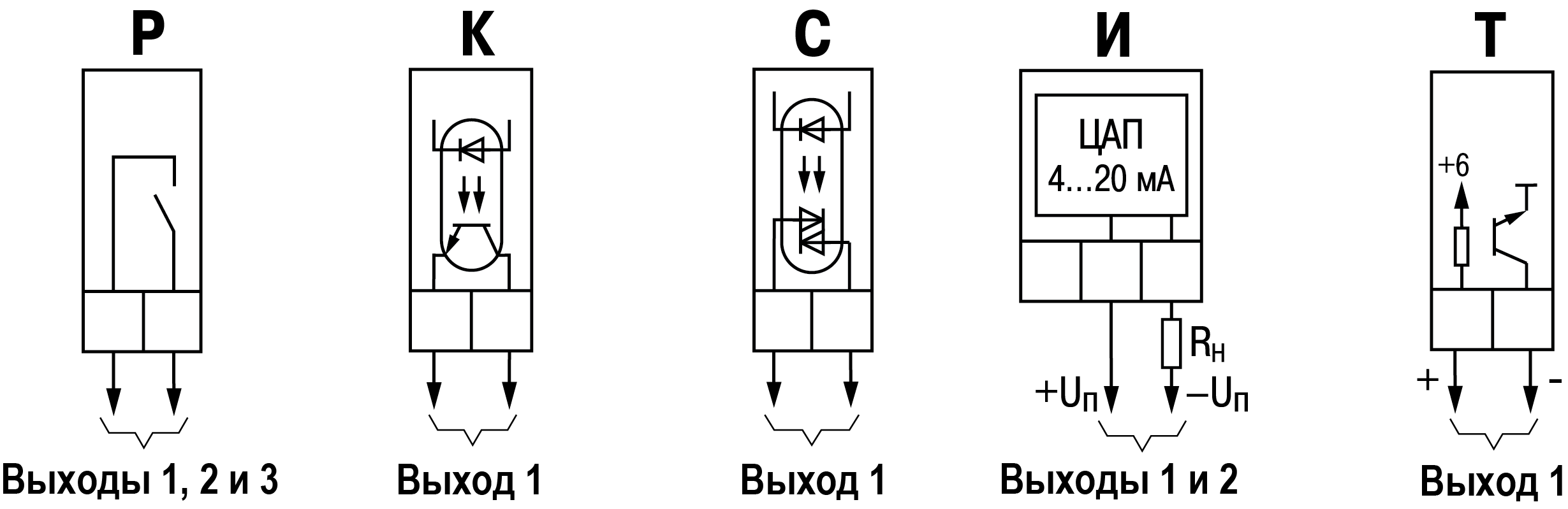
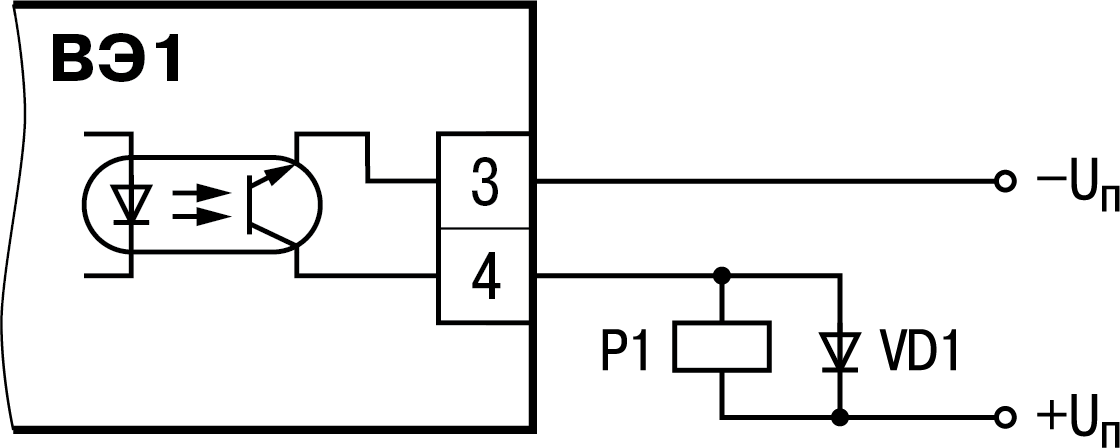
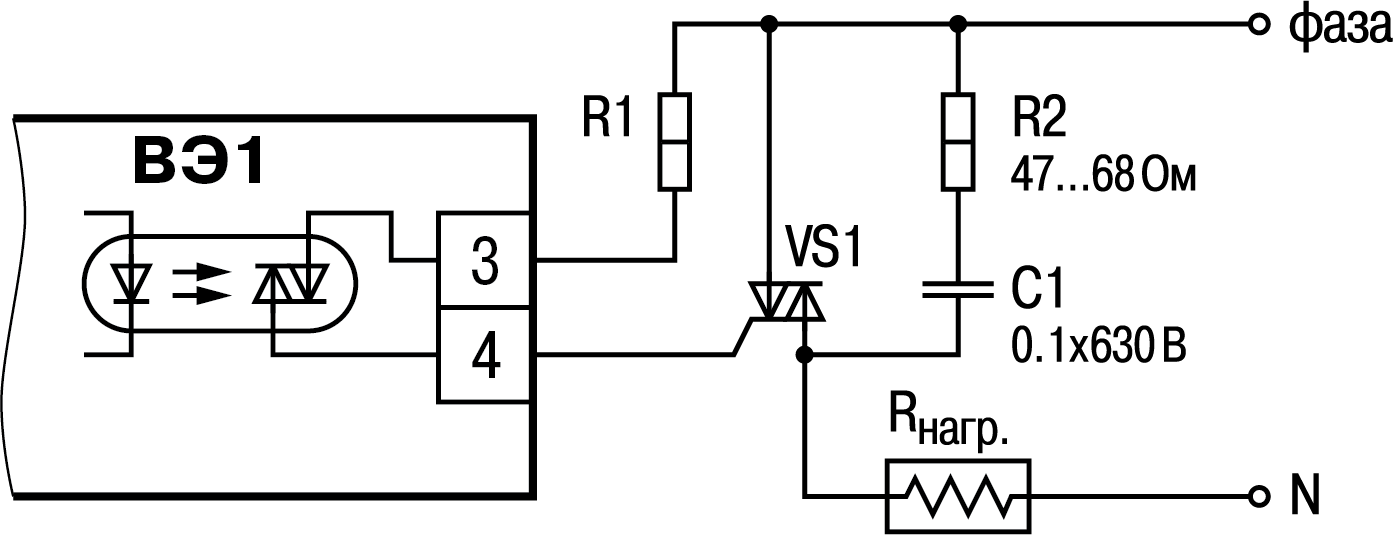
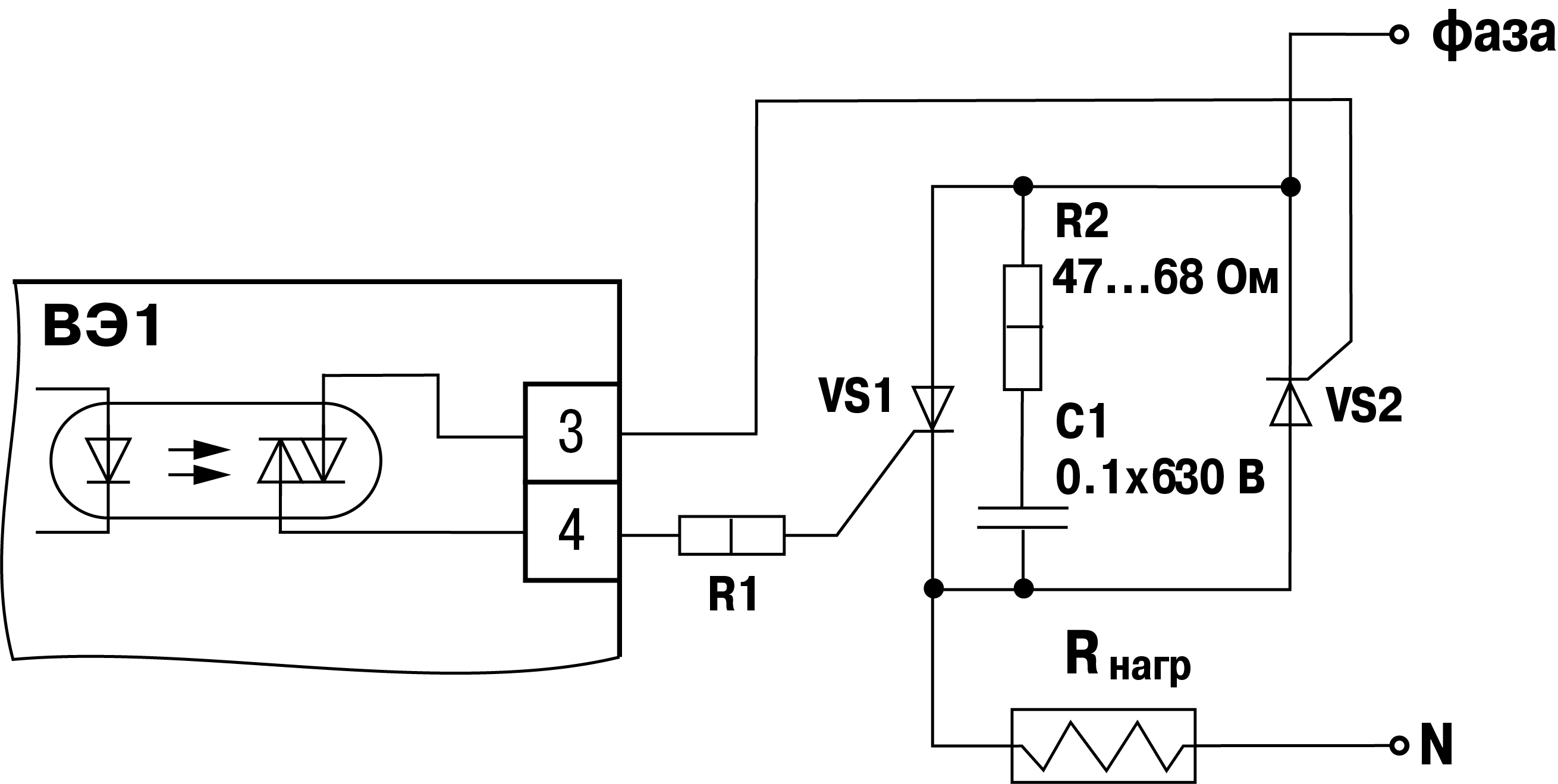
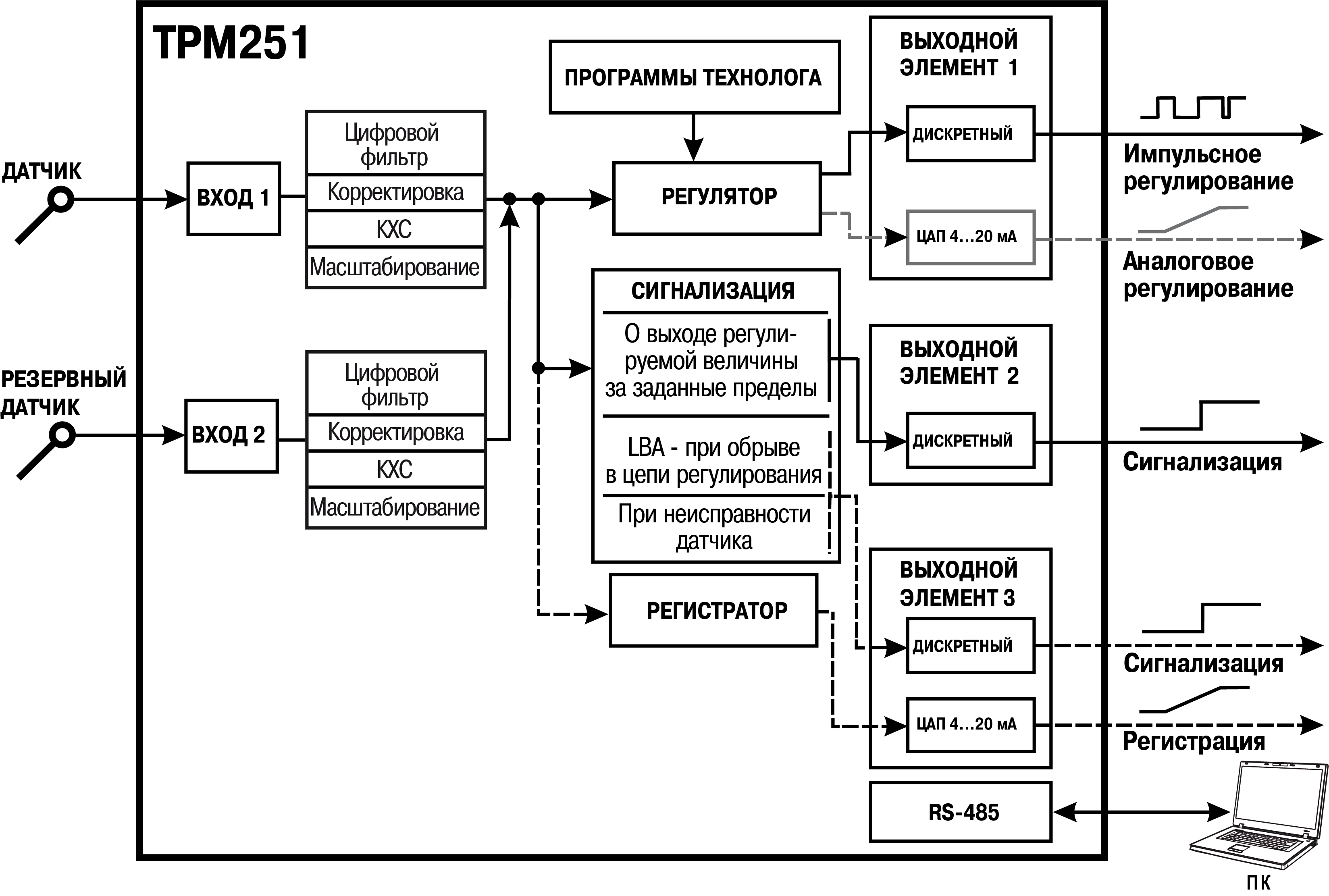
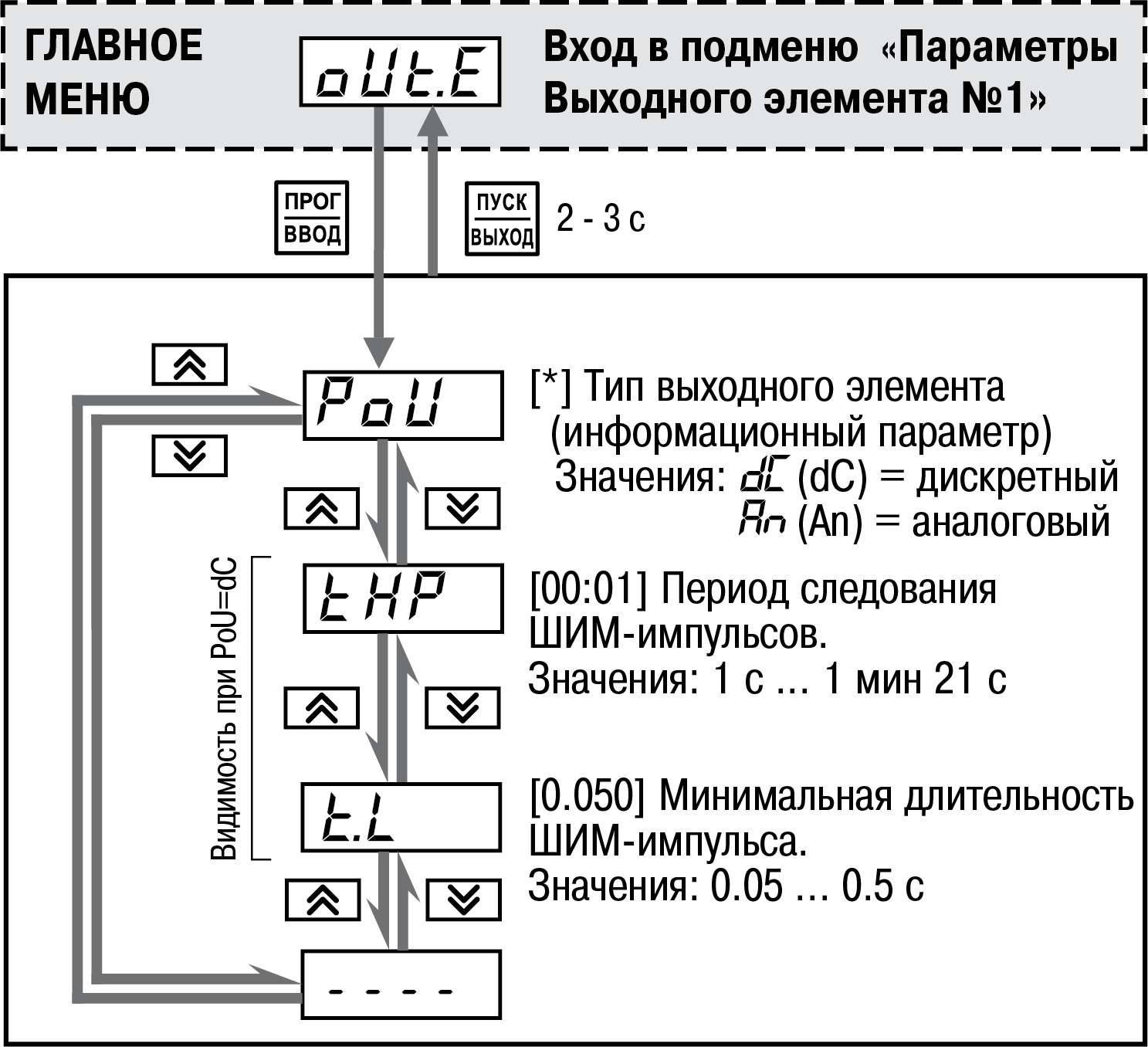
Выходной элемент (ВЭ) – программно-аппаратный модуль в составе
