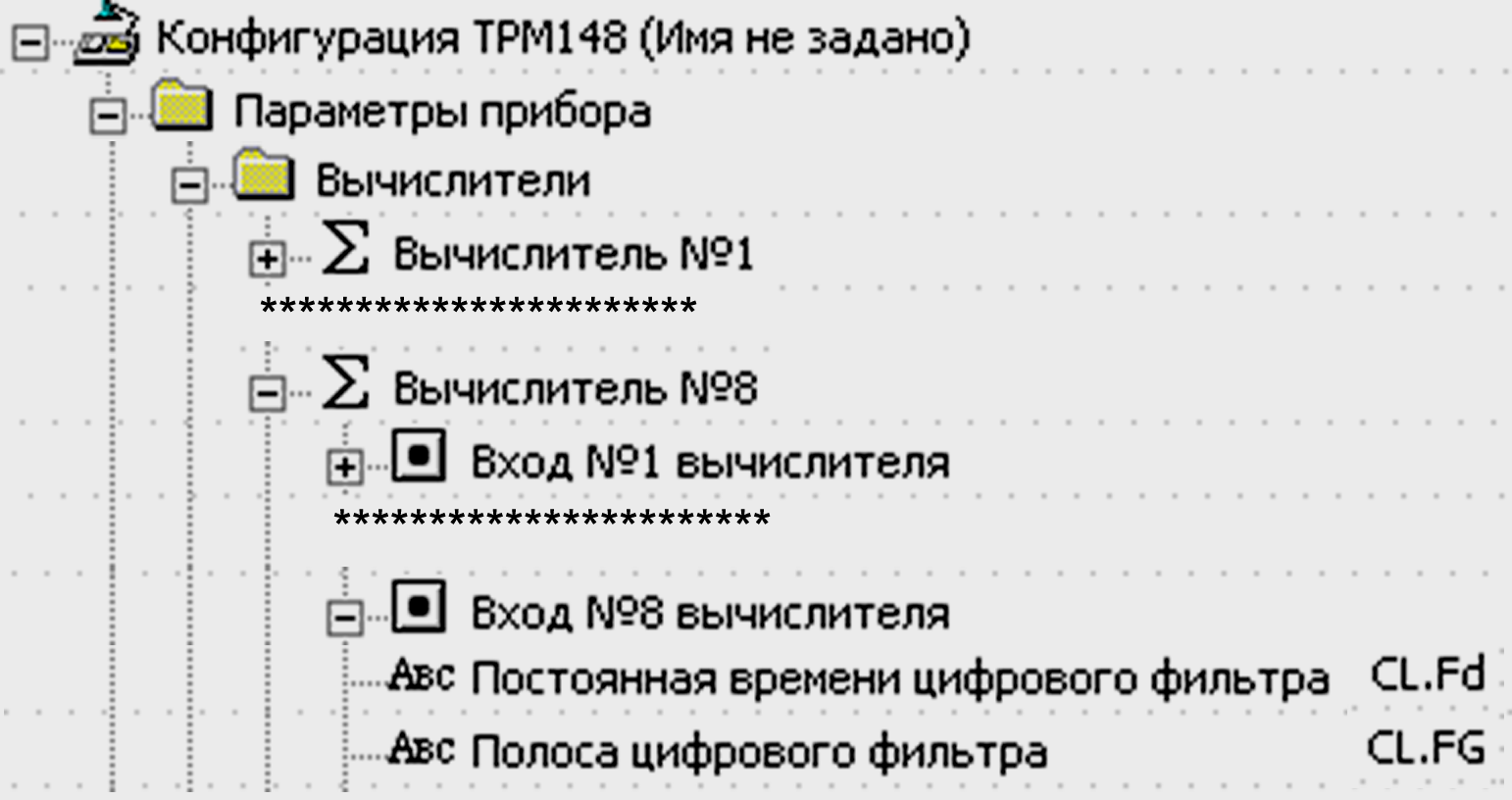
Настройка цифровой фильтрации измерений
Для ослабления влияния внешних импульсных помех на эксплуатационные характеристики прибора предусмотрена цифровая фильтрация измерений.
Фильтрация осуществляется независимо для каждого Входа и проводится в два этапа.
На первом этапе фильтрации из текущих измерений входных параметров отфильтровываются значения, имеющие явно выраженные «провалы» или «выбросы».
Для этого прибор вычисляет разность между результатами измерений входной величины, выполненных в двух последних циклах опроса, и сравнивает ее с заданным значением, называемым Полосой фильтра. Если вычисленная разность превышает заданный предел, то производится повторное измерение, полученный результат отбрасывается, а значение полосы фильтра удваивается. В случае подтверждения нового значения фильтр перестраивается (т. е. полоса фильтра уменьшается до исходной) на новое стабильное состояние измеряемой величины. Такой алгоритм позволяет защитить прибор от воздействия единичных импульсных и коммутационных помех, возникающих на производстве при работе силового оборудования.
Полоса фильтра задается в единицах измеряемой величины параметром in.FG для каждого Входа.
Малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. На практике при задании «полосы фильтра» следует руководствоваться максимальной скоростью изменения контролируемой величины и длительностью цикла опроса датчика.
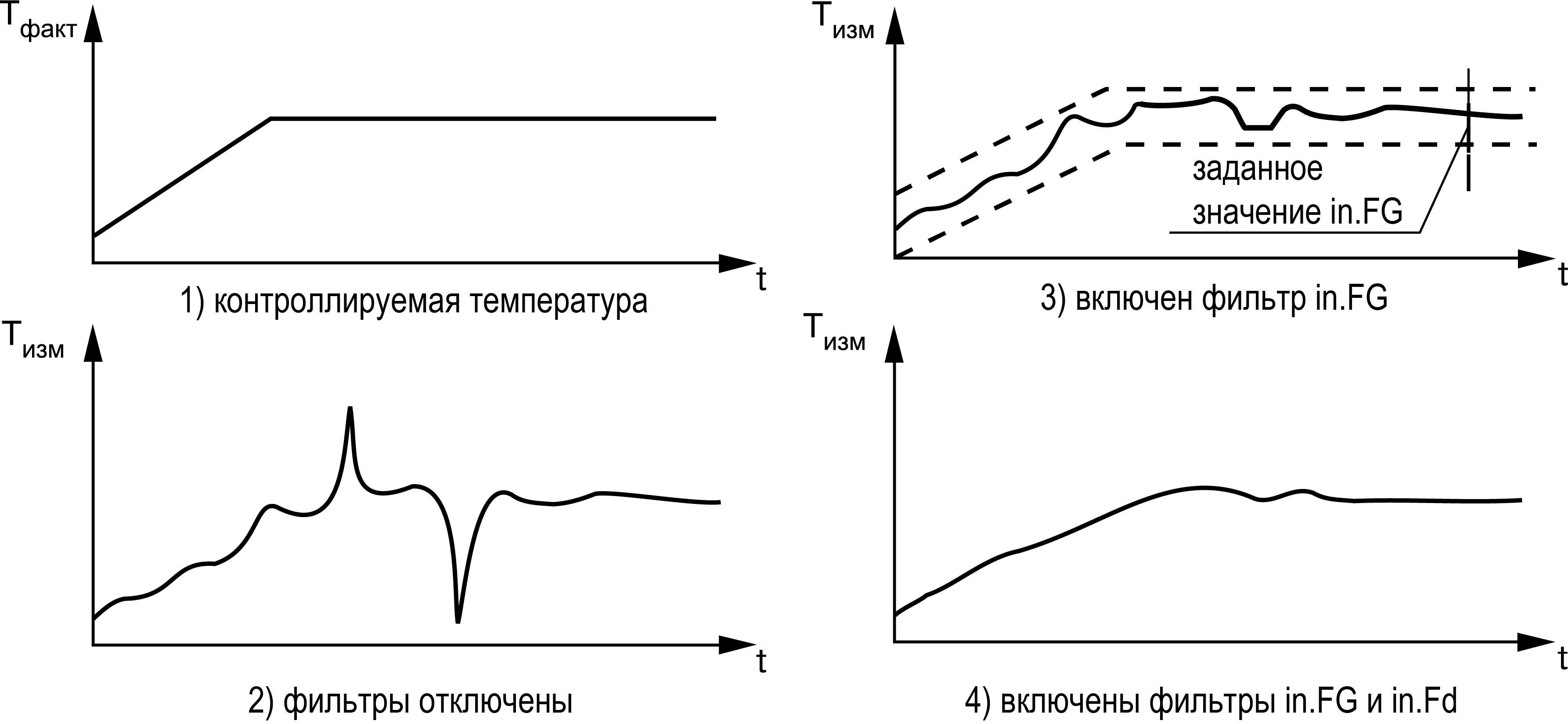
При необходимости данный фильтр отключается установкой нулевого значения параметра in.FG.
На втором этапе цифровые фильтры сглаживают результаты измерений при их колебаниях (демпфирование).
Основной характеристикой сглаживающего фильтра является Постоянная времени фильтра – интервал, в течение которого изменение выходного сигнала фильтра достигает 0,63 от изменения входного сигнала.
Постоянная времени фильтра задается в секундах параметром in.Fd для каждого Входа.
Увеличение постоянной времени фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины.
При необходимости данный фильтр отключается установкой in.Fd = 0.
Временные диаграммы работы цифровых фильтров представлены на рисунке
Коррекция измерительной характеристики датчиков
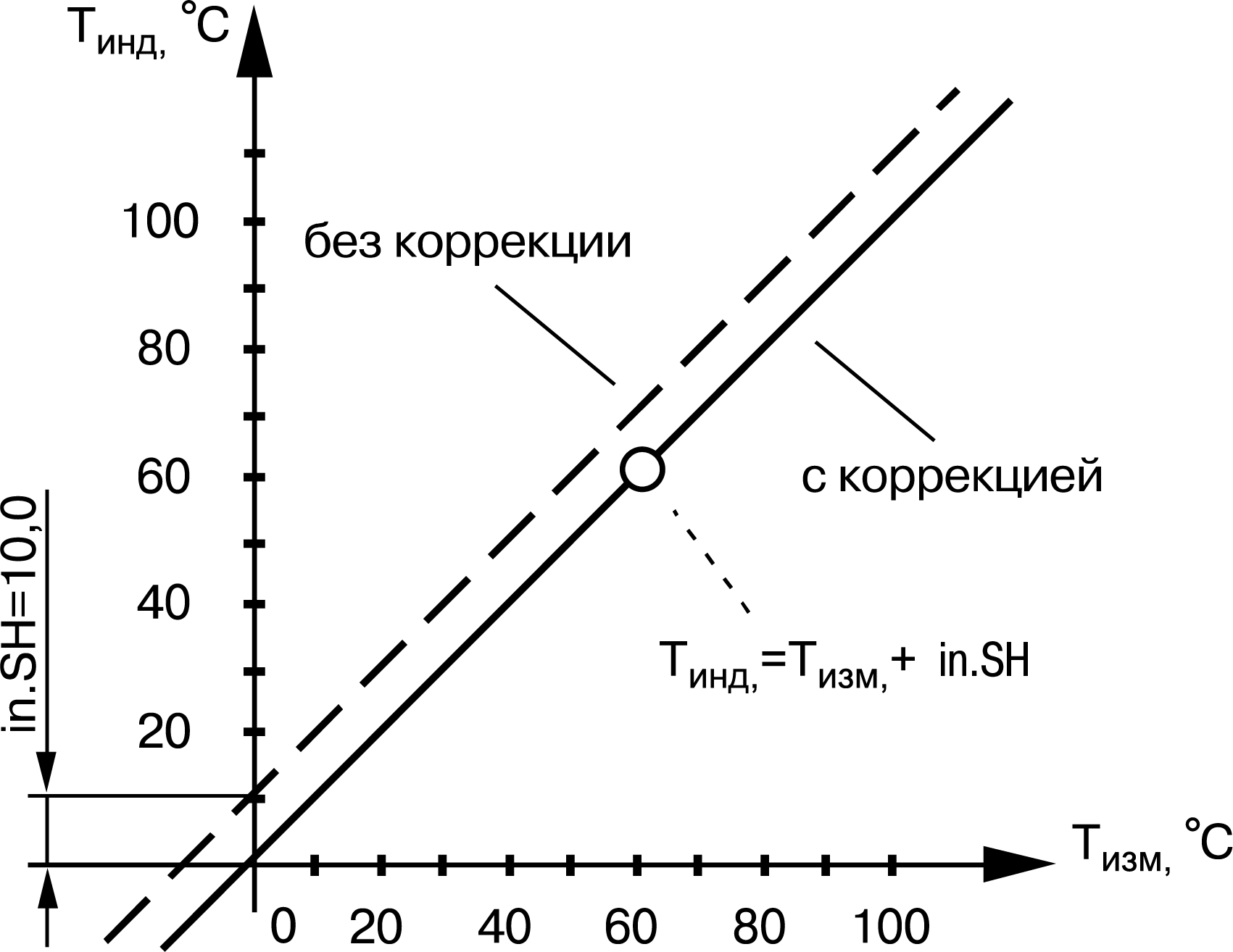
Для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами, измеренные и отфильтрованные прибором значения могут быть откорректированы. В приборе есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
Сдвиг характеристики осуществляется путем прибавления к измеренной величине значения, заданного параметром in.SH для данного Входа. Значение Сдвига характеристики датчика задается в единицах измерения физической величины и служит для устранения влияния начальной погрешности первичного преобразователя (например, значения R0 у термометров сопротивления).
Примеры сдвига измерительной характеристики представлены на рисунке ниже.
Наклон характеристики изменяется умножением измеренной величины на поправочный коэффициент β, значение которого задается для каждого Датчика параметром in.SL. Данный вид коррекции используется для компенсации погрешностей самих датчиков (например, при отклонении у ТС параметра α от стандартного значения) или погрешностей, связанных с разбросом сопротивлений шунтирующих резисторов (при работе с преобразователями, выходным сигналом которых является ток).
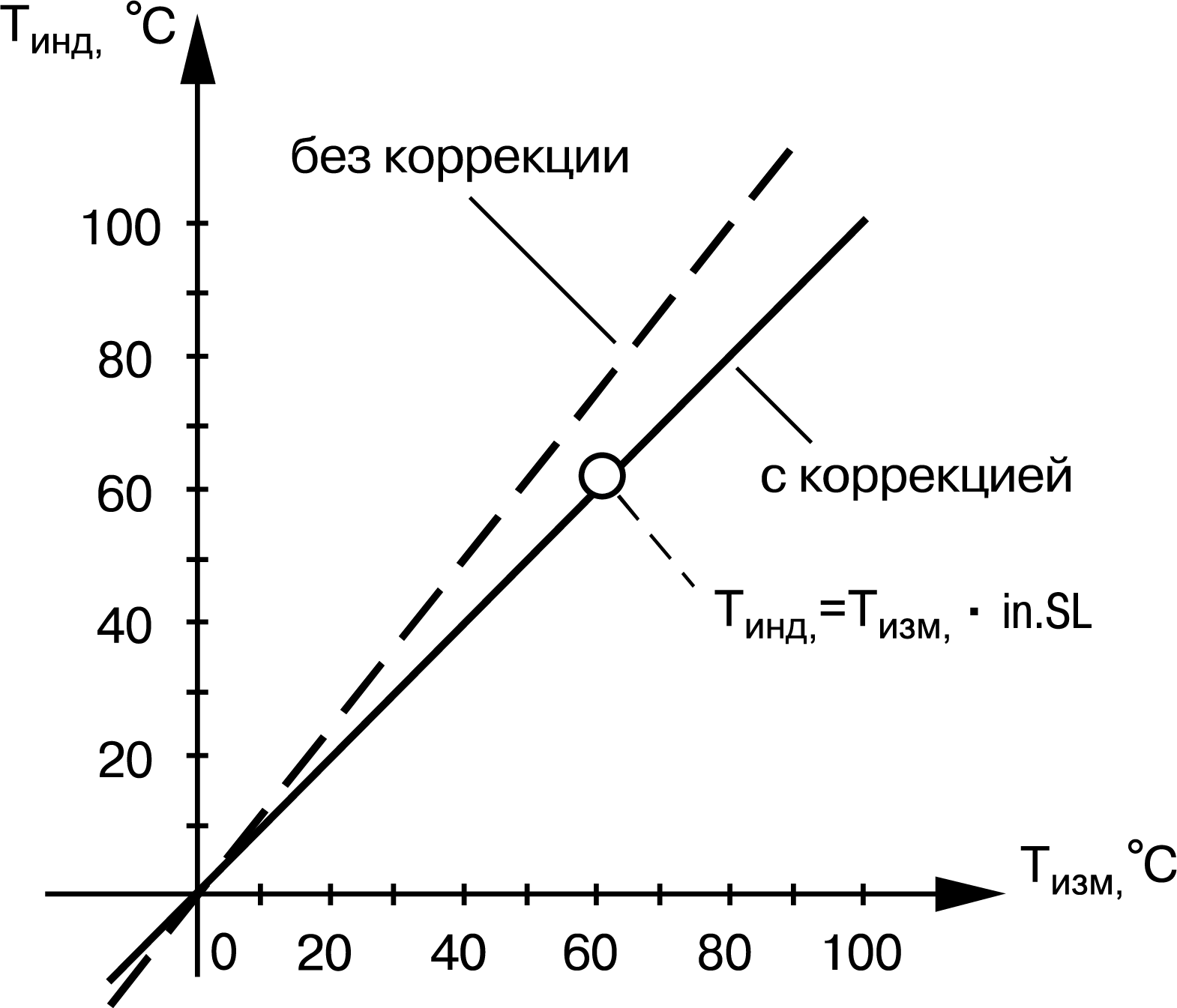
Значение поправочного коэффициента β задается в безразмерных единицах в диапазоне 0,900…1,100 и перед установкой определяется по формуле:

где β – значение поправочного коэффициента, устанавливаемого параметром in.SL;
Пфакт – значение величины без влияния погрешностей;
Пизм – измеренное прибором значение той же величины.
Пример изменения наклона измерительной характеристики представлен на рисунке выше.
Необходимость изменения заводской установки поправочного коэффициента рекомендуется определять при максимальных (или близких к ним) значениях входного параметра, где отклонение измерительной характеристики наиболее заметно.
Объект и канал регулирования
В настоящем Руководстве следует различать понятия:
объект физический – устройство или установка, осуществляющая технологический процесс, который характеризуется набором регулируемых параметров.
объект логический (Объект) – совокупность программных модулей, предназначенных для управления одним физическим объектом.
Физическим объектом может являться:
печь, в которой поддерживается температура;
теплица, в которой поддерживается влажность и температура;
емкость, в которой поддерживается уровень и давление
и т. п.
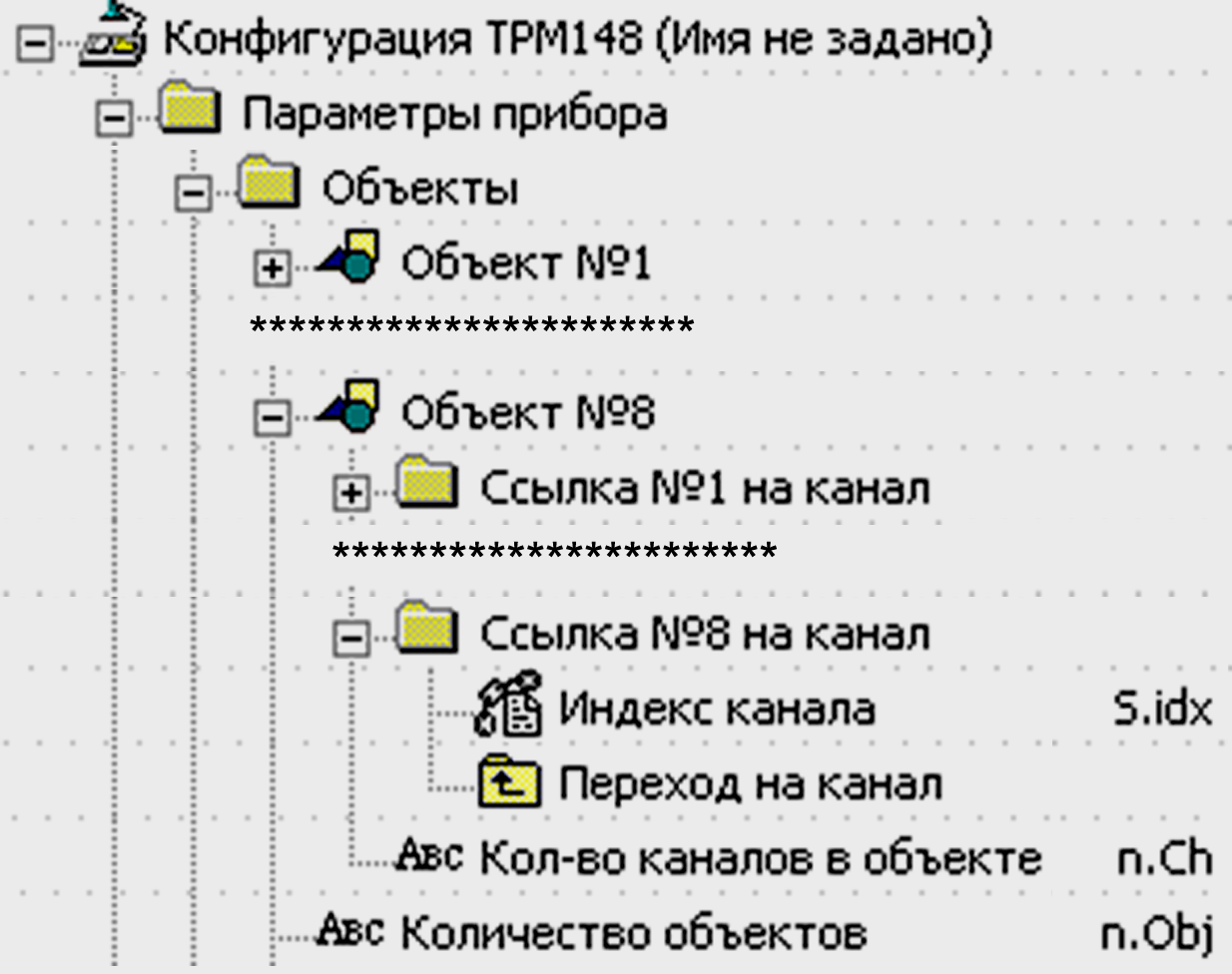
В ТРМ148 может быть до восьми независимых логических объектов для управления восемью физическими объектами.
Количество Объектов задается параметром n.obj.
В состав Объекта входит Канал – комплекс элементов прибора, предназначенный для регулирования и/или мониторинга одной физической величины (температуры, давления и др.), вычисляемой (контролируемой) по результатам измерения одним или несколькими датчиками.
