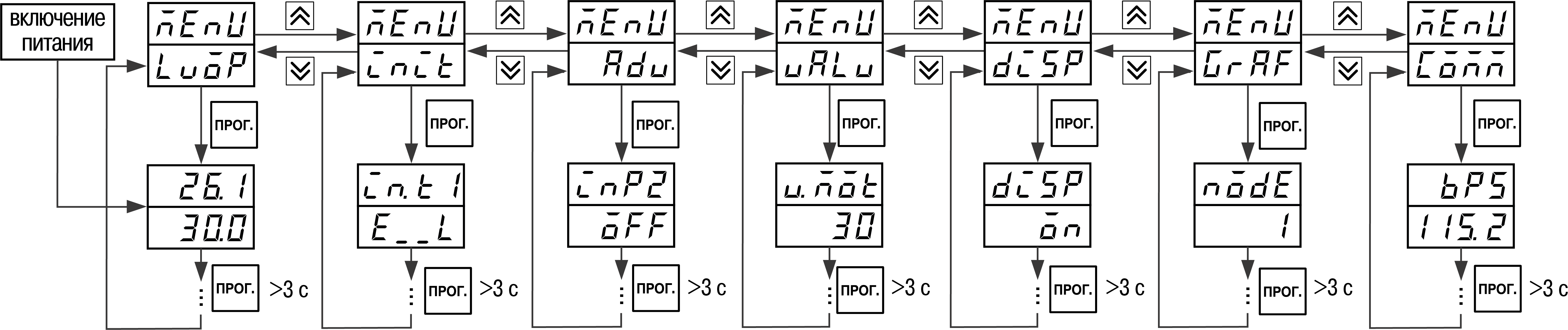
Группа LVOP (LVOP). Рабочие параметры прибора |
PV1, PV2 (PV1, PV2) | Измеренная величина на Входе 1*, на
Входе 2** | Диапазон измерения датчика 1, датчика
2 | [ед. изм.] Параметры не настраиваются | — |
LUPV (LUPV) | Значение на выходе вычислителя* | Ограничения на цифровом индикаторе –1999…9999 | — |
SP (SP) | Уставка регулятора* | Определяется параметрами SL-L и SL-H | На ЦИ
обозначение параметра не отображается | 30.0 |
SET.P (Set.P) | Текущее значение уставки работающего
регулятора | SL−L и SL−H | Значение уставки с учетом коррекции
по графику или заданной скорости ее изменения (VSP). Параметр доступен только по RS-485. | — |
r-S (r-S) | Запуск\остановка регулирования | rUn StOP | Регулятор работает Регулятор
остановлен | rUn |
At (At) | Запуск\остановка автонастройки | Не появляется при r-S = StOP rUn – запускается режим автонастройки. StOP –
автонастройка выключена. | StOP |
O (O) | Выходная мощность ПИД-регулятора | 0,0…100,0 | Только для прибора с ВУ1 аналогового типа [%] Параметр не настраивается. | — |
Группа init (init). Параметры входов прибора |
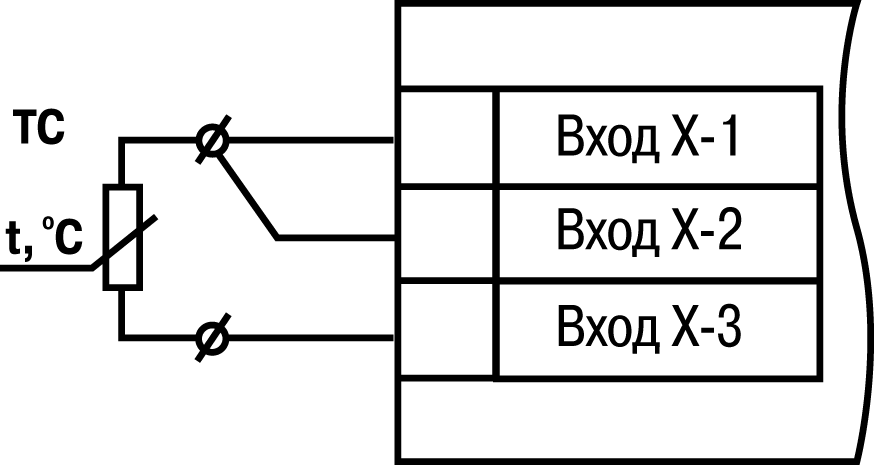
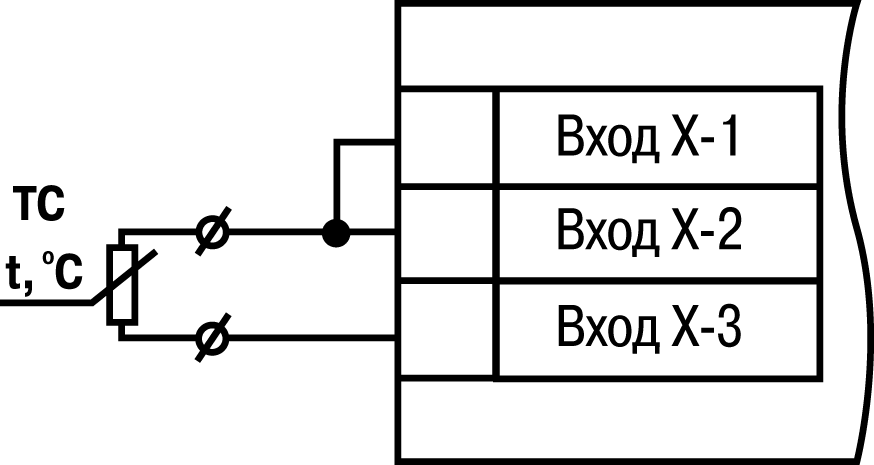
in.t1, in.t2 (in.t1, in.t2) | Тип входного датчика или сигнала для Входа 1, для Входа 2 | r385 | Pt
50 (α = 0,00385 °С -1) | E__L |
| r.385 | Pt 100 (α = 0,00385 °С -1) | |
| | r391 | 50П
(α = 0,00391 °С -1) | |
| | r.391 | 100П
(α = 0,00391 °С -1) | |
| | r-21 | 46П (α = 0,00428
°С -1) | |
| | r.426 | Cu 100 (α = 0,00426 °С -1) | |
| | r426 | Cu 50 (α = 0,00426 °С -1) | |
| | r-23 | 53М (α = 0,00426
°С -1) | |
| | r428 | 50М
(α = 0,00428 °С -1) | |
| | r.428 | 100М
(α = 0,00428 °С -1) | |
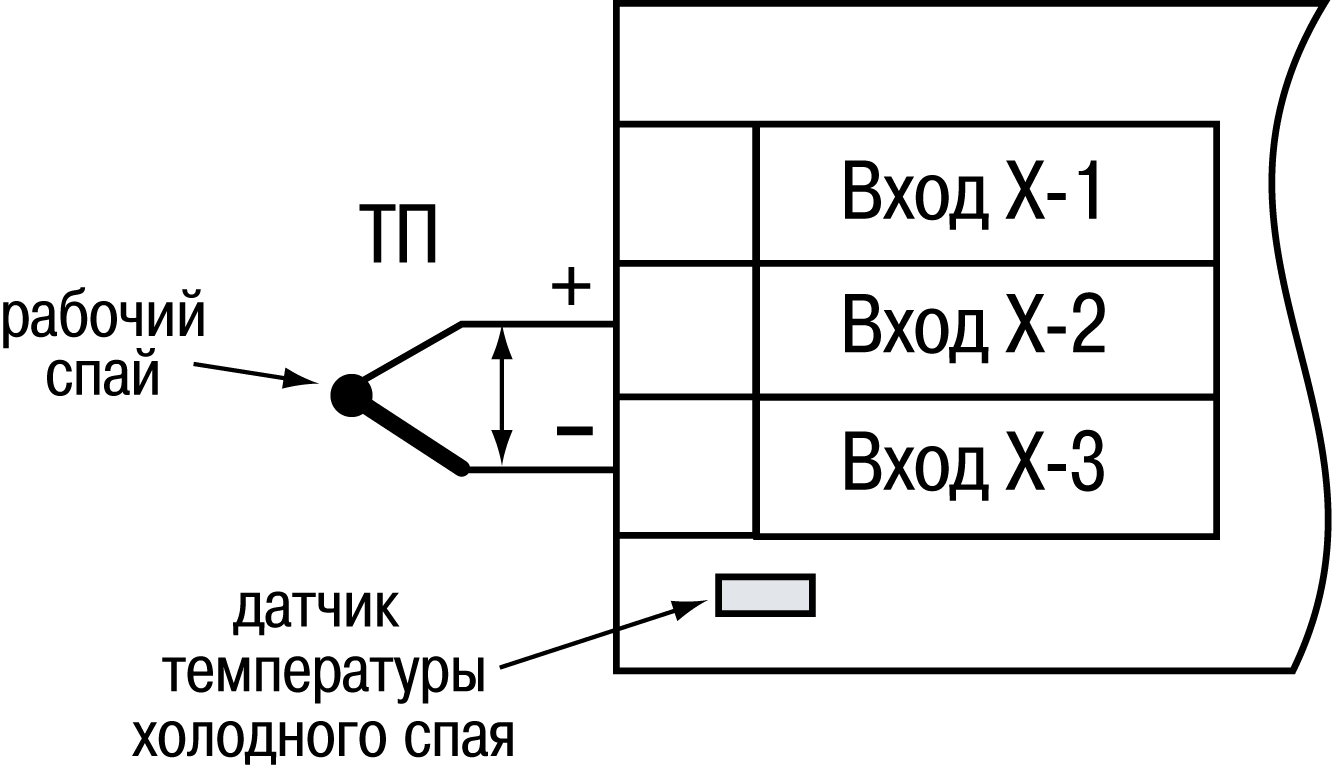
| | E_A1 | термопара ТВР (А-1) | |
| | E_A2 | термопара ТВР (А-2) | |
| | E_A3 | термопара ТВР (А-3) | |
| | E__b | термопара ТПР (В) | |
| | E__J | термопара ТЖК (J) | |
| | E__K | термопара ТХА (К) | |
| | E__L | термопара ТХК (L) | |
| | E__n | термопара ТНН (N) | |
| | E__r | термопара ТПП (R) | |
| | E__S | термопара ТПП (S) | |
| | E__t | термопара ТМК (Т) | |
| | i0_5 | сигнал тока 0...5 мА | |
| | i0.20 | сигнал тока 0...20 мА | |
| | i4.20 | сигнал тока 4...20 мА | |
| | U-50 | сигнал напряжения –50...+50 мВ | |
| | U0_1 | сигнал напряжения 0...1 В | |
DPT1, DPT2 (DPT1, DPT2) | Точность вывода температуры для Входа 1,
для Входа 2 | 0, 1 | Количество знаков после запятой при отображении значения температуры
на ЦИ для Входа 1, для Входа 2 | 1 |
dP1, dP2 (dP1, dP2) | Положение десятичной точки для Входа
1, для Входа 2 | 0, 1, 2, 3 | Количество знаков после запятой при отображении значения для аналогового
Входа 1, Входа 2 | 1 |
in.L1, in.L2 (in.L1, in.L2) | Нижняя граница диапазона измерения
для Входа 1*, для Входа 2** | –1999...9999 | Значение измеряемой физической величины, соответствующее нижнему
пределу выходного сигнала датчика | 0.0 |
in.H1, in.H2 (in.H1, in.H2) | Верхняя граница диапазона измерения
для Входа 1*, для Входа 2** | –1999...9999 | Значение измеряемой физической величины, соответствующее верхней
границе диапазона измерения датчика | 100.0 |
SQR1, SQR2 (SQR1, SQR2) | Вычислитель квадратного корня на Входе
1, на Входе 2 | OFF ON | Выключен Включен | OFF |
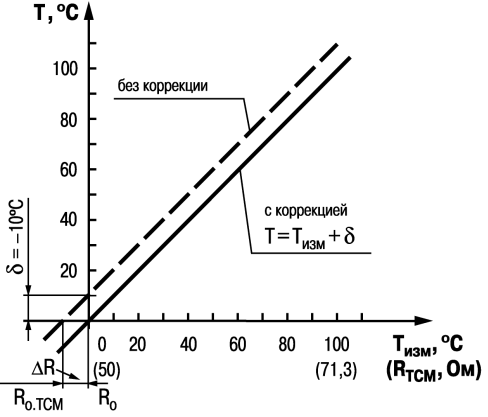
SH1, SH2 (SH1, SH2) | Сдвиг характеристики датчика для Входа
1*, для Входа 2** | –500...+500 | [ед. изм.] Прибавляется к измеренному значению | 0.0 |
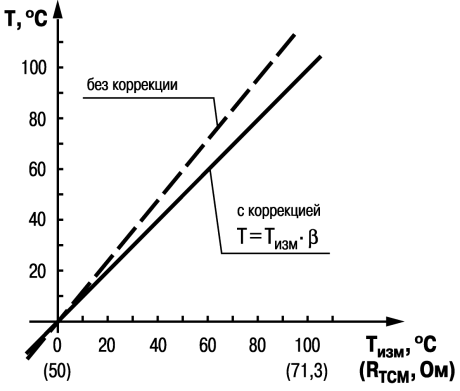
KU1, KU2 (KU1, KU2) | Наклон характеристики датчика для
Входа 1, для Входа 2 | 0,500...2,000 | Умножается на измеренное значение | 1.000 |
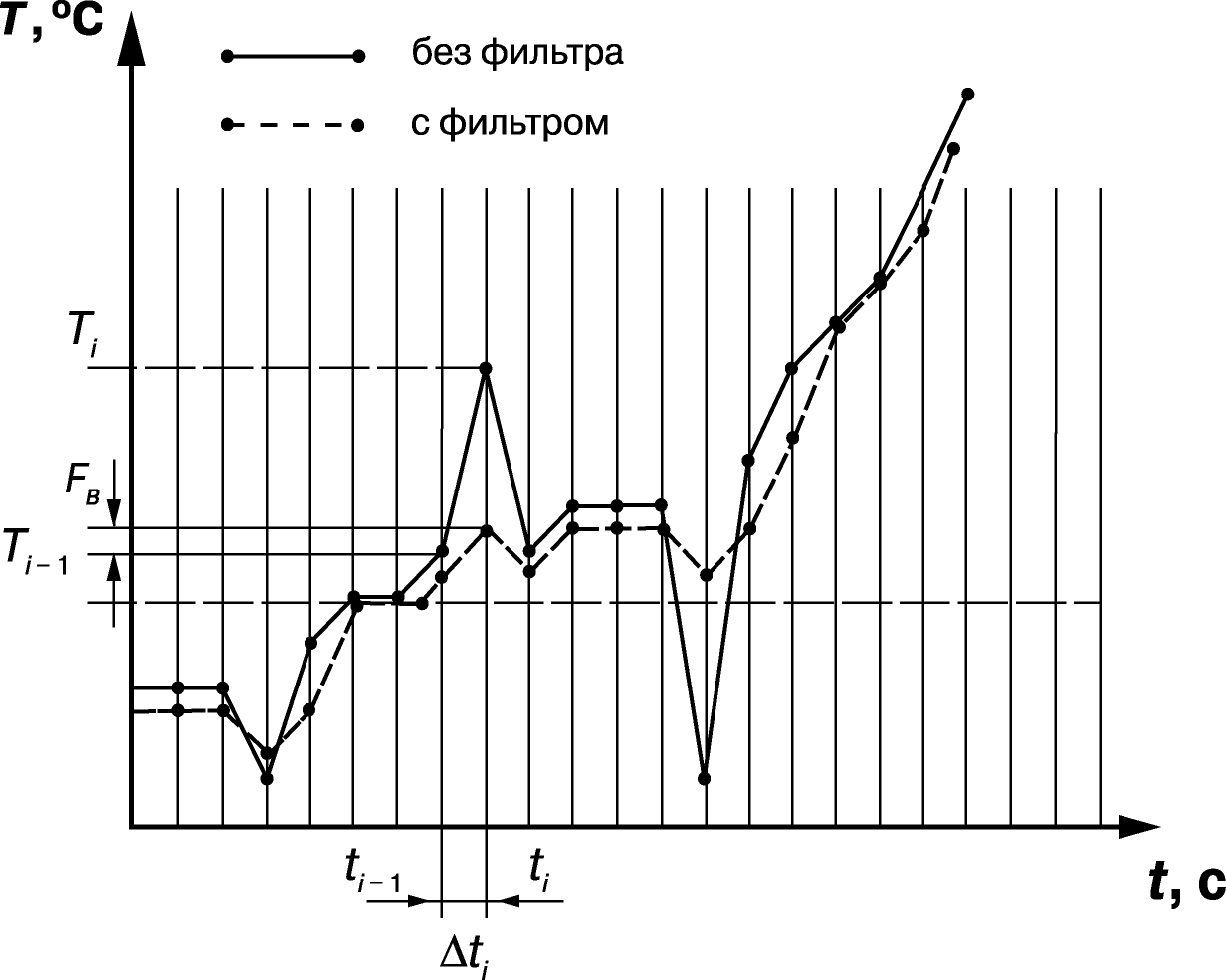
Fb1, Fb2 (Fb1, Fb2) | Полоса цифрового фильтра для Входа 1*,
для Входа 2** | 0...9999 | [ед. изм.] | 0.0 |
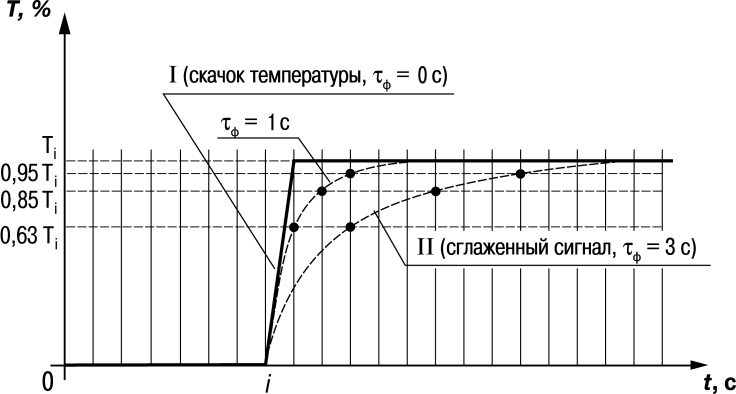
inF1, inF2 (inF1, inF1) | Постоянная времени цифрового фильтра
для Входа 1, для Входа 2 | 1...999 OFF | [c] Экспоненциальный фильтр
отключен | OFF |
Группа AdV (AdV). Параметры регулирования и «LBA» |
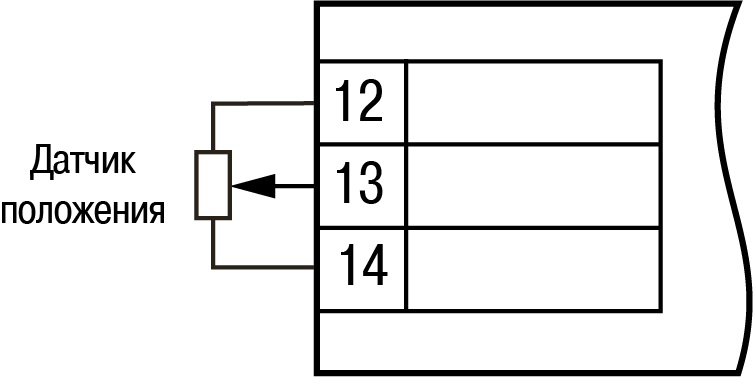
inP2 (inP2) | Функция на Входе 2 | Появляется при r-S = StOP OFF – датчик отключен; In.t2 – датчик, заданный в параметре in.t2; EVnt – ключ; V.Ptr – резистивный датчик положения; V.CS – токовый датчик положения | OFF |
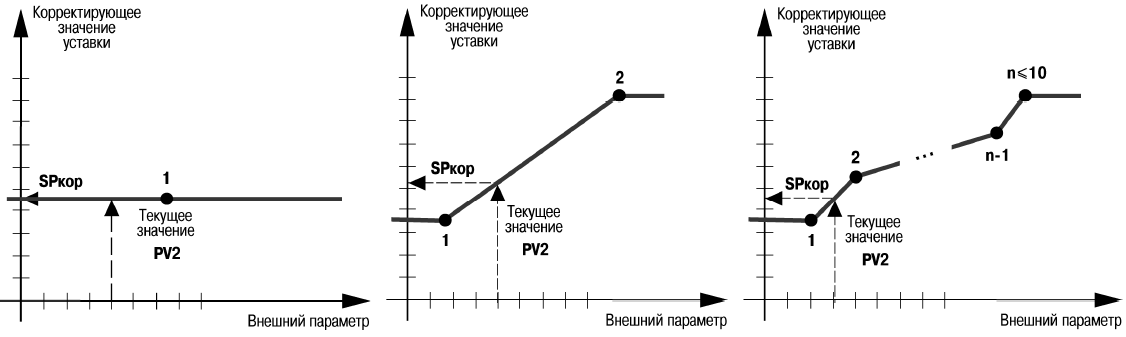
CALC (CALC) | Формула вычислителя | Появляется при inP2 = in.t2 A.SUM – средневзвешенная
сумма; rAt – отношение; SQPV – корень из средневзвешенной суммы; GrAF –
коррекция уставки | A.SUM |
KPV1, KPV2 (KPV1, KPV2) | Весовой коэффициент для PV1, для PV2 | –19,99…99,99 | Появляется при inP2 = in.t2, CALC ≠ GrAF. При CALC = rAt не устанавливать KPV2 = 0 | 1.00 |
SL-L (SL-L) | Нижняя граница диапазона задания уставки* | –1999…3000 | [ед. изм.] | –199,9 |
SL-H (SL-H) | Верхняя граница диапазона задания
уставки* | –1999…3000 | [ед. изм.] | 3000 |
MVEr (MVEr) | Выходной сигнал в состоянии «ошибка» | CLOS – задвижка
полностью закрыта; HOLd – задвижка удерживается
в прежнем состоянии; OPEn – задвижка полностью
открыта | CLOS |
0…100 | [%] Для аналоговой задвижки | 0 |
MdSt (MdSt) | Состояние выхода в состоянии «остановка
регулирования» | Появляется только для прибора с ВУ1 аналогового типа: MVSt – заданное параметром MVST; O – последнее значение выходного сигнала. | MVSt |
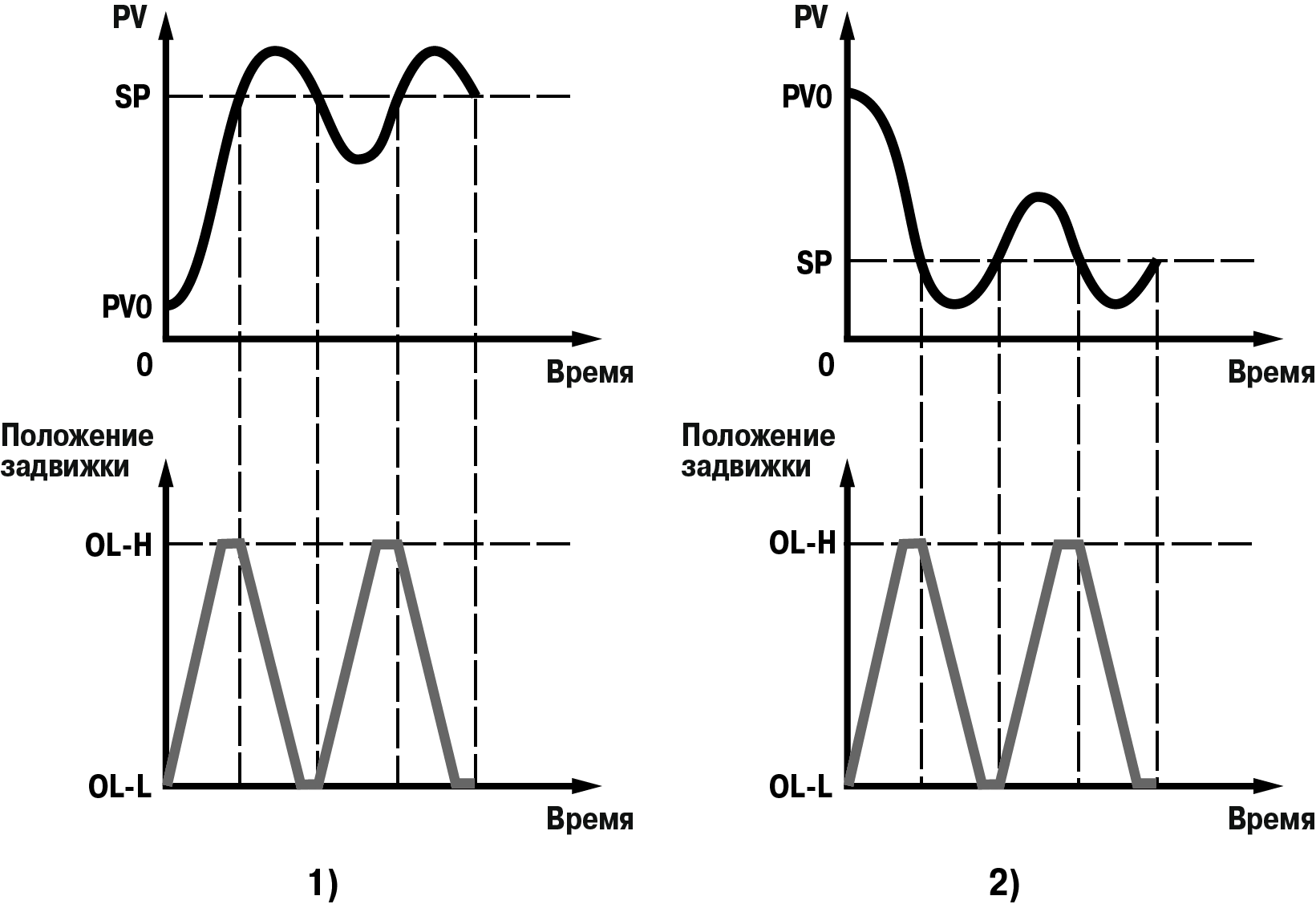
OREU (OREU) | Тип управления при регулировании | Or-r | «Обратное» управление. Применяется для управления ИМ типа «нагреватель» | Or-r |
Or-d | «Прямое» управление. Применяется для
управления ИМ типа «холодильник» |
PV0 (PV0) | Регулируемая величина при нулевой
выходной мощности | –100…2000 | [ед. изм.] | 20 |
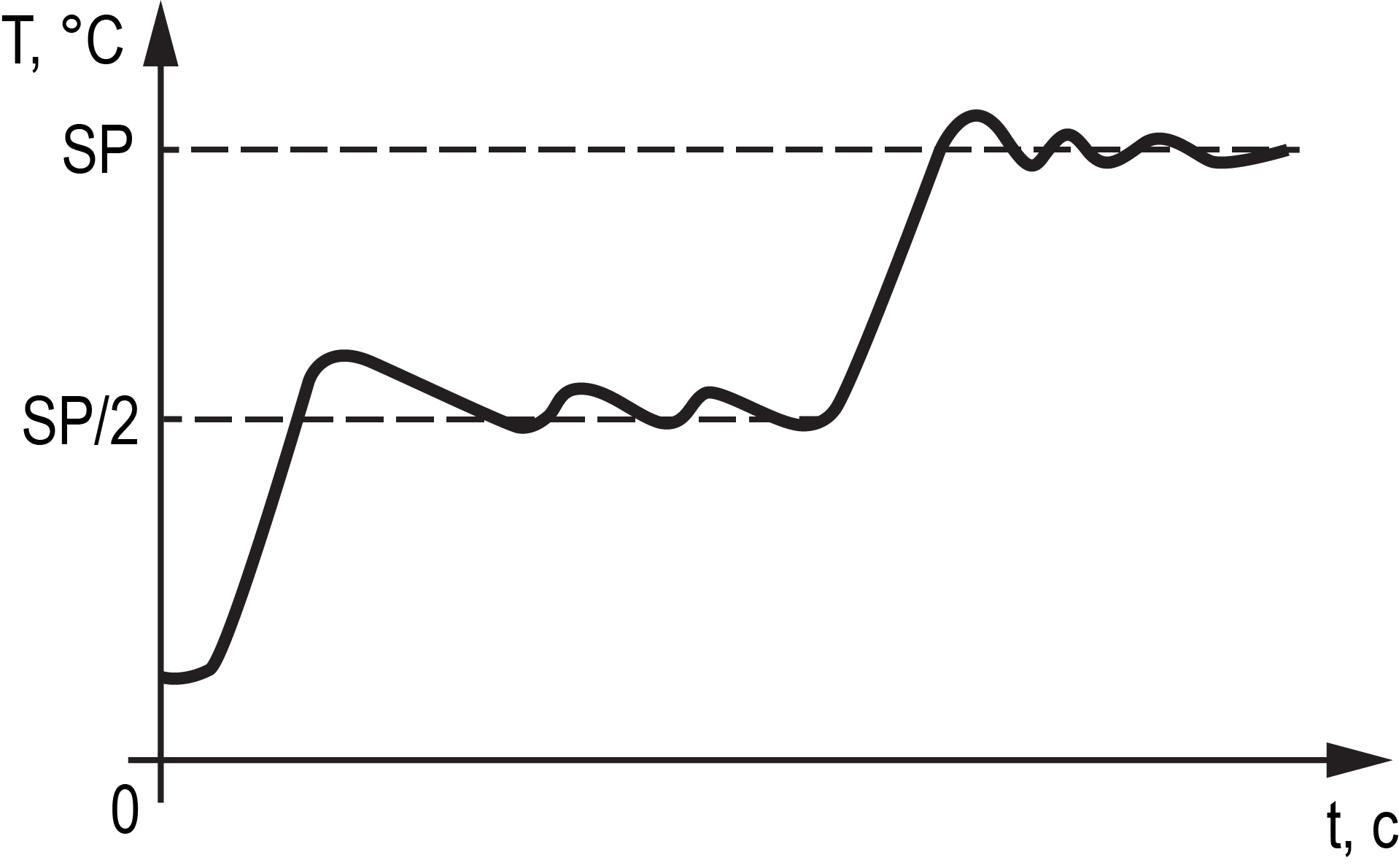
RAMP (RAMP) | Режим быстрого выхода на уставку | OFF ON | Выключен Включен | OFF |
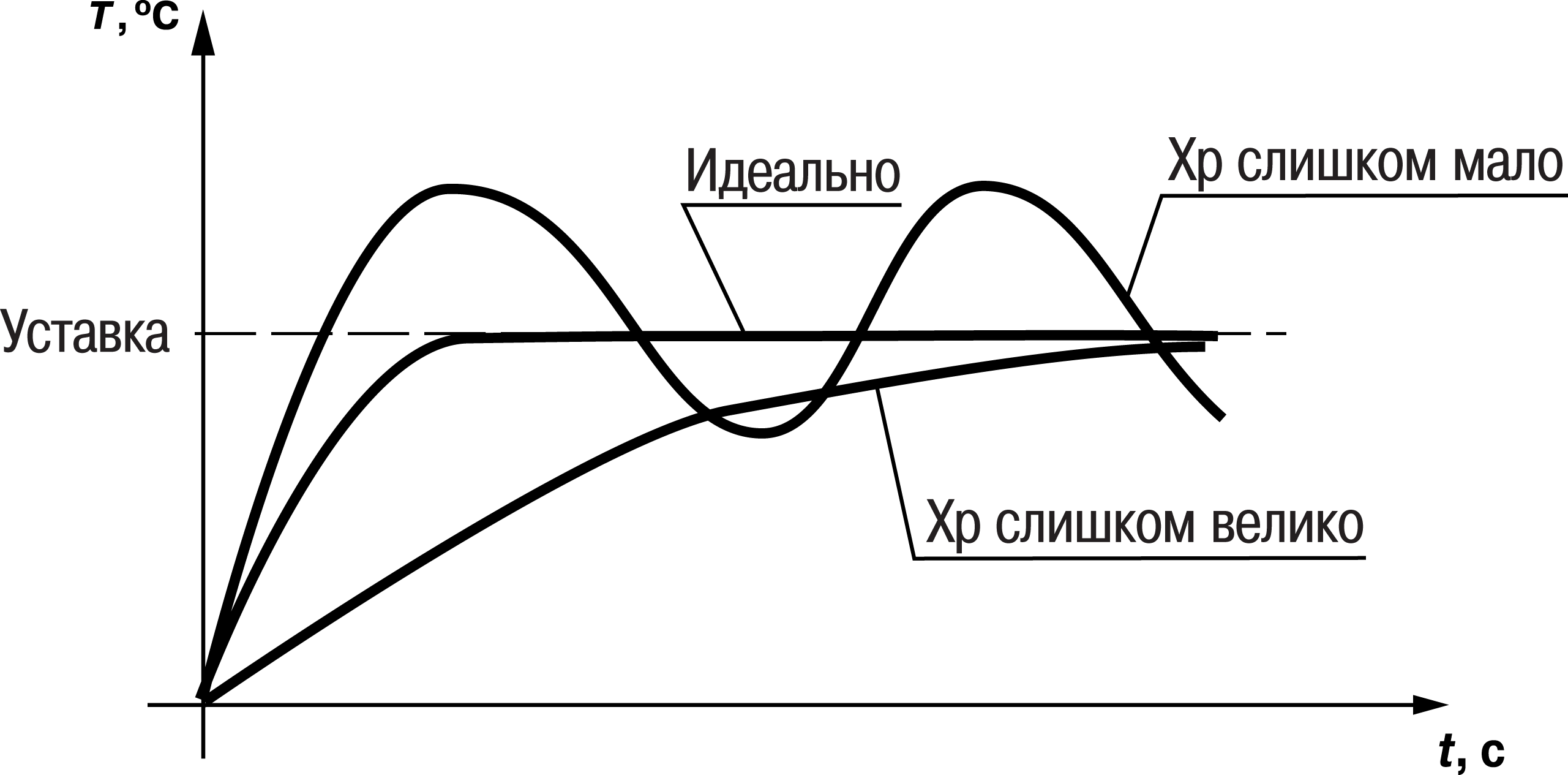
P (P) | Полоса пропорциональности ПИД-регулятора* | 0,001...9999 | [ед. изм.] | 30.0 |
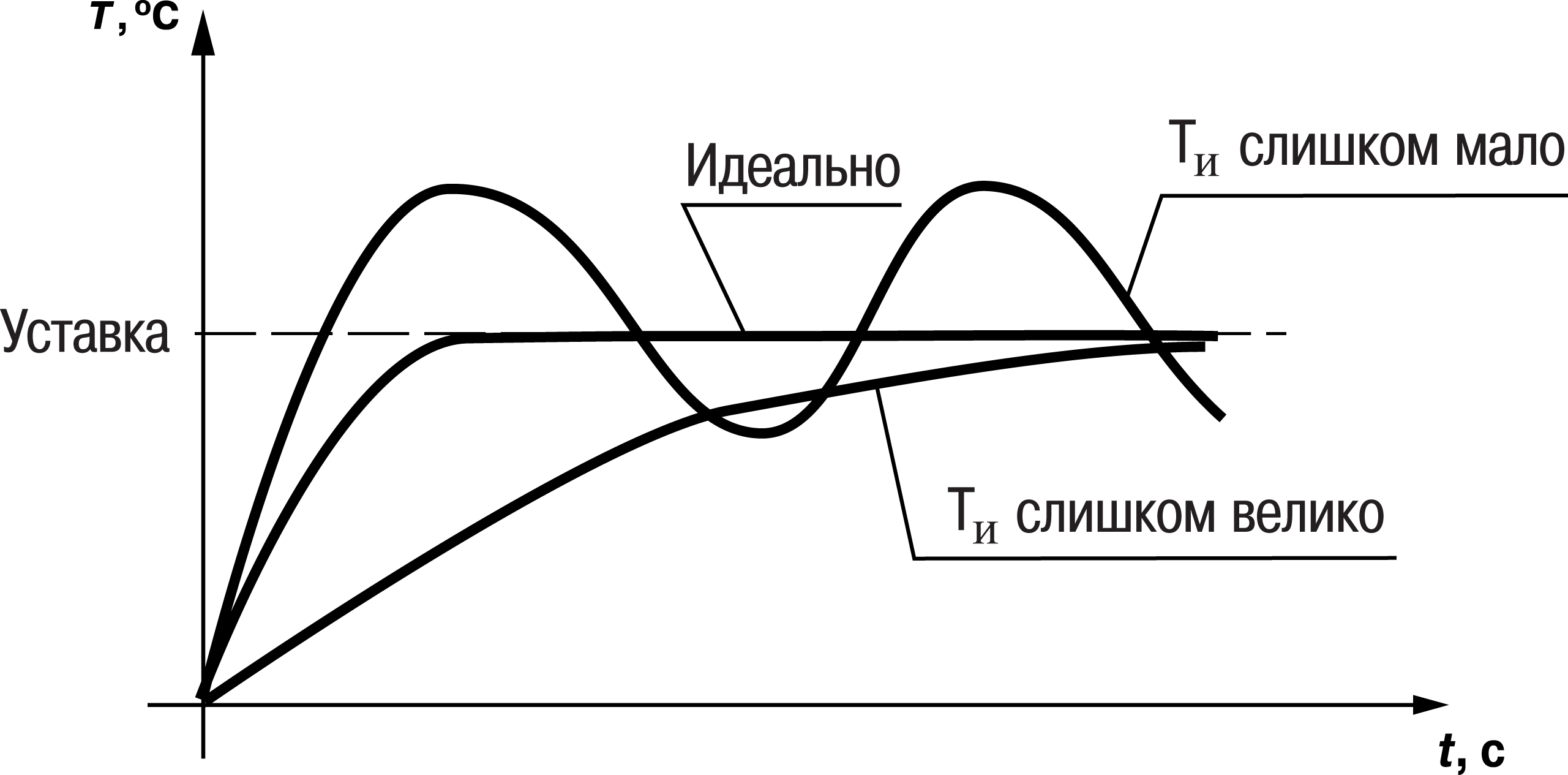
I (I) | Интегральная постоянная ПИД-регулятора | 0...3999 | [c] | 100 |
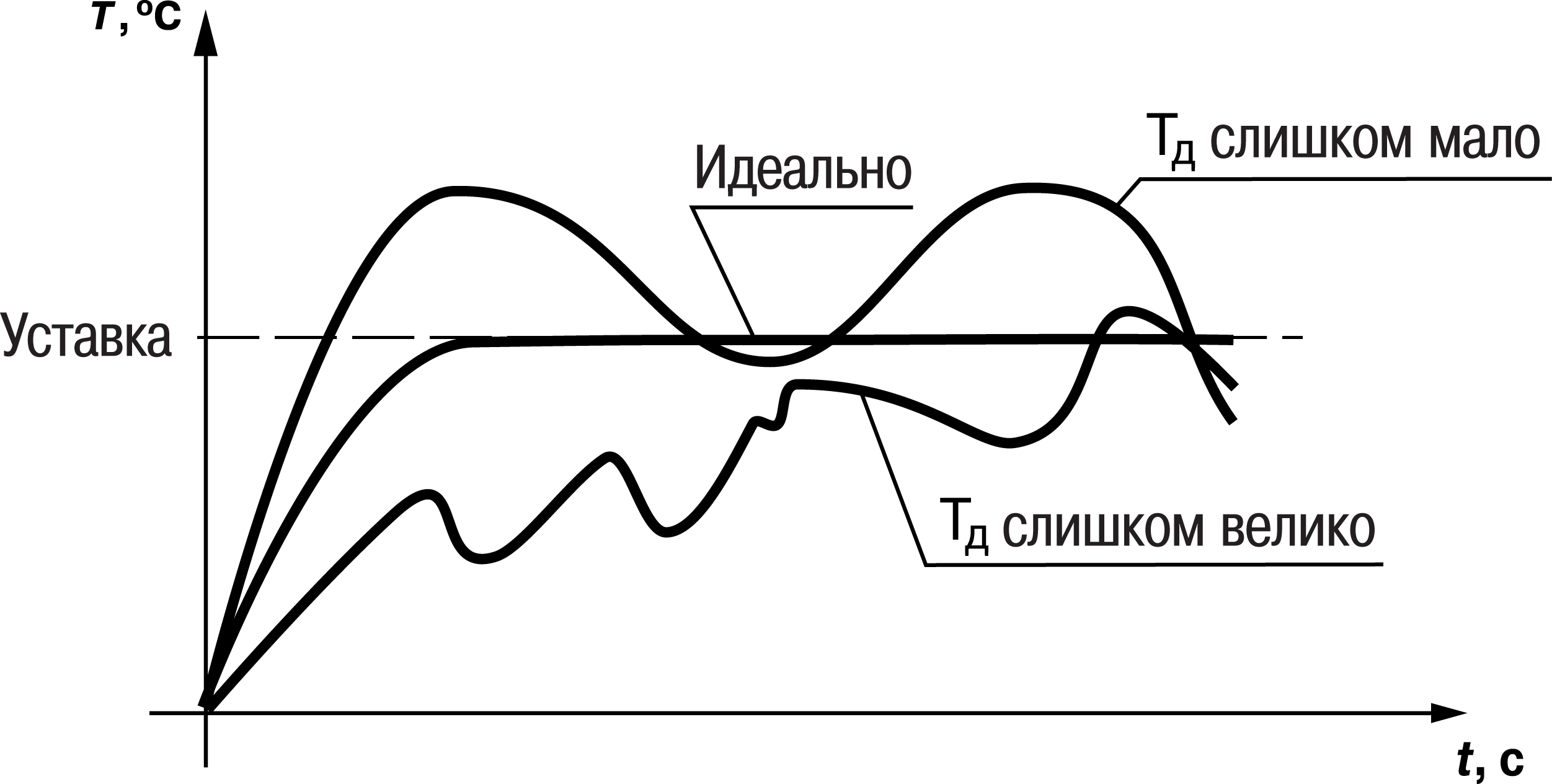
| D (D) | Дифференциальная постоянная ПИД-регулятора | 0...3999 | [c] | 20 |
Db (Db) | Параметр не используется, для корректной
работы должен быть установлен 0.0 | 0...200 | [ед. изм.] | 0.0 |
VSP (VSP) | Скорость изменения уставки* | 0...9999 | [ед.изм/мин] | 0.0 |
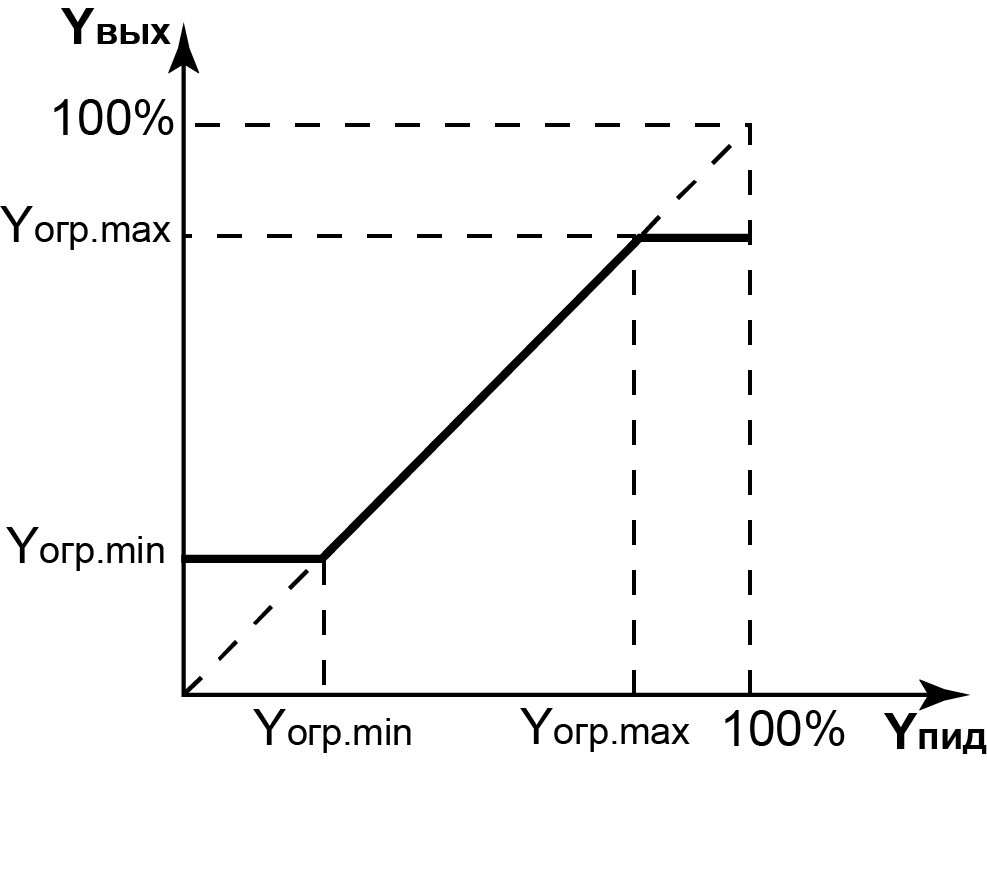
OL-L (OL-L) | Минимальная выходная мощность (нижний
предел) | от 0 до OL-H | [%] | 0 |
OL-H (OL-H) | Максимальная выходная мощность (верхний
предел) | от OL-L до 100 | [%] | 100 |
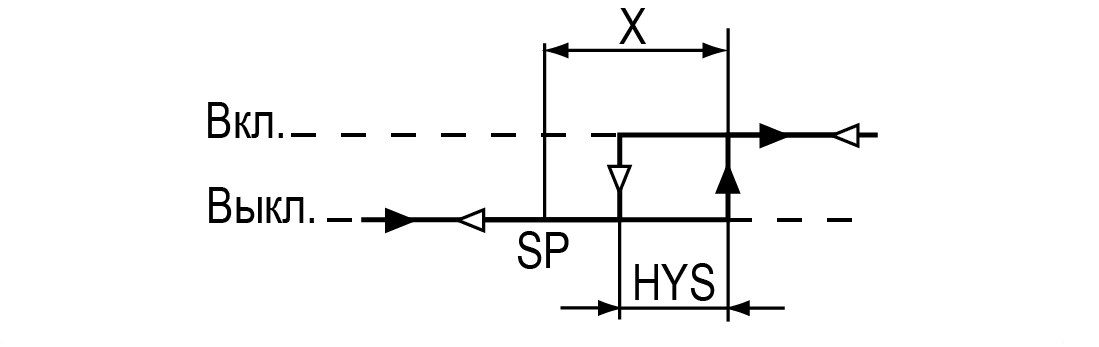
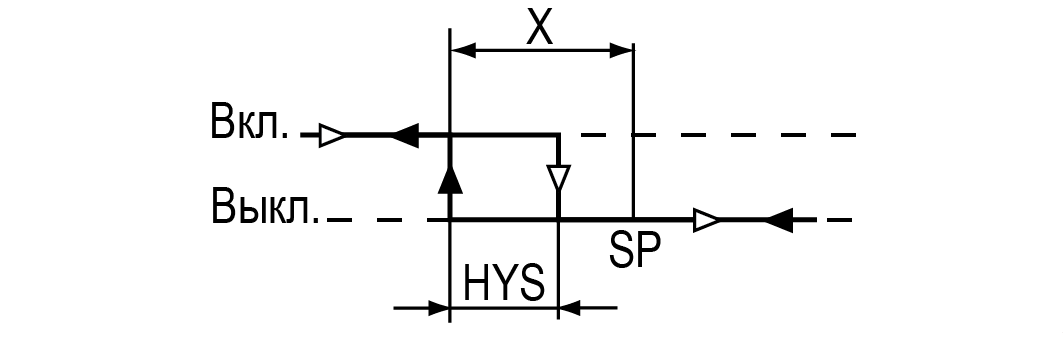
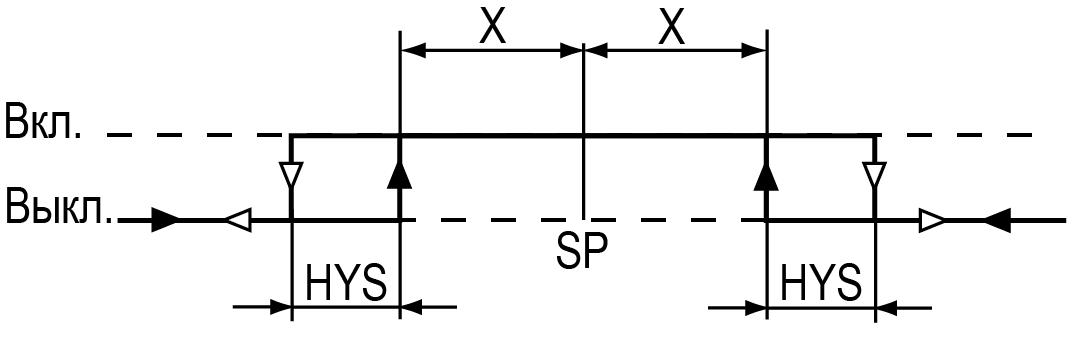
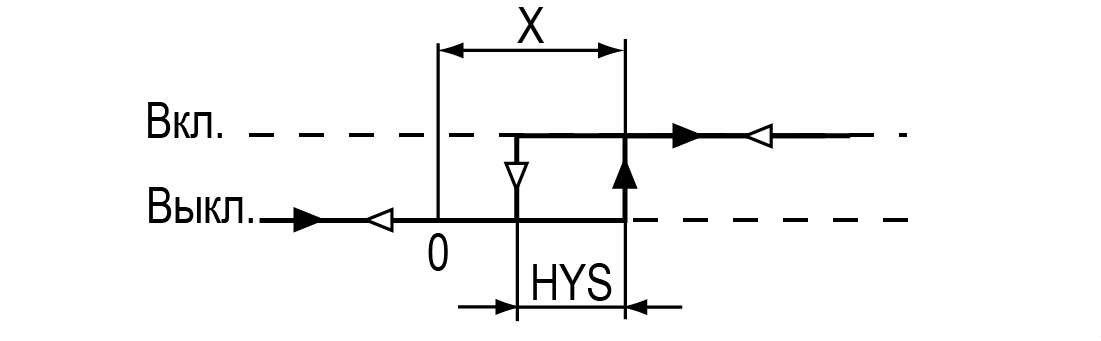
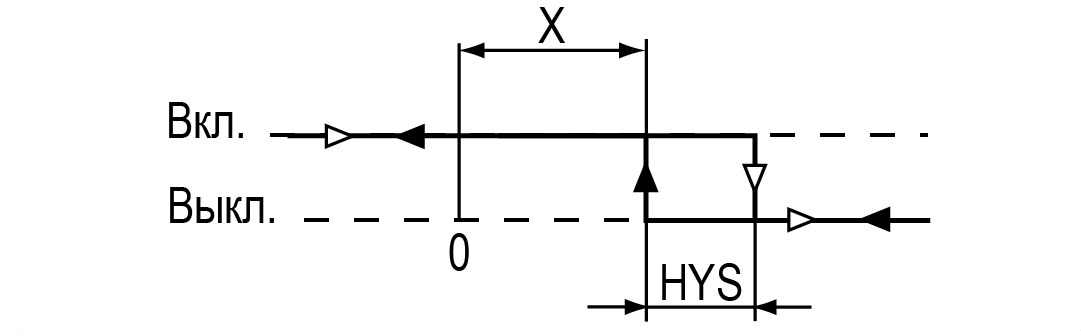
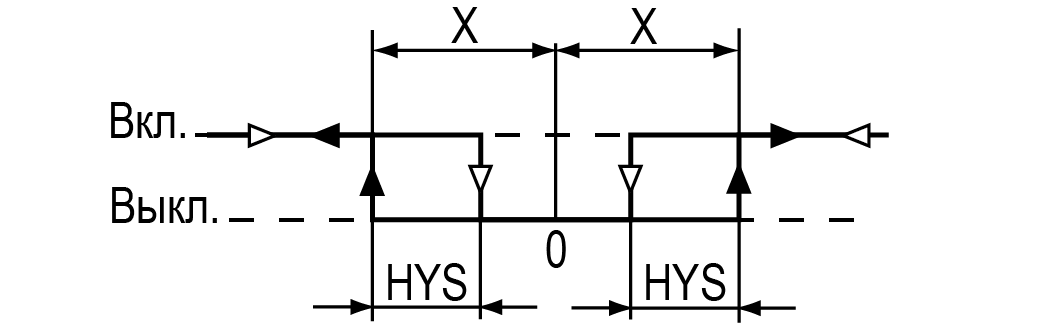
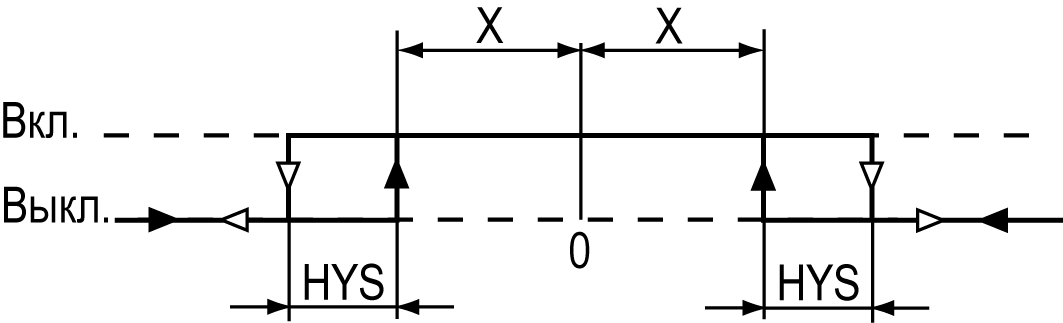
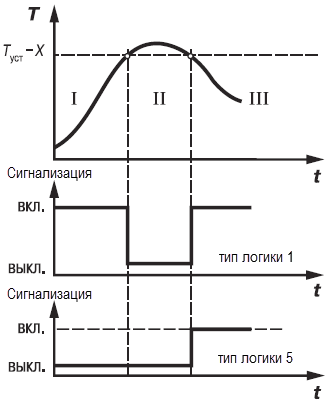
ALt (ALt) | Тип логики работы компаратора. Появляется только для прибора с ВУ1 аналогового типа. | 0 – сигнализация выключена; 1 – срабатывание при выходе за пределы заданного диапазона относительно SP; 2 – срабатывание по верхнему пределу относительно SP; 3 – срабатывание по нижнему пределу относительно SP; 4 – срабатывание в заданном диапазоне относительно SP; 5 – аналогично типу 1 с блокировкой первого включения; 6 – аналогично типу 2 с блокировкой первого включения; 7
– аналогично типу 3 с блокировкой первого включения; 8 – срабатывание
по верхнему пределу относительно 0; 9 – срабатывание по нижнему
пределу относительно 0; 10 – аналогично типу 8 с блокировкой
первого включения; 11 – аналогично типу 9 с блокировкой первого
включения; 12 – срабатывание при выходе за пределы заданного
диапазона относительно 0; 13 – срабатывание в заданном диапазоне
относительно 0; 14 – аналогично типу 12 с блокировкой первого
включения | 0 |
MVSt (MVSt) | Выходной сигнал в состоянии «остановка
регулирования» | Аналогично параметру MVEr | — |
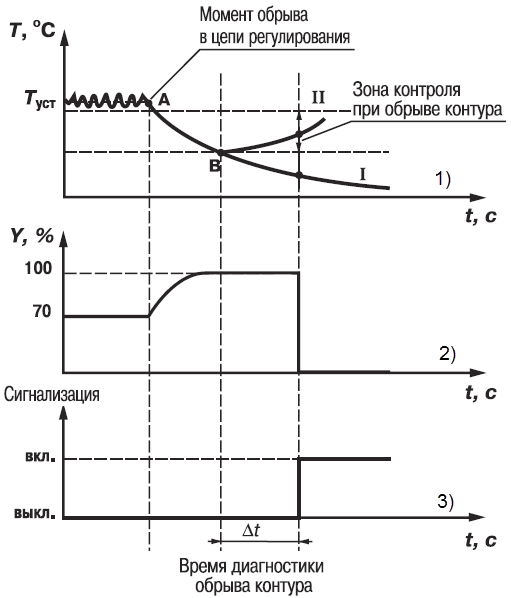
LbA (LbA) | Время диагностики обрыва контура | 0…9999 0 | [с] Функция определения обрыва контура не работает | 0 |
LbAb (LbAb) | Ширина зоны диагностики обрыва контура* | 0…9999 | [ед. изм.] | 10.0 |
AL-d (AL-d) | Порог срабатывания компаратора* | –1999…3000 | [ед. изм.] | 10.0 |
AL-H (AL-H) | Гистерезис компаратора* | 0…3000 | [ед. изм.] | 0.0 |
Группа VALV (VALV). Параметры задвижки |
V.MOt (V.MOt) | Полное время хода задвижки | 5…999 | [c] | 30 |
V.db (V.db) | Зона нечувствительности задвижки | 0…9999 0…100 | [мс] [%] Для аналоговой задвижки | 0 |
V.GAP (V.GAP) | Время выборки люфта задвижки | 0,0…10,0 | [с] | 0.0 |
V.rEV (V.rEV) | Минимальное время реверса | 0,0…10,0 | [с] | 0.0 |
V.toF (V.toF) | Пауза между импульсами доводки | 0…9 OFF | [с] доводчик отключен | 2 |
Группа DISP (DISP). Параметры индикации |
diS1 (diS1) | Режим индикации 1 | OFF On | Выключен Включен: – на верхнем ЦИ – PV1; – на нижнем ЦИ – SP | On |
diS2 (diS2) | Режим индикации 2 | OFF On | Выключен Включен: – на верхнем ЦИ – PV1; – на нижнем ЦИ – PV2 | OFF |
diS3 (diS3) | Режим индикации 3 | OFF On | Выключен Включен: – на верхнем ЦИ – LUPV; – на нижнем ЦИ – SP | OFF |
diS4 (diS4) | Режим индикации 4 | OFF On | Выключен Включен: – на
верхнем ЦИ – PV1; – на нижнем ЦИ – O | OFF |
diS5 (diS5) | Режим индикации 5 | OFF On | Выключен Включен: – на верхнем ЦИ – LUPV; – на нижнем ЦИ – O | OFF |
rEt (rEt) | Время выхода из режима настройки | 5…99 – [c] время, по истечении которого прибор возвращается к индикации
первого параметра группы LVOP. | OFF |
OFF – автоматического возврата к индикации не происходит |
Группа GrAF (GrAF). Параметры графика коррекции
уставки (появляется при CALC = GrAF) |
nOdE (nOdE) | Количество узловых точек графика | 1…10 | | 1 |
X (X) | Значение внешнего параметра в точке i* | –1999…3000 | [ед. изм.] | 0.0 |
Y (Y) | Корректирующее значение уставки в точке i* | [ед. изм.] | 0.0 |
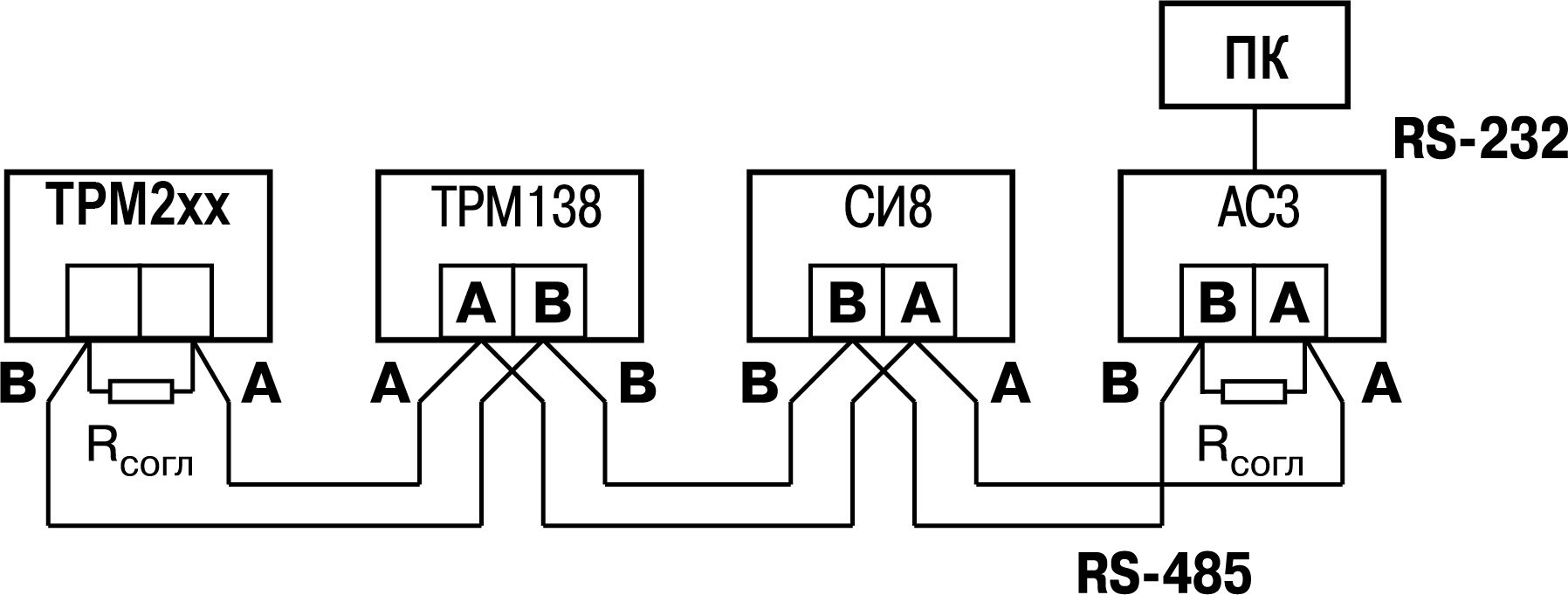
Группа COMM (COMM) Параметры обмена данными по интерфейсу |
PROT (PROT) | Протокол обмена данными | OWEN M.RTU M.ASC | OWEN Modbus RTU Modbus ASCII | OWEN |
bPS (bPS) | Скорость обмена в сети | 2,4; 4,8; 9,6; 14,4;19,2; 28,8; 38,4;
57,6; 115,2 | [кбит/с] | 115.2 |
A.LEN (A.LEN) | Длина сетевого адреса | 8, 11 | [бит] | 8b |
Addr (Addr) | Базовый адрес прибора в сети | 0…2047 | Запрещается устанавливать одинаковые номера нескольким приборам в
одной шине | 0 |
rSdL (rSdL) | Задержка ответа от прибора по RS-485 | 0…45 | [мс] | 20 |
Группа SECr (SECr). Параметры секретности (вход
по коду PASS = 100) |
OAPt (OAPt) | Защита параметров от просмотра*** | 0 – Разрешен доступ ко всем параметрам; 1 – Разрешен доступ только к параметрам группы LVOP; 2 – Разрешен доступ только к SP | 0 |
WtPt (WtPt) | Защита параметров от изменения*** | 0 – Разрешено изменение всех параметров; 1 – Запрещено изменение всех параметров, кроме параметров группы LVOP; 2 – Запрещено изменение всех параметров, кроме R-S и SP; 3 – Запрещено изменение
всех параметров, кроме уставки SP; 4 – Запрещено
изменение всех параметров | 0 |
EdPt (EdPt) | Защита отдельных параметров от просмотра
и изменения | OFF On | Выключена Включена | OFF |
 Примечание Примечание* Параметры отображаются с десятичной точкой, положение которой
определяется параметром DP1. ** Параметры отображаются
с десятичной точкой, положение которой определяется параметром DP2. *** По интерфейсу RS-485 возможно изменение значения
всех параметров при любых значениях OAPt, WtPt. |