канала, служащий для подключения исполнительных механизмов.
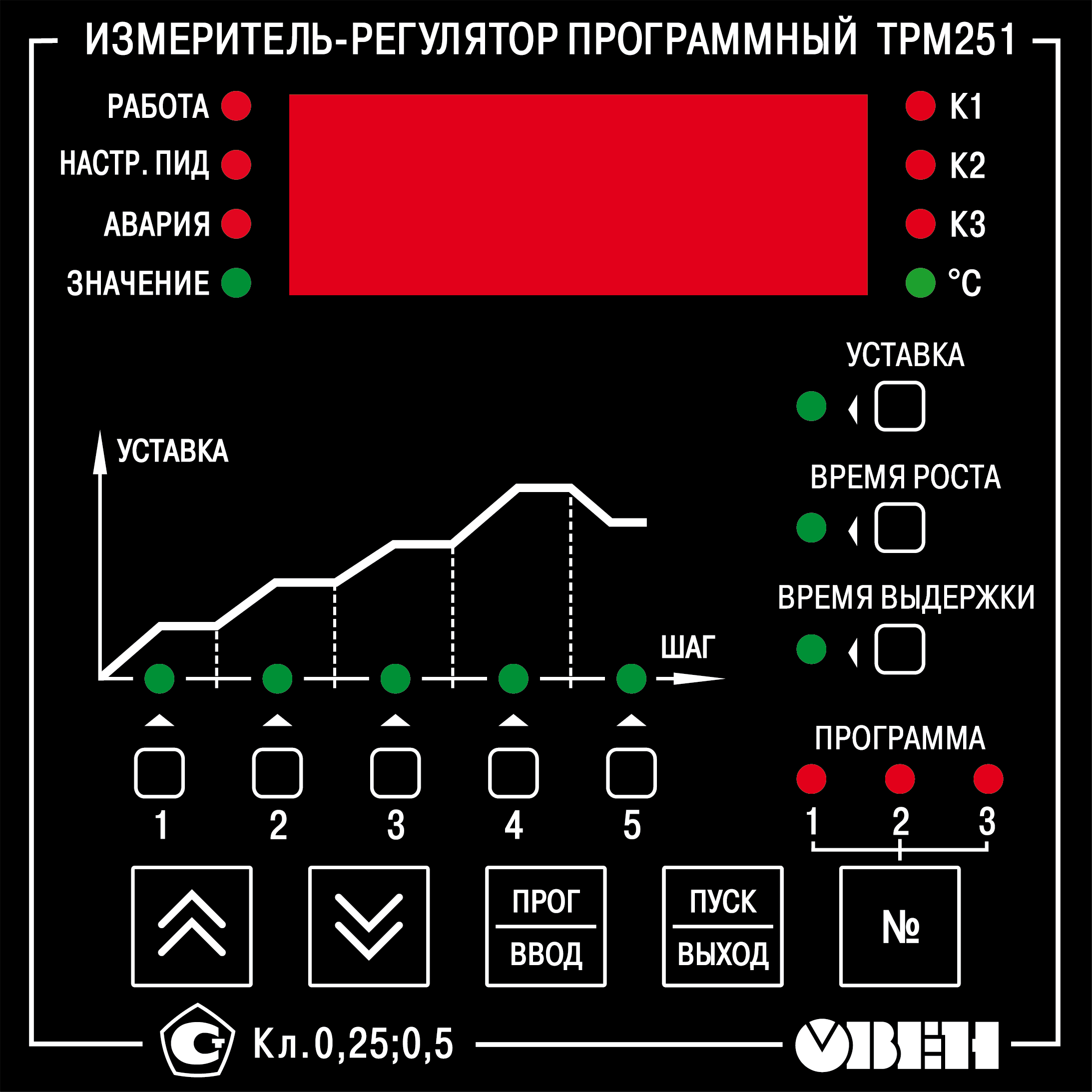
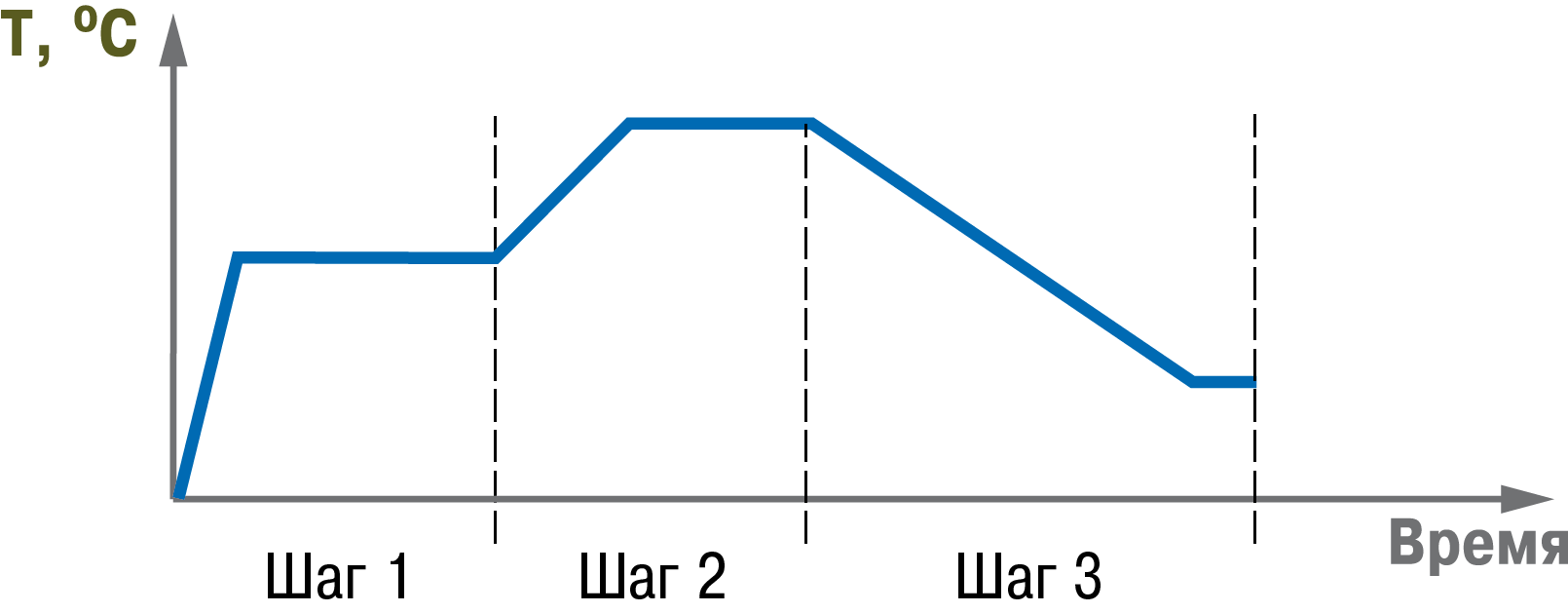
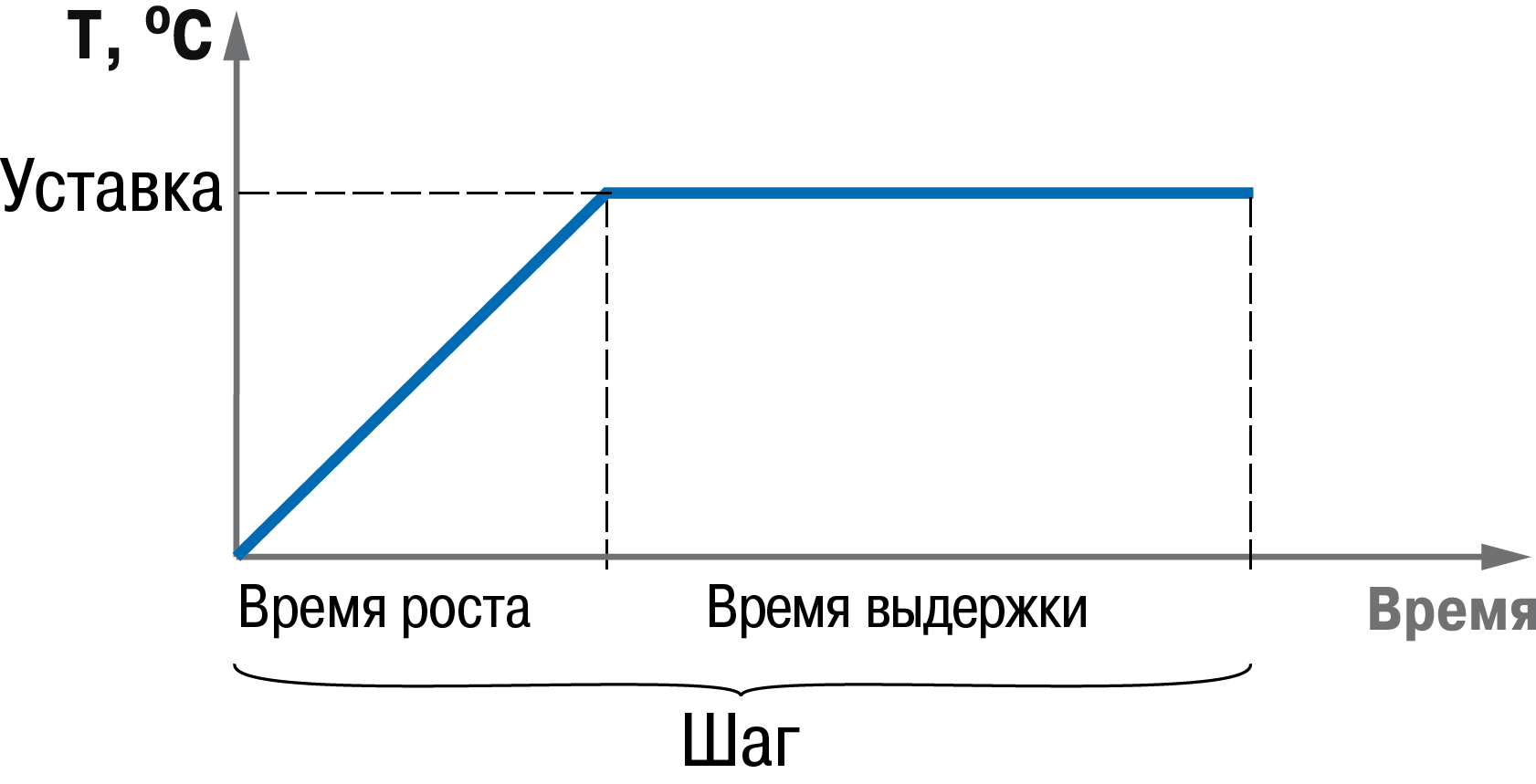
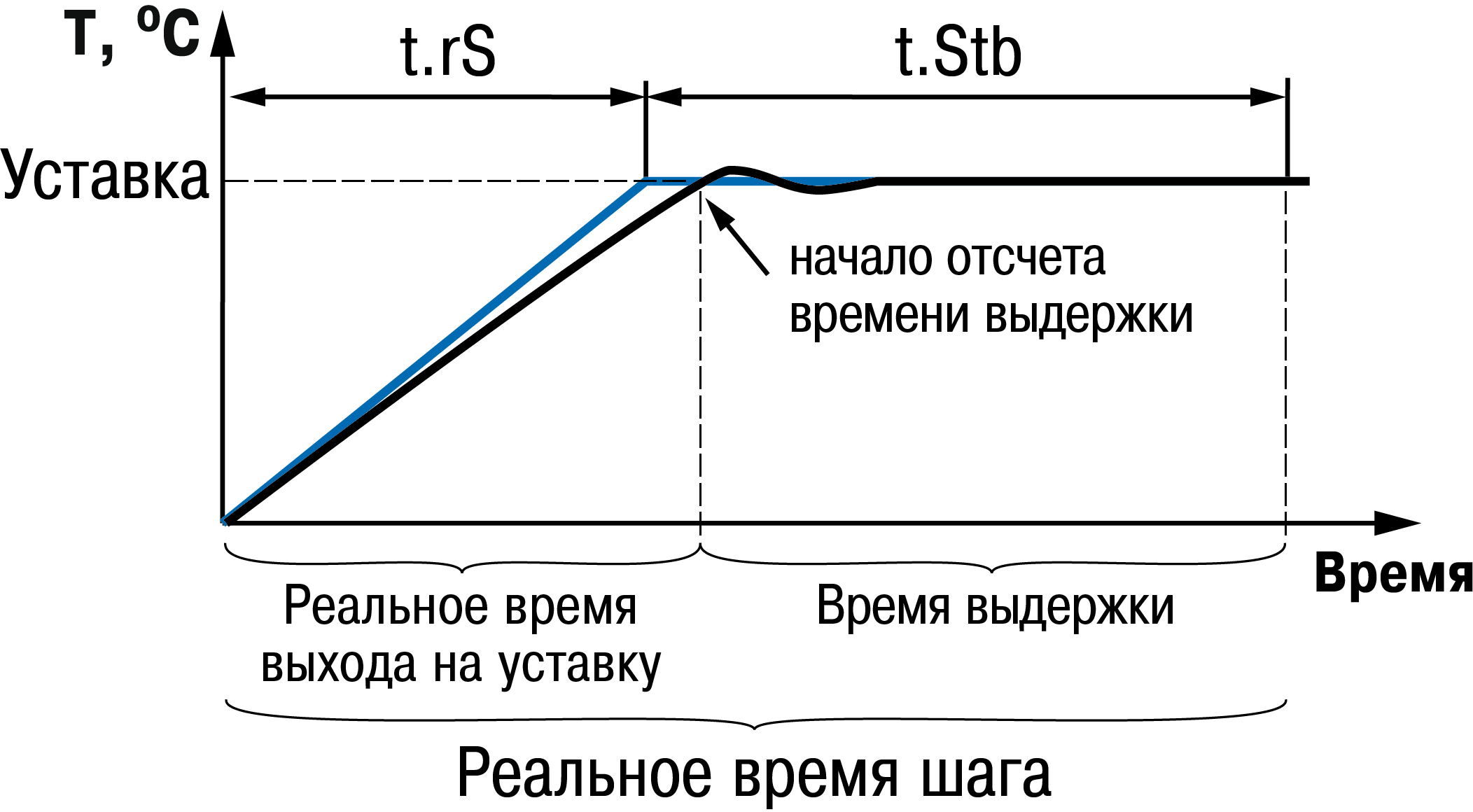
Время выдержки – время, в течение которого регулируемый
параметр поддерживается на уровне уставки.
Время роста – время выхода на уставку.
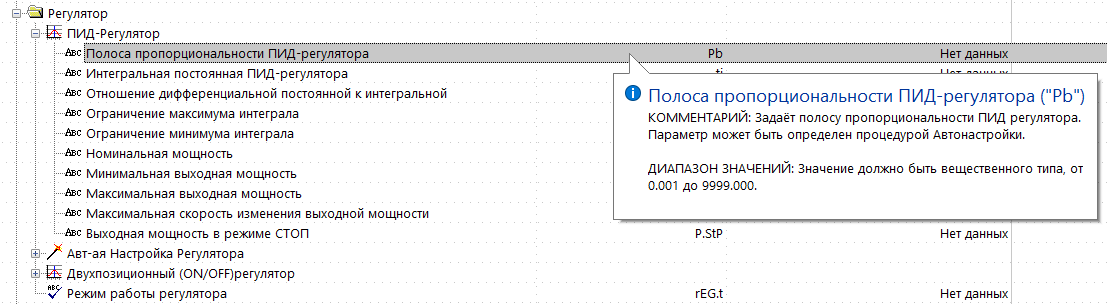
Имя параметра – набор символов, однозначно определяющий
параметр в приборе.
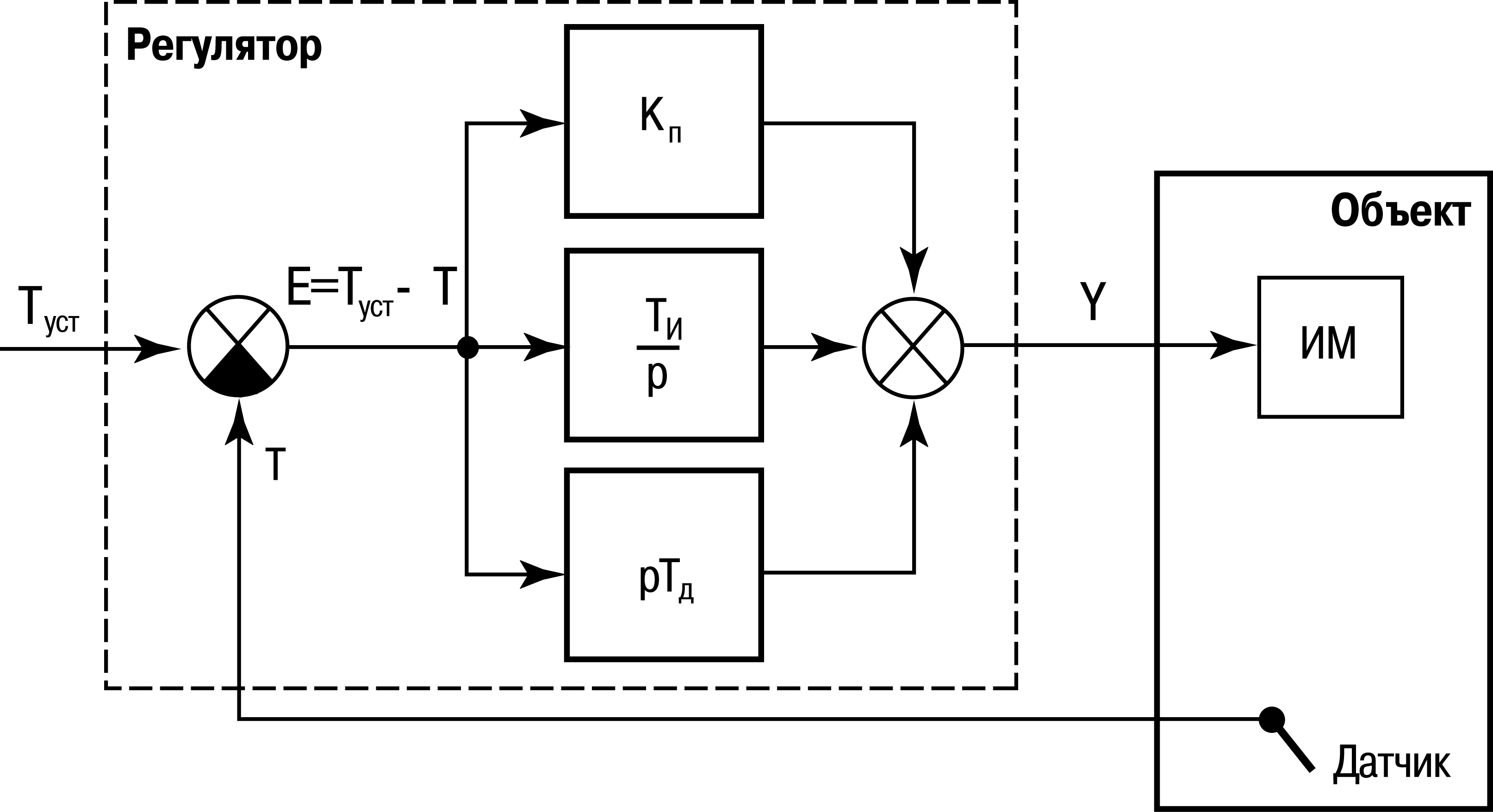
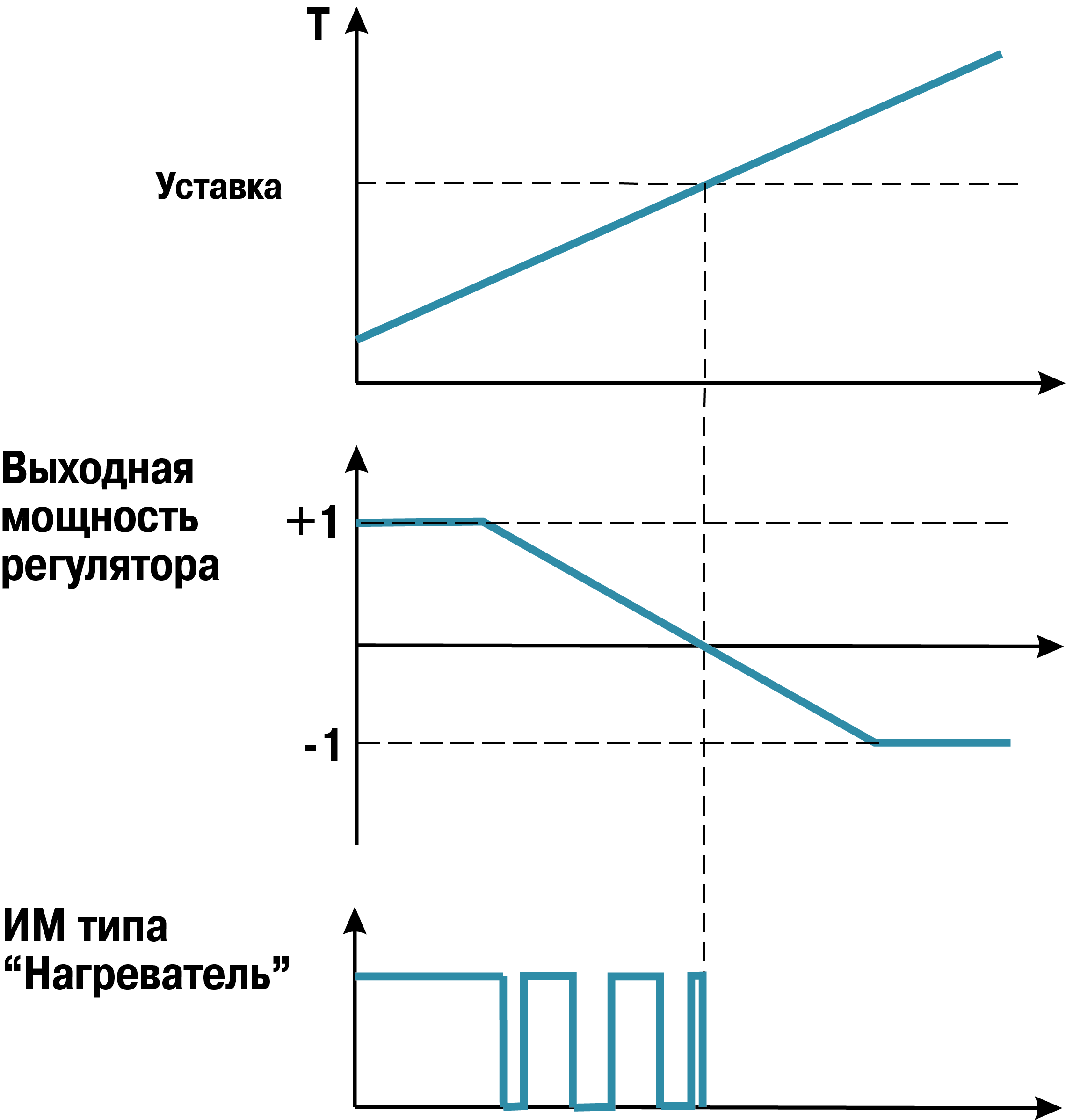
Исполнительный механизм (ИМ) – внешнее устройство, функционирующее
под управлением прибора. Изменяет регулируемую величину по команде
от прибора.
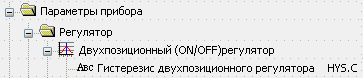
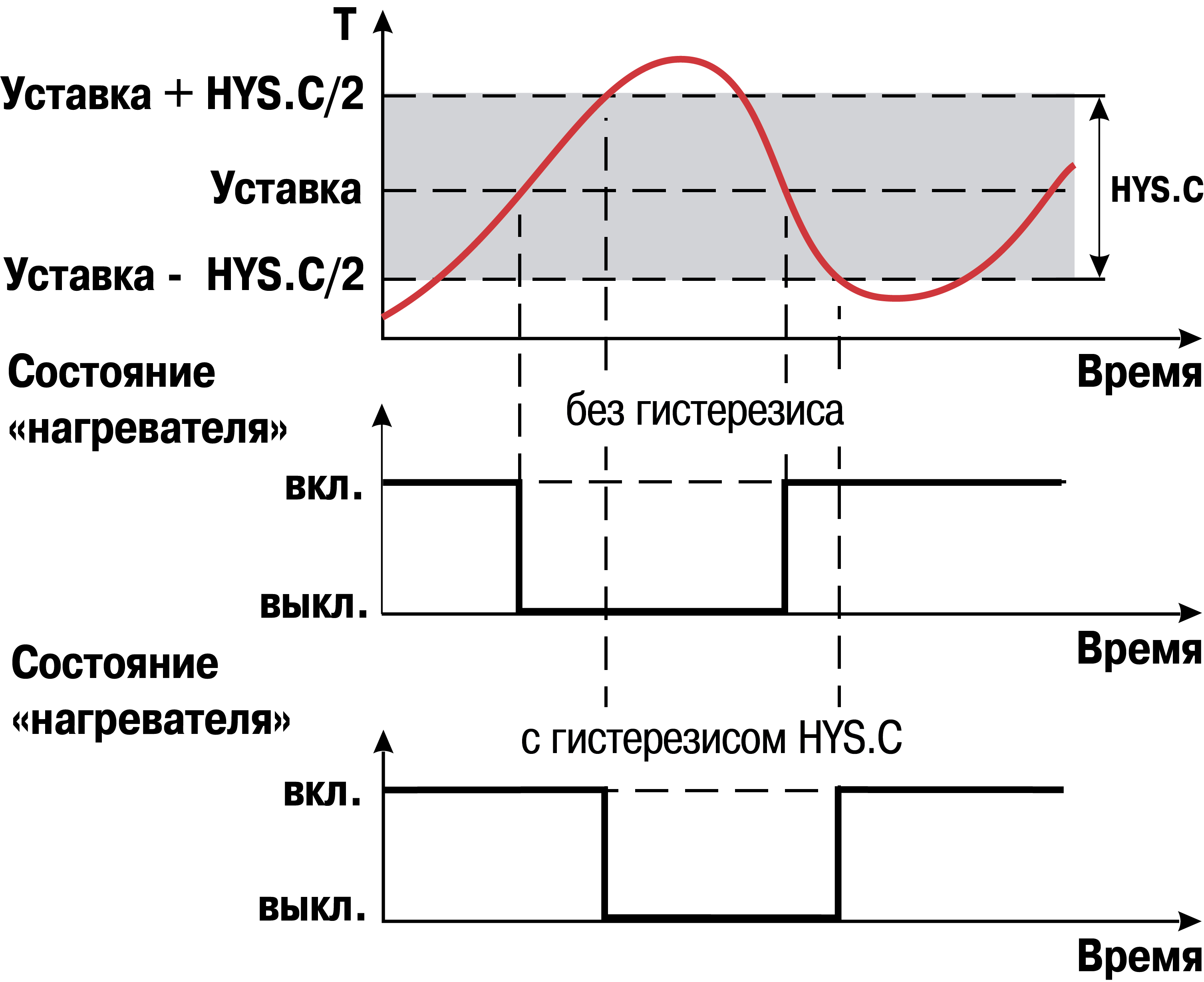
Исполнительный механизм двухпозиционный – исполнительный
механизм, имеющий два положения: «ВКЛ» и «ВЫКЛ».
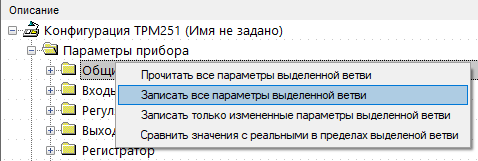
Конфигурация – совокупность значений параметров, определяющих
работу прибора.
Мгновенная уставка – уставка, рассчитанная прибором на данный
момент времени.
Название параметра – словесное описание параметра, отражающее
его суть.
«Нагреватель» – исполнительный механизм, увеличивающий значение
регулируемой величины.
Начальный шаг – шаг, с которого начинается выполнение Программы
технолога.
Параметры оперативные – данные о текущем состоянии и процессе
работы прибора.
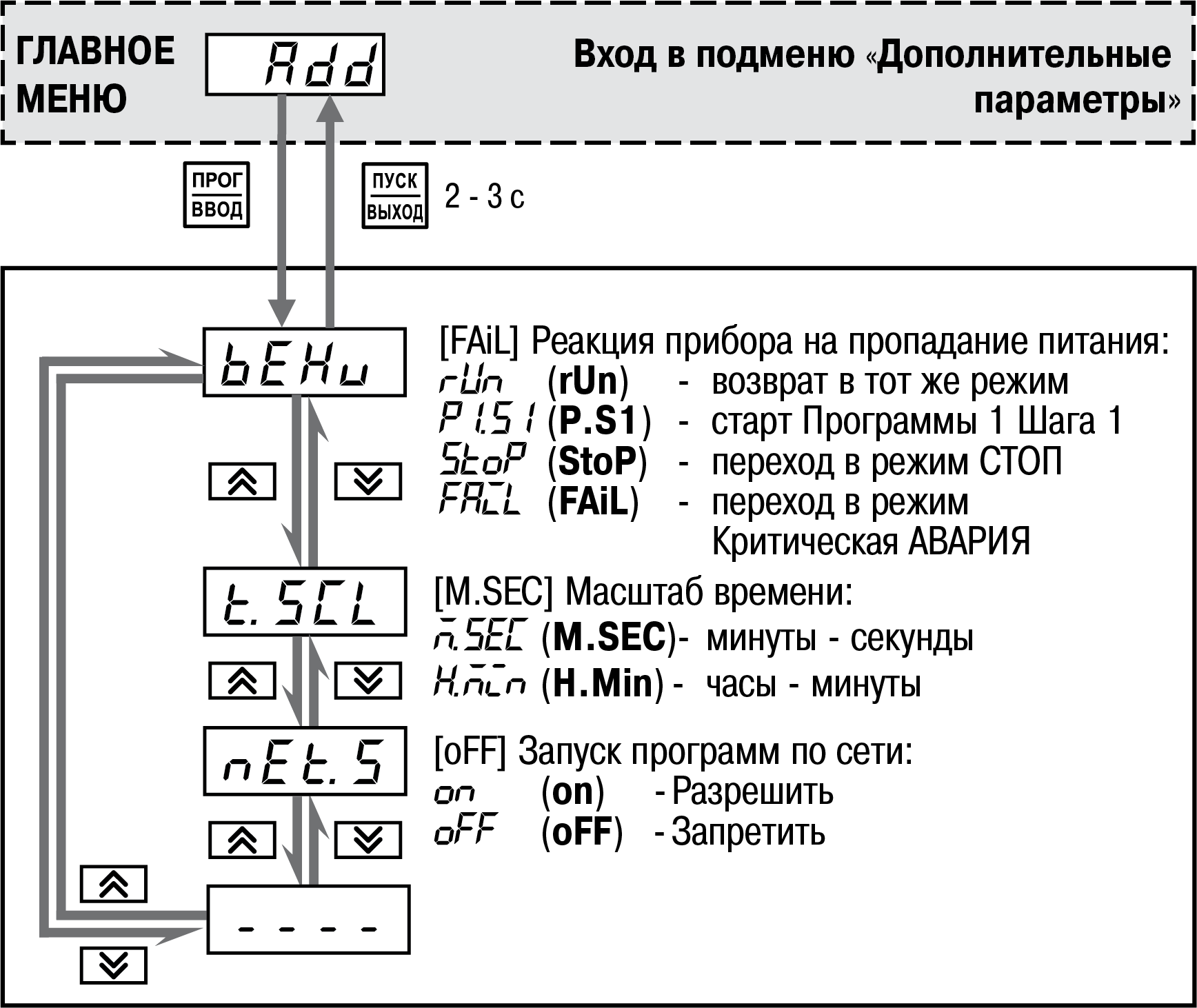
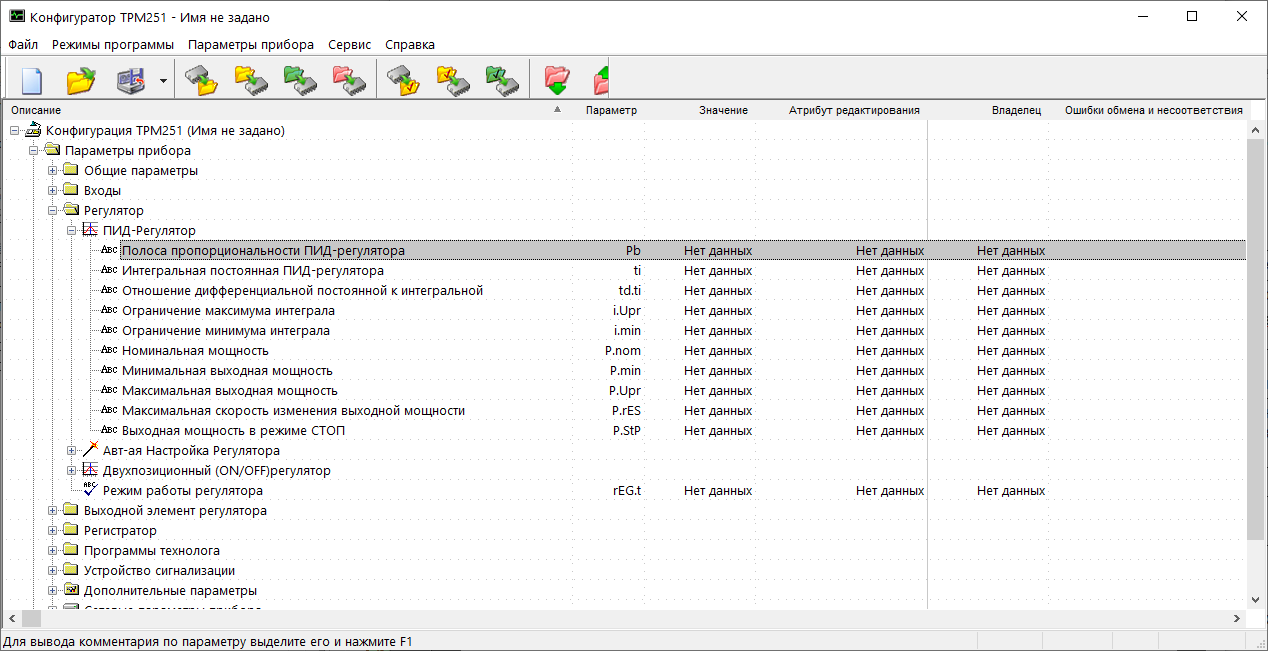
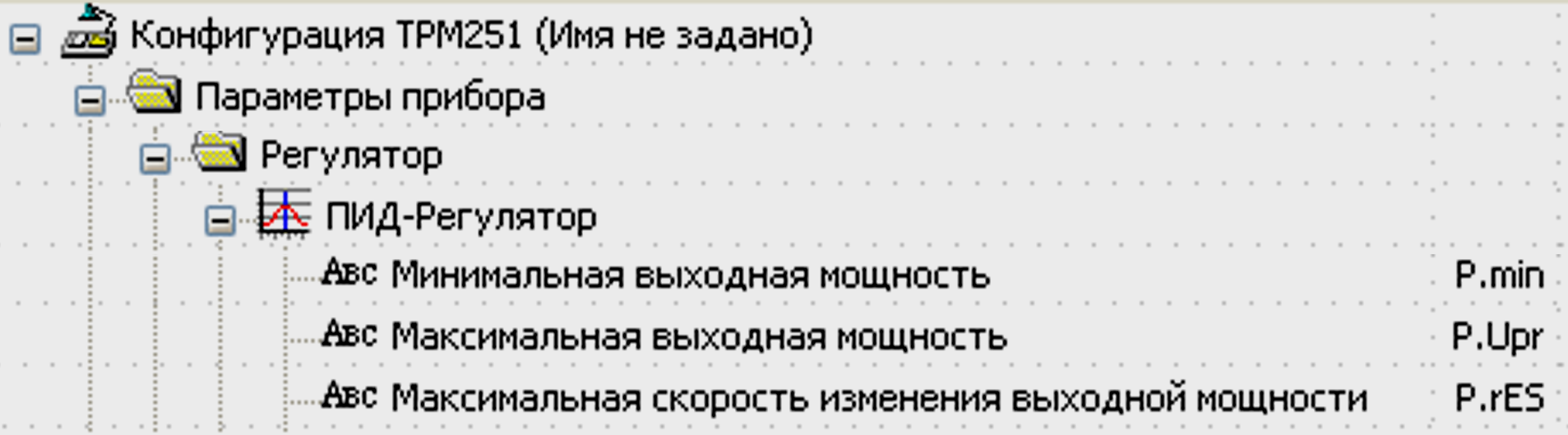
Параметры настраиваемые (конфигурационные) – параметры,
определяющие конфигурацию прибора (задаются с помощью программы-конфигуратора
или с лицевой панели).
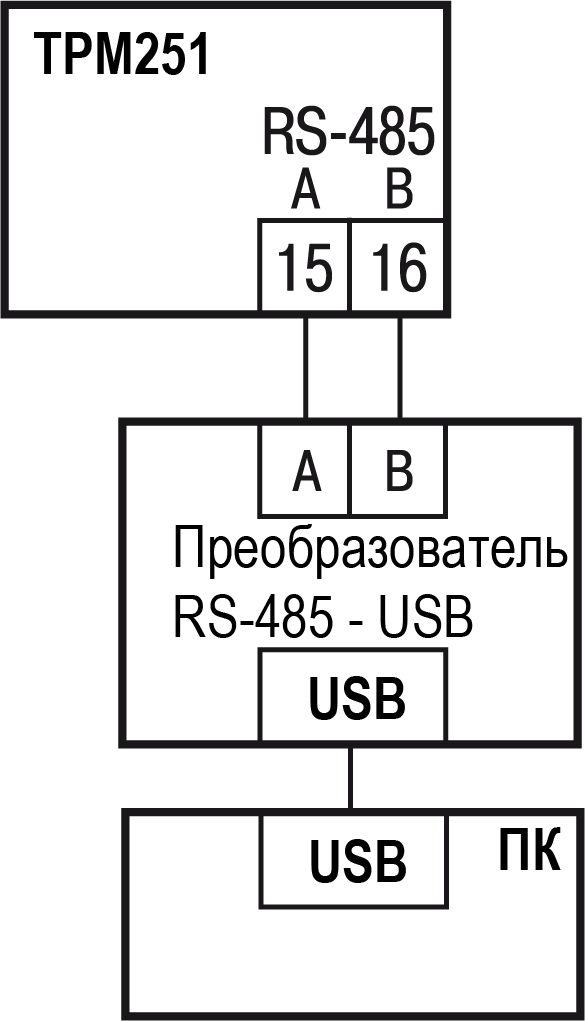
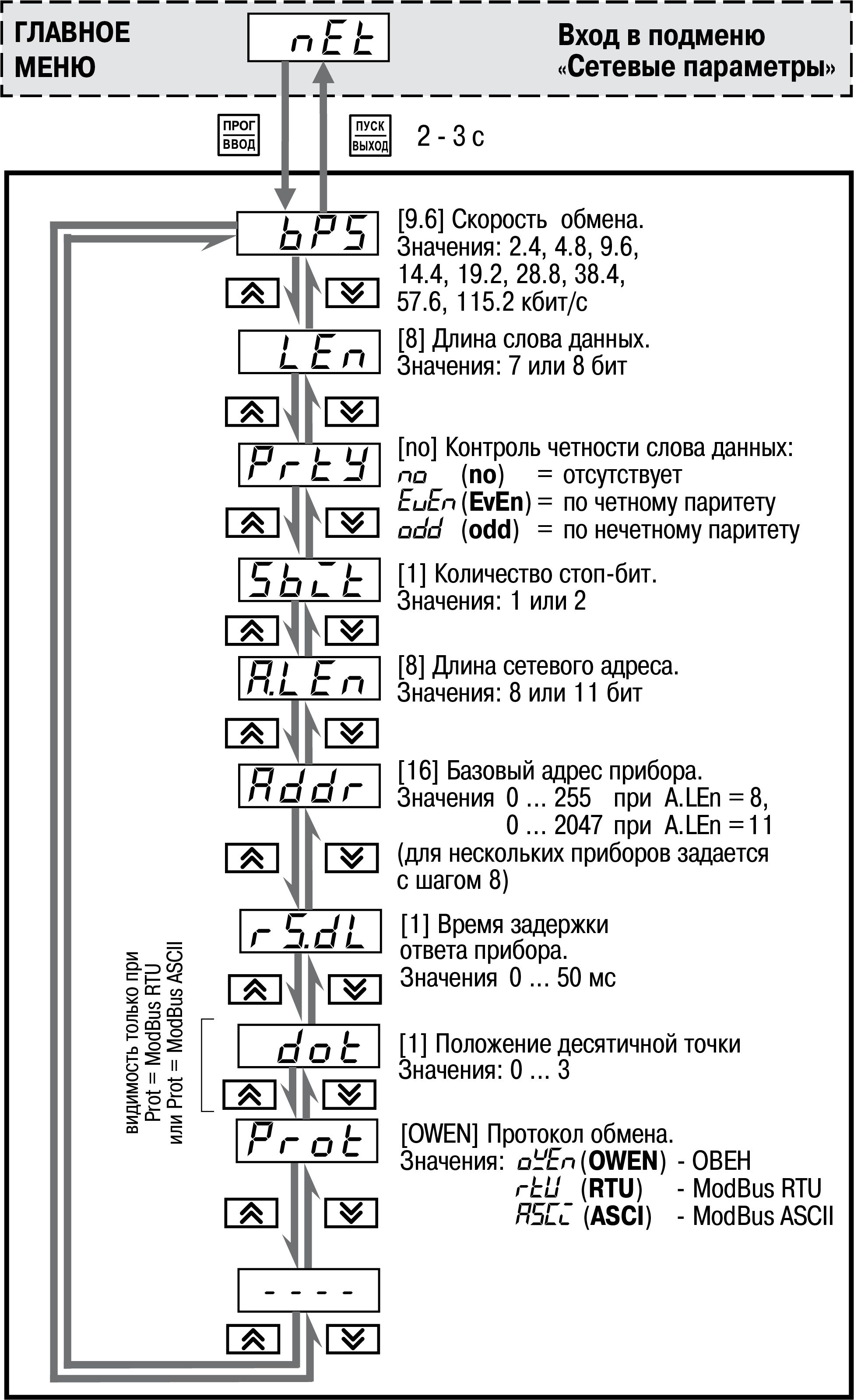
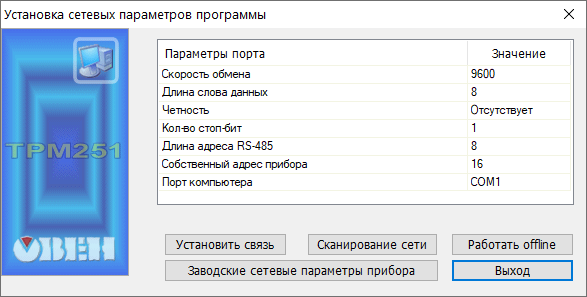
Параметры сетевые – специальные конфигурационные параметры,
определяющие работу прибора в сети через интерфейс RS-485.
Программа технолога – последовательность этапов технологического
процесса.
Программный модуль – блок алгоритма прибора, предназначенный
для выполнения конкретного действия.
Шаг Программы технолога – этап технологического процесса.
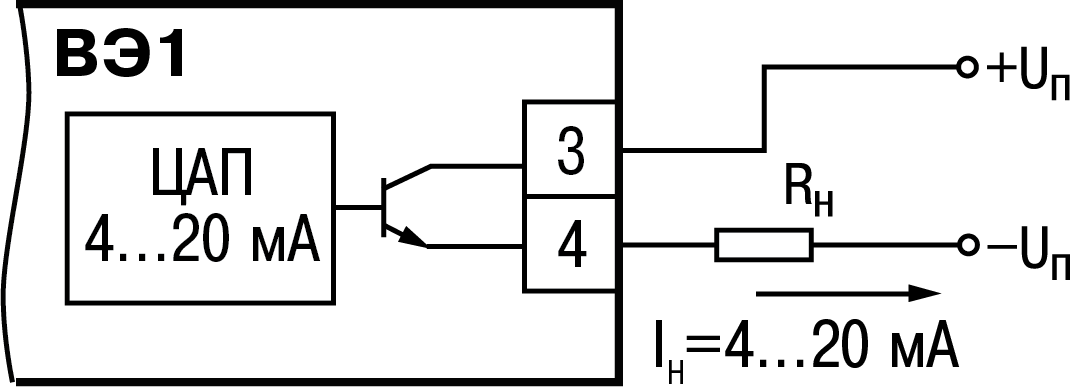
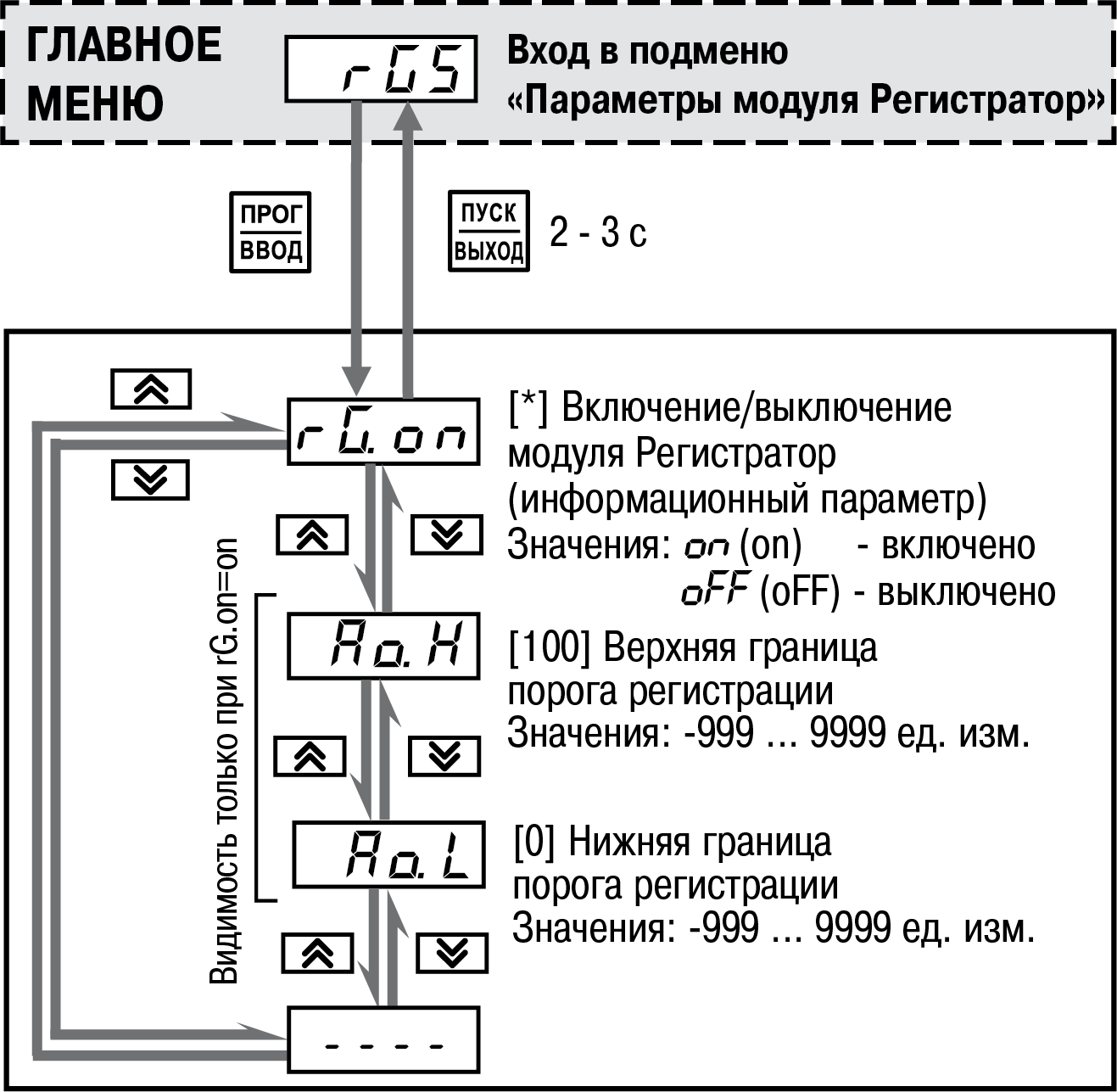
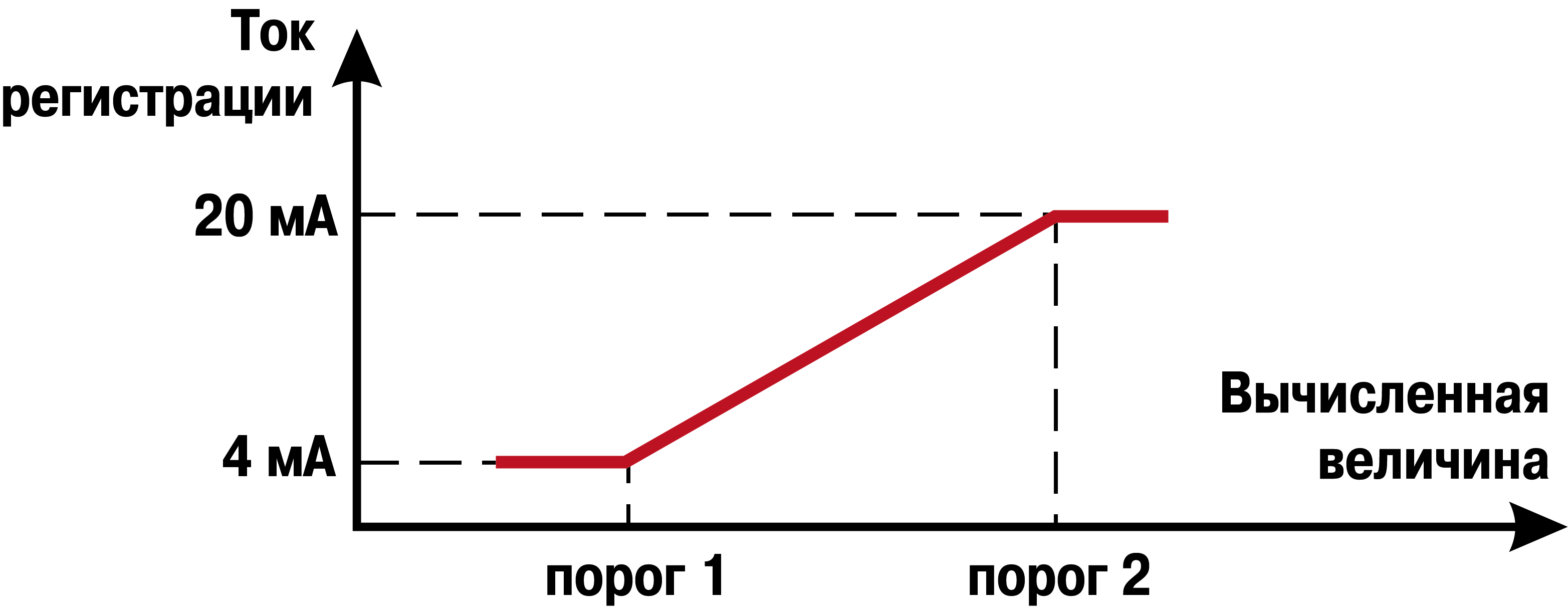
Регистратор – программный модуль, предназначенный для преобразования
измеренного сигнала в аналоговый, и передачи сигнала на ВЭ типа «цифроаналоговый
преобразователь».
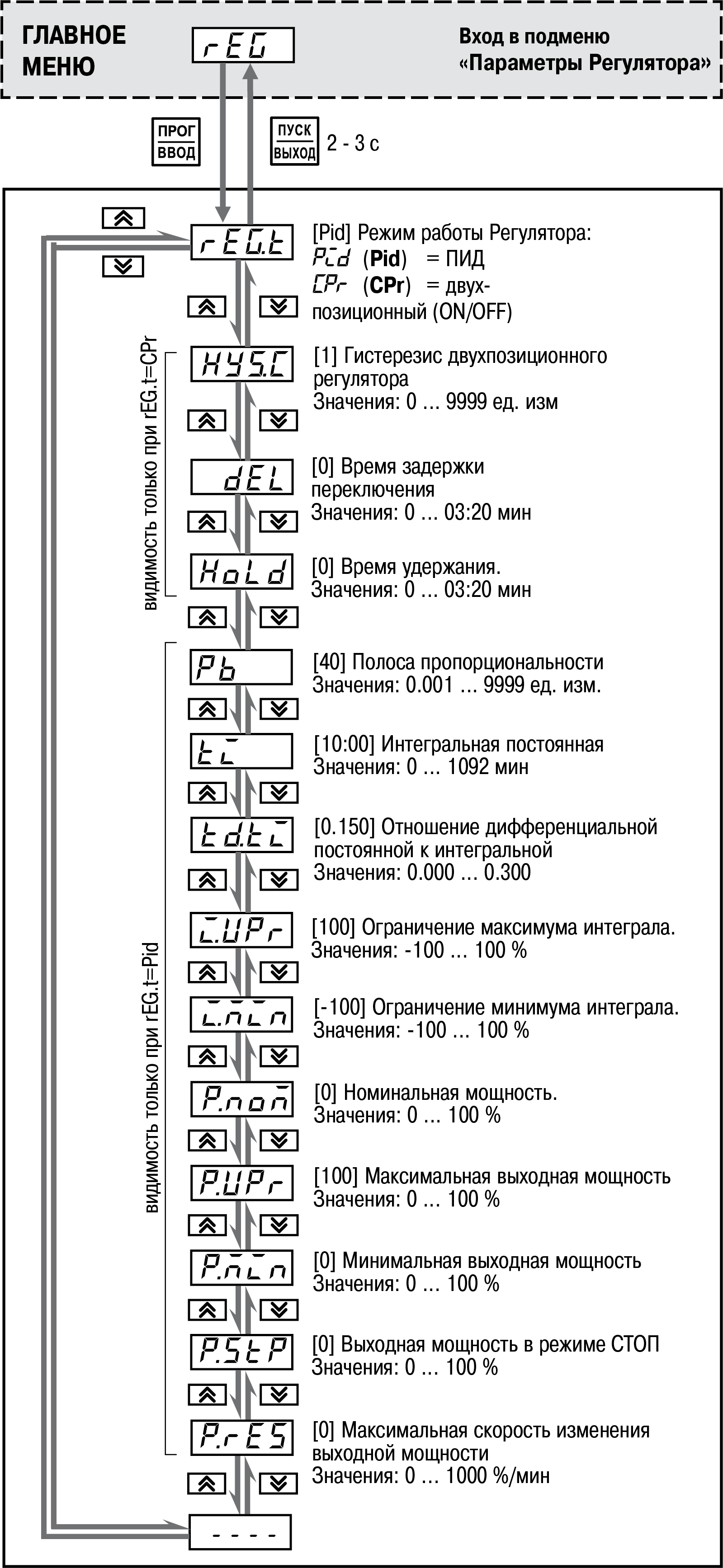
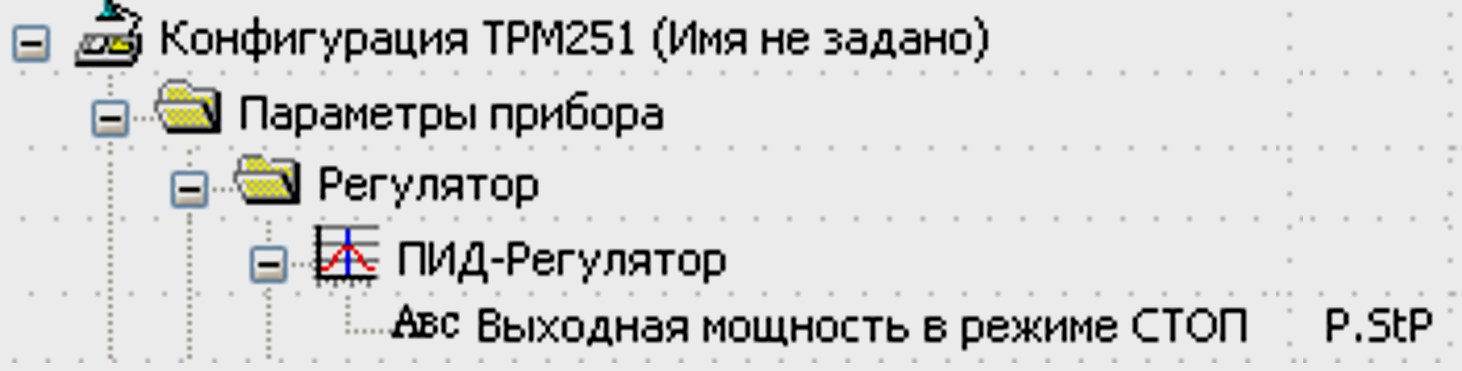
Регулятор – программный модуль в составе канала, который
поддерживает измеренную или вычисленную величину на заданном уровне.
Уставка – заданное значение (диапазон значений), в пределах
которого прибор поддерживает измеренный сигнал или вычисленную величину.
Формат данных – тип значений параметров. Различают следующие
форматы: целое число, число с плавающей точкой и другие.
EEPROM (Electrically Erasable Programmable Read-Only Memory) – электрически стираемое перепрограммируемое ПЗУ (ЭСППЗУ).
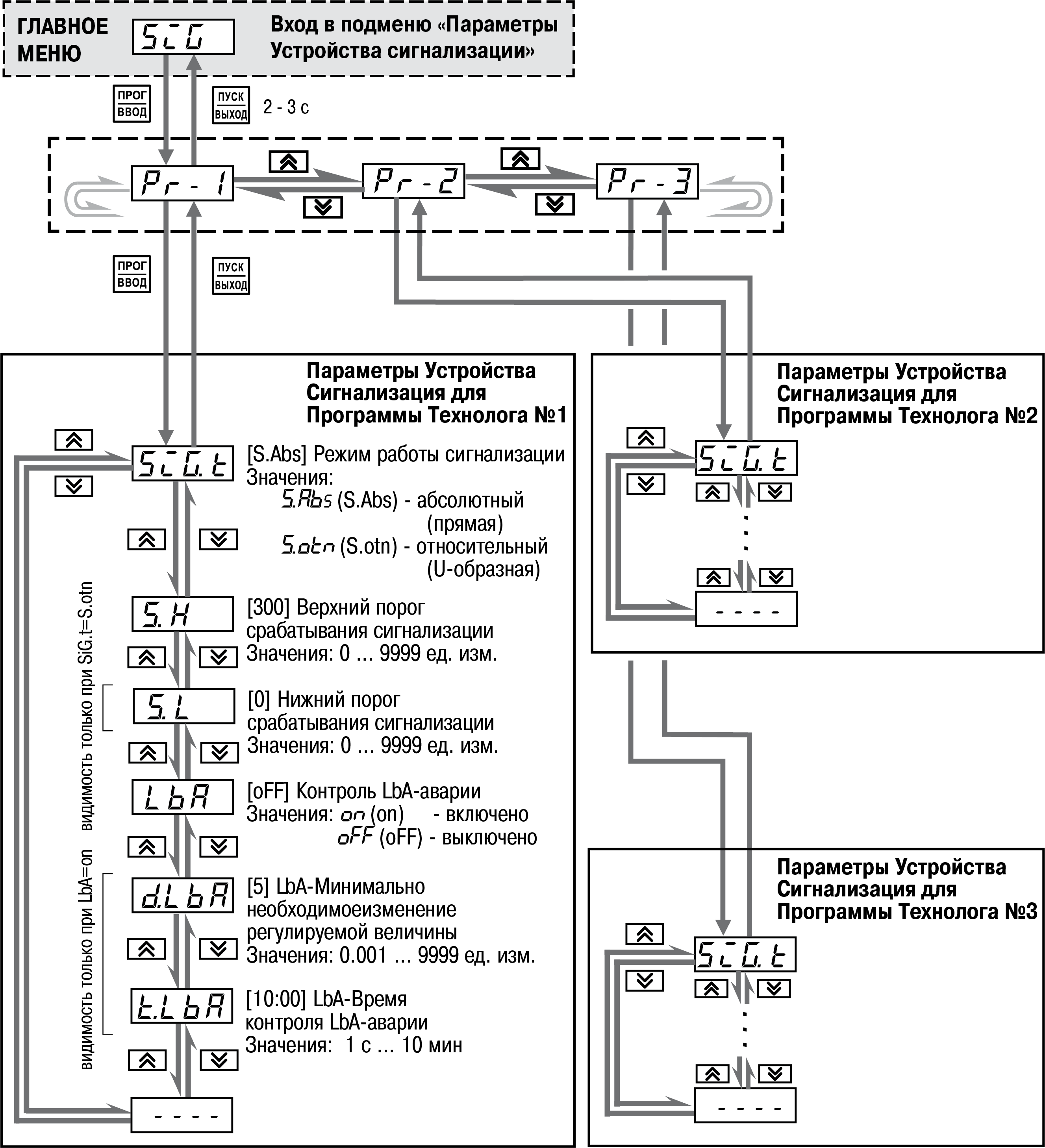
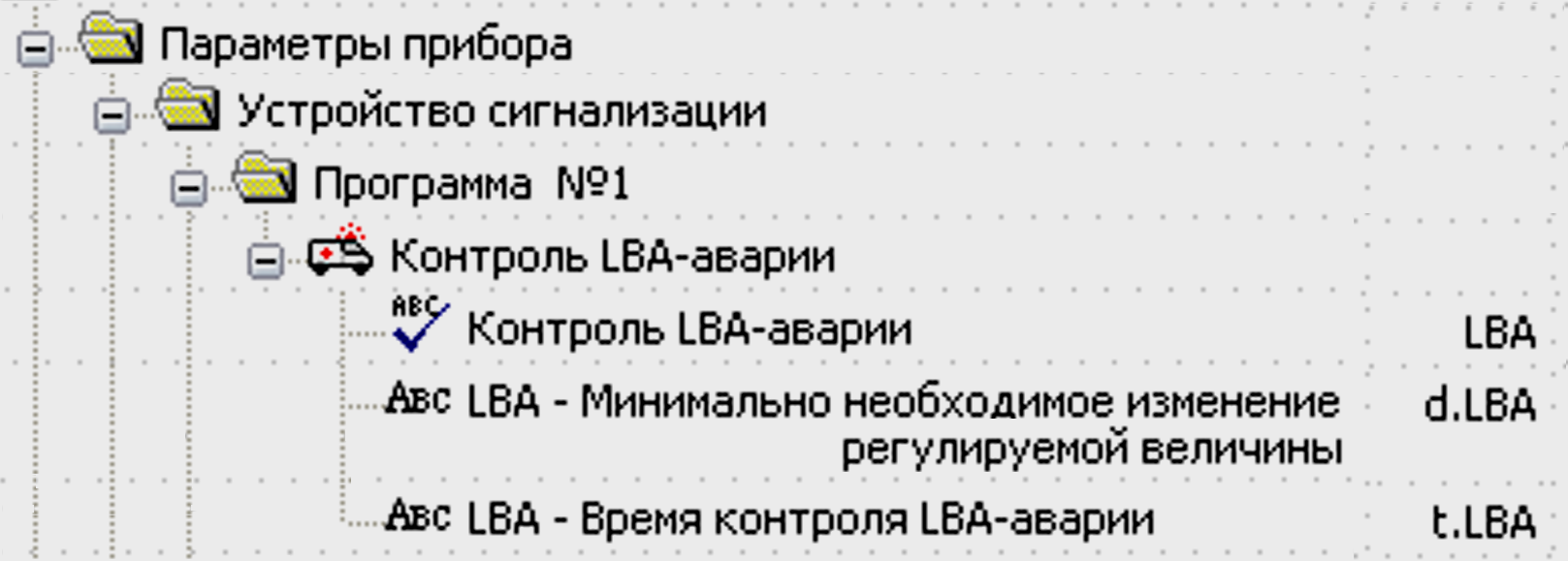
LBA (Loop Break Alarm) – авария обрыва контура регулирования.
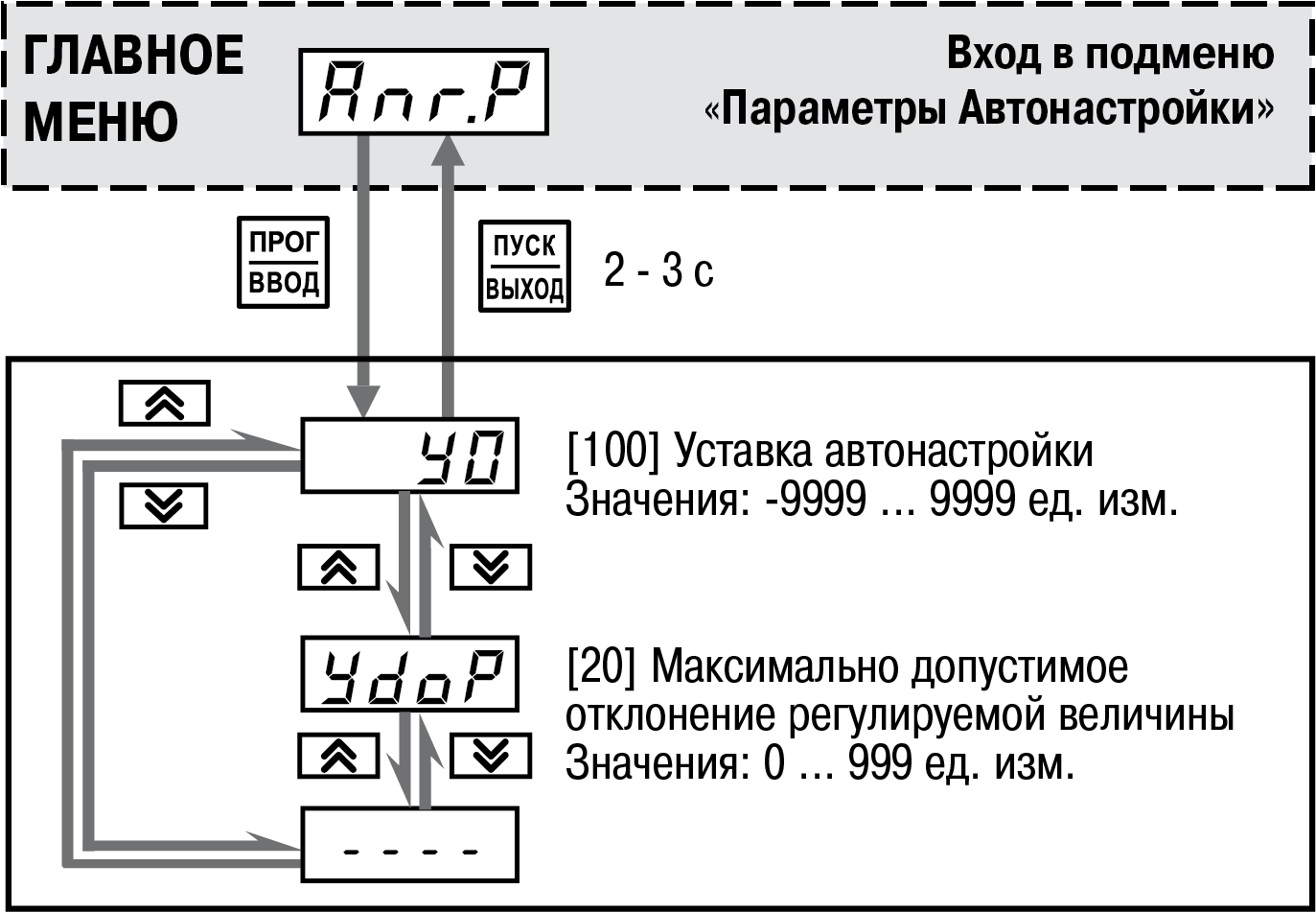
АНР – автоматическая настройка регулятора.
АЦП – аналого-цифровой преобразователь.
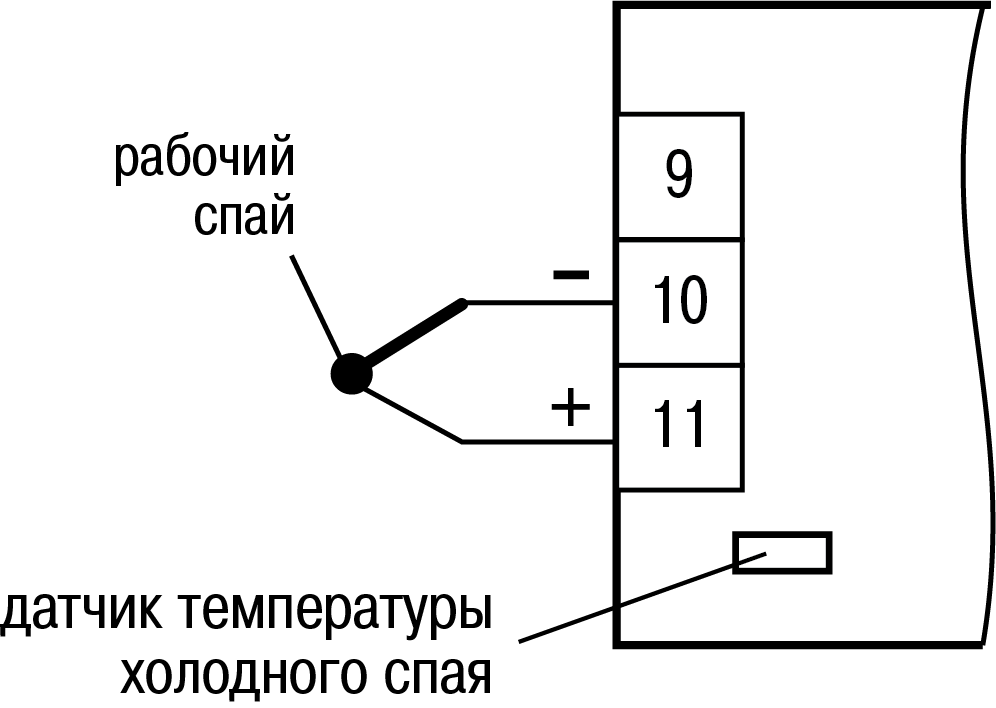
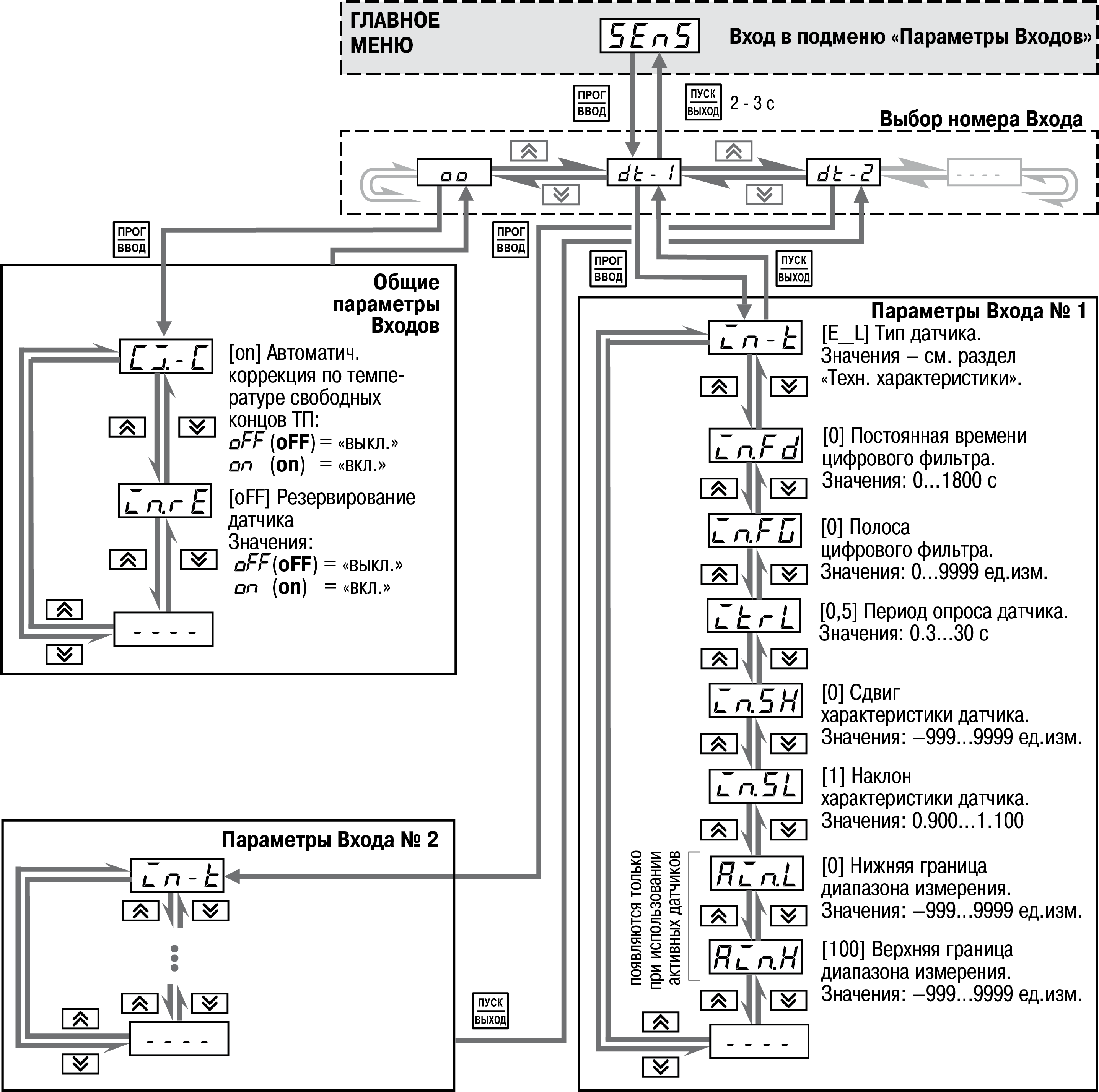
КХС – компенсация «холодного спая».
НСХ – номинальная статическая характеристика.
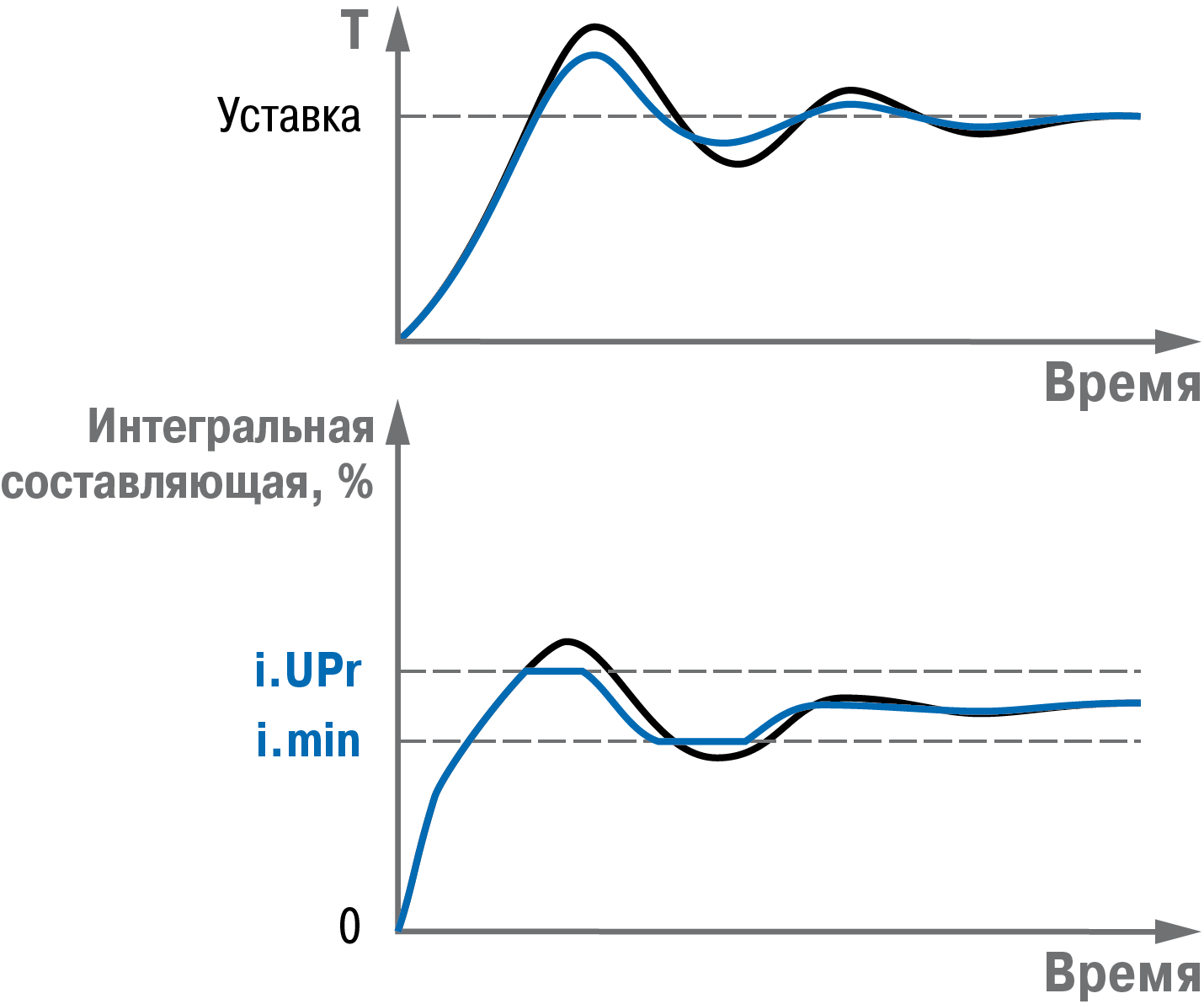
ПИД (-регулятор) – пропорционально-интегрально-дифференциальный
(регулятор).
ПК – персональный компьютер.
ТКС – температурный коэффициент электрического сопротивления.
ТП – термопара (преобразователь термоэлектрический).
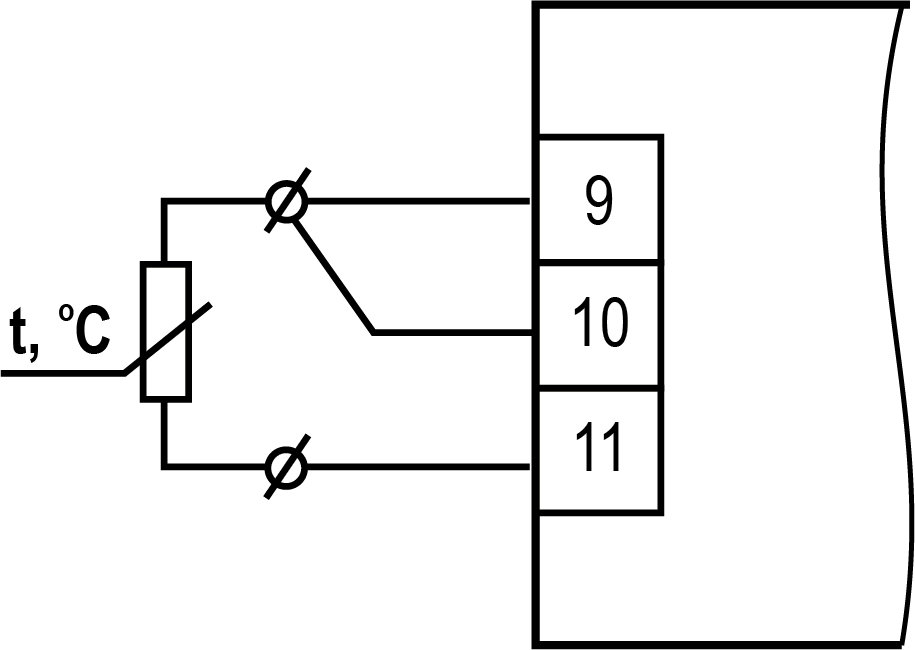
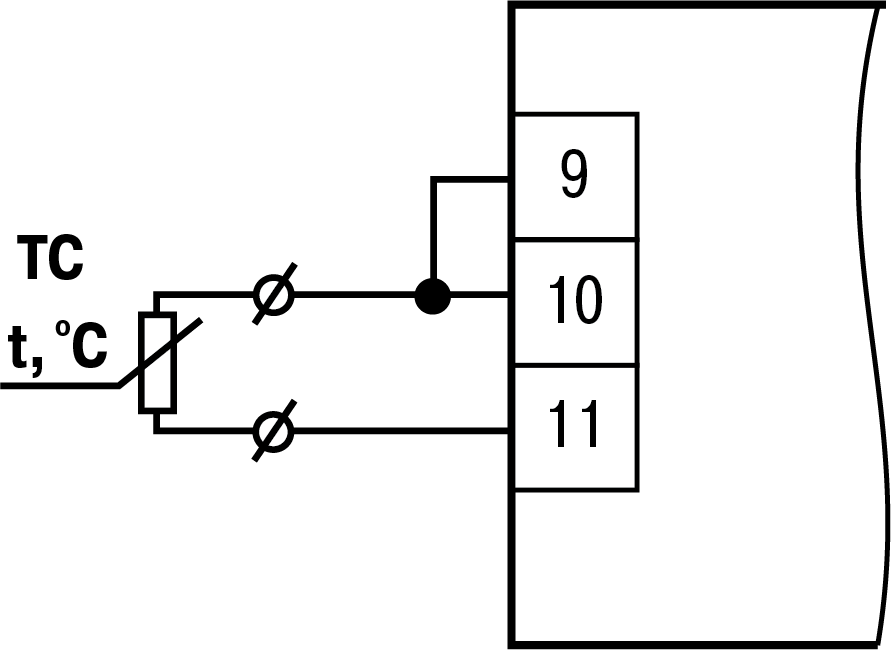
ТС – термометр сопротивления.
ЦАП – цифро-аналоговый преобразователь.
ЦИ – цифровой индикатор.
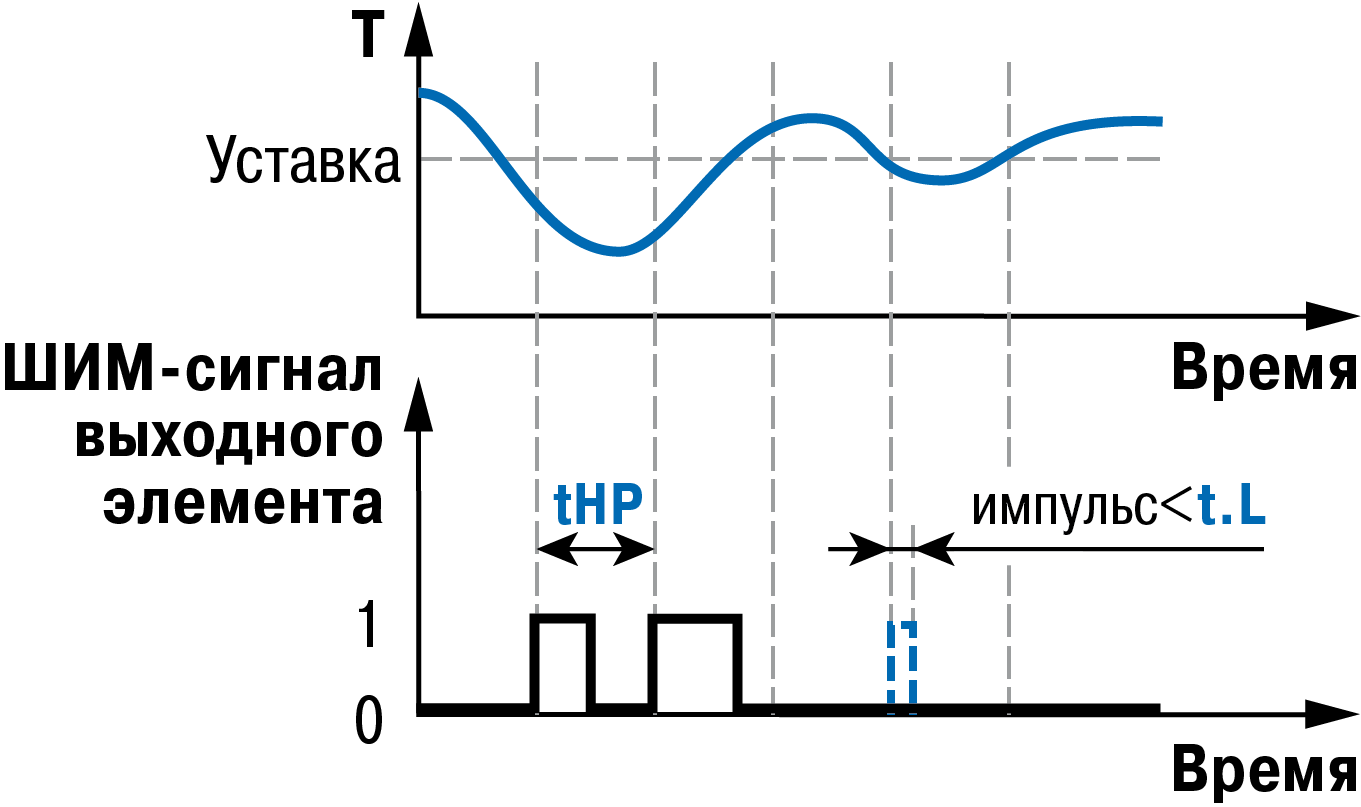
ШИМ – широтно-импульсная модуляция.
ЭДС – электродвижущая сила.