x2412 | 9 234 |
| 0x2512 | 9 490 |
|
|
IN.F.4 | 0x2113 | 8 211 | | ENUM | RW |
| 0x2213 | 8 467 |
| 0x2313 | 8 723 |
| 0x2413 | 8 979 |
| 0x2513 | 9 235 |
| 0x2613 | 9 491 |
|
|
IN.F.5 | 0x2014 | 8 212 | | ENUM | RW |
| 0x2114 | 8 468 |
| 0x2214 | 8 724 |
| 0x2314 | 8 980 |
| 0x2414 | 9 236 |
| 0x2514 | 9 492 |
|
|
IN.F.6 | 0x2015 | 8 213 | | ENUM | RW |
| 0x2115 | 8 469 |
| 0x2215 | 8 725 |
| 0x2315 | 8 981 |
| 0x2415 | 9 237 |
| 0x2515 | 9 493 |
|
|
CF.1 | 0x2020 | 8 224 | Коэффициент знака и веса для вычисления
функции (см. раздел) | FLOAT_A | RW | -1999...9999 |
| 0x2120 | 8 480 |
| 0x2220 | 8 736 |
| 0x2320 | 8 992 |
| 0x2420 | 9 248 |
| 0x2520 | 9 504 |
|
|
CF.2 | 0x2022 | 8 226 | FLOAT_A | RW | -1999...9999 |
| 0x2122 | 8 482 |
| 0x2222 | 8 738 |
| 0x2322 | 8 994 |
| 0x2422 | 9 250 |
| 0x2522 | 9 506 |
|
|
CF.3 | 0x2024 | 8 228 | FLOAT_A | RW | -1999...9999 |
| 0x2124 | 8 484 |
| 0x2224 | 8 740 |
| 0x2324 | 8 996 |
| 0x2424 | 9 252 |
| 0x2524 | 9 508 |
|
|
CF.4 | 0x2026 | 8 230 | FLOAT_A | RW | -1999...9999 |
| 0x2126 | 8 486 |
| 0x2226 | 8 742 |
| 0x2326 | 8 998 |
| 0x2426 | 9 254 |
| 0x2526 | 9 510 |
|
|
CF.5 | 0x2028 | 8 232 | FLOAT_A | RW | -1999...9999 |
| 0x2128 | 8 488 |
| 0x2228 | 8 744 |
| 0x2328 | 9 000 |
| 0x2428 | 9 256 |
| 0x2528 | 9 512 |
|
|
CF.6 | 0x202A | 8 234 | FLOAT_A | RW | -1999...9999 |
| 0x212A | 8 490 |
| 0x222A | 8 746 |
| 0x232A | 9 002 |
| 0x242A | 9 258 |
| 0x252A | 9 514 |
|
|
| Нагреватель / охладитель |
SP | 0x2050 | 8 272 | Уставка для канала 1 | FLOAT_X | RW | -1999...9999 |
| 0x2150 | 8 528 | Уставка
для канала 2 |
| 0x2250 | 8 784 | Уставка
для канала 3 |
| 0x2350 | 9 040 | Уставка
для канала 4 |
| 0x2450 | 9 296 | Уставка
для канала 5 |
| 0x2550 | 9 552 | Уставка для канала 6 |
|
|
HYST | 0x2052 | 8 274 | Цифровой (дискретный) выход 1: зона
нечувствительности при переключении состояния выхода. Аналоговый
выход 1: полоса пропорциональности | FLOAT_X | RW | 0...DeltaFun |
| 0x2152 | 8 530 | Цифровой (дискретный) выход 2: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 2: полоса пропорциональности |
| 0x2252 | 8 786 | Цифровой (дискретный) выход 3: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 3: полоса пропорциональности |
| 0x2352 | 9 042 | Цифровой (дискретный) выход 4: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 4: полоса пропорциональности |
| 0x2452 | 9 298 | Цифровой (дискретный) выход 5: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 5: полоса пропорциональности |
| 0x2552 | 9 554 | Цифровой (дискретный) выход 6: зона
нечувствительности при переключении состояния выхода. Аналоговый
выход 6: полоса пропорциональности |
|
|
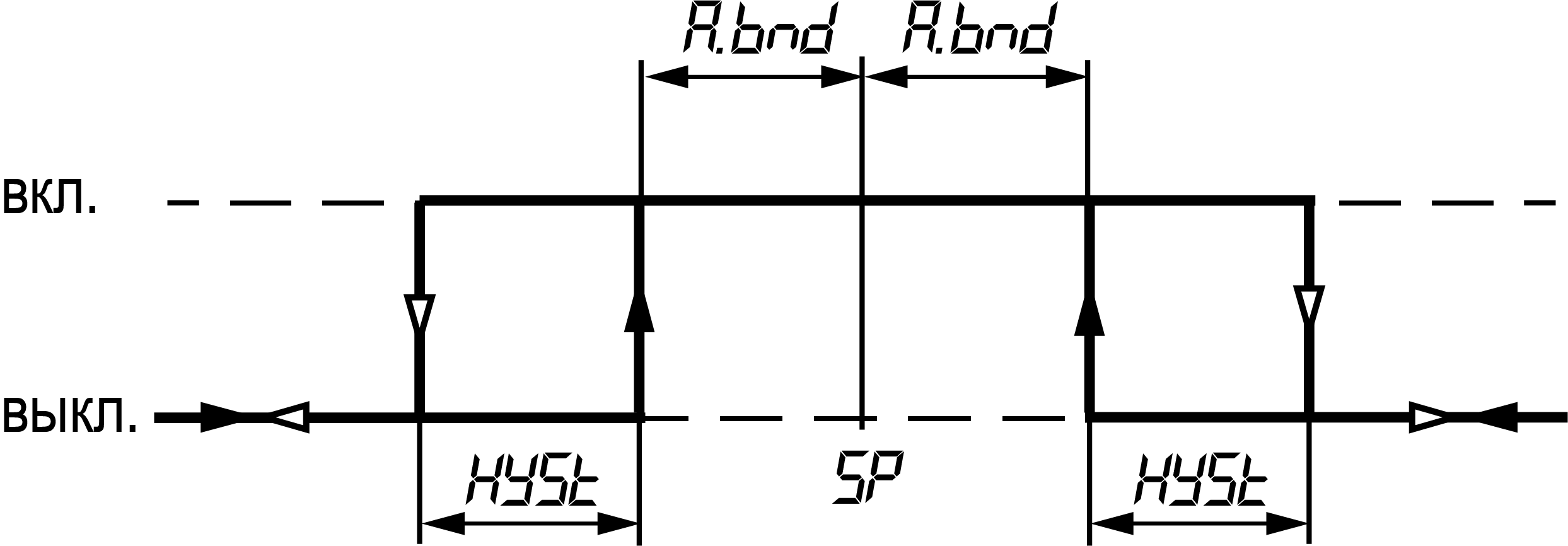
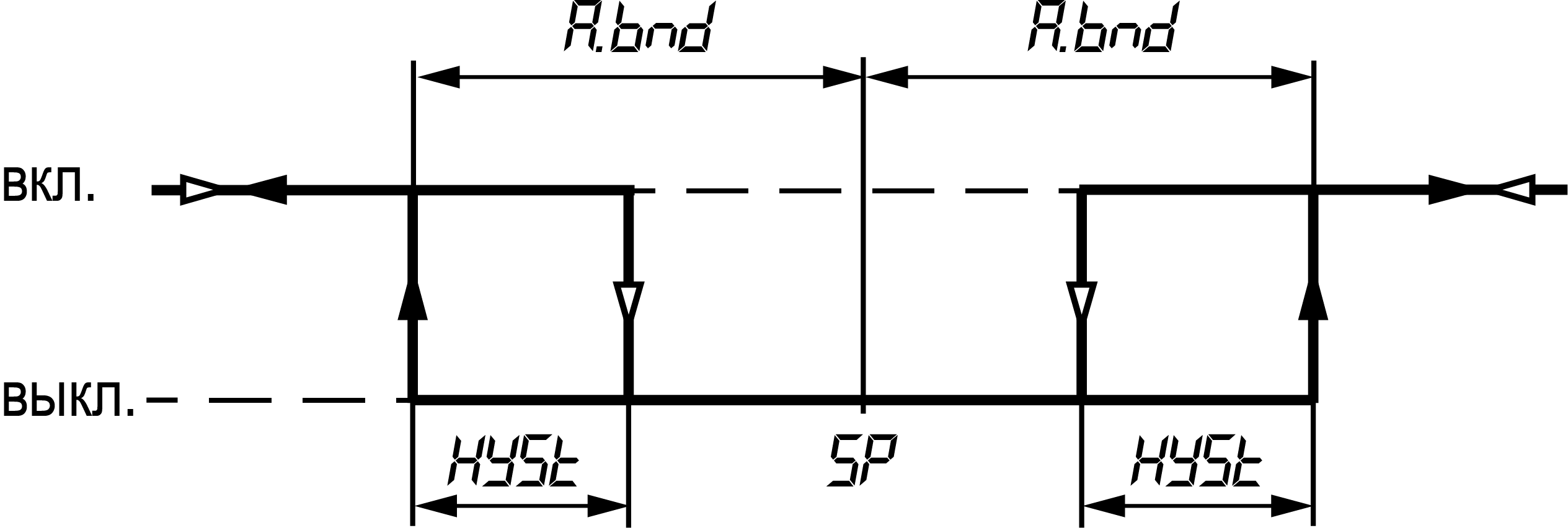
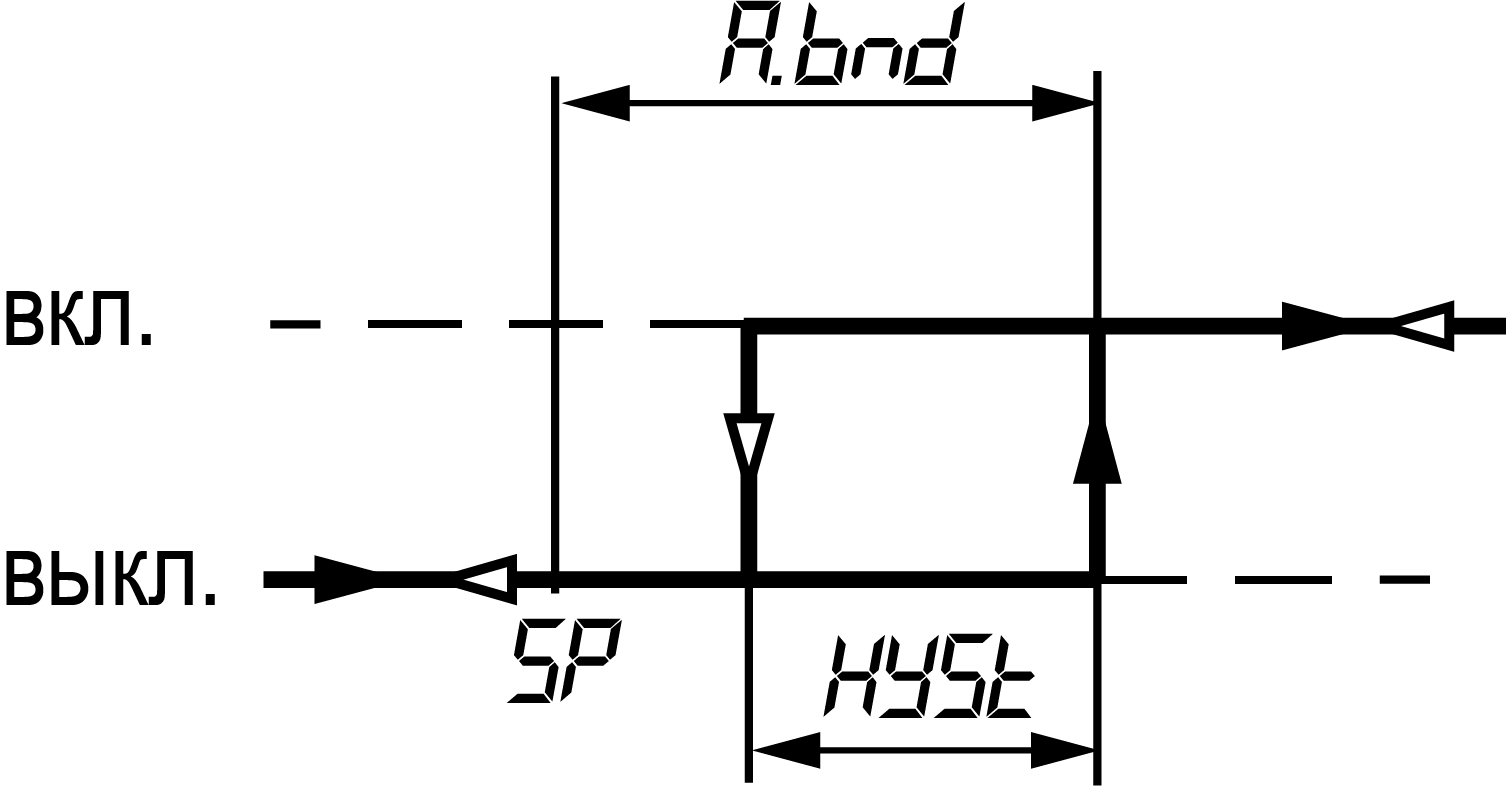
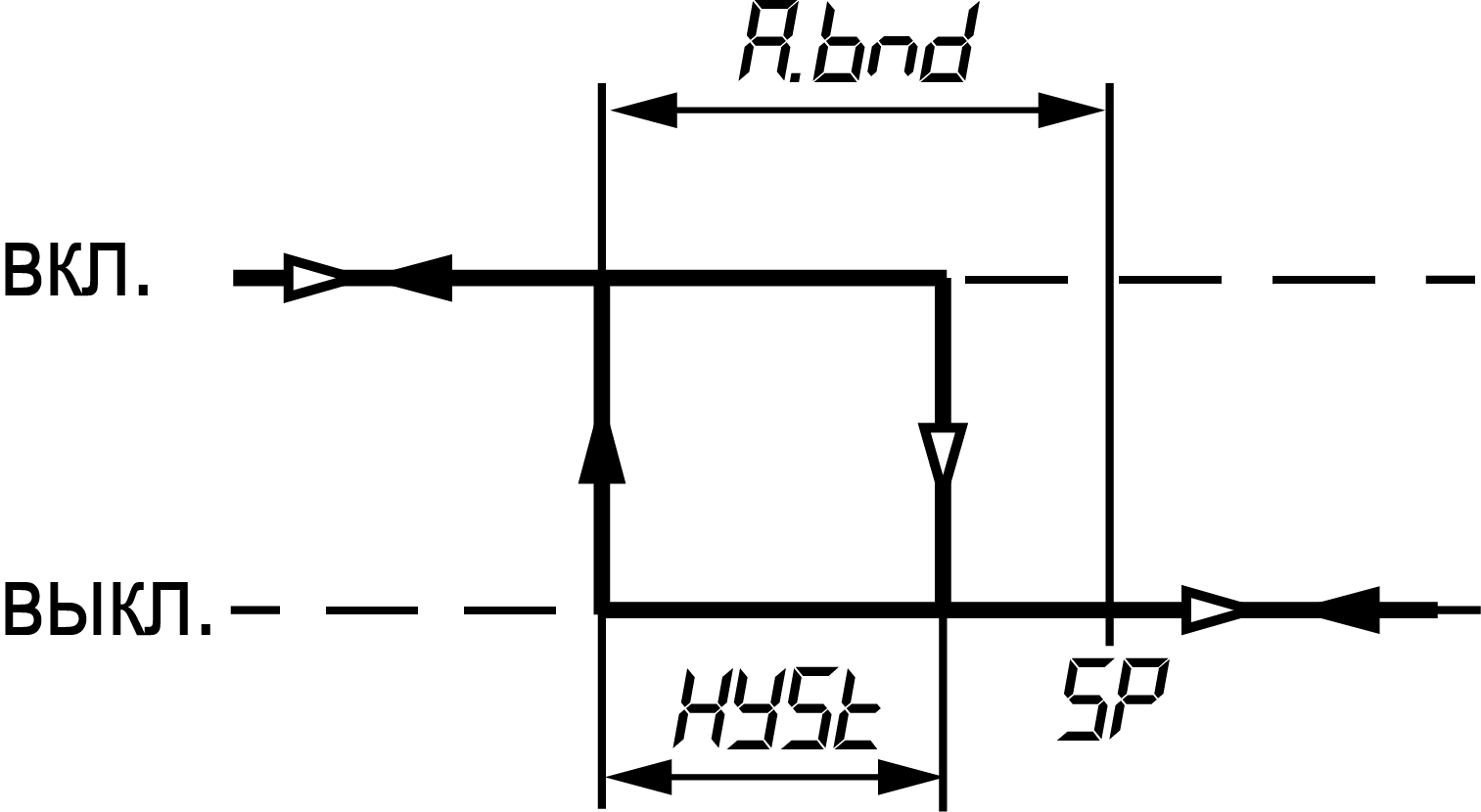
| Сигнализатор |
A.TYP | 0x2060 | 8 288 | Тип сигнализации (см. раздел) | ENUM | RW | | Значение | Номер бита |
|---|
OFF | 0 | SP.П | 1 | SP.U | 2 | SP.HI | 3 | SP.LO | 4 | 0.П | 5 | 0.U | 6 | 0.HI | 7 | 0.LO | 8 |
|
| 0x2160 | 8 544 |
| 0x2260 | 8 800 |
| 0x2360 | 9 056 |
| 0x2460 | 9 312 |
| 0x2560 | 9 568 |
| |
|
SP | 0x2061 | 8 289 | Уставка 1 | FLOAT_X | RW | -1999...9999 |
| 0x2161 | 8 545 | Уставка
2 |
| 0x2261 | 8 801 | Уставка
3 |
| 0x2361 | 9 057 | Уставка
4 |
| 0x2461 | 9 313 | Уставка
5 |
| 0x2561 | 9 569 | Уставка 6 |
|
|
A.BND | 0x2063 | 8 291 | Порог срабатывания компаратора сигнализатора
канала 1 | FLOAT_X | RW | 0...DeltaFun |
| 0x2163 | 8 547 | Порог срабатывания компаратора сигнализатора канала 2 |
| 0x2263 | 8 803 | Порог срабатывания компаратора сигнализатора канала 3 |
| 0x2363 | 9 059 | Порог срабатывания компаратора сигнализатора канала 4 |
| 0x2463 | 9 315 | Порог срабатывания компаратора сигнализатора канала 5 |
| 0x2563 | 9 571 | Порог срабатывания компаратора сигнализатора
канала 6 |
|
|
HYST | 0x2065 | 8 293 | Цифровой (дискретный) выход 1: зона
нечувствительности при переключении состояния выхода. Аналоговый
выход 1: полоса пропорциональности | FLOAT_X | RW | 0...DeltaFun |
| 0x2165 | 8 549 | Цифровой (дискретный) выход 2: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 2: полоса пропорциональности |
| 0x2265 | 8 805 | Цифровой (дискретный) выход 3: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 3: полоса пропорциональности |
| 0x2365 | 9 061 | Цифровой (дискретный) выход 4: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 4: полоса пропорциональности |
| 0x2465 | 9 317 | Цифровой (дискретный) выход 5: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 5: полоса пропорциональности |
| 0x2565 | 9 573 | Цифровой (дискретный) выход 6: зона
нечувствительности при переключении состояния выхода. Аналоговый
выход 6: полоса пропорциональности |
|
|
F.BLC | 0x2067 | 8 295 | Блокировка первого срабатывания компаратора
1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| 0x2167 | 8 551 | Блокировка первого срабатывания компаратора 2 |
| 0x2267 | 8 807 | Блокировка первого срабатывания компаратора 3 |
| 0x2367 | 9 063 | Блокировка первого срабатывания компаратора 4 |
| 0x2467 | 9 319 | Блокировка первого срабатывания компаратора 5 |
| 0x2567 | 9 575 | Блокировка первого срабатывания компаратора
6 |
|
|
| ПИД-регулятор |
SP | 0x2070 | 8 304 | Уставка регулятора 1 | FLOAT_X | RW | -1999...9999 |
| 0x2170 | 8 560 | Уставка
регулятора 2 |
| 0x2270 | 8 816 | Уставка
регулятора 3 |
| 0x2370 | 9 072 | Уставка
регулятора 4 |
| 0x2470 | 9 328 | Уставка
регулятора 5 |
| 0x2570 | 9 584 | Уставка регулятора 6 |
|
|
PID.P | 0x2072 | 8 306 | Полоса пропорциональности ПИД-регулятора
1 | FLOAT_X | RW | 0.001...9999 |
| 0x2172 | 8 562 | Полоса пропорциональности ПИД-регулятора 2 |
| 0x2272 | 8 818 | Полоса пропорциональности ПИД-регулятора 3 |
| 0x2372 | 9 074 | Полоса пропорциональности ПИД-регулятора 4 |
| 0x2472 | 9 330 | Полоса пропорциональности ПИД-регулятора 5 |
| 0x2572 | 9 586 | Полоса пропорциональности ПИД-регулятора
6 |
|
|
PID.I | 0x2074 | 8 308 | Интегральная постоянная ПИД-регулятора
1 | INT16 | RW | 0...3999 |
| 0x2174 | 8 564 | Интегральная постоянная ПИД-регулятора 2 |
| 0x2274 | 8 820 | Интегральная постоянная ПИД-регулятора 3 |
| 0x2374 | 9 076 | Интегральная постоянная ПИД-регулятора 4 |
| 0x2474 | 9 332 | Интегральная постоянная ПИД-регулятора 5 |
| 0x2574 | 9 588 | Интегральная постоянная ПИД-регулятора
6 |
|
|
PID.D | 0x2075 | 8 309 | Дифференциальная постоянная ПИД-регулятора
1 | INT16 | RW | 0...3999 |
| 0x2175 | 8 565 | Дифференциальная постоянная ПИД-регулятора 2 |
| 0x2275 | 8 821 | Дифференциальная постоянная ПИД-регулятора 3 |
| 0x2375 | 9 077 | Дифференциальная постоянная ПИД-регулятора 4 |
| 0x2475 | 9 333 | Дифференциальная постоянная ПИД-регулятора 5 |
| 0x2575 | 9 589 | Дифференциальная постоянная ПИД-регулятора
6 |
|
|
V.SP | 0x2076 | 8 310 | Скорость изменения уставки 1 | FLOAT_X | RW | 0...9999 |
| 0x2176 | 8 566 | Скорость изменения уставки 2 |
| 2276 | 8 822 | Скорость изменения уставки 3 |
| 0x2376 | 9 078 | Скорость изменения уставки 4 |
| 0x2476 | 9 334 | Скорость изменения уставки 5 |
| 0x2576 | 9 590 | Скорость изменения уставки 6 |
|
|
HYST | 0x2078 | 8 312 | Цифровой (дискретный) выход 1: зона
нечувствительности при переключении состояния выхода. Аналоговый
выход 1: полоса пропорциональности | FLOAT_X | RW | 0...DeltaFun |
| 0x2178 | 8 568 | Цифровой (дискретный) выход 2: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 2: полоса пропорциональности |
| 0x2278 | 8 824 | Цифровой (дискретный) выход 3: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 3: полоса пропорциональности |
| 0x2378 | 9 080 | Цифровой (дискретный) выход 4: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 4: полоса пропорциональности |
| 0x2478 | 9 336 | Цифровой (дискретный) выход 5: зона нечувствительности при переключении
состояния выхода. Аналоговый выход 5: полоса пропорциональности |
| 0x2578 | 9 592 | Цифровой (дискретный) выход 6: зона
нечувствительности при переключении состояния выхода. Аналоговый
выход 6: полоса пропорциональности |
|
|
OL.L | 0x207A | 8 314 | Минимальная выходная мощность канала
1 | FLOAT_1 | RW | 0...OL.H |
| 0x217A | 8 570 | Минимальная выходная мощность канала 2 |
| 0x227A | 8 826 | Минимальная выходная мощность канала 3 |
| 0x237A | 9 082 | Минимальная выходная мощность канала 4 |
| 0x247A | 9 338 | Минимальная выходная мощность канала 5 |
| 0x257A | 9 594 | Минимальная выходная мощность канала
6 |
|
|
OL.H | 0x207C | 8 316 | Максимальная выходная мощность канала
1 | FLOAT_1 | RW | OL.L...100 |
| 0x217C | 8 572 | Максимальная выходная мощность канала 2 |
| 0x227C | 8 828 | Максимальная выходная мощность канала 3 |
| 0x237C | 9 084 | Максимальная выходная мощность канала 4 |
| 0x247C | 9 340 | Максимальная выходная мощность канала 5 |
| 0x257C | 9 596 | Максимальная выходная мощность канала
6 |
|
|
OL.V | 0x207E | 8 318 | Максимальная скорость изменения выходной
мощности канала 1 | FLOAT_1 | RW | 0.2...100 |
| 0x217E | 8 574 | Максимальная скорость изменения выходной мощности канала 2 |
| 0x227E | 8 830 | Максимальная скорость изменения выходной мощности канала 3 |
| 0x237E | 9 086 | Максимальная скорость изменения выходной мощности канала 4 |
| 0x247E | 9 342 | Максимальная скорость изменения выходной мощности канала 5 |
| 0x257E | 9 598 | Максимальная скорость изменения выходной
мощности канала 6 |
|
|
ANR | 0x2080 | 8 320 | Автонастройка ПИД-регулятора канала
1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | RUN | 1 | | GOOD* | 2 | | FAIL* | 3 |  Примечание Примечание* Не доступны для записи по Modbus |
|
| 0x2180 | 8 576 | Автонастройка ПИД-регулятора канала 2 |
| 0x2280 | 8 832 | Автонастройка ПИД-регулятора канала 3 |
| 0x2380 | 9 088 | Автонастройка ПИД-регулятора канала 4 |
| 0x2480 | 9 344 | Автонастройка ПИД-регулятора канала 5 |
| 0x2580 | 9 600 | Автонастройка ПИД-регулятора канала
6 |
|
|
| Регистратор |
OUT.L | 0x2090 | 8 336 | Нижняя граница регистрации выхода
1 | FLOAT_X | RW | 0...100 |
| 0x2190 | 8 592 | Нижняя граница регистрации выхода 2 |
| 0x2290 | 8 848 | Нижняя граница регистрации выхода 3 |
| 0x2390 | 9 104 | Нижняя граница регистрации выхода 4 |
| 0x2490 | 9 360 | Нижняя граница регистрации выхода 5 |
| 0x2590 | 9 616 | Нижняя граница регистрации выхода
6 |
|
|
OUT.H | 0x2092 | 8 338 | Верхняя граница регистрации выхода
1 | FLOAT_X | RW | 0...100 |
| 0x2192 | 8 594 | Верхняя граница регистрации выхода 2 |
| 0x2292 | 8 850 | Верхняя граница регистрации выхода 3 |
| 0x2392 | 9 106 | Верхняя граница регистрации выхода 4 |
| 0x2492 | 9 362 | Верхняя граница регистрации выхода 5 |
| 0x2592 | 9 618 | Верхняя граница регистрации выхода
6 |
|
|
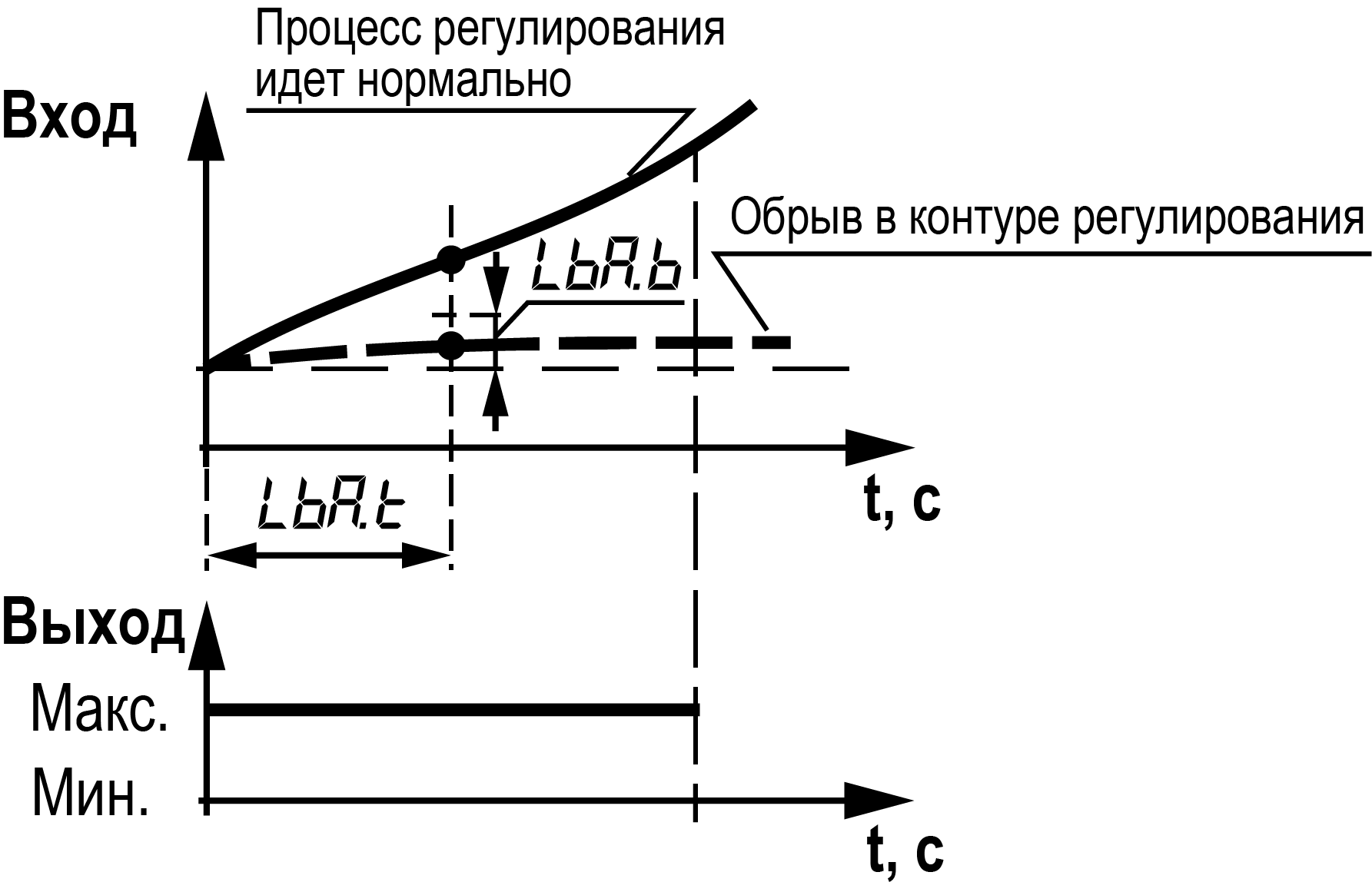
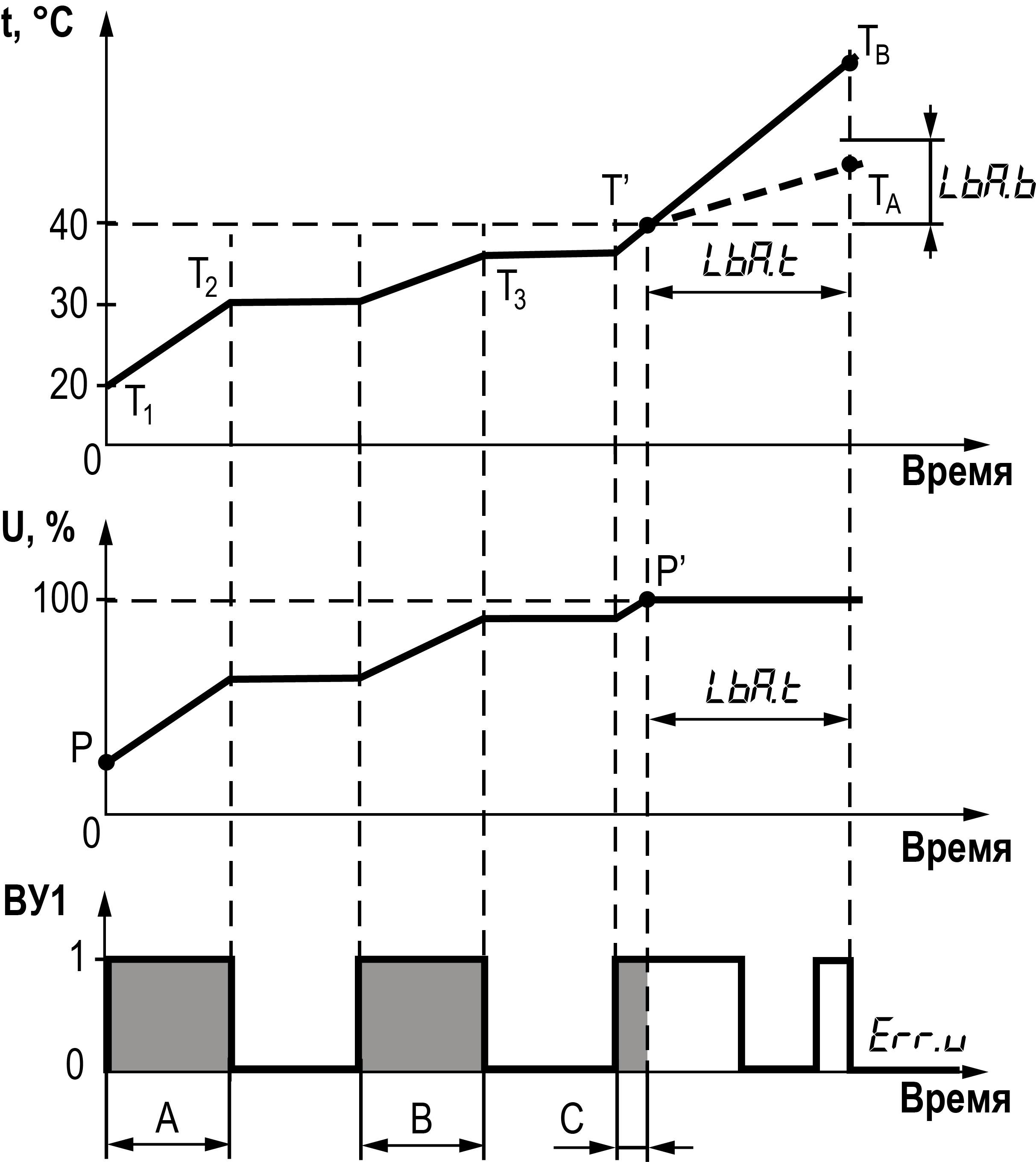
| Детектор обрыва контура регулирования |
LBA.B | 0x20A2 | 8 354 | Порог изменения регулируемой величины
в течение времени детектирования канала 1 | FLOAT_X | RW | 0...9999 |
| 0x21A2 | 8 610 | Порог изменения регулируемой величины в течение времени детектирования
канала 2 |
| 0x22A2 | 8 866 | Порог изменения регулируемой величины в течение времени детектирования
канала 3 |
| 0x23A2 | 9 122 | Порог изменения регулируемой величины в течение времени детектирования
канала 4 |
| 0x24A2 | 9 378 | Порог изменения регулируемой величины в течение времени детектирования
канала 5 |
| 0x25A2 | 9 634 | Порог изменения регулируемой величины
в течение времени детектирования канала 6 |
|
|
LBA.D | 0x20A4 | 8 356 | Зона нечувствительности детектора
обрыва контура 1 | FLOAT_X | RW | 0...9999 |
| 0x21A4 | 8 612 | Зона нечувствительности детектора обрыва контура 2 |
| 0x22A4 | 8 868 | Зона нечувствительности детектора обрыва контура 3 |
| 0x23A4 | 9 124 | Зона нечувствительности детектора обрыва контура 4 |
| 0x24A4 | 9 380 | Зона нечувствительности детектора обрыва контура 5 |
| 0x25A4 | 9 636 | Зона нечувствительности детектора
обрыва контура 6 |
|
|
| График уставки |
GRF.I | 0x20B0 | 8 368 | Источник данных для графика уставки
1 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | IN1 | 1 | | IN2 | 2 | | IN3 | 3 | | IN4 | 4 | | IN5 | 5 | | IN6 | 6 |
|
| 0x21B0 | 8 624 | Источник данных для графика уставки 2 |
| 0x22B0 | 8 880 | Источник данных для графика уставки 3 |
| 0x23B0 | 9 136 | Источник данных для графика уставки 4 |
| 0x24B0 | 9 392 | Источник данных для графика уставки 5 |
| 0x25B0 | 9 648 | Источник данных для графика уставки
6 |
|
|
GRF.N | 0x20B1 | 8 369 | Количество точек для графика уставки
1 | ENUM | RW | | Значение | Номер бита |
|---|
| 2 точки | 0 | | 3 точки | 1 | | 4 точки | 2 |
|
| 0x21B1 | 8 625 | Количество точек для графика уставки 2 |
| 0x22B1 | 8 881 | Количество точек для графика уставки 3 |
| 0x23B1 | 9 137 | Количество точек для графика уставки 4 |
| 0x24B1 | 9 393 | Количество точек для графика уставки 5 |
| 0x25B1 | 9 649 | Количество точек для графика уставки
6 |
|
|
IN.G.1 | 0x20B2 | 8 370 | Значение входа точка 1 | FLOAT_X | RW | –1999...9999 |
| 0x21B2 | 8 626 | Значение
входа точка 2 |
| 0x22B2 | 8 882 | Значение
входа точка 3 |
| 0x23B2 | 9 138 | Значение
входа точка 4 |
| 0x24B2 | 9 394 | Значение
входа точка 5 |
| 0x25B2 | 9 650 | Значение входа точка 6 |
|
|
SP.G.1 | 0x20B4 | 8 372 | Значение уставки точка 1 канал 1 | FLOAT_X | RW | –1999...9999 |
| 0x21B4 | 8 628 | Значение
уставки точка 1 канал 2 |
| 0x22B4 | 8 884 | Значение
уставки точка 1 канал 3 |
| 0x23B4 | 9 140 | Значение
уставки точка 1 канал 4 |
| 0x24B4 | 9 396 | Значение
уставки точка 1 канал 5 |
| 0x25B4 | 9 652 | Значение уставки точка 1 канал 6 |
|
|
IN.G.2 | 0x20B6 | 8 374 | Значение входа точка 2 канал 1 | FLOAT_X | RW | –1999...9999 |
| 0x21B6 | 8 630 | Значение
входа точка 2 канал 2 |
| 0x22B6 | 8 886 | Значение
входа точка 2 канал 3 |
| 0x23B6 | 9 142 | Значение
входа точка 2 канал 4 |
| 0x24B6 | 9 398 | Значение
входа точка 2 канал 5 |
| 0x25B6 | 9 654 | Значение входа точка 2 канал 6 |
|
|
SP.G.2 | 0x20B8 | 8 376 | Значение уставки точка 2 канал 1 | FLOAT_X | RW | –1999...9999 |
| 0x21B8 | 8 632 | Значение
уставки точка 2 канал 2 |
| 0x22B8 | 8 888 | Значение
уставки точка 2 канал 3 |
| 0x23B8 | 9 144 | Значение
уставки точка 2 канал 4 |
| 0x24B8 | 9 400 | Значение
уставки точка 2 канал 5 |
| 0x25B8 | 9 656 | Значение уставки точка 2 канал 6 |
|
|
IN.G.3 | 0x20BA | 8 378 | Значение входа точка 3 канал 1 | FLOAT_X | RW | –1999...9999 |
| 0x21BA | 8 634 | Значение
входа точка 3 канал 2 |
| 0x22BA | 8 890 | Значение
входа точка 3 канал 3 |
| 0x23BA | 9 146 | Значение
входа точка 3 канал 4 |
| 0x24BA | 9 402 | Значение
входа точка 3 канал 5 |
| 0x25BA | 9 658 | Значение входа точка 3 канал 6 |
|
|
SP.G.3 | 0x20BC | 8 380 | Значение уставки точка 3 канал 1 | FLOAT_X | RW | –1999...9999 |
| 0x21BC | 8 636 | Значение
уставки точка 3 канал 2 |
| 0x22BC | 8 892 | Значение
уставки точка 3 канал 3 |
| 0x23BC | 9 148 | Значение
уставки точка 3 канал 4 |
| 0x24BC | 9 404 | Значение
уставки точка 3 канал 5 |
| 0x25BC | 9 660 | Значение уставки точка 3 канал 6 |
|
|
IN.G.4 | 0x20BE | 8 382 | Значение входа точка 4 канал 1 | FLOAT_X | RW | –1999...9999 |
| 0x21BE | 8 638 | Значение
входа точка 4 канал 2 |
| 0x22BE | 8 894 | Значение
входа точка 4 канал 3 |
| 0x23BE | 9 150 | Значение
входа точка 4 канал 4 |
| 0x24BE | 9 406 | Значение
входа точка 4 канал 5 |
| 0x25BE | 9 662 | Значение входа точка 4 канал 6 |
|
|
SP.G.4 | 0x20C0 | 8 384 | Значение уставки точка 4 канал 1 | FLOAT_X | RW | –1999...9999 |
| 0x21C0 | 8 640 | Значение
уставки точка 4 канал 2 |
| 0x22C0 | 8 896 | Значение
уставки точка 4 канал 3 |
| 0x23C0 | 9 152 | Значение
уставки точка 4 канал 4 |
| 0x24C0 | 9 408 | Значение
уставки точка 4 канал 5 |
| 0x25C0 | 9 664 | Значение уставки точка 4 канал 6 |
|
|
Цифровой (дискретный) выход (см. раздел) |
CNT.P | 0x3000 | 12 288 | Период ШИМ канала 1 | INT16 | RW | 1...250 |
| 0x3100 | 12 544 | Период ШИМ канала 2 |
| 0x3200 | 12 800 | Период ШИМ канала 3 |
| 0x3300 | 13 056 | Период ШИМ канала 4 |
| 0x3400 | 13 312 | Период ШИМ канала 5 |
| 0x3500 | 13 568 | Период ШИМ канала 6 |
|
|
| DB.D | 0x3005 | 12293 | Минимальная
длительность ШИМ 1 | FLOAT_1 | RW | 0.02...9.99 |
| 0x3105 | 12549 | Минимальная
длительность ШИМ 2 | FLOAT_1 | RW |
| 0x3205 | 12805 | Минимальная
длительность ШИМ 3 | FLOAT_1 | RW |
| 0x3305 | 13061 | Минимальная
длительность ШИМ 4 | FLOAT_1 | RW |
| 0x3405 | 13317 | Минимальная
длительность ШИМ 5 | FLOAT_1 | RW |
| 0x3505 | 13573 | Минимальная
длительность ШИМ 6 | FLOAT_1 | RW |
D.ON | 0x3001 | 12 289 | Задержка включения цифрового (дискретного)
выхода 1 | INT16 | RW | 0...250 |
| 0x3101 | 12 545 | Задержка включения цифрового (дискретного) выхода 2 |
| 0x3201 | 12 801 | Задержка включения цифрового (дискретного) выхода 3 |
| 0x3301 | 13 057 | Задержка включения цифрового (дискретного) выхода 4 |
| 0x3401 | 13 313 | Задержка включения цифрового (дискретного) выхода 5 |
| 0x3501 | 13 569 | Задержка включения цифрового (дискретного)
выхода 6 |
|
|
D.OFF | 0x3002 | 12 290 | Задержка выключения цифрового (дискретного)
выхода 1 | INT16 | RW | 0...250 |
| 0x3102 | 12 546 | Задержка выключения цифрового (дискретного) выхода 2 |
| 0x3202 | 12 802 | Задержка выключения цифрового (дискретного) выхода 3 |
| 0x3302 | 13 058 | Задержка выключения цифрового (дискретного) выхода 4 |
| 0x3402 | 13 314 | Задержка выключения цифрового (дискретного) выхода 5 |
| 0x3502 | 13 570 | Задержка выключения цифрового (дискретного)
выхода 6 |
|
|
H.ON | 0x3003 | 12 291 | Минимальное время удержания цифрового
(дискретного) выхода 1 в состоянии включено | INT16 | RW | 0...250 |
| 0x3103 | 12 547 | Минимальное время удержания цифрового (дискретного) выхода 2 в состоянии
включено |
| 0x3203 | 12 803 | Минимальное время удержания цифрового (дискретного) выхода 3 в состоянии
включено |
| 0x3303 | 13 059 | Минимальное время удержания цифрового (дискретного) выхода 4 в состоянии
включено |
| 0x3403 | 13 315 | Минимальное время удержания цифрового (дискретного) выхода 5 в состоянии
включено |
| 0x3503 | 13 571 | Минимальное время удержания цифрового
(дискретного) выхода 6 в состоянии включено |
|
|
H.OFF | 0x3004 | 12 292 | Минимальное время удержания цифрового
(дискретного) выхода 1 в состоянии выключено | INT16 | RW | 0...250 |
| 0x3104 | 12 548 | Минимальное время удержания цифрового (дискретного) выхода 2 в состоянии
выключено |
| 0x3204 | 12 804 | Минимальное время удержания цифрового (дискретного) выхода 3 в состоянии
выключено |
| 0x3304 | 13 060 | Минимальное время удержания цифрового (дискретного) выхода 4 в состоянии
выключено |
| 0x3404 | 13 316 | Минимальное время удержания цифрового (дискретного) выхода 5 в состоянии
выключено |
| 0x3504 | 13 572 | Минимальное время удержания цифрового
(дискретного) выхода 6 в состоянии выключено |
|
|
Аналоговый выход (см. раздел) |
DB.A | 0x3010 | 12 304 | Минимальное изменение аналогового
ВУ 1 | FLOAT_1 | RW | 0...100 |
| 0x3110 | 12 560 | Минимальное изменение аналогового ВУ 2 |
| 0x3210 | 12 816 | Минимальное изменение аналогового ВУ 3 |
| 0x3310 | 13 072 | Минимальное изменение аналогового ВУ 4 |
| 0x3410 | 13 328 | Минимальное изменение аналогового ВУ 5 |
| 0x3510 | 13 584 | Минимальное изменение аналогового
ВУ 6 |
|
|
Дискретная задвижка |
DB.D | 0x3020 | 12 320 | Минимальный ход задвижки канала 1 | FLOAT_2 | RW | 0,02...9,99 |
| 0x3120 | 12 576 | Минимальный ход задвижки канала 2 |
| 0x3220 | 12 832 | Минимальный ход задвижки канала 3 |
| 0x3320 | 13 088 | Минимальный ход задвижки канала 4 |
| 0x3420 | 13 344 | Минимальный ход задвижки канала 5 |
| 0x3520 | 13 600 | Минимальный ход задвижки канала 6 |
|
|
V.MOT | 0x3022 | 12 322 | Время полного хода задвижки канала
1 | INT16 | RW | 5...999 |
| 0x3122 | 12 578 | Время полного хода задвижки канала 2 |
| 0x3222 | 12 834 | Время полного хода задвижки канала
3 |
|
|
|
|
|
V.GAP | 0x3023 | 12 323 | Время выборки люфта задвижки канала
1 | FLOAT_1 | RW | 0...10 |
| 0x3123 | 12 579 | Время выборки люфта задвижки канала 2 |
| 0x3223 | 12 835 | Время выборки люфта задвижки канала
3 |
|
|
|
|
|
V.REV | 0x3025 | 12 325 | Минимальное время реверса канала 1 | FLOAT_1 | RW | 0.5...10 |
| 0x3125 | 12 581 | Минимальное время реверса канала 2 |
| 0x3225 | 12 837 | Минимальное время реверса канала 3 |
|
|
|
|
|
Безопасное состояние выходов |
ERR.S | 0x3030 | 12 336 | Безопасное состояние в аварийном режиме
выхода 1 | FLOAT_1 | RW | 0...100 При типе ЛУ дискретная
задвижка - диапазон меняется на -1...100. При (-1) активируется
режим HOLD |
| 0x3130 | 12 592 | Безопасное состояние в аварийном режиме выхода 2 |
| 0x3230 | 12 848 | Безопасное состояние в аварийном режиме выхода 3 |
| 0x3330 | 13 104 | Безопасное состояние в аварийном режиме выхода 4 |
| 0x3430 | 13 360 | Безопасное состояние в аварийном режиме выхода 5 |
| 0x3530 | 13 616 | Безопасное состояние в аварийном режиме
выхода 6 |
|
|
STP.S | 0x3032 | 12 338 | Безопасное состояние выхода 1 в режиме | FLOAT_1 | RW | 0...100 При типе ЛУ дискретная
задвижка - диапазон меняется на -1...100. При (-1) активируется
режим HOLD |
| 0x3132 | 12 594 | Безопасное состояние выхода 2 в режиме |
| 0x3232 | 12 850 | Безопасное состояние выхода 3 в режиме |
| 0x3332 | 13 106 | Безопасное состояние выхода 4 в режиме |
| 0x3432 | 13 362 | Безопасное состояние выхода 5 в режиме |
| 0x3532 | 13 618 | Безопасное состояние выхода 6 в режиме |
|
|
| Ограничение доступа к параметрам |
SCR | 0x5000 | 20480 | Конфигурация отображаемых оперативных
параметров | ENUM | RW | | Обозначение на ЦИ | Описание |
|---|
| FU | Функция | | SP | Уставка, в ручном режиме выходная мощность OUT.P. OUT | | OV | Выходная мощность в процентах | | IN | Измеренное значение на входе, положение десятичной точки из
логического устройства SCR.X |
| Значение | Номер бита |
|---|
| FU.SP | 0 | | FU.SP | 1 | | PV.SP | 2 | | Pu.OV | 3 |
|
RET.T | 0x5001 | 20481 | Время автоматического возврата из
меню в режим отображения оперативных параметров при отсутствии активности | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | 5 | 1 | | 10 | 2 | | 30 | 3 | | 60 | 4 |
|
CHG.T | 0x5002 | 20482 | Автоматическая смена экранов отображения
оперативных параметров | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | 5 | 1 | | 10 | 2 | | 30 | 3 | | 60 | 4 | | 120 | 5 |
|
| Оперативные параметры каналов |
E.VAL.1 | 0x0080 | 128 | Регистр для внешнего управления параметром
FUN.T канала 1 | FLOAT | RW | 0...100 |
E.VAL.2 | 0x0082 | 130 | Регистр для внешнего управления параметром
FUN.T канала 2 | FLOAT | RW |
E.VAL.3 | 0x0084 | 132 | Регистр для внешнего управления параметром
FUN.T канала 3 | FLOAT | RW |
E.VAL.4 | 0x0086 | 134 | Регистр для внешнего управления параметром
FUN.T канала 4 | FLOAT | RW |
E.VAL.5 | 0x0088 | 136 | Регистр для внешнего управления параметром
FUN.T канала 5 | FLOAT | RW |
E.VAL.6 | 0x008A | 138 | Регистр для внешнего управления параметром
FUN.T канала 6 | FLOAT | RW |
|
|
FUN.1 | 0x0000 | 0 | Функция на канале 1 | FLOAT_X | RO | DeltaFun |
FUN.2 | 0x0002 | 2 | Функция на канале 2 | FLOAT_X | RO |
FUN.3 | 0x0004 | 4 | Функция на канале 3 | FLOAT_X | RO |
FUN.4 | 0x0006 | 6 | Функция на канале 4 | FLOAT_X | RO |
FUN.5 | 0x0008 | 8 | Функция на канале 5 | FLOAT_X | RO |
FUN.6 | 0x000A | 10 | Функция на канале 6 | FLOAT_X | RO |
|
|
IN.1 | 0x0010 | 16 | Измеренное значение на канале 1 | FLOAT_X | RO | minSense...maxSense |
IN.2 | 0x0012 | 18 | Измеренное значение на канале 2 | FLOAT_X | RO |
IN.3 | 0x0014 | 20 | Измеренное значение на канале 3 | FLOAT_X | RO |
IN.4 | 0x0016 | 22 | Измеренное значение на канале 4 | FLOAT_X | RO |
IN.5 | 0x0018 | 24 | Измеренное значение на канале 5 | FLOAT_X | RO |
IN.6 | 0x001A | 26 | Измеренное значение на канале 6 | FLOAT_X | RO |
|
|
SP.1 | 0x0020 | 32 | Уставка на канале 1 | FLOAT_X | RW | –1999...9999 |
SP.2 | 0x0022 | 34 | Уставка на канале 2 | FLOAT_X | RW |
SP.3 | 0x0024 | 36 | Уставка на канале 3 | FLOAT_X | RW |
SP.4 | 0x0026 | 38 | Уставка на канале 4 | FLOAT_X | RW |
SP.5 | 0x0028 | 40 | Уставка на канале 5 | FLOAT_X | RW |
SP.6 | 0x002A | 42 | Уставка на канале 6 | FLOAT_X | RW |
|
|
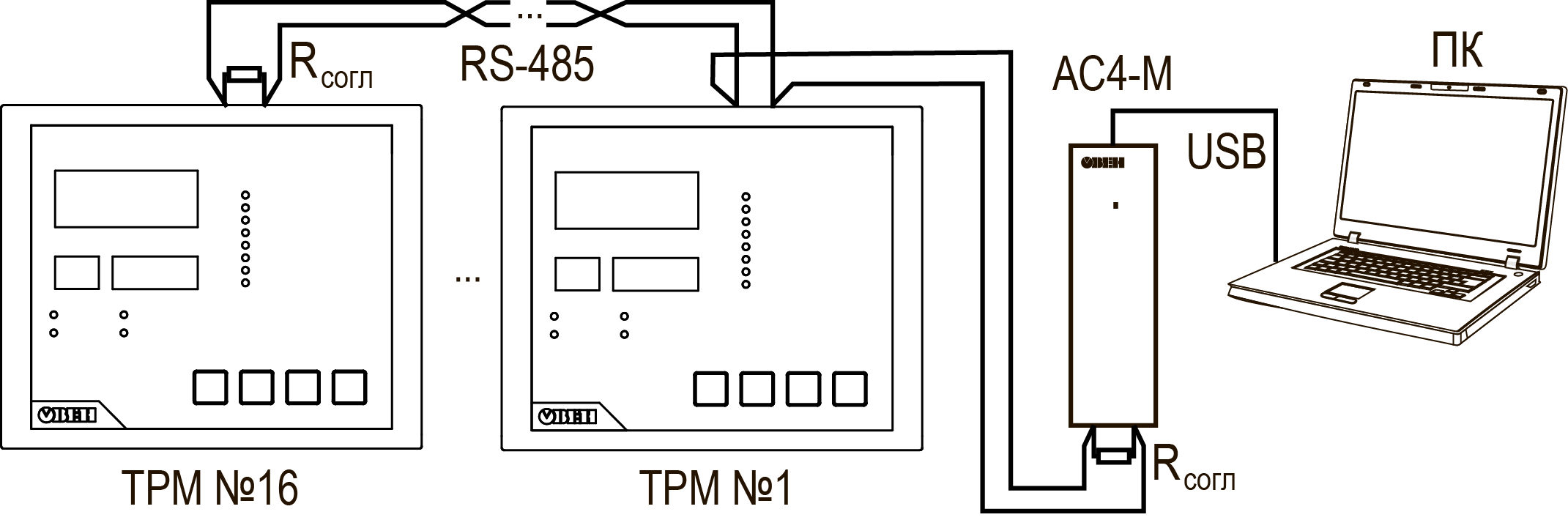
| Интерфейс RS-485 (см. раздел) |
PROT | 0x5100 | 20736 | Протокол обмена | ENUM | RW | | Значение | Номер бита |
|---|
RTU | 0 | ASCI | 1 |
|
ADDR | 0x5101 | 20737 | Адрес прибора | INT16 | RW | 1...247 |
BAUD | 0x5102 | 20738 | Скорость обмена данными | ENUM | RW | | Значение | Номер бита |
|---|
| 2,4 | 0 | | 4,8 | 1 | | 9,6 | 2 | | 14,4 | 3 | | 19,2 | 4 | | 28,8 | 5 | | 38,4 | 6 | | 57,6 | 7 | | 115,2 | 8 |
|
DPS | 0x5103 | 20739 | Формат посылки данных (см. раздел) | ENUM | RW | | Значение | Номер бита |
|---|
8N1 | 0 | 8O1 | 1 | 8E1 | 2 | 8N2 | 3 | 8O2 | 4 | 8E2 | 5 | 7O1 | 6 | 7E1 | 7 | 7O2 | 8 | 7E2 | 9 |
|
IDLE | 0x5104 | 20740 | Задержка ответа от прибора | ENUM | RW | 0...20 |
B.ORD | 0x5105 | 20741 | Порядок байт в регистре | ENUM | RW | | Значение | Номер бита |
|---|
MSB | 0 | LSB | 1 |
|
INIT | 0x5106 | 20742 | Регистр инициализации интерфейса RS–485 | ENUM | RW | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| Выбор алгоритма (см. раздел) |
| PRES | 0x6000 | 24576 | Выбор
алгоритма работы (см. раздел)Примечание В зависимости от модификации список доступных значений
меняется | ENUM | RW | | Значение | Номер
бита |
|---|
USER | 0 | 6.REG | 1 | 3R.AO | 2 | 3R.DO | 3 | 3H.DO | 4 | 3H.AO | 5 | 3.VLV | 6 | 3VLV | 7 |
|
| Контроль
доступа (см. раздел) * |
Примечание * Параметры доступны
на запись, если установлена перемычка (см. раздел) |
| PASS.IN | 0x7100 | 28928 | Регистр ввода пароля для доступа в меню ScRt. Если пароль не совпадает с PASS, то регистры группы
доступны только для чтения. Пароль сбрасывается (PASS.IN = 0) каждые
15 минут после успешного ввода и каждый неверный ввод. Регистр игнорируется,
меню не отображается, если CONF = OFF | INT | RW* | 0...9999 |
| PASS | 0x7101 | 28 929 | Пароль
доступа к меню SCRT. Если пароль не совпадает с PASS.IN, то чтение
значения регистр выдает -1 | INT | RW* | 0...9999 |
| PRT.E | 0x7102 | 28 930 | Защита от редактирования значений переменных. OFF – защита
отключена, все параметры доступны для редактирования SETT –
запрет редактирования настроек, редактирование только уставок, выходной
мощности и RUN/MAN/STOP ALL – блокировка редактирования всех
параметров. HIDE – Скрыть все параметры. Нет доступа в основное
меню настроек и в меню CTR | ENUM | RW* | | Значение | Номер бита |
|---|
| OFF | 0 | | SETT | 1 | | ALL | 2 | | HIDE | 3 |
|
| ATR.E | 0x7103 | 28 931 | Атрибуты защиты параметров от просмотра и изменения. OFF – отключить
атрибуты EDIT – редактирование атрибутов, вместо параметров в меню
отображаются их атрибуты ON – включить атрибуты | ENUM | RW* | | Значение | Номер бита |
|---|
| OFF | 0 | | EDIT | 1 | | ON | 2 |
|
| CJS.E | 0x7104 | 28 932 | | ENUM | RW* | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| Восстановление
заводских параметров (см. раздел)* |
Примечание * Параметры доступны
на запись, если установлена перемычка (см. раздел) |
| PASS.IN | 0x7200 | 29 184 | Регистр
ввода пароля для доступа к параметрам группы. Если пароль не совпадает
с 0100, то регистры группы доступны только для чтения. Пароль сбрасывается
(PASS.IN = 0) каждые 15 минут после успешного ввода и каждый неверный
ввод. Регистр игнорируется, меню не отображается, если CONF = OFF.
После верного ввода пароля производится возврат на заводские параметры
с последующей перезагрузкой устройства | INT | RW* | 0...9999 |
| D.RST | 0x7201 | 29 185 | Возврат
на заводские настройки. После применения заводских параметров прибор
перезагружается | ENUM | RW* | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|
| REST | 0x7202 | 29 186 | Удаленная перезагрузка
устройства | ENUM | RW* | | Значение | Номер бита |
|---|
| OFF | 0 | | ON | 1 |
|