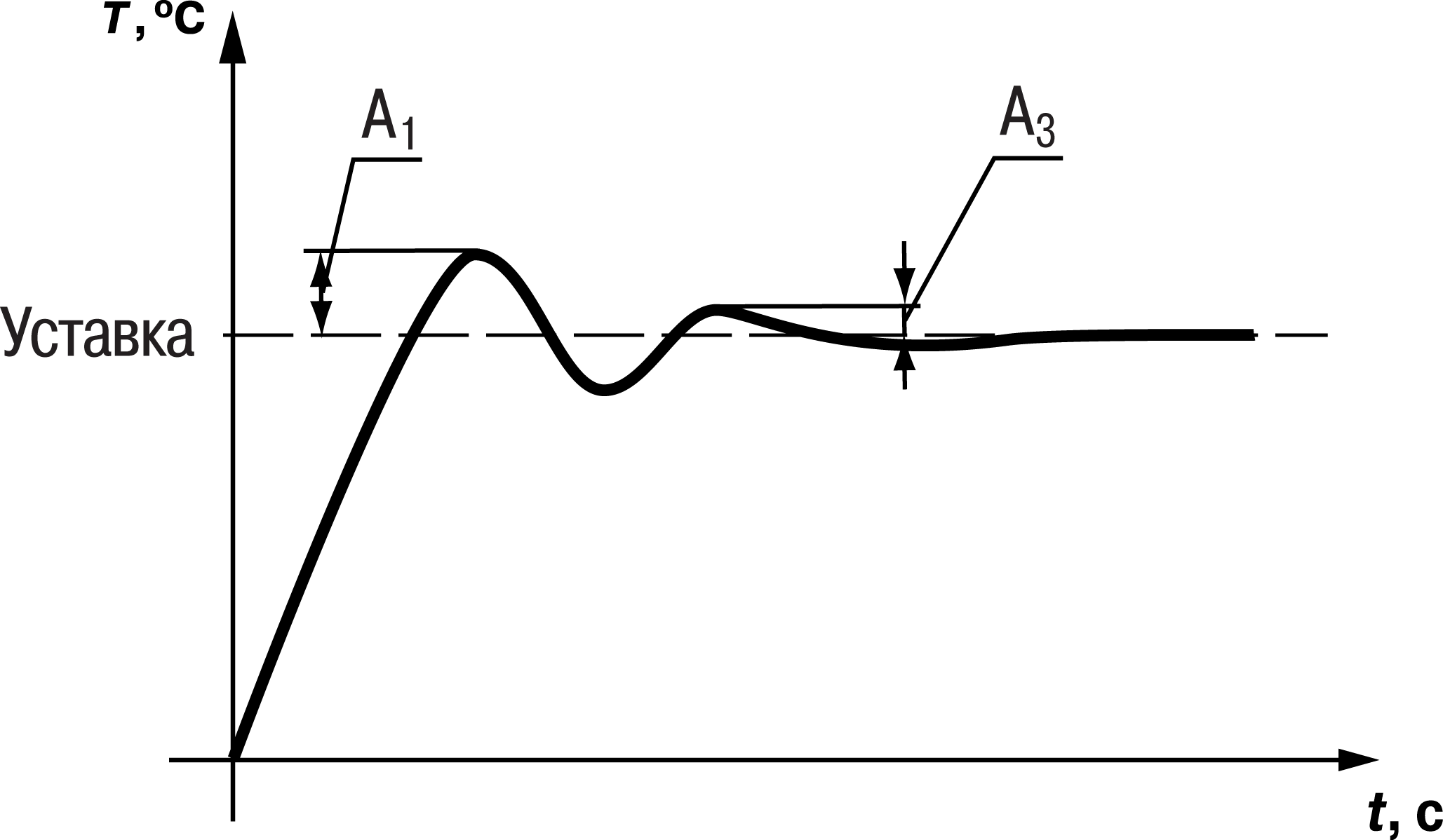
Ручная подстройка осуществляется итерационным методом с оценкой процесса по наличию колебаний и наличию перехода графика регулируемой величины через уставку.
В ряде случаев данные действия не могут обеспечить качественную настройку ПИД-регуляторов:
- системы с непрогнозируемыми внешними возмущающими воздействиями;
- системы с разнородными нагрузками (например, ГВС днем и вечером).