Объект может включать один или несколько Каналов. Количество Каналов в Объекте равно количеству регулируемых и/или контролируемых физических величин Объекта.
Количество Каналов в Объекте задается параметром n.Ch.
Общее количество Каналов для всех Объектов не должно превышать 8.
Структурная схема одного канала приведена на рисунке ниже.
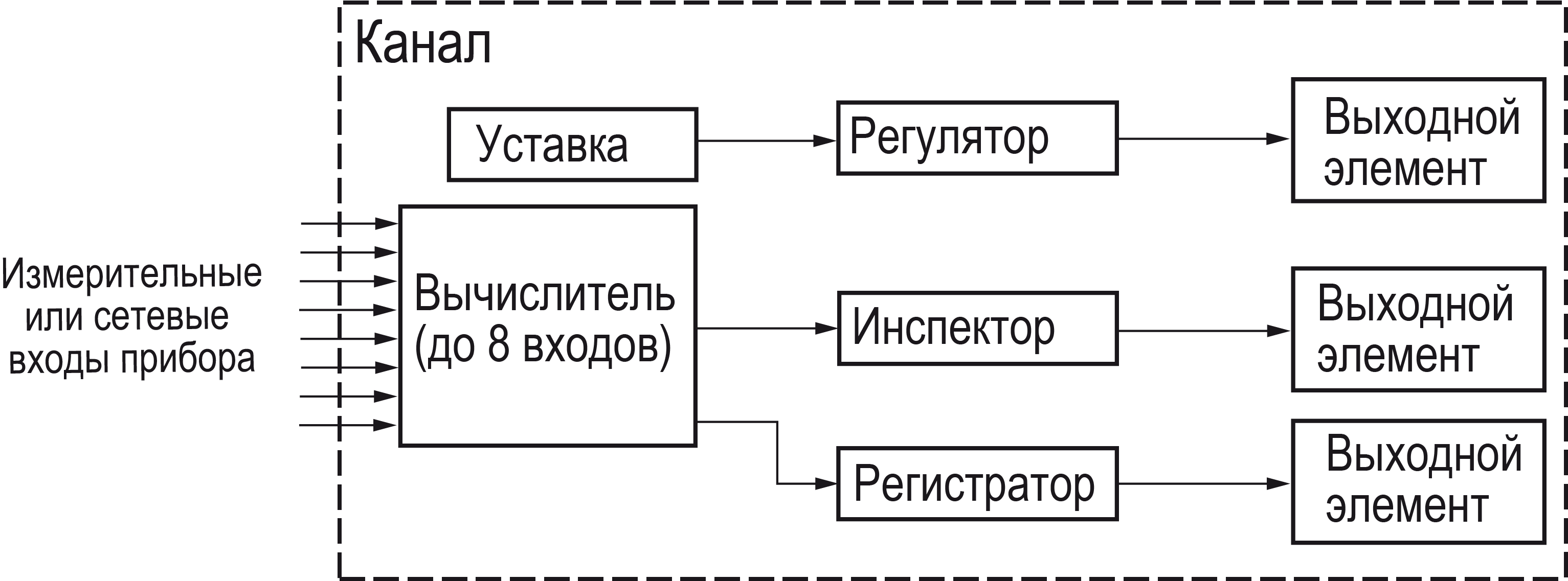
В состав Канал входят следующие основные единицы:
Вычислитель – программный модуль, который вычисляет выходную величину для регулятора, инспектора и регистратора;
Регулятор – модуль, который преобразует величину с Вычислителя по двухпозиционному или ПИД-закону
Инспектор – модуль, контролирующий возможный выход вычисленного значения за допустимые границы и выдающий сообщение об аварии;
Регистратор – модуль, который подает вычисленное значение на выходной элемент для дальнейшего преобразования в аналоговый сигнал.
В приборе предусмотрен набор параметров, регламентирующих работу Канала:
Вычислитель в Канале можно отключить параметром CAL.t
;Регулятор в Канале включается/отключается параметром rEGL
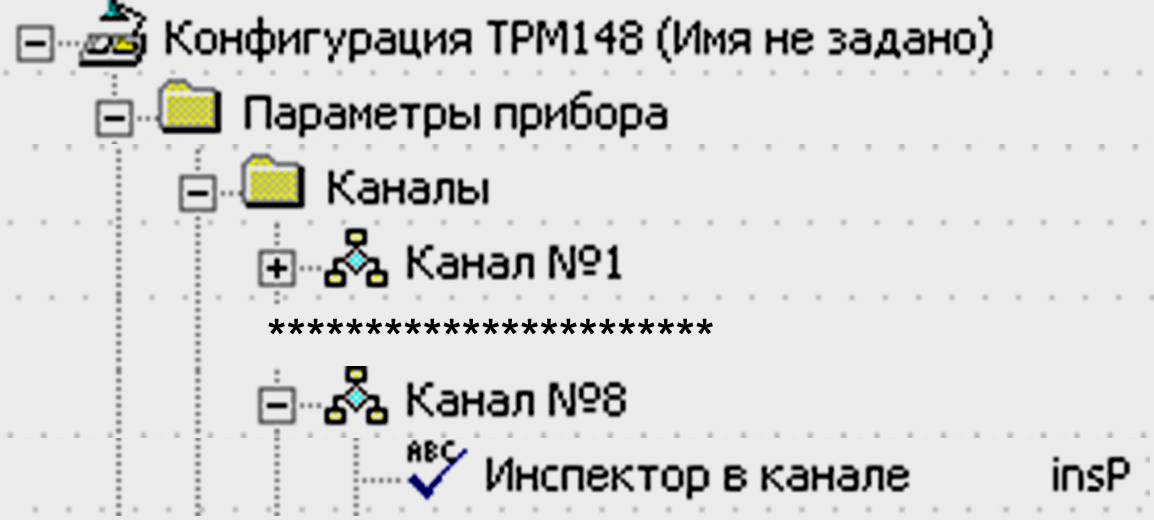
;Инспектор в Канале включается/отключается параметром insP
;Регистратор в Канале можно отключить параметром OP.i.
.
Фрагменты экранного интерфейса программы «Конфигуратор ТРМ148», на которых показан путь к параметрам CAL.t, rEGL, insP и OP.i, представлены далее в соответствующих разделах.
Тип датчика
Для каждого Входа следует задать тип подключенного к нему Датчика в параметре in-t, выбрав его из предложенного списка (в соответствии с таблицей).
Если вход не используется, то для него следует установить значение «Датчик не подключен».
Периодичность опроса датчиков
В приборе существует возможность установить период опроса Датчика на каждом Входе. Изменение мощности, подаваемой на ИМ, будет производиться с частотой, равной частоте опроса Входов.
Период опроса задается параметром itrL в секундах с точностью до 0,1 с.
Автоматическая коррекция показаний по температуре свободных концов ТП
Данная коррекция обеспечивает правильные показания прибора при изменении температуры окружающей его среды. Датчик температуры свободных концов термопар расположен внутри прибора у клеммных контактов.
Коррекция включается/выключается параметром CJ-.C.
Этот вид коррекции следует отключать, например, при проведении поверочных испытаний прибора. При отключенной коррекции температура свободных концов термопар принимается равной 0 °С и ее возможные изменения в расчет не принимаются.
Масштабирование шкалы измерения для активных датчиков
При работе с активными датчиками, выходным сигналом которых является напряжение или ток, текущие значения контролируемых величин вычисляются по масштабирующим коэффициентам. После масштабирования контролируемые физические величины отображаются непосредственно в единицах их измерения (атмосферах, килопаскалях, метрах и т. д.).
Для каждого датчика следует индивидуально установить диапазон измерения:
нижняя граница диапазона измерения задается параметром Ain.L и соответствует минимальному уровню выходного сигнала датчика;
верхняя граница диапазона измерения задается параметром Ain.H и соответствует максимальному уровню выходного сигнала датчика.
Пример
При использовании датчика с выходным током 4…20 мА, контролирующего давление в диапазоне 0…25 атм, следует задать Ain.L = 00,00 и AinH = 25,00. После этого обработка и отображение показаний будет производиться в атмосферах.
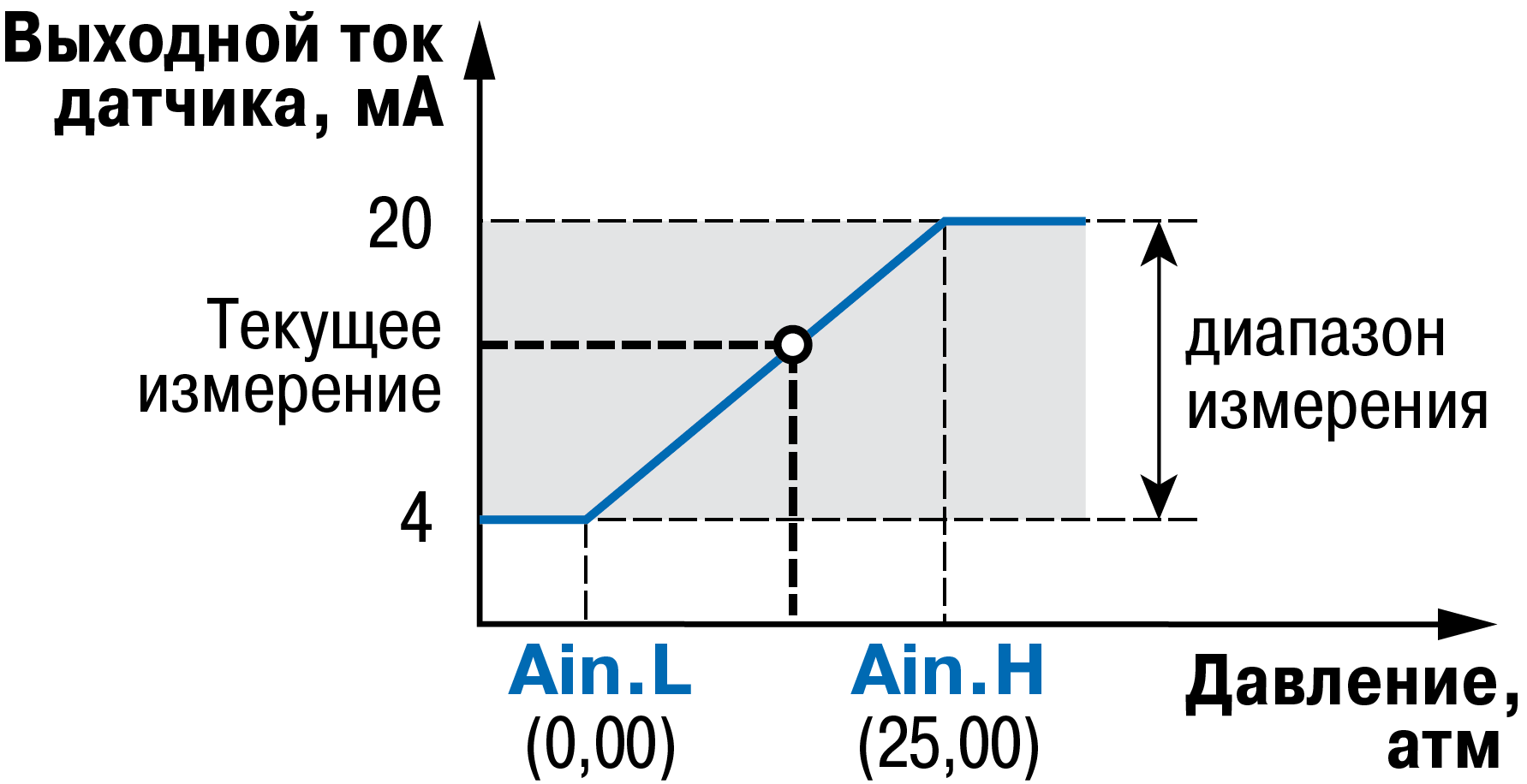
Далее сигналы обрабатывается в заданных единицах измерения по линейному закону (прямо пропорциональному при Ain.H > Ain.L или обратно пропорциональному при Ain.H < Ain.L).
Вычислитель в составе Канала
Вычислитель – программный модуль, который вычисляет выходную величину по одному или нескольким входным значениям. К Вычислителю подключается до 8 источников данных. Источниками данных являются собственные измерительные входы прибора.
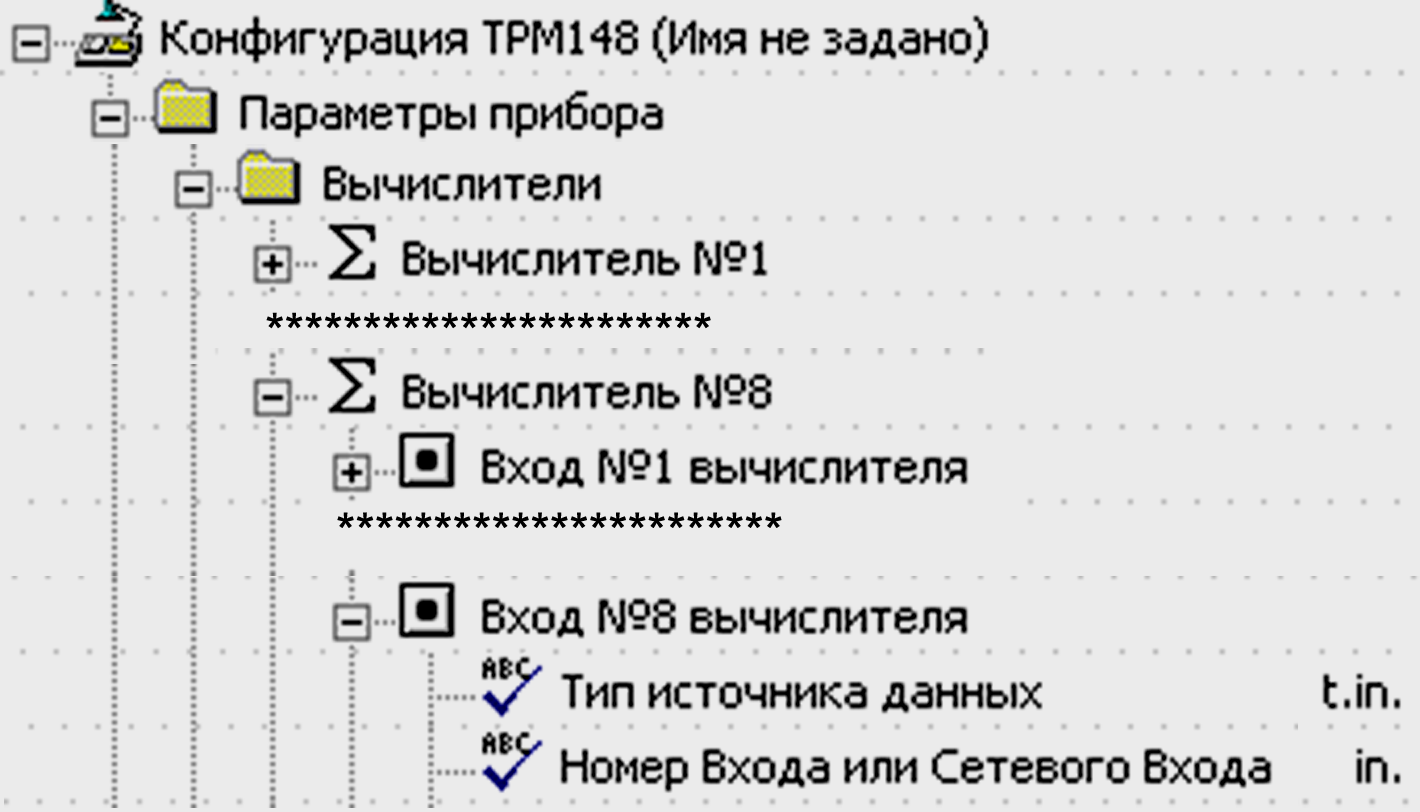
Тип источника данных Вычислителя задается в параметре t.in, а номер источника данных – в параметре in.
Вычислитель включен в Канал регулирования и жестко связан с тремя его блоками: регулятором, инспектором и регистратором. В эти три блока поступают данные с выхода Вычислителя. Чтобы использовать Вычислитель, канал регулирования должен быть подключен к Объекту.
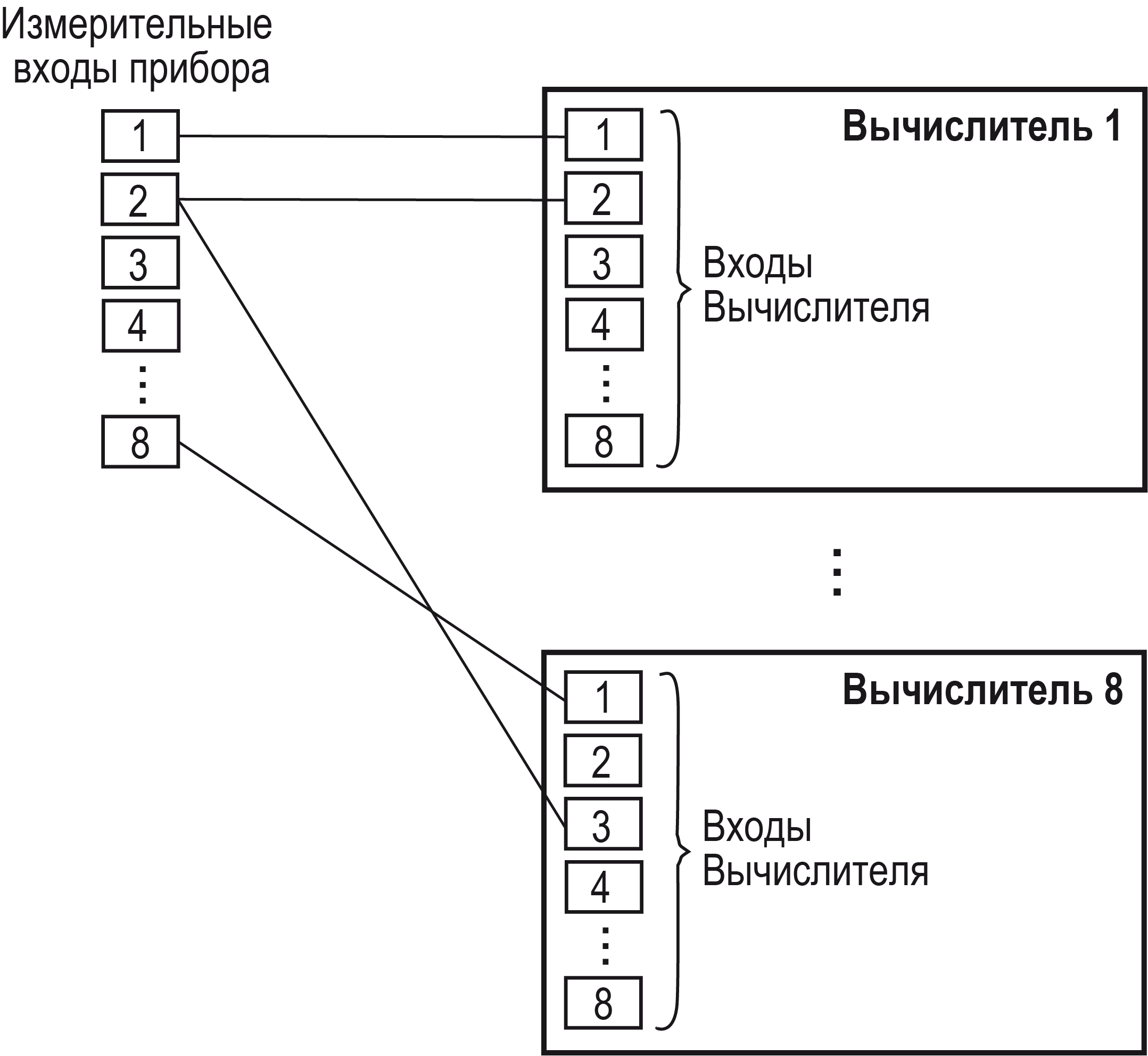
Пример схемы подключения измерительных и сетевых входов прибора ко входам Вычислителя представлен на рисунке.
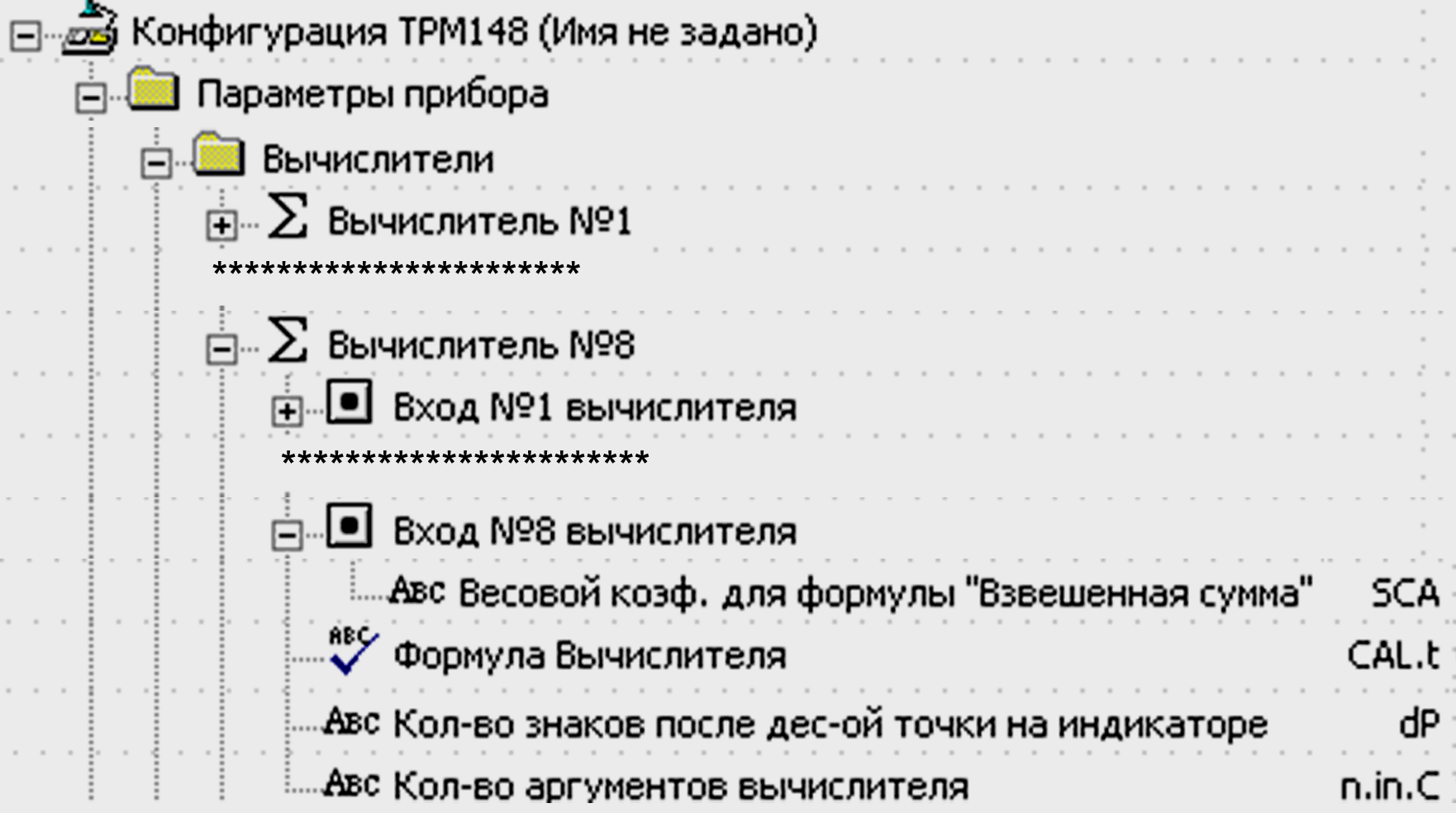
Для связи измерительных и сетевых входов с Вычислителями требуются следующие данные:
тип вычислителя (формула для вычисления) (параметр CAL.t);
количество используемых Входов (параметр n.in.c);
количество знаков после десятичной точки (параметр dP);
весовые коэффициенты измерительных входов при расчете взвешенной суммы или частного (параметр SCA).
Рекомендуется отключить фильтры вычислителей, установив в их параметрах нулевые значения.
Тип Вычислителя
Вычислитель может параллельно производить только один выбранный тип операций с входными величинами. Функциональное назначение (формулы для вычисления), по которому сконфигурирован вычислитель, и число используемых входных величин представлены в таблице.
Также в таблице представлены символы, которые отображаются на ЦИ при настройке режима работы Вычислителя с помощью кнопок прибора.
Варианты применения Вычислителя
Символы на ЦИ | Формула Вычислителя (параметр CAL.t) | Разрешенное число входов Вычислителя (параметр n.in.C) |
|---|---|---|
| REPT | Повторитель | 1 |
| SU | Взвешенная сумма | 1...8 |
| RAT | Частное | 2 |
| SQR | Квадратный корень | 1 |
| TOP | Максимум | 1...8 |
| BOTT | Минимум | 1...8 |
| ARIF | Среднее арифметическое | 1...8 |
| RH | Вычислитель влажности | 2, 3 |
| AURG | Медиана | 3, 5, 7 |
| OFF | Вычислитель отключен | параметр не задается |
Настройки вычислителя позволяют выполнять следующие функции:
Повторитель передает измеренное значение со входа Вычислителя на выход, не производя математических действий.
Следует установить значение Повторитель, если регулируемая физическая величина измеряется на Входе и не требует никаких дополнительных вычислений. Пример – мониторинг температуры, которая измеряется термопарой.
Взвешенная сумма вычисляется по формуле:

где К1…К8 – весовые коэффициенты для входов 1…8. Весовые коэффициенты К задаются параметрами SCA. Коэффициенты K могут быть целыми, дробными, положительными, отрицательными.
С помощью Взвешенной суммы вычисляется разность двух измеренных величин. Для этого нужно задать одному входу весовой коэффициент «– 1», а другому «+1».
Частное – результат деления первого входного значения на второе, вычисляемый с учетом весовых коэффициентов входных значений К, задаваемых параметрами SCA, по формуле:

Квадратный корень извлекается из значения, пришедшего на первый вход Вычислителя.
 ВниманиеИзвлечение квадратного корня из отрицательных чисел не допускается!
ВниманиеИзвлечение квадратного корня из отрицательных чисел не допускается!·Функции Минимум и Максимум передают наименьшее и наибольшее по величине из значений, пришедших на входы Вычислителя (с учетом знака).
Расчет влажности производится психрометрическим методом по температурам сухого и влажного термометров. На первый вход Вычислителя подается температура сухого термометра, на второй вход – температура влажного термометра.
Для более точного вычисления влажности используется значение атмосферного давления. Величина давления подается на третий вход Вычислителя и измеряется в гектопаскалях (гекто = 102). В случае отсутствия измеренного атмосферного давления оно принимается нормальным, равным 1013.25 гектоПа.
- Функция Медиана работает с нечетным количеством
входов Вычислителя. Вычислитель выбирает максимальное и минимальное
входные значения и отсекает их. С оставшимися входными величинами
он повторяет ту же процедуру – и так до тех пор, пока не останется
одно число, которое и будет значением функции Медиана.
Например, если Вычислитель получает 5 входных значений: «10», «88», «56», «40», «37» – то функция Медиана передает значение «40».
Вычислитель имеет два цифровых фильтра: НЧ-фильтр и пиковый. Они могут быть использованы для фильтрации величин, пришедших по сети RS-485.
Для фильтрации величин, измеренных собственными входами прибора, используются цифровые фильтры, входящие в модуль Входов прибора.
Количество знаков после десятичной точки
Вычисленная физическая величина отображается на четырехразрядном ЦИ1 с различной точностью. В параметре dP следует задать количество знаков, отображаемых после десятичной точки.
По умолчанию установлено значение dP = 1.
Если число слишком велико и не помещается на ЦИ, то прибор «отрезает» последние цифры, например: при dP = 2 число «485,84» отобразится как «485,8».
Просмотр остальных цифр возможен с помощью кнопки  .
.
Регулятор
Регулятор – это программный модуль, отвечающий за поддержание измеренной или вычисленной величины на заданном уровне, называемом Уставкой.
Регулятор канала включается/выключается с помощью параметра rEGL.
На вход Регулятора подается значение с Вычислителя того же Канала (контролируемая величина) и Уставка. На выходе Регулятор вырабатывает сигнал, направленный на уменьшение отклонения контролируемой величины от Уставки. Допускается изменение Уставки в процессе выполнения программы, для этого существуют Графики коррекции Уставки. Выходной сигнал Регулятора поступает на Выходное устройство сложной структуры, с помощью которого осуществляется управление одним или несколькими ИМ.
Для каждого Регулятора задаются следующие параметры:
режим работы (ПИД- или двухпозиционный регулятор);
зона нечувствительности;
для ПИД-регулятора – параметры ПИД-регулирования и автонастройки;
для двухпозиционного регулятора – гистерезис и задержки.
Пример
Значение выходного сигнала Регулятора равно 0,62. Тогда ИМ будет загружен на 62 %: если ИМ – задвижка, она будет открыта на 62 %; если ИМ – ТЭН, на него будет подан ШИМ-сигнал с соответствующей скважностью.
Отрицательное значение выходного сигнала Регулятора (от –1 до 0) означает, что следует включать ИМ, уменьшающие значение регулируемой величины – «холодильники».
Положительное значение выходного сигнала Регулятора (от 0 до +1) означает, что следует включать ИМ, увеличивающие значение регулируемой величины – «нагреватели».
Режимы работы Регулятора
Регулятор работает в двух режимах: ПИД-регулятор и Двухпозиционный регулятор (ON/OFF).
Режим работы Регулятора задается в параметре rEG.t.
ПИД-регулятор
ПИД-регулятор вырабатывает аналоговый сигнал, который задает выходную мощность ИМ и уменьшает отклонение текущего значения регулируемой величины от Уставки.
При работе с ВЭ типа ЦАП выходная мощность преобразуется в пропорциональный ей ток или напряжение.
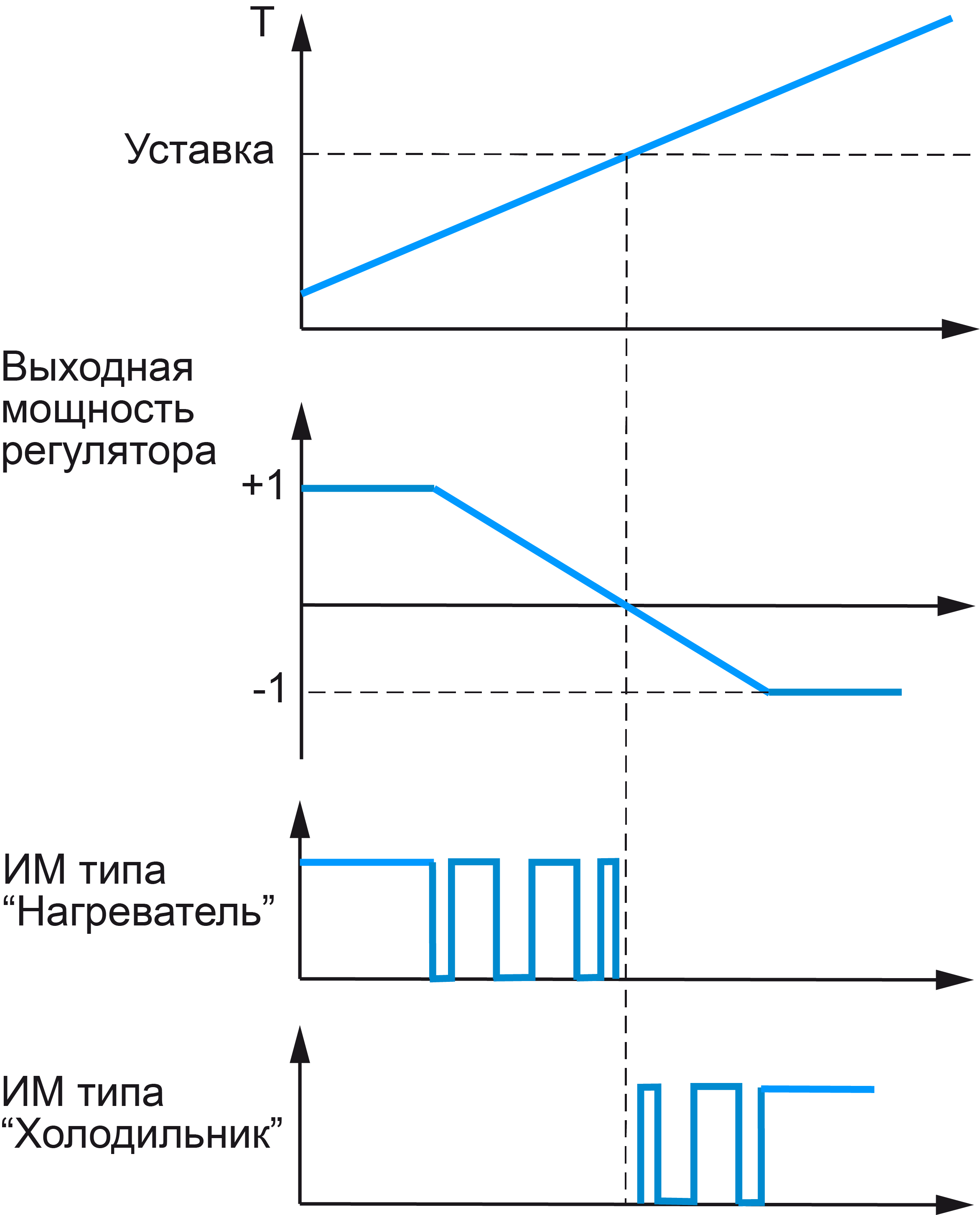
При работе с ВЭ дискретного типа выходная мощность преобразуется в ШИМ-сигнал, для которого следует задать период следования импульсов (параметр tHP).
Принцип формирования ШИМ-сигнала для управления системы «нагреватель-холодильник» представлен на рисунке на примере функционирования пропорционального регулятора.
ПИД-регулирование является наиболее точным методом поддержания контролируемой величины. Однако для эффективной работы ПИД-регулятора следует подобрать для конкретного объекта регулирования ряд коэффициентов.
Настройка ПИД-регулятора (подбор коэффициентов) довольно сложна, но она может быть выполнена в автоматическом режиме.
Номинальная выходная мощность. Ограничение накопления интегральной составляющей
Поведение объекта при классическом ПИД-регулировании демонстрирует черная кривая на рисунке.
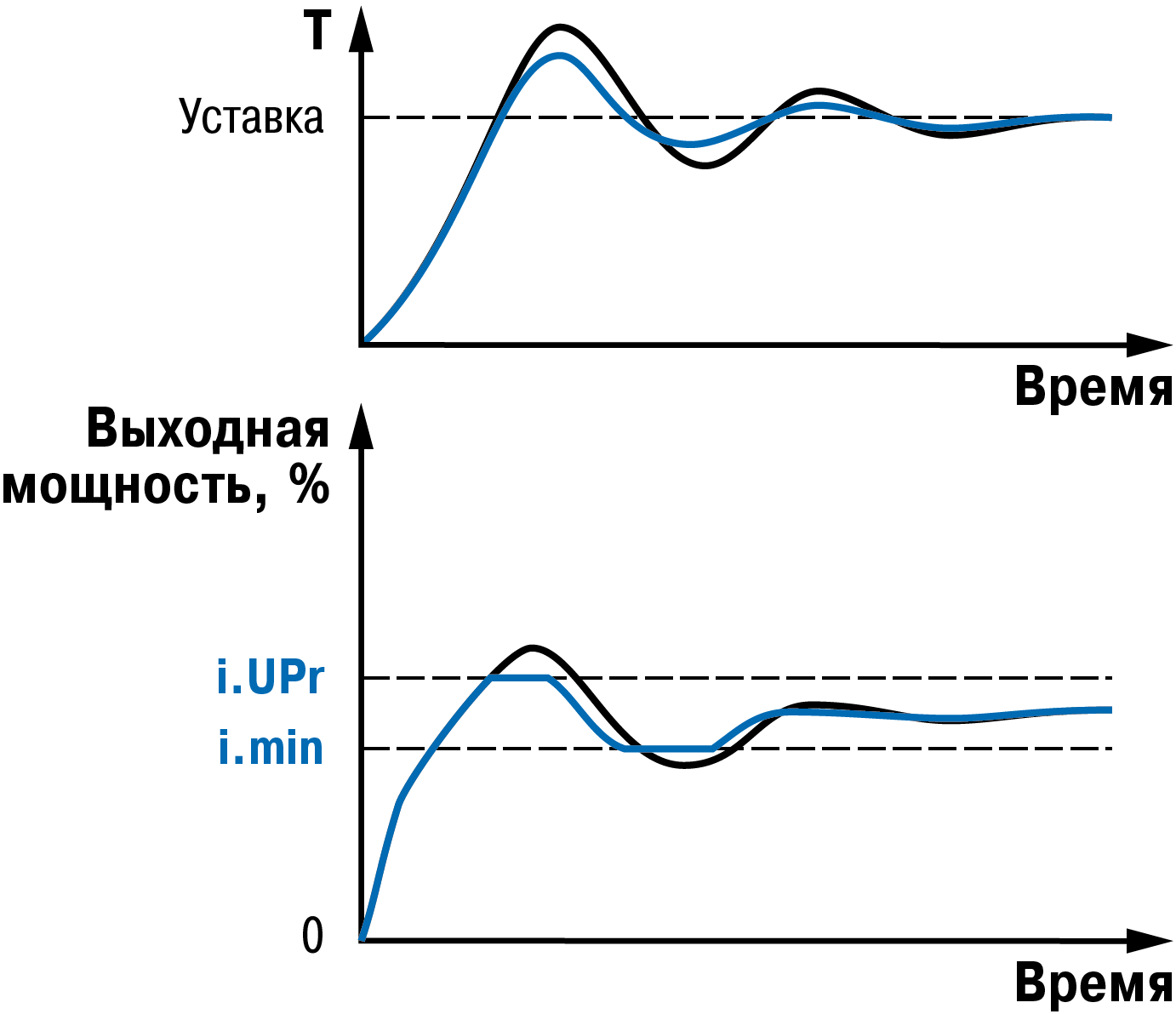
При длительном выходе на уставку ПИД-регулятор производит «перерегулирование» объекта. «Перерегулирование» связано с тем, что в процессе выхода на уставку накопилось очень большое значение интегральной составляющей в выходном сигнале регулятора (мощности).
После «перерегулирования» начинается уменьшение значения интегральной составляющей, что, в свою очередь, приводит к провалу ниже уставки – «недорегулированию». Только после одного-двух таких колебаний ПИД-регулятор выходит на требуемое значение мощности.
Во избежание «перерегулирования» и «недорегулирования» задать диапазон значений для накопленной интегральной составляющей:
ограничение максимума интеграла – параметр i.Upr – задает максимальный процент выходной мощности, полученной в результате накопления интегральной составляющей;
ограничение минимума интеграла – параметр i.min – задает минимальный процент выходной мощности, полученной в результате накопления интегральной составляющей.
Пример
Имеется печь, о которой из опыта известно, что для поддержания определенной уставки требуется мощность от 50 % до 70 %. Разброс мощности в 20 % вызван изменениями внешних условий, например температуры наружного воздуха. «Перерегулирование» и «недорегулирование» в системе уменьшится после задания ограничений для интегральной составляющей. Для данного случая требуется задать i.min = 50 и i.UPr = 70 (см. рисунок, синяя кривая).Для уменьшения колебаний при переходных процессах можно также задать номинальную мощность. Номинальная мощность – это средняя мощность, которую надо подать в объект регулирования для достижения требуемой уставки. В рассматриваемом примере номинальную мощность P.nom нужно задать равной 60 %. Тогда при работе к значению выходной мощности, рассчитанной ПИД-регулятором, будет прибавляться номинальная мощность. При задании номинальной мощности параметры ограничения интеграла следует задать от значения P.nom. Соответственно, в примере для достижения значения интегральной составляющей от 50 до 70 % и при P.nom = 60 % следует задать i.min = –10 %, а i.UPr = +10 %.
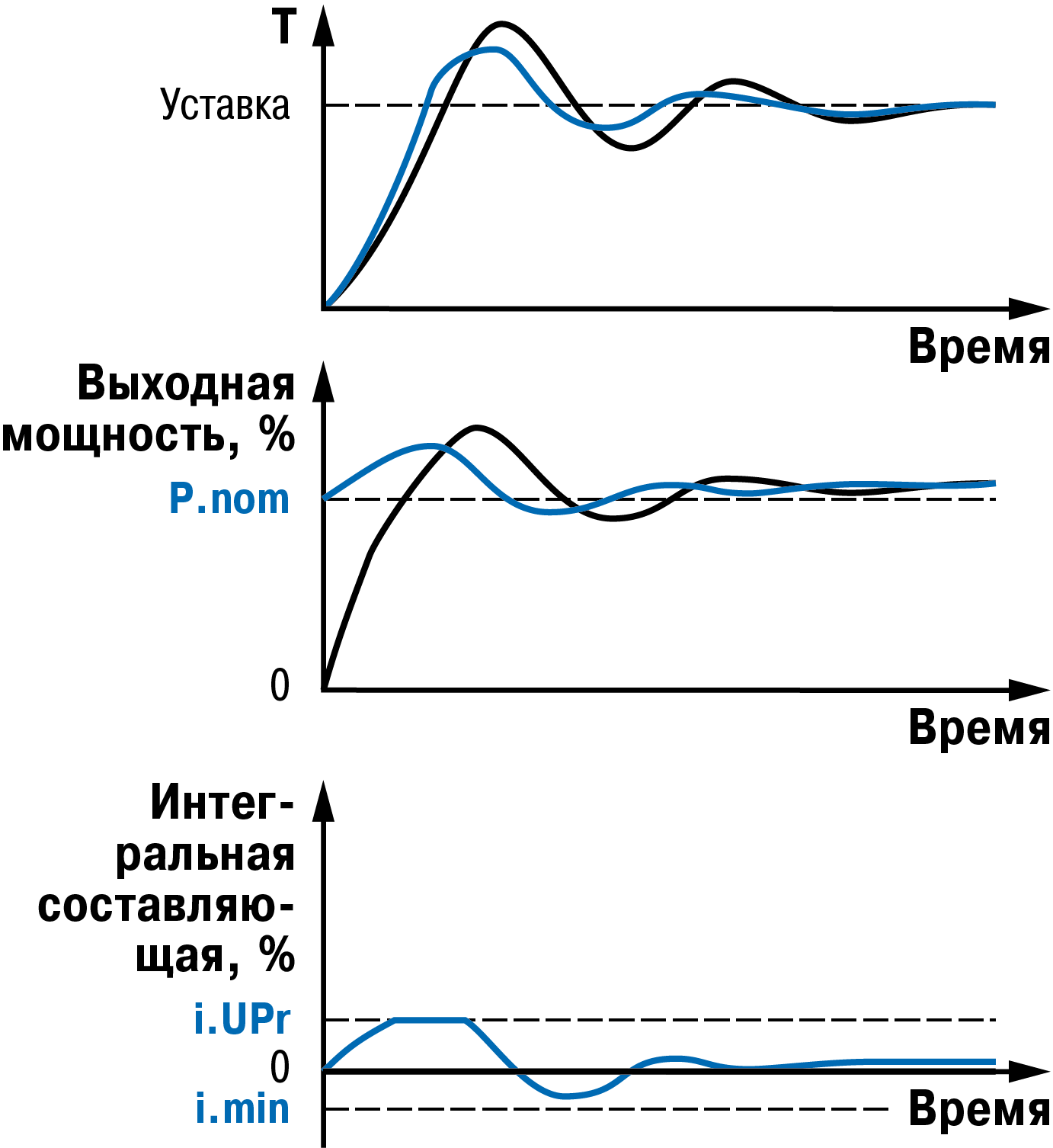
Работа системы с заданной номинальной мощностью и ограничениями интегральной составляющей показана на рисунке. Переходный процесс протекает быстрее, т. к. значение выходной мощности сразу начинает расти от P.nom, а не от нулевого значения.
Также задание Р.nom следует при использовании ПД-регулятора.
Значение параметра db (зона нечувствительности) влияет на величину полосы пропорциональности (Pb), смещая её в сторону уменьшения (для нагревателя) на db/2.
Коэффициент мощности холодильника P.CLD задает соотношение мощности холодильника и нагревателя при регулировании системы "нагреватель-холодильник". Параметр показывает мощность холодильника, если принять мощность нагревателя за 1.
Параметр P.CLD автоматически определяется во время настройки ПИД, в т. ч. и для системы с чистым «нагревателем», где этот параметр не используется.
Автоматическая настройка ПИД-регуляторов
Автоматическая настройка ПИД-регулятора нужна для того, чтобы за короткое время определить параметры Регулятора, которые будут использоваться в последующем процессе регулирования.
Во время автонастройки производится регулирующее воздействие на объект в большом диапазоне и с большой скоростью изменения. Это может привести к выходу объекта регулирования из строя, например, вследствие гидравлических ударов или недопустимых температур.
Общие правила проведения автонастройки ПИД-регулятора
Процесс автонастройки проходит непосредственно на объекте, поэтому следует предварительно задать конфигурацию прибора, а также подключить к нему требуемые датчики и ИМ.
Условия, в которых проводится автонастройка, должны быть максимально приближены к реальным условиям эксплуатации объекта.
Автонастройка ведется для каждого Канала в отдельности.
Если технические условия эксплуатации объекта не допускают изменения регулирующего воздействия в широком диапазоне и со значительными скоростями изменения, то следует задать приблизительную настройку Регулятора в ручном режиме
Для исполнительных механизмов, которые различаются по характеру физического воздействия на регулируемый объект, методы проведения Автонастройки также будут различаться. ИМ прибора подразделяются на следующие типы:
с ненулевым временем перевода рабочей части ИМ из одного крайнего положения в другое;
с нулевым временем перевода рабочей части ИМ из одного крайнего положения в другое.
Автоматическая настройка ИМ с ненулевым временем перевода рабочей части ИМ из одного крайнего положения в другое (типа задвижки)
К исполнительным механизмам с ненулевым временем хода относятся различные задвижки, поворотные клапана, шторки, жалюзи и т. д. Отличительной особенностью таких им является то, что перевод рабочей части из одного положения в другое осуществляется за время от нескольких секунд до нескольких десятков минут. Это время хода требуется учитывать при вычислении параметров ПИД-регулятора при автонастройке.
ИМ с ненулевым временем хода могут быть трехпозиционного типа (т. е. управляемые сигналами больше/меньше/стоп, требующие для управления двух реле) или ИМ с аналоговым управлением (управляются унифицированным сигналом от 4 до 20 мА или унифицированным сигналом от 0 до 10 В).
Для проведения автонастройки при управлении задвижкой следует:
Полностью сконфигурировать прибор в соответствии с подключаемыми к нему датчиками и исполнительными механизмами.
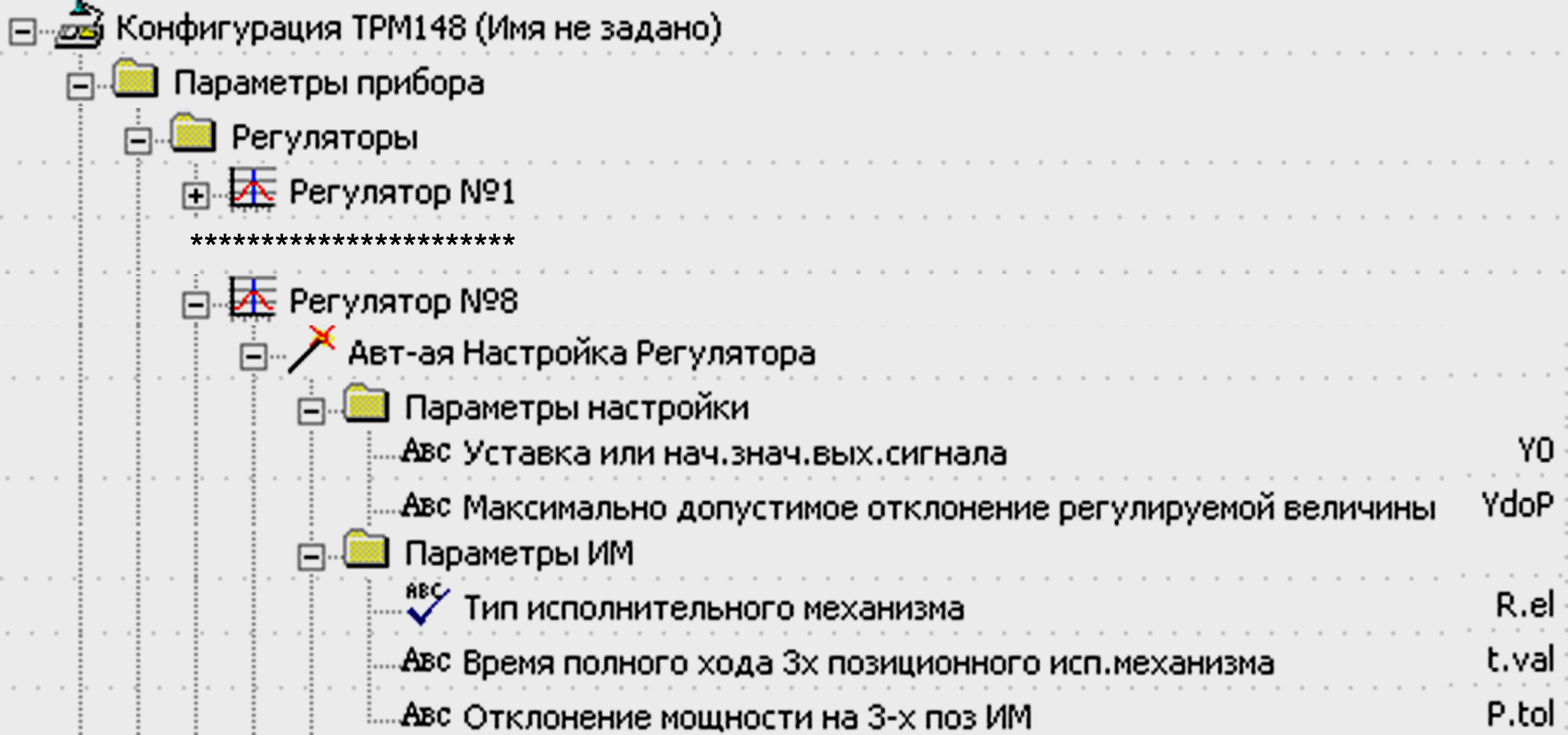
Задать из Конфигуратора (или с лицевой панели прибора) параметр автонастройки Y0 для выбранного канала регулирования -- начальное значение мощности, при которой будет проходить автонастройка в %.
Установить в параметре YdoP "максимальное допустимое отклонение регулируемой величины". В процессе автонастройки регулируемая величина будет колебаться с амплитудой YdoP. Слишком большое значение YdoP приведет к недопустимому воздействию на управляемый объект. Напротив, при слишком малом значении YdoP воздействие на объект будет недостаточным, и его параметры будут определены неточно. При регулировании температуры оптимальное значение YdoP находится в диапазоне 5...30 с.
Задать параметр R.el – «тип исполнительного механизма по характеру физического воздействия на объект регулирования» и параметр t.val – «время перевода рабочего органа ИМ из одного крайнего положения в другое» – в секундах.
Для корректной работы задвижки с аналоговым управлением значение параметра r.el должно быть «ИМ типа задвижка», а значение параметра se.p – двух позиционный ИМ.ВниманиеДля трехпозиционного ИМ следует задать время полного хода из одного крайнего положения в другое в двух параметрах: t.val и tР.Н. Если значения параметров t.val и tp.h не будут совпадать, это может привести к ошибочному расчету коэффициентов регулятора при АНР. При использовании конфигуратора на среднем уровне доступа эти параметры автоматически синхронизируются, и значение tР.Н будет скопировано из t.val.Для ИМ с аналоговым управлением задается только параметр t.val.
Задать параметр «допустимое отклонение мощности» Рtol, в папке «параметры ИМ», который отвечает за отклонение мощности в процентах от установившегося значения. Рекомендуемый интервал 5…10 %. Меньшее значение следует устанавливать при отсутствии в процессе настройки воздействий на объект или при наличии ограничений на условия эксплуатации объекта.
Для проведения автонастройки прибора следует:
Для входа в режим автонастройки одновременно нажать кнопки
 +
+  (порядок
нажатия важен). На ЦИ1 отображается слово «anr».
(порядок
нажатия важен). На ЦИ1 отображается слово «anr».Для подтверждения входа в режим нажать кнопку
 .
.Выбрать Объект, в котором находится настраиваемый регулятор, кнопками
и  . Для подтверждения выбора объекта
нажать кнопку .
. Для подтверждения выбора объекта
нажать кнопку .С помощью кнопок
и , регулировать работу
ИМ (процесс отображается на ЦИ2, регулируемая величина - на ЦИ1).
Стабилизировать значение величины в требуемом диапазоне. По окончании
стабилизации нажать кнопку .Проконтролировать изменение величины на ЦИ1 и выходного сигнала на ЦИ2.
Прибор должен работать в режиме двухпозиционного регулирования с переключением выходного сигнала регулятора между максимальным Рmax = Рstab + Рtol и минимальным Рmin = Рstab — Рtol уровнями, где Рstab – значение выходного сигнала регулятора, при котором был запущен процесс автонастройки (см. п 3).
Когда настройка выполнена, на ЦИ2 мигает сообщение donE.
Нажать кнопку
.Прибор возвращается из режима автонастройки в состояние СТОП.
Автоматическая настройка ИМ с нулевым временем перевода рабочей части ИМ из одного крайнего положения в другое (типа ТЭН)
Исполнительный механизм с нулевым временем хода – это ИМ, время перевода которого из выключенного состояния во включенное пренебрежимо мало. К таким ИМ относятся различные ТЭН, электродвигатели, отсечные клапаны, форсунки и т. д.
Для проведения АНР при управлении ИМ типа ТЭН следует:
Полностью сконфигурировать прибор в соответствии с подключаемыми к нему датчиками и исполнительными механизмами.
Задать из Конфигуратора (или с лицевой панели прибора) параметры Y0 (значение Уставки для автонастройки) и YdoP (допустимые колебания регулируемой величины) для выбранного Канала регулирования.
Задать тип исполнительного механизма: R.el – ИМ типа «ТЭН».
Последовательность действий с прибором:
Для входа в режим Автонастройки одновременно нажать кнопки
+ (порядок
нажатия важен). На ЦИ1 отображается слово ANR.Для подтверждения входа в режим нажать кнопку
.Выбрать Объект, в котором находится настраиваемый Регулятор, кнопками
и . Для подтверждения выбора нажать
кнопку .Проконтролировать изменение величины на ЦИ1 и выходного сигнала на ЦИ2.
Прибор должен работать в режиме двухпозиционного регулирования с переключением выходного сигнала регулятора между максимальным Pmax = 100 % и минимальным Pmin = 0 % уровнями.
Когда настройка выполнена, на ЦИ2 мигает сообщение DONE на ЦИ2.
Нажать кнопку
. Прибор
возвращается из режима Автонастройки в состояние СТОП.
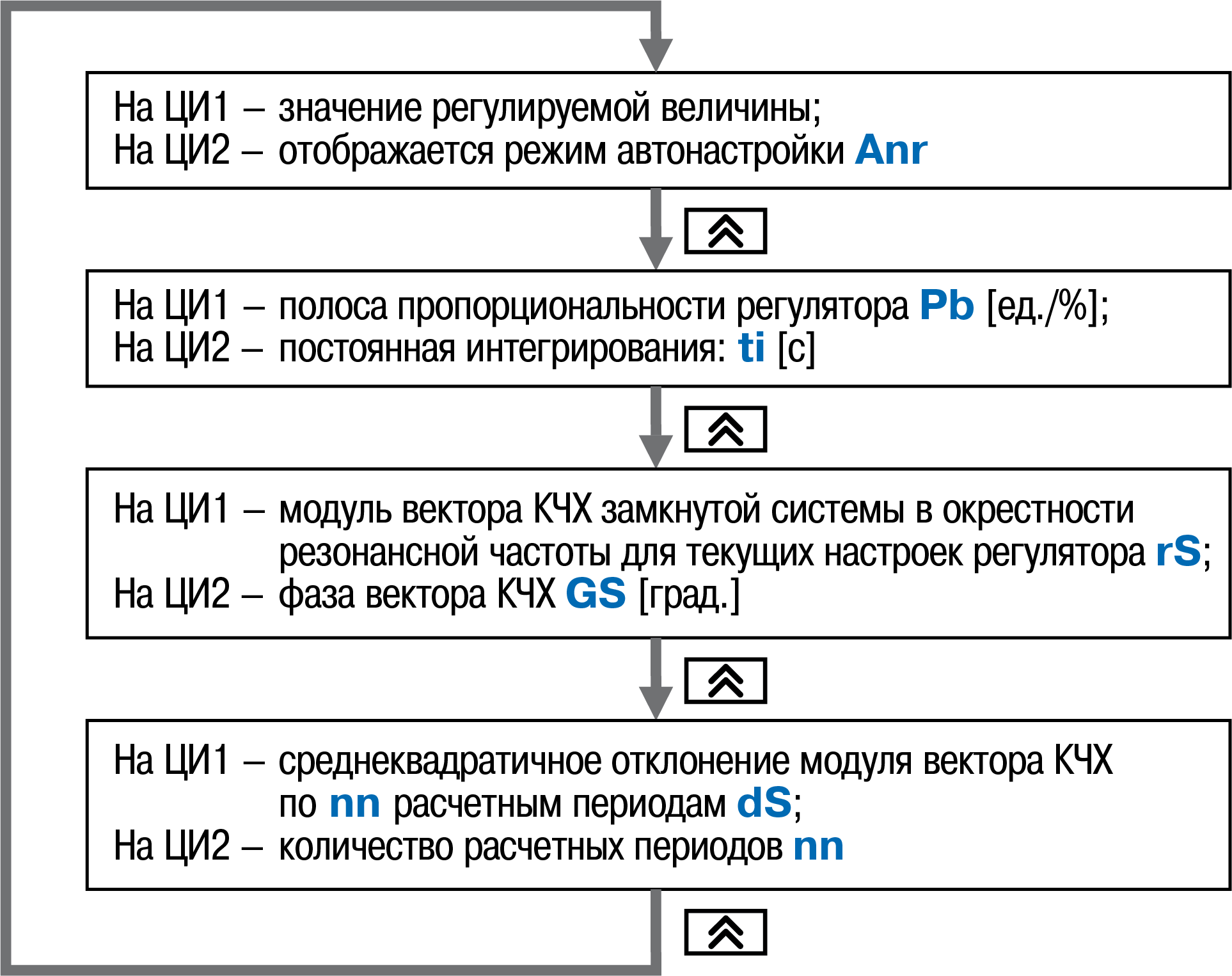
Индикация параметров автонастройки
Текущие значения регулируемой величины и выходного сигнала Регулятора
по умолчанию отображаются на ЦИ1 и ЦИ2 соответственно. Нажатием кнопки можно вывести на эти ЦИ текущие
значения других параметров (см. рисунок)
Остановка автонастройки
В процессе эксплуатации прибора могут возникнуть ситуации, когда процесс автонастройки следует прервать.
Для остановки автонастройки следует выполнить:
Нажать кнопку
.На ЦИ1 отображается: HALT.
Прибор запрашивает подтверждение выхода.
Для подтверждения выхода из автонастройки нажать
. Для возобновления автонастройки нажать . Прибор переходит в Рабочий режим индикации
(при отмене – возвращается в режим Автонастройки).
Возможные проблемы при проведении автонастройки
Проблемы при АНР и способы их устранения
Проблема | Показания | Возможные причины | Способы устранения | |
|---|---|---|---|---|
ЦИ2 | ЦИ1 | |||
| Автонастройка не запускается | STOP (StoP) мигает | SP.PW (SP.Pw) | Попытка запустить АНР, когда тип уставки задан как «мощность» | Изменить Тип уставки при работе прибора |
| Автонастройка завершилась неудачно | FAIL (FAiL) | N.LIN (n.Lin) | Объект управления существенно нелинеен (например, нагрев происходит значительно быстрее охлаждения; ИМ выходит на 100 % мощности) | Уменьшить амплитуду воздействия (параметр YdoP) или изменить значение Уставки |
| DSKO (dSKo) | Число периодов превысило допустимое значение; амплитуды колебаний этих периодов значительно отличаются друг от друга (возможно при сильных помехах) | Увеличить амплитуду воздействий (параметр YdoP) или допуск среднеквадратичного отклонения (параметр dSKo) | ||
Период возмущающих колебаний слишком мал | Увеличить интегральную постоянную (параметр ti) | |||
| PB (Pb) | Вычисленное значение полосы пропорциональности недопустимо и выходит за пределы [0,001...9999] | Увеличить амплитуду воздействий (параметр YdoP) и повторить автонастройку
Если она закончится с тем же результатом, использовать двухпозиционный (ON/OFF) регулятор | ||
| TI (ti) | Вычисленное значение постоянной интегрирования недопустимо и выходит за пределы [0...65535] | |||
| P.CLD (P.CLd) | Вычисленное значение коэффициента холодильника недопустимо и выходит за пределы [0,01...10,00] | |||
Ручная подстройка ПИД-регулятора
Ручная подстройка осуществляется итерационным методом с оценкой процесса по двум показателям:
- наличие колебаний;
- переход графика регулируемой величины через уставку.
Настройка ПИД-регулятора может пройти некорректно в следующих системах:
- с непрогнозируемыми внешними возмущающими воздействиями;
- с разнородными нагрузками (например, ГВС днем и вечером).
В зависимости от показателей параметры корректируются по рекомендациям:
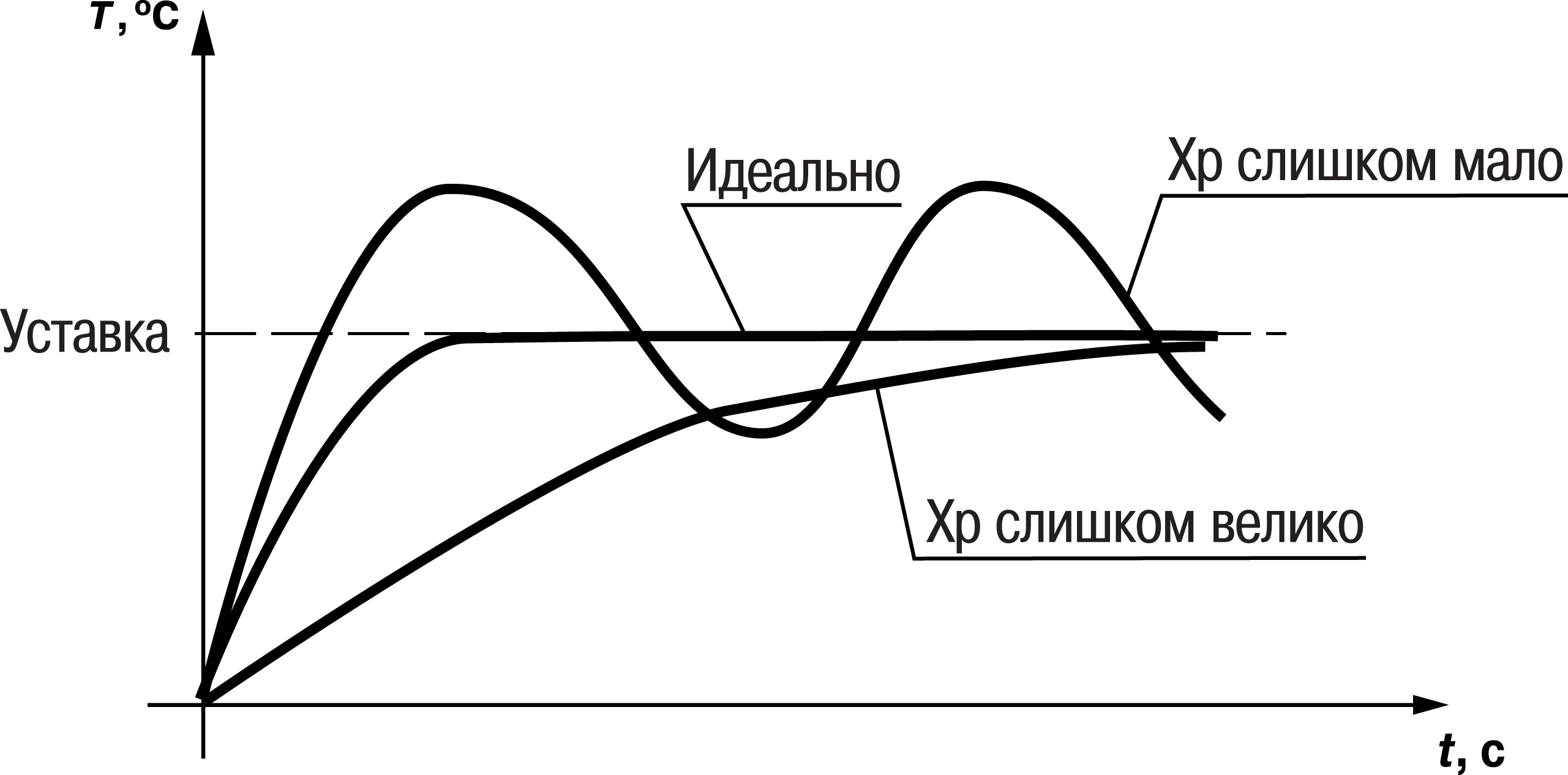
- увеличение параметра Кп (уменьшение Xp) способствует увеличению быстродействия регулятора, но амплитуда колебаний регулируемой величины может возрасти до недопустимого уровня;
- уменьшение Кп (увеличение Xp) способствует уменьшению колебаний регулируемой величины, вплоть до исчезновения, но ухудшается быстродействие регулятора и повышается вероятность колебаний регулируемой величины;
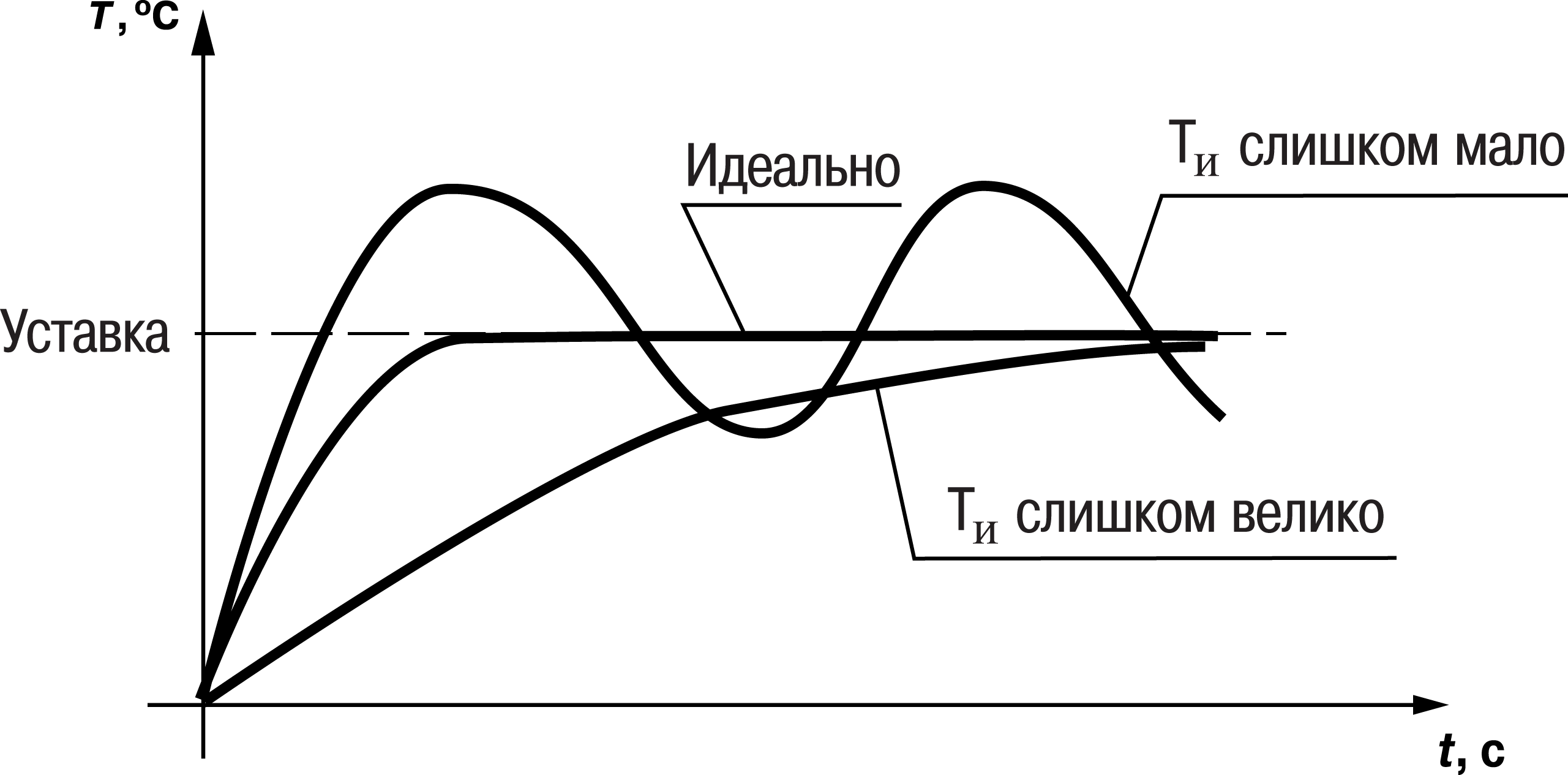
- при завышенном значении Ти процесс подхода регулируемой величины к уставке становится односторонним даже при наличии колебаний, но быстродействие регулятора уменьшается;
- при заниженном значении Ти появляется значительный переход регулируемой величины через уставку, но существенно ухудшается быстродействие регулятора и повышается вероятность колебаний регулируемой величины;
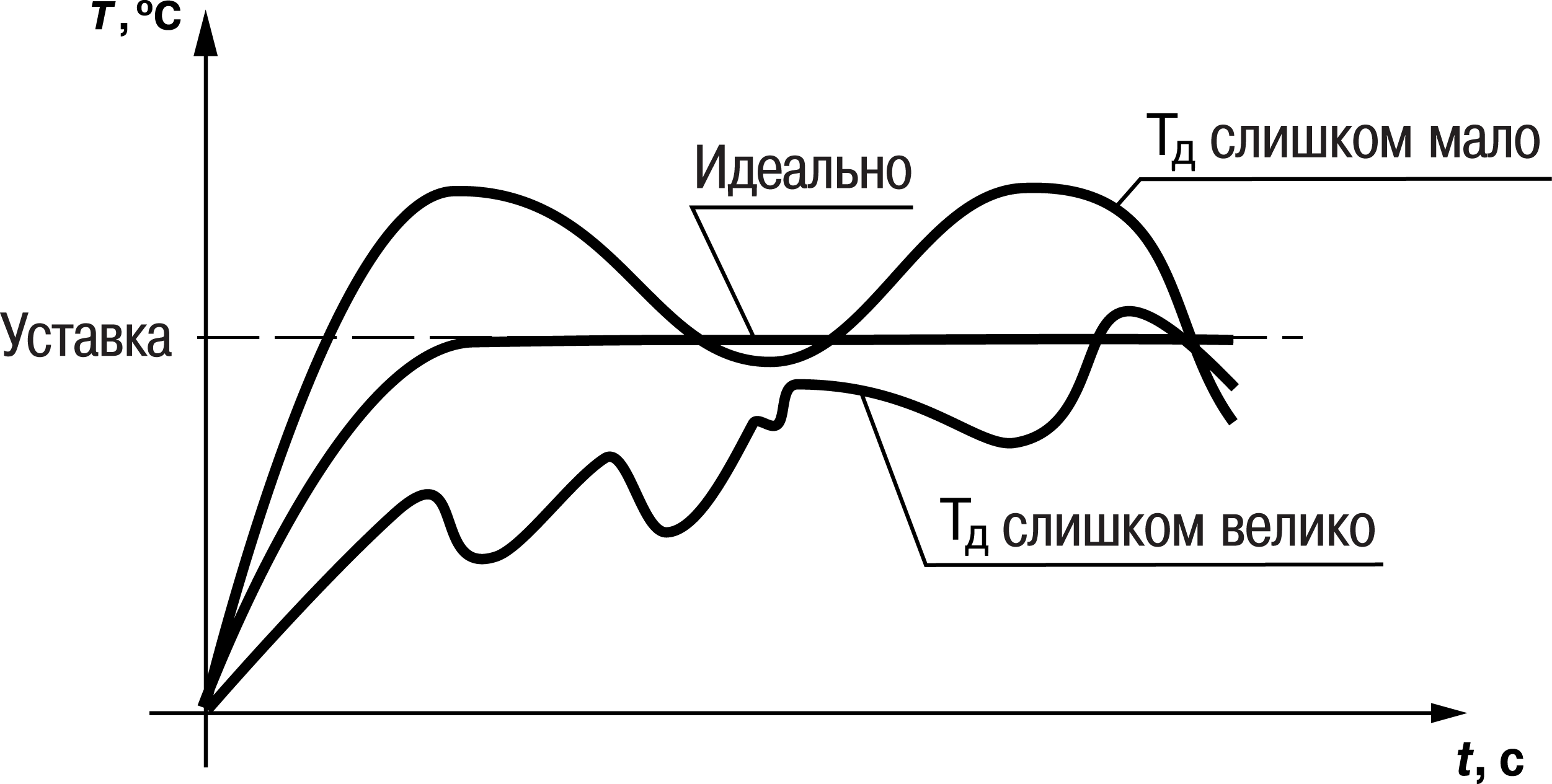
- увеличение Тд способствует повышению быстродействия системы, но повышается ее чувствительность к помехам и возможно появление высокочастотных колебаний регулируемой величины с малым периодом.
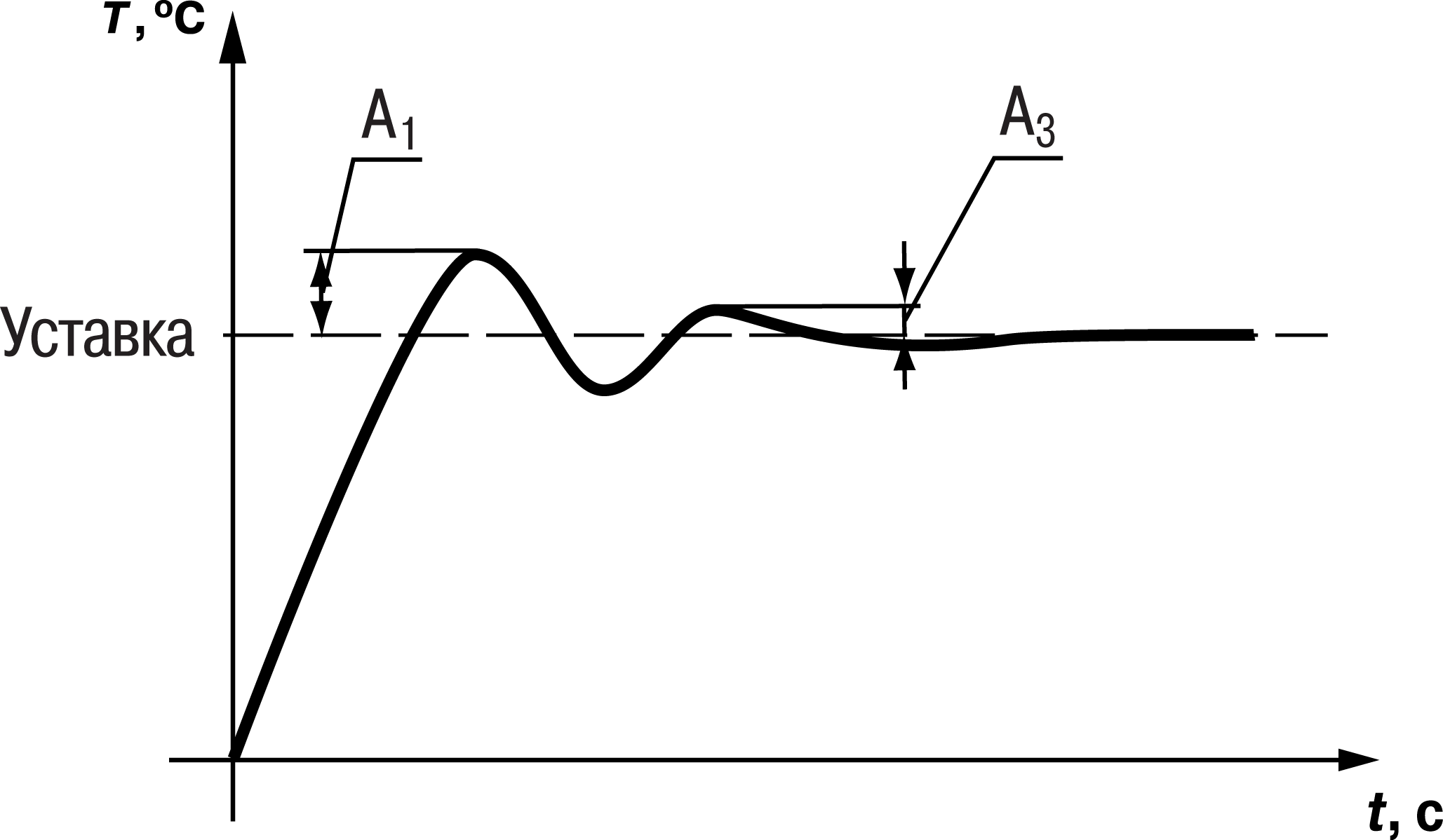
При оптимальной подстройке регулятора график регулируемой величины должен иметь минимальное значение показателя ошибки регулирования (А1) при достаточно степени затухания φ = 1 – А3/А1 (0,8…0,9).
Пример ручной настройки ПИД-регулятора
Для настройки ПИД-регулятора следует:
На приборе установить (диапазон параметров приведен в Приложении Настраиваемые параметры) следующие значения:
- ХP = 9999;
- τи = 0;
- τд = 0.
- Задать уставку.
- В ходе наблюдений фиксировать значения регулируемого параметра (скорость и время подхода к уставке).
- В ходе настройки руководствоваться таблицей.
Описание шагов примера
Шаг | Параметры | Оценка процесса | Решение |
|---|---|---|---|
| 1 | ХP = 9999 τи = 0 τд = 0 | Долго подходит к уставке, не пересекает | Уменьшить ХP (в два раза) |
| 2 | ХP = 5000 τи = 0 τд = 0 | Быстрее подходит к уставке, не пересекает | Уменьшить ХP (в два раза) |
| 3 | Сделать несколько итераций, до тех пор, пока появятся признаки колебаний. Измерить период (Тк). Для следующей итерации можно принять τи = Тк / 2 для ускорения процесса настройки | 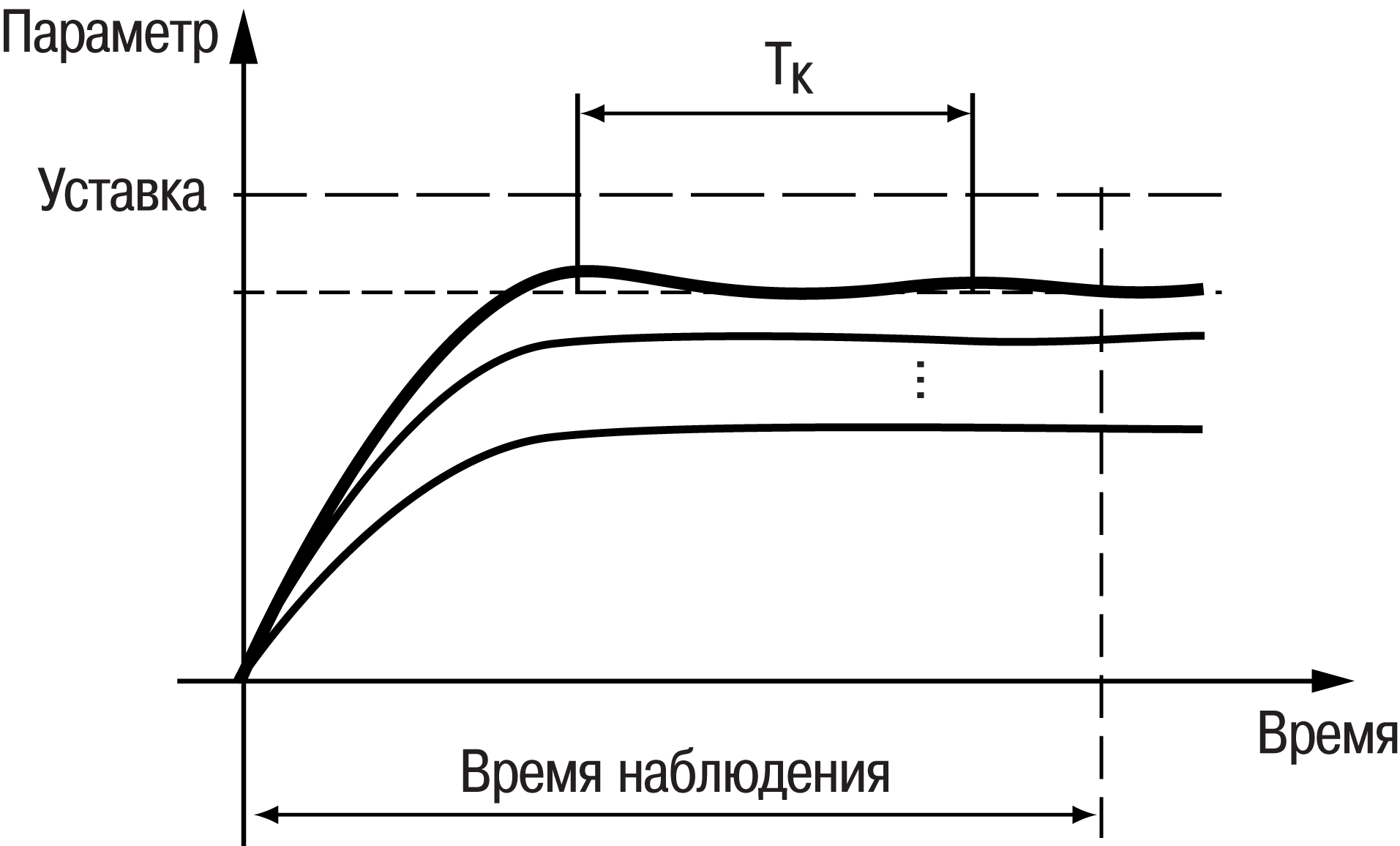 | |
| 4 | ХP = 500 τи = Тк / 2 τд = 0 | Очень быстро подходит к уставке, не пересекает, колебательность усилилась | Зафиксировать ХP , изменить τи |
| 5 | ХP = 500 τи = 2000 τд = 0 | Подходит к уставке, не пересекает | Уменьшить τи (в два раза) |
| 6 | ХP = 500 τи = 1000 τд = 0 | Подходит к уставке, не пересекает | Уменьшить τи и ХP (в два раза) |
| 7 | Сделать несколько итераций до тех пор, пока регулируемая величина не пересечет уставку и начнет колебания около этого значения | 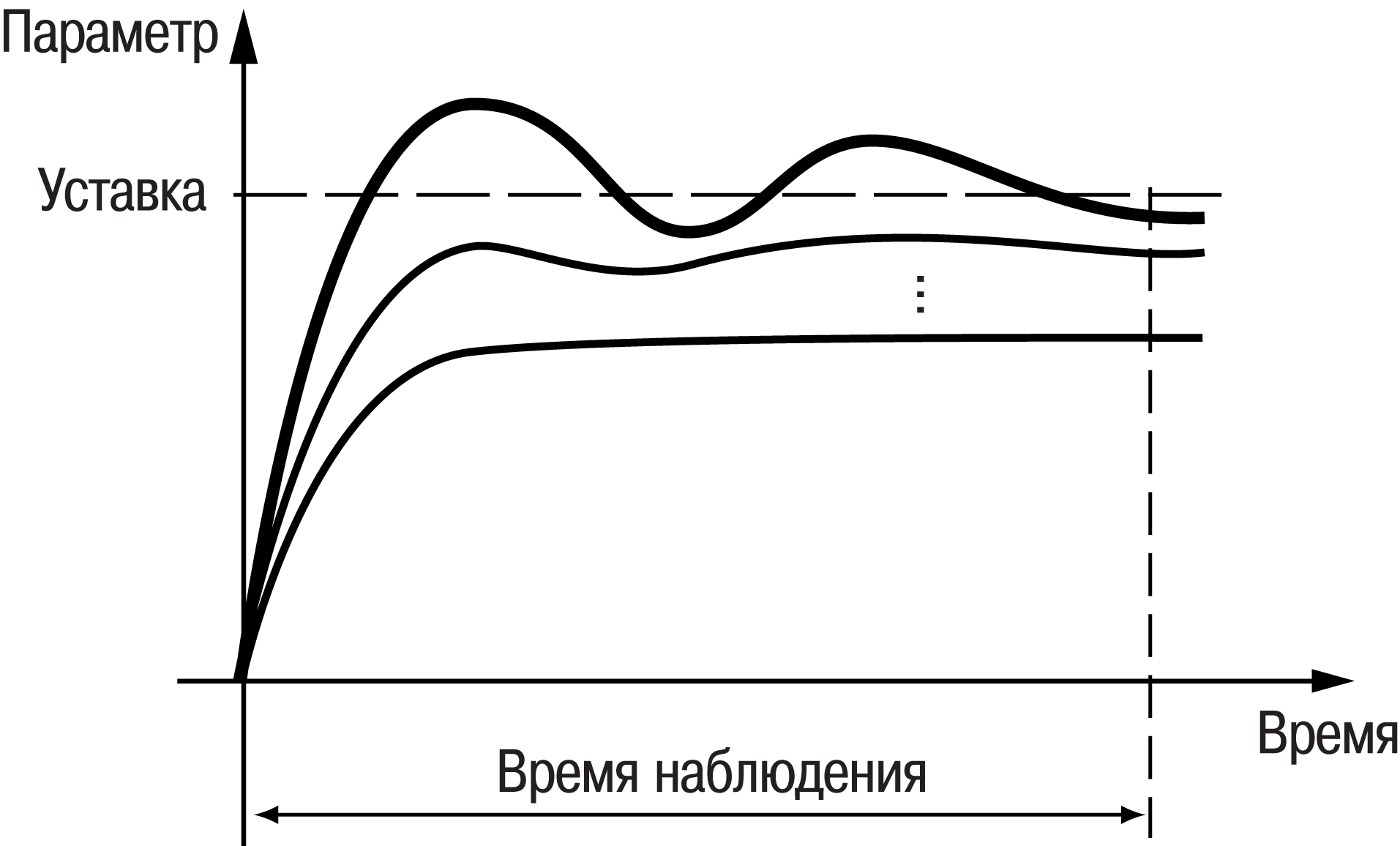 | |
| 8 | ХP = 125 τи = 250 τд = 0 | Регулируемая величина пересекла уставку. Проверить соотношение амплитуд А3 / А1 ≈ 0,1 Если колебания удовлетворяют условию – регулятор настроен. Если нет — фиксировать τи и ХP, задать τд = τи / 5 | 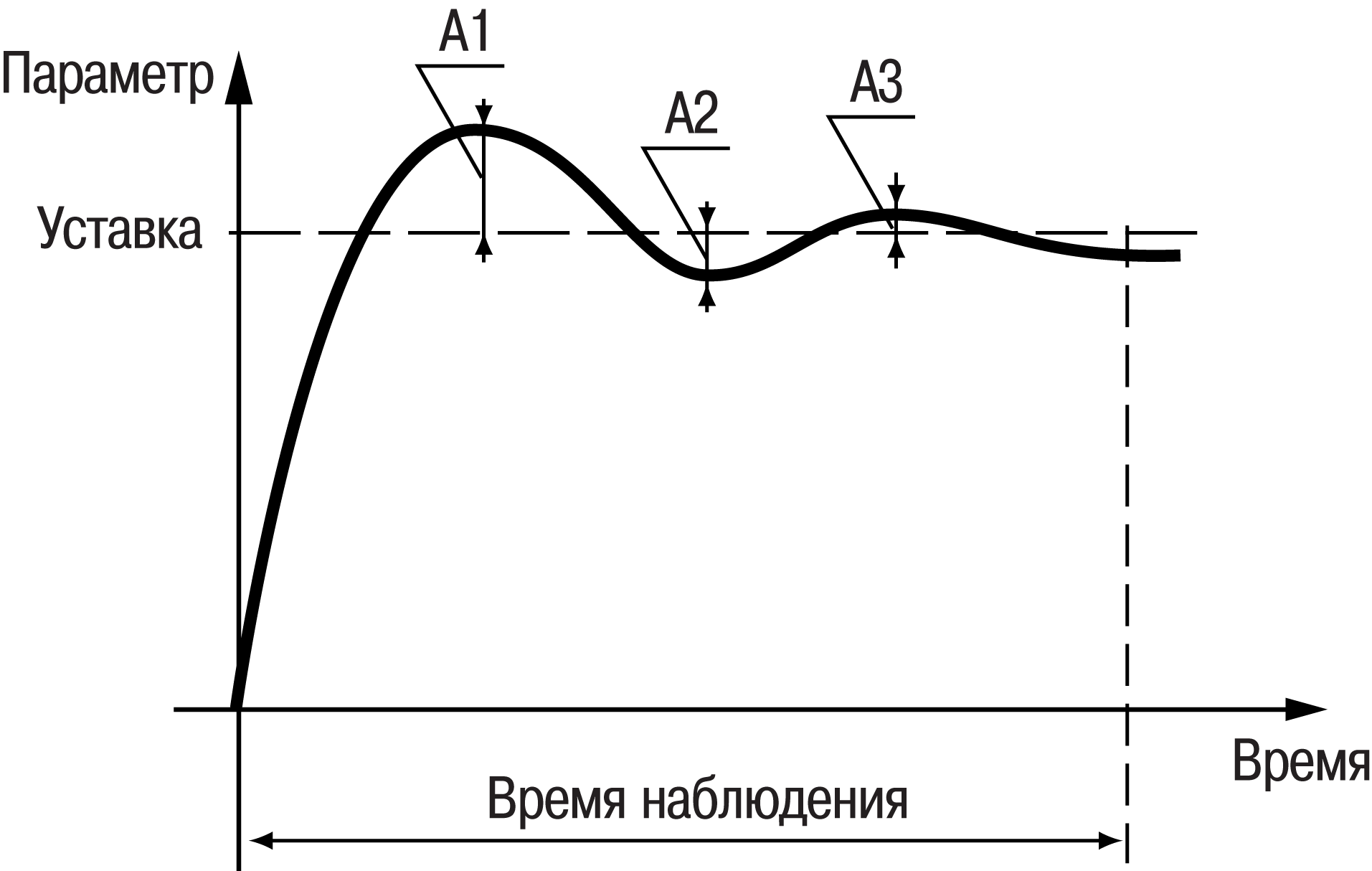 |
| 9 | ХP = 125 τи = 250 τд = 50 | Проверить соотношение амплитуд А3 / А1 ≈ 0,1 Не удовлетворяет условию — уменьшить i на 10 % | |
| 10 | ХP = 125 τи = 250 τд = 40 | Регулятор настроен | |
Двухпозиционный регулятор (ON/OFF)
Двухпозиционный регулятор (ON/OFF) – компаратор – вырабатывает выходную мощность, которая имеет только два значения: минимальное и максимальное. При работе прибора с ИМ типа «нагреватель-холодильник» это следующие значения:
«–1» (–100 %) «холодильник» включен, «нагреватель» выключен;
«0» (0 %) – «нагреватель» и «холодильник» выключены;
«+1» (100 %) – «нагреватель» включен, «холодильник» выключен.
Двухпозиционный регулятор типа «нагреватель» включает «нагреватель» при значениях регулируемой величины, меньших Уставки, и выключает при значениях регулируемой величины, больших Уставки. Двухпозиционный регулятор типа «холодильник» включает «холодильник» при значениях регулируемой величины, больших Уставки, и выключает при значениях регулируемой величины, меньших Уставки. Так работает двухпозиционный регулятор в отсутствие гистерезиса.
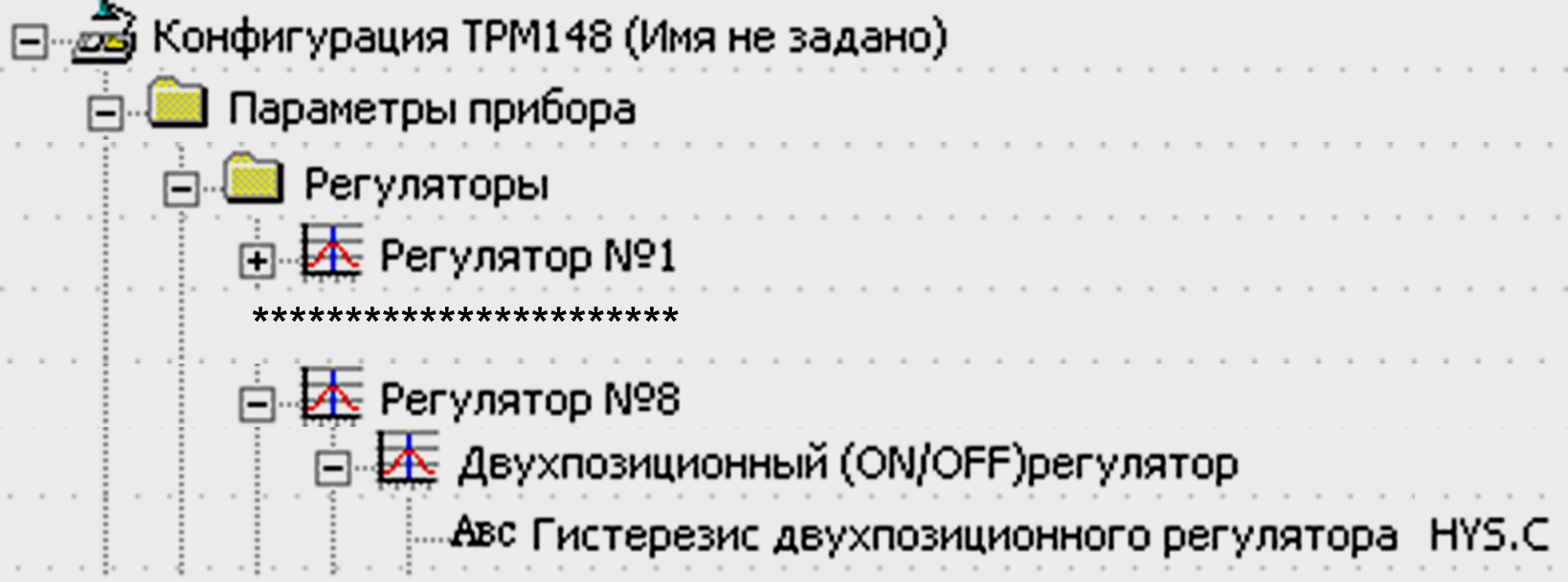
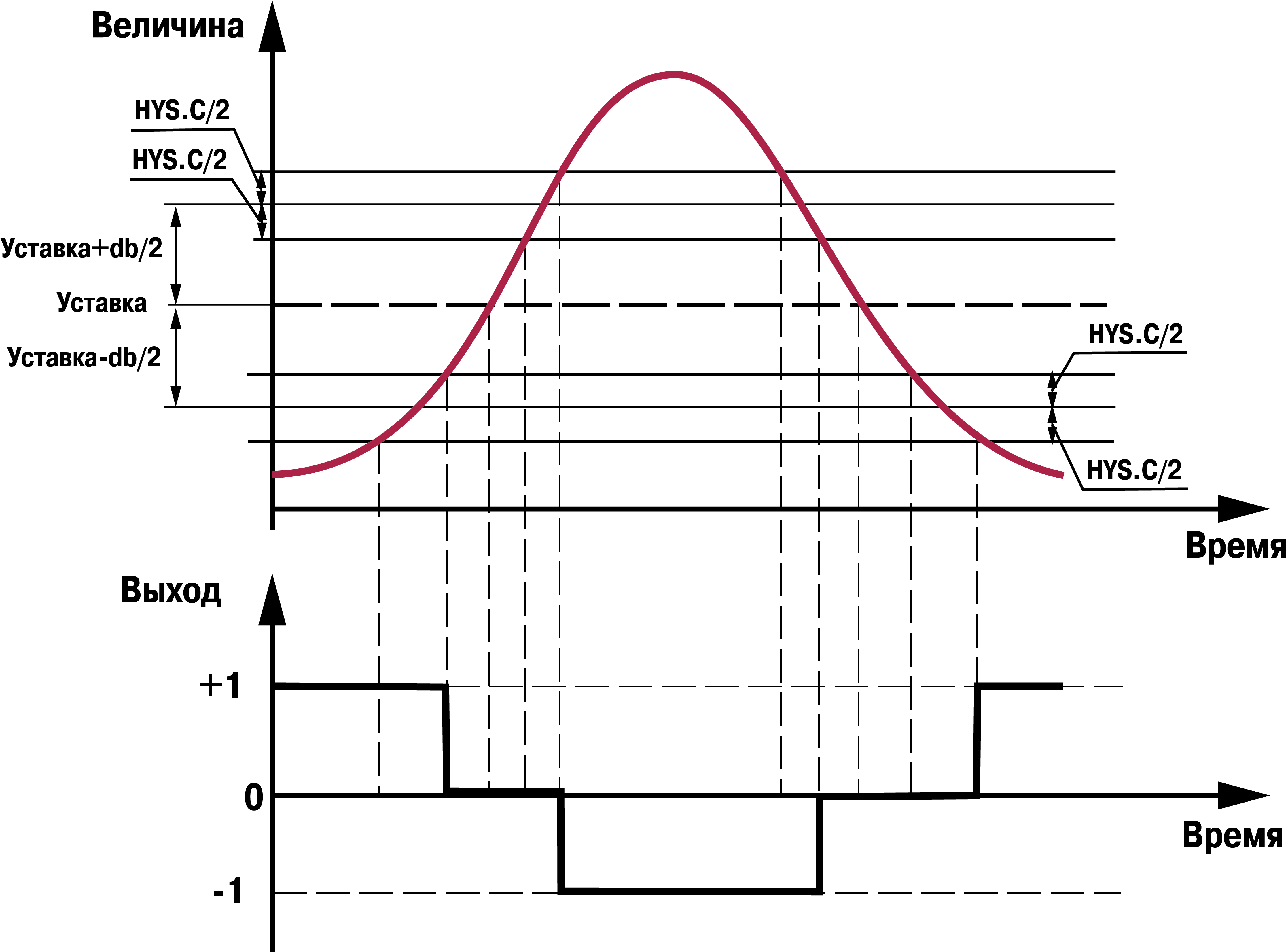
Задается значение Гистерезиса двухпозиционного регулятора HYS.C. Состояние ИМ будет переключаться в тот момент, когда отклонение регулируемой величины от Уставки достигнет половины величины HYS.C (см. рисунок).
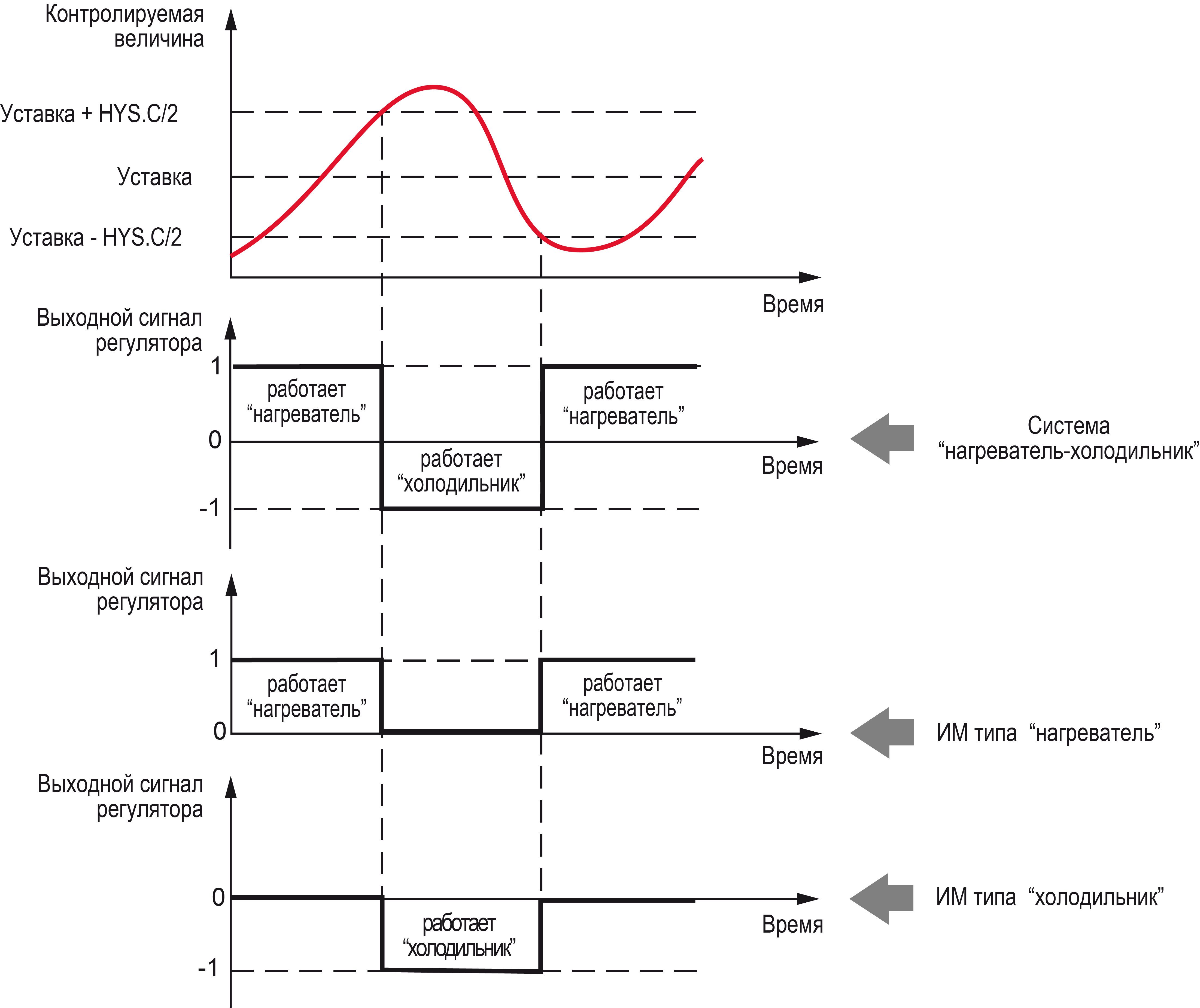
Гистерезис – это зона, в которой происходит отложенное по достигаемому регулируемой величиной уровню переключение регулятора. Пока регулируемая величина находится внутри этой зоны, регулятор не переключается, а сохраняет прежнее состояние, которое было у него до входа в зону гистерезиса.
Гистерезис делится пополам и откладывается от уставки в обе стороны при нулевом значении зоны нечувствительности.
Последние два графика на рисунке приведены для случаев, когда в системе присутствует только один тип ИМ. Один из диапазонов регулирования – отрицательный (при применении «нагревателя») или положительный (при применении «холодильника») – обрезается, и выход прибора становится равным 0. Исключение отрицательной (положительной) зоны производится в ПС.
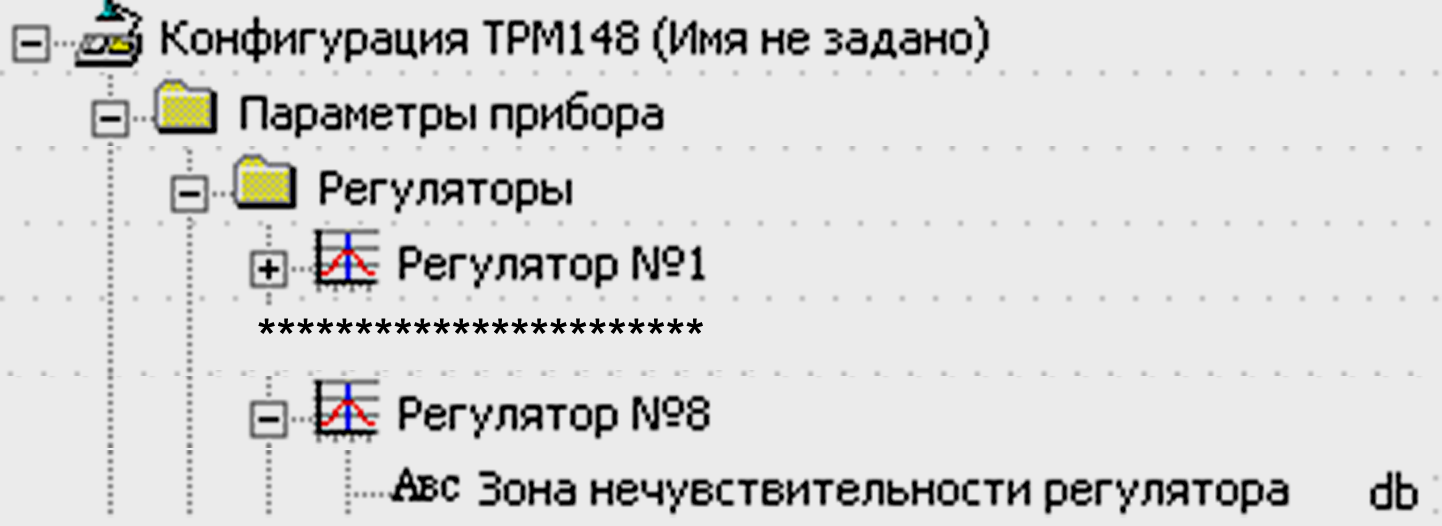
Зона нечувствительности
Зона нечувствительности задается для исключения ненужных срабатываний Регулятора при небольшом отклонении контролируемой величины от Уставки. Прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны.
Зона нечувствительности используется при функционировании как ПИД-регулятора, так и Двухпозиционного регулятора.
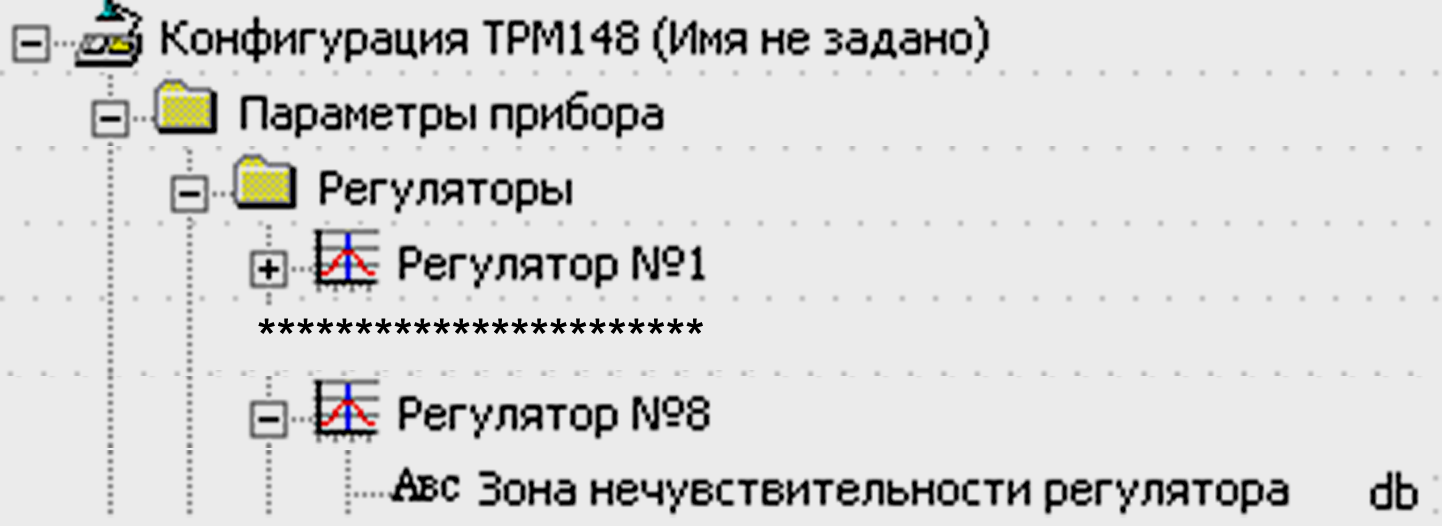
Значение зоны нечувствительности задается параметром db в единицах регулируемой величины.
Пример
Уставка = 60 °С, db = 10 °С. В диапазоне 55…65 °С Регулятор не будет вырабатывать управляющего воздействия.На рисунке представлено использование параметра db при функционировании двухпозиционного регулятора при подключении системы «нагреватель–холодильник».
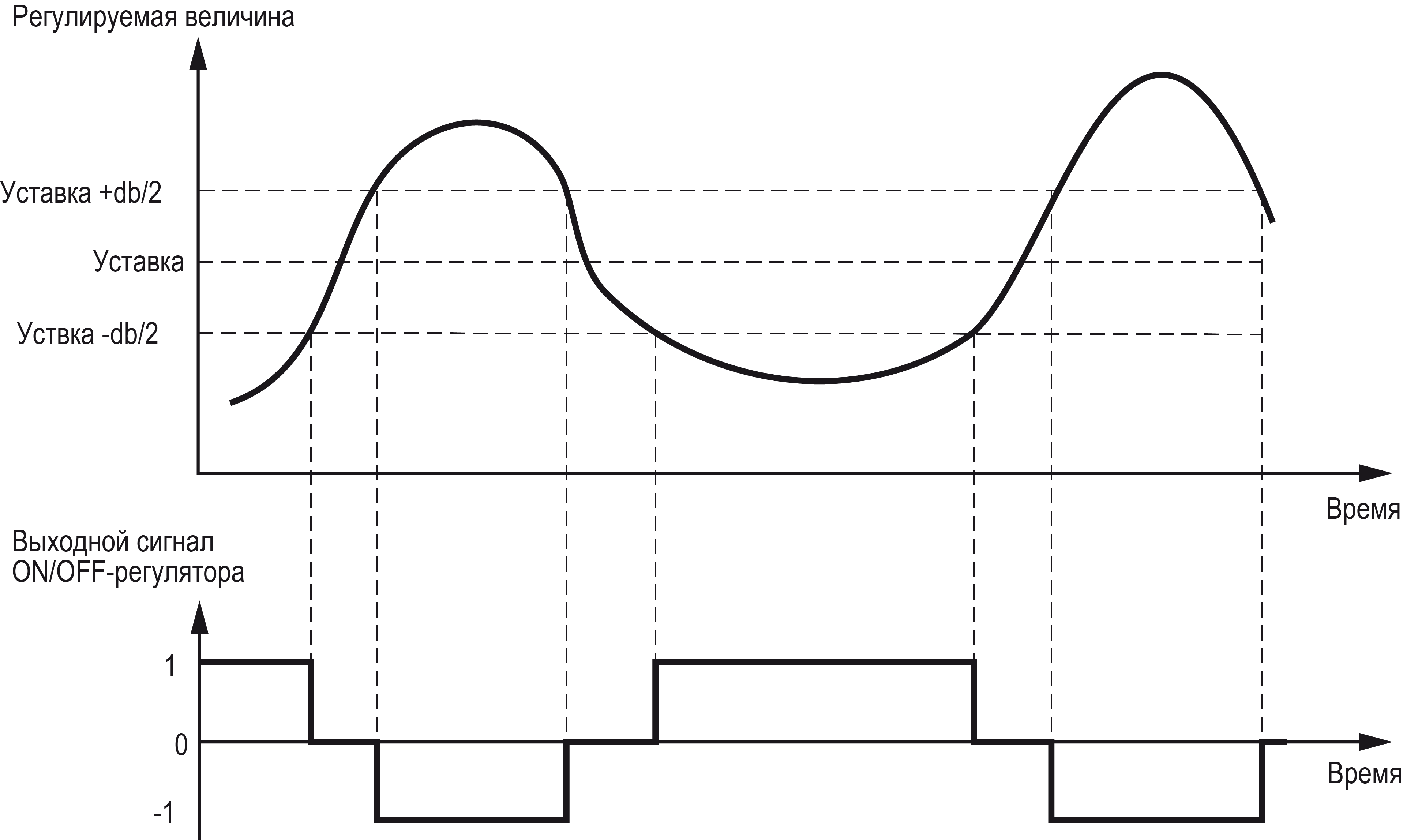
Способ регулирования системы «нагреватель – холодильник» с заданием зоны нечувствительности предотвращает частые переключения ИМ в зоне, близкой к уставке, и не приводит к «раскачиванию» системы регулирования.
Если используется система с одним типом исполнительных механизмов (например, только с «нагревателями»), то более эффективным будет задание не зоны нечувствительности, а гистерезиса.
Работа двухпозиционного регулятора при одновременном учете зоны нечувствительности и гистерезиса проиллюстрирована на рисунке ниже.
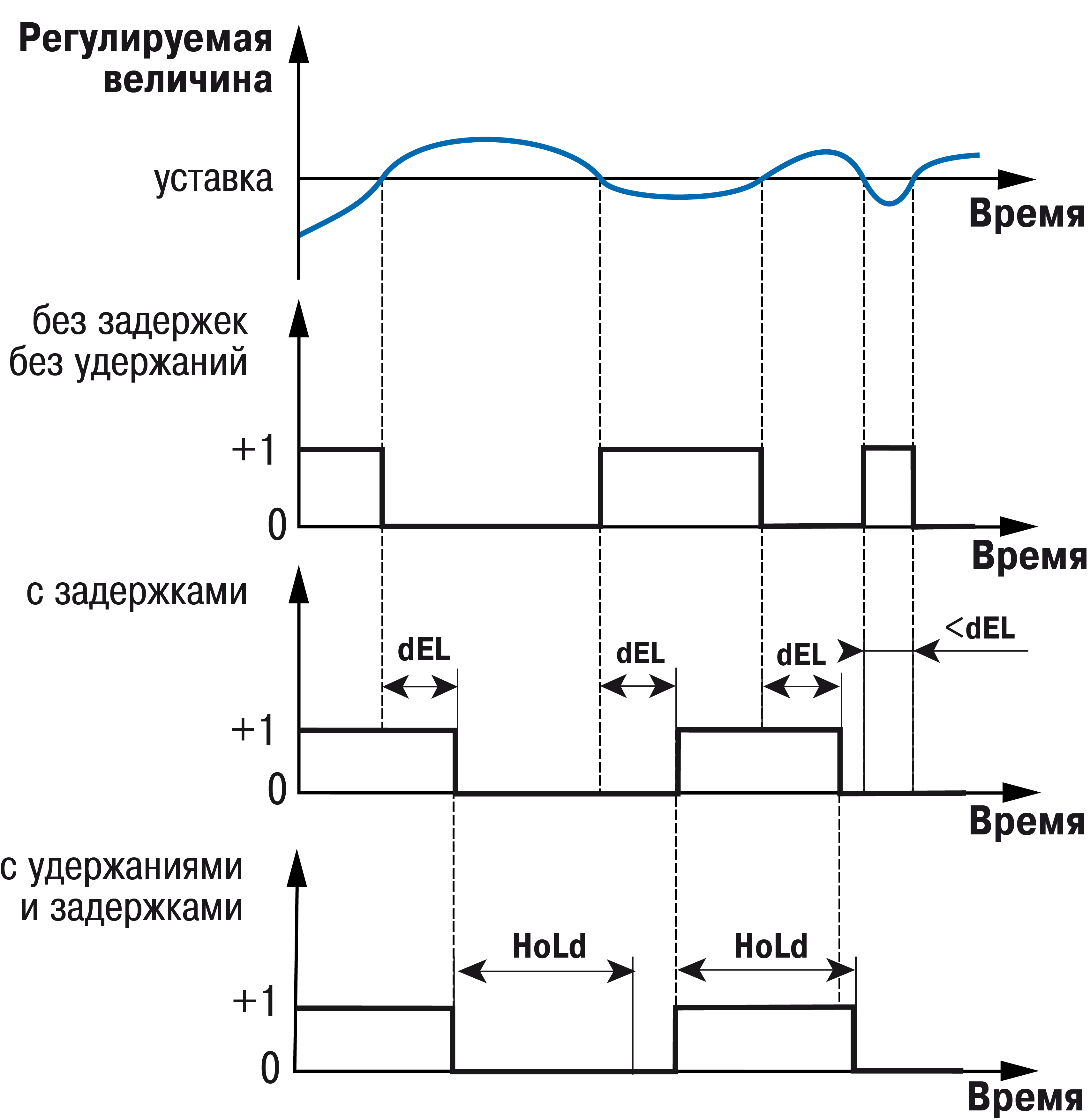
Задержки и удержания
Для двухпозиционного регулятора могут быть заданы задержки переключения, а также минимальные значения времени удержания во включенном и выключенном состоянии.
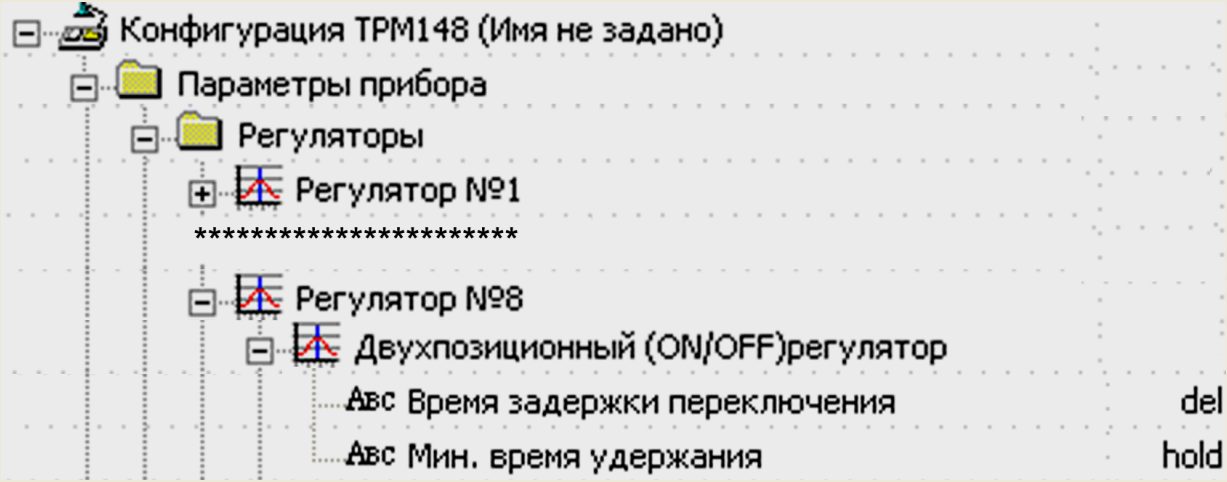
Задержки переключения задаются параметром dEL и служат для задержки во времени переключения выходного сигнала прибора с целью фильтрации кратковременных и ложных срабатываний регулятора и предотвращения пиковых включений исполнительных механизмов.
Время задержки начинает отсчитываться с момента переключения выходного сигнала регулятора, и переключение выходного сигнала прибора блокируется до момента истечения времени задержки. По истечении задержки проверяется состояние регулятора, и если его значение не изменилось, прибор переключает выходной сигнал. Состояние ИМ изменяется. Действие задержки прекращается, если до истечения ее времени произошло еще одно переключение выходного сигнала регулятора.
Удержание во включенном/выключенном состоянии – минимальное время, в течение которого ИМ будет выключен или включен. Реализуется следующим образом: регулятор отсчитывает время от момента происшедшего переключения и блокирует иное переключение, если не прошло требуемое время удержания.
Этот механизм используется для защиты исполнительных механизмов, которые по своим техническим характеристикам не могут запускаться, пока не простояли определенного времени в нерабочем состоянии или тех, которые не могут выключаться, не отработав определенное время.
Удержание отсчитывается после истечения времени задержки (если она была задана) и произведенного переключения состояния.
Удержание задается параметром HoLd.
Функционирование Регулятора с заданными задержками и удержаниями проиллюстрировано на рисунке.
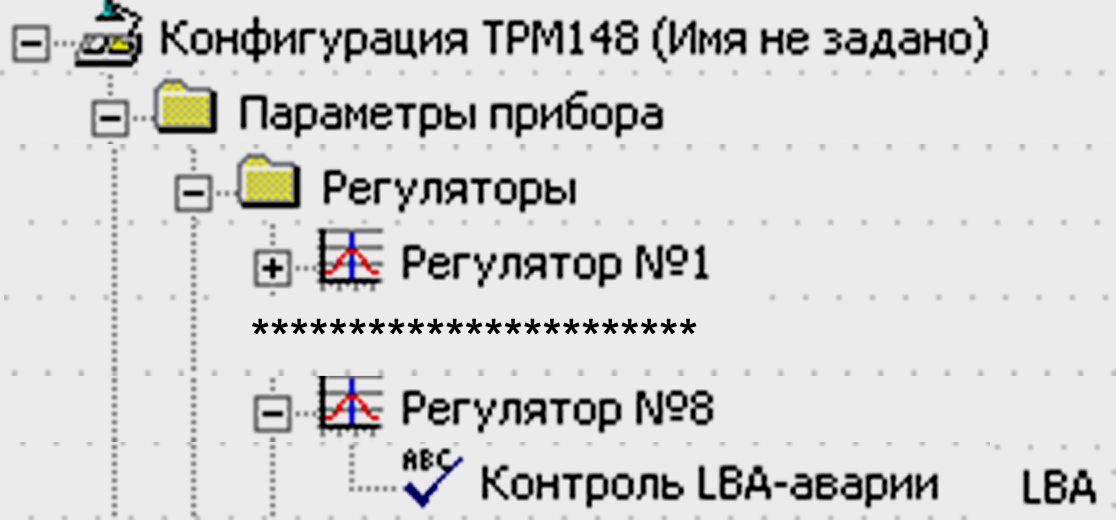
Контроль целостности контура регулирования (LBA-аварии)
У прибора есть режим косвенного контроля исправности ИМ, подключаемого к выходу прибора.
Если исправность датчиков прибор определяет непосредственно по контролю сигнала на своем входе, то исправность ВЭ и ИМ напрямую определить нельзя. Однако можно косвенно определить их исправность, анализируя реакцию объекта регулирования на подачу управляющего воздействия. Если регулируемые параметры объекта не меняются в должных пределах при подаче управляющего воздействия – значит, ИМ неисправен. Такой анализ называется контролем LBA-аварии (Loop Brake Alarm).
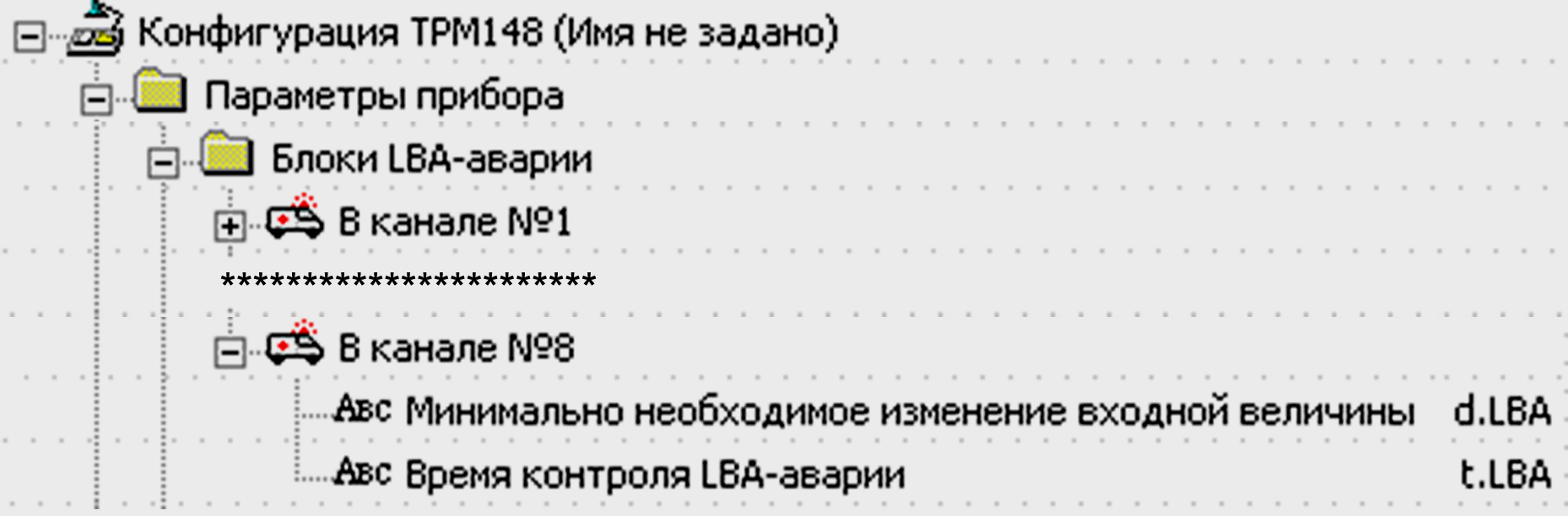
При достижении на ИМ +100 % или –100 % мощности включается отсчет времени, и если за время (параметр t.LBA) регулируемая величина (величина на выходе вычислителя в канале) не изменится на требуемую величину (параметр d.LBA), то прибор реагирует следующим образом – срабатывает программный модуль LBA-авария, переводя объект в состояние АВАРИЯ.
Выходные устройства прибора. Преобразование
Прибор сконструирован с возможностью использования при эксплуатации нескольких вариантов выходных устройств – исполнительных механизмов и встроенных выходных элементов, служащих для управления ими.
Структурная схема Выходного устройства
Выходной сигнал Регулятора подается на Выходное устройство.
Структура Выходного устройства прибора позволяет осуществлять управление сложными ИМ: задвижками, многоступенчатыми нагревателями, системами «нагреватель–холодильник», устройствами с аналоговым управлением и т.д.
Всего в приборе может быть организовано восемь ВУ.
Структурная схема Выходного устройства прибора представлена на рисунке.
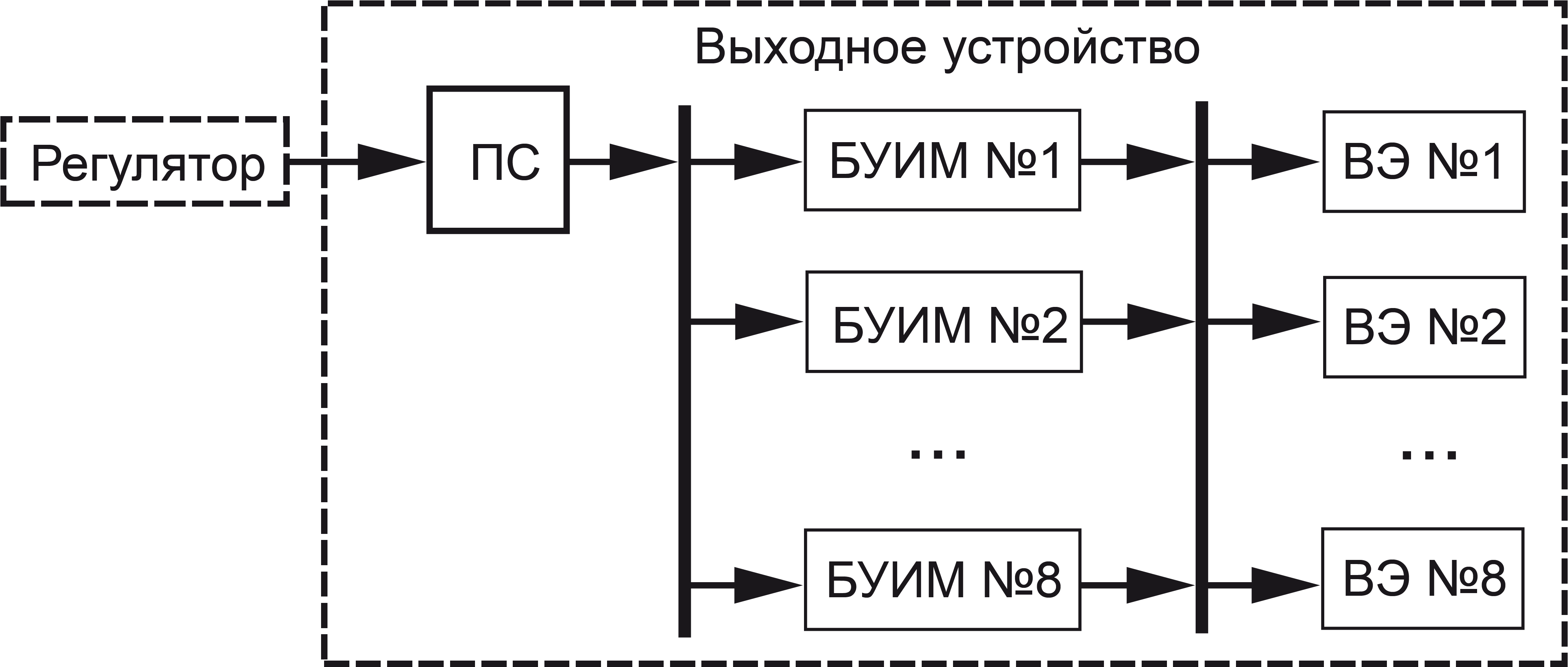
В состав Выходного устройства входят следующие блоки:
преобразователь сигнала;
блоки управления исполнительными механизмами;
выходные элементы.
В состав ВУ прибора может входить до 8 БУИМ и 8 ВЭ.
Один БУИМ может обслуживать несколько ВЭ.
Общее количество ВЭ в приборе не может быть больше восьми.
Общее количество БУИМ в приборе не может быть больше восьми.
Преобразователь сигнала
ПС выполняет две основные функции: ограничение выходного сигнала Регулятора и его распределение.
Задание диапазона выходного сигнала
При типе «значение» уставки в канале (параметр P.-SP) следует определить диапазон изменения величины выходного сигнала Регулятора. Диапазон задается двумя параметрами: максимальное значение P.UPr и минимальное P.min, которые определяются рабочим диапазоном ИМ. Эти параметры задаются в процентах от максимальной мощности, которую можно подать на ИМ. Если Регулятор выдает значение мощности, находящееся за пределами заданного диапазона, то оно принимается равным P.UPr или P.min, соответственно.
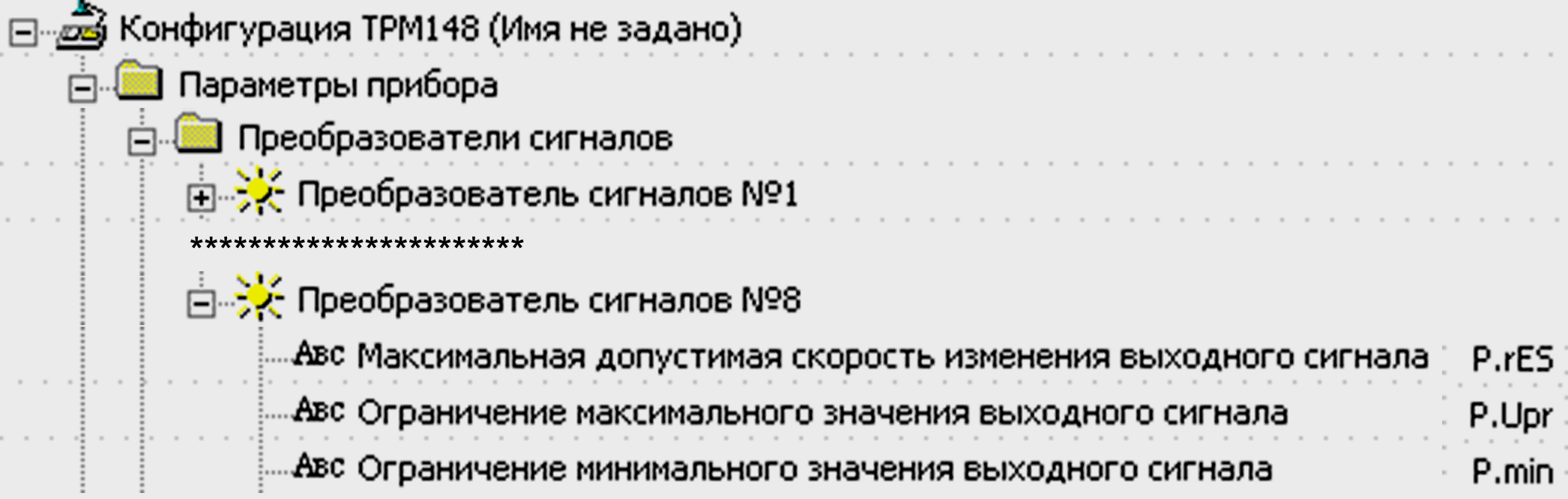
Для безударного включения ИМ следует ограничить скорость роста выходного сигнала Регулятора. Максимальная скорость изменения выходного сигнала задается параметром P.rES в %/мин.
Пример
При использовании только «нагревателя» следует установить ограничение от 0 до 100 %. То есть установить P.min «0».Пример
В климатокамере нельзя допустить, чтобы нагреватель работал менее чем на 20 % своей мощности. Для выполнения этого условия нужно установить Минимальную выходную мощность P.min «20.0».Распределение выходного сигнала
ПС распределяет выходной сигнал по БУИМ. Всего к ПС может быть подключено до восьми БУИМ.
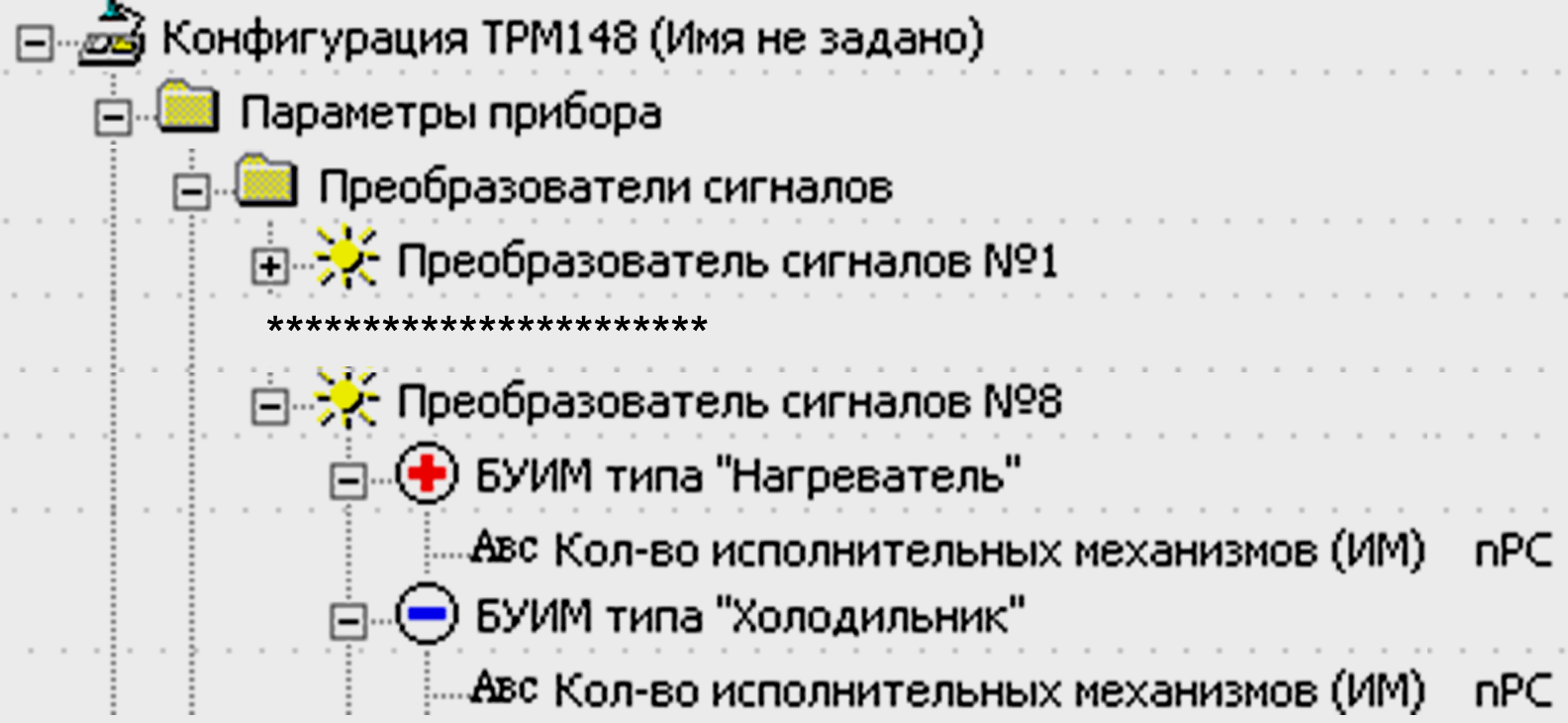
БУИМ подключается в параметре nPC, в котором нужно указать количество подключаемых БУИМ. После задания значения nPC для «нагревателей» к ПС будет подключено соответствующее количество «нагревателей», при задании значения nPC для «холодильников» к ПС будет подключено соответствующее количество холодильников. Допускается подключать к одному ПС одновременно «нагреватели» и «холодильники», но их суммарное количество не должно превышать восьми.
Блок управления исполнительными механизмами
Для каждого ИМ, которым управляет прибор, используется свой БУИМ. Преобразованный сигнал управления ИМ передается на ВЭ, подключенные к БУИМ.
Для БУИМ задаются следующие основные параметры:
тип ИМ;
номер (номера) ВЭ для подключения ИМ;
диапазон сигнала, поступающего с ПС, в котором работает ИМ;
рабочие характеристики для трехпозиционных ИМ.
Типы ИМ и количество ВЭ
Прибор управляет ИМ двух типов:
двухпозиционным или ИМ с аналоговым управлением (ТЭН, клапаном и т. д., а также ИМ, управляемым унифицированным сигналом тока 4..20 мА или напряжения 0...10 В). Для управления таким ИМ используется один ВЭ;
трехпозиционным ИМ (задвижкой). Трехпозиционныq ИМ управляется сигналами типа «больше/меньше/стоп». Прибор использует два ВЭ: один дает команду на открытие («больше»), другой – на закрытие («меньше»). Подробно об управлении трехпозиционным ИМ.
Тип ИМ задается параметром SE.P.
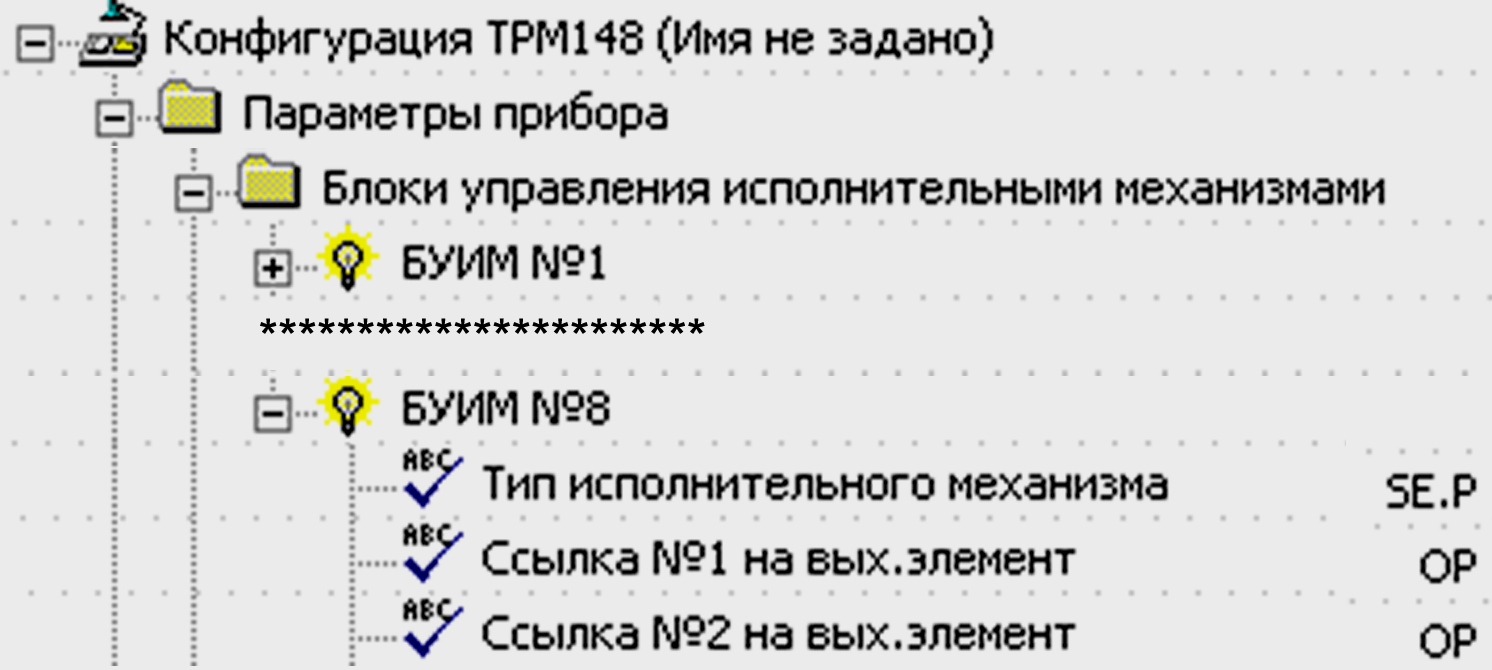
ВЭ для управления ИМ назначаются параметром OP. Первый ВЭ соответствует открытию задвижки, второй ВЭ - ее закрытию.
ИМ (как двухпозиционные с аналоговым управлением, так и трехпозиционные) по характеру управляющего воздействия на Объект могут быть двух типов:
«Нагреватели» – ИМ, увеличивающие значение регулируемой величины. Для управления «нагревателями» предназначен положительный диапазон выходного сигнала Регулятора (от 0 до +1).
«Холодильники» – ИМ, уменьшающие значение регулируемой величины. Для управления «холодильниками» предназначен отрицательный диапазон выходного сигнала Регулятора (от –1 до 0).
Тип ИМ определяется при подключении БУИМ к ПС.
Система ИМ «нагреватель–холодильник» содержит по одному или несколько ИМ обоих типов.
При подключении одного БУИМ повторитель сигнала (ПС) будет работать во всем диапазоне выходного сигнала от регулятора (0…1 или – 1…0, для нагревателя и холодильника соответственно).
При управлении системами БУИМ рабочий диапазон конкретного БУИМ определяется заданием значений порогов.
Управление двухпозиционными ИМ
Двухпозиционный ИМ имеет два положения: «вкл.» и «выкл.». Для управления таким ИМ используется один дискретный ВЭ (реле, ключ, симистор), на который выдается ШИМ-сигнал.
В качестве двухпозиционного ИМ используется ИМ с аналоговым управлением. Для этого в приборе применяется ВЭ аналогового типа – ЦАП 4...20 мА или ЦАП 0...10 В.
Аналоговое управление осуществляется по прямо-пропорциональному закону (т. е. 4 мА или 0 В соответствует минимальной мощности ИМ, а 20 мА или 10 В соответствует максимальной мощности ИМ).
Аналоговый сигнал и скважность ШИМ пропорциональны значению выходного сигнала, пришедшего от ПС.
Номер ВЭ, к которому подключается двухпозиционный ИМ, задается параметром ОР.
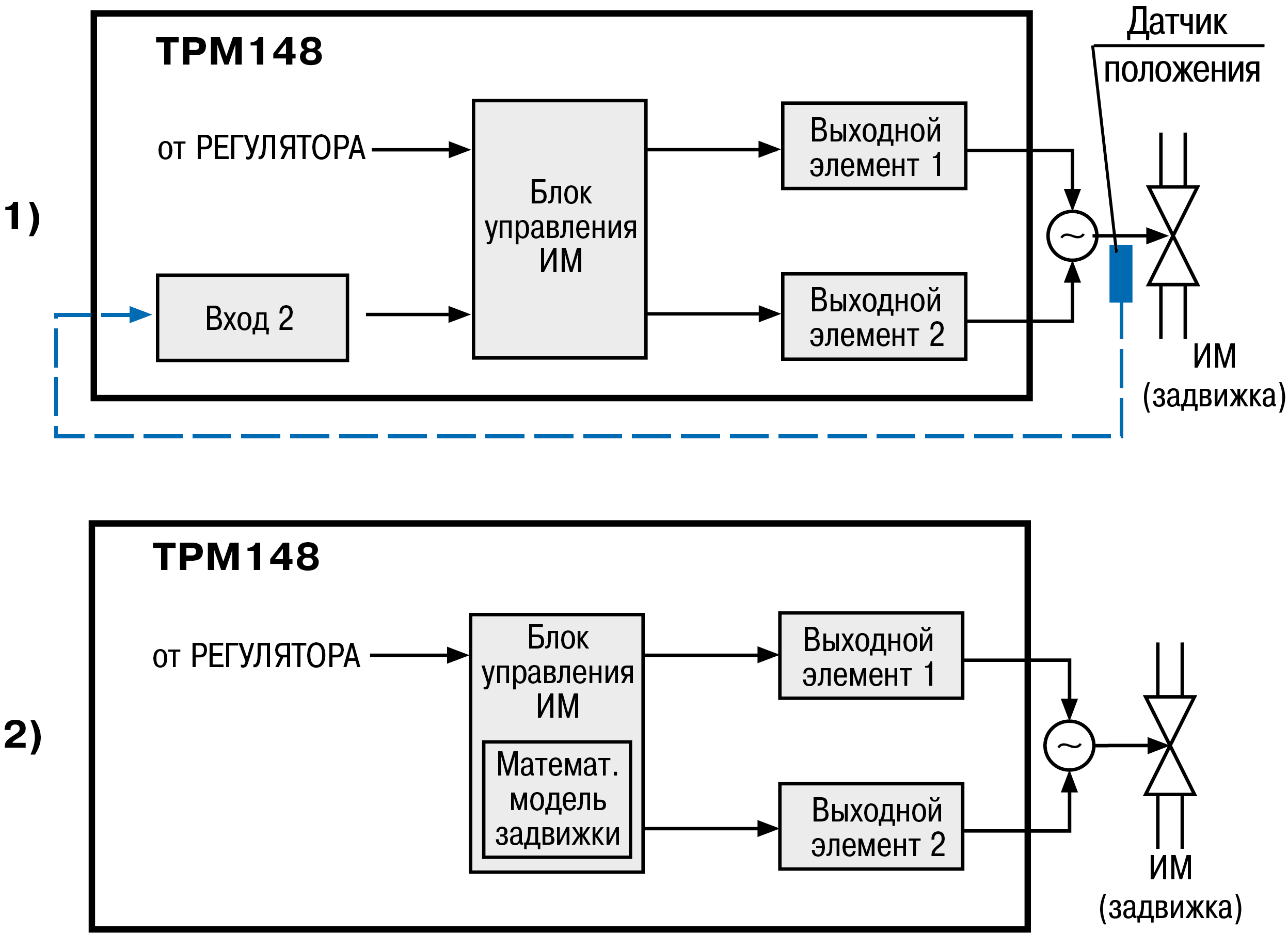
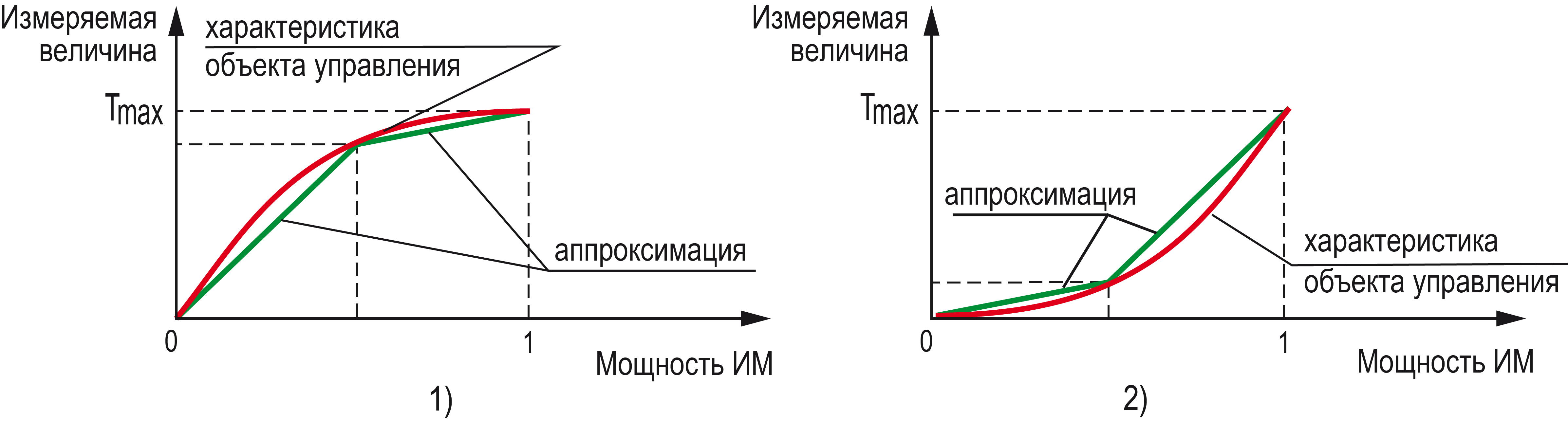
Управление трехпозиционным ИМ (задвижкой)
Трехпозиционный ИМ имеет три управляющих сигнала: «больше», «меньше», «стоп». Для управления таким ИМ нужно два ВЭ.
Прибор ТРМ148 управляет трехпозиционными ИМ с датчиком положения или без него.
Работа с датчиком положения ИМ проиллюстрирована на рисунке , (1).
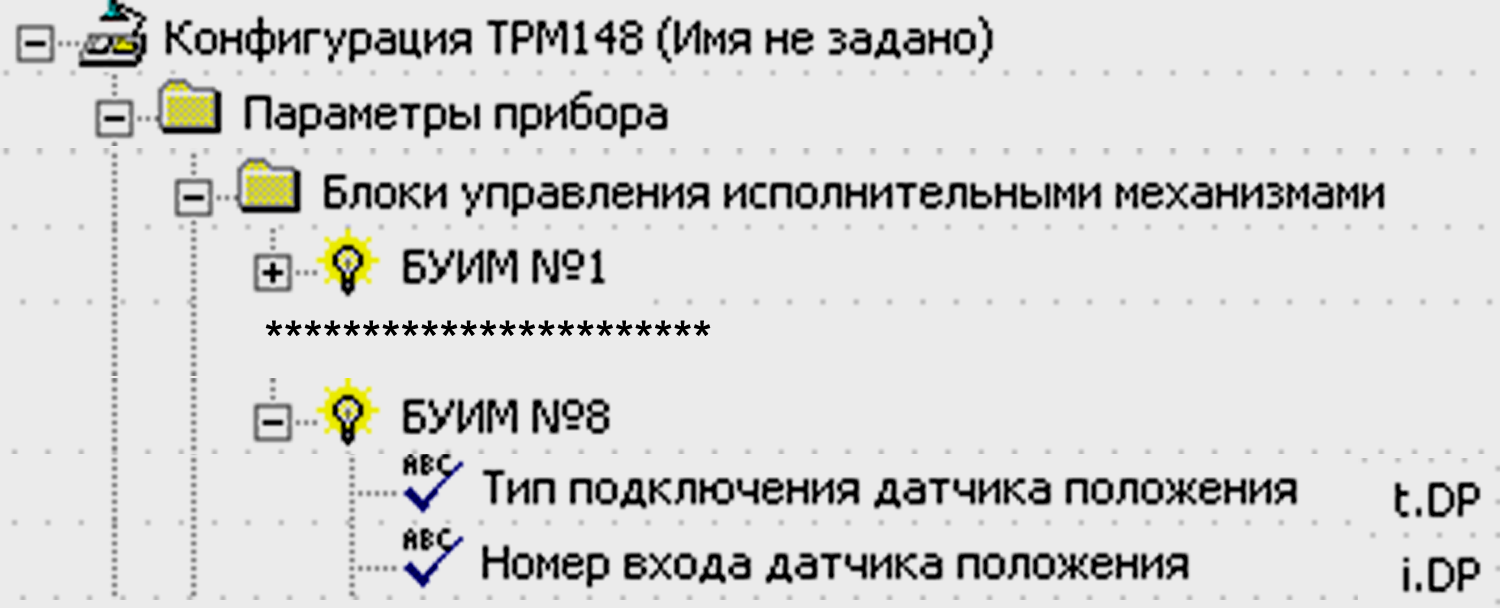
Прибор работает с датчиками положения ИМ двух типов: резистивными или токовыми.
Датчик положения ИМ подключается к входу прибора.
Источник данных о положении ИМ задается параметром t.DP, номер входа – параметром i.DP.
Работа без датчика положения ИМ проиллюстрирована на рисунке, (2).
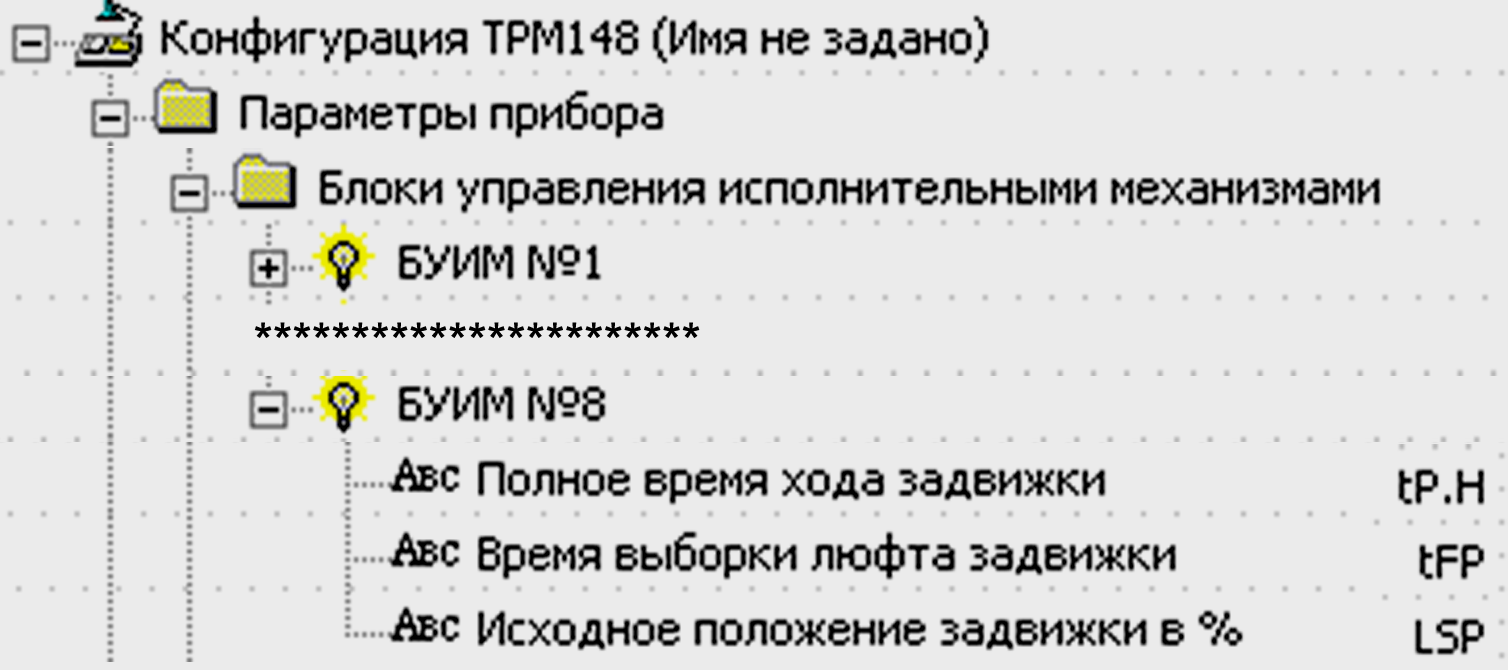
Положение ИМ вычисляется по математической модели. Для того чтобы математическая модель в большей степени соответствовала реальности, следует как можно точнее задать параметры реального ИМ:
полное время хода ИМ (параметр tP.H);
начальное положение ИМ (параметр LSP);
время выборки люфта (параметр tFP).
Прибор по этим данным вычисляет текущее положение задвижки в любой момент времени.
Следует учитывать, что управление задвижкой без датчика положения менее точно и приводит к накоплению ошибки.
Системы ИМ
Прибор может управлять системами из нескольких ИМ. Системой исполнительных механизмов называется группа ИМ, которая управляется одним сигналом от одного Регулятора. Для управления системой ИМ требуется один Преобразователь Сигнала и два или более БУИМ.
Примеры систем ИМ, которыми может управлять прибор:
система из максимум восьми «нагревателей»;
система из максимум восьми «холодильников»;
системы «нагреватель – холодильник»;
система управления трехпозиционными ИМ (задвижками);
система из двух— и трехпозиционных механизмов в различных комбинациях.
Всего в приборе можно организовать до 8 систем ИМ, что соответствует числу ПС в приборе.
Для управления системой ИМ к ПС следует подключить столько БУИМ, сколькими ИМ следует управлять в системе. При подключении БУИМ к ПС следует учитывать тип ИМ («нагреватель» или «холодильник»). Количества «холодильников» и «нагревателей» задаются параметром nPC, соответственно в папках параметров «БУИМ типа «нагреватель» и БУИМ типа «холодильник».
Задание диапазонов выходного сигнала при управлении системами ИМ
При управлении системами ИМ с помощью нескольких БУИМ для каждого из БУИМ задаются свои пороги. Диапазон сигнала от Регулятора (от –1 до +1) делят на несколько поддиапазонов, соответствующих количеству ИМ. БУИМ анализирует прошедший через ПС сигнал и, при попадании его в назначенный диапазон, включает ИМ.
При нахождении сигнала вне диапазона (ниже нижнего значения), назначенного для конкретного ИМ, этот ИМ не функционирует. Как только сигнал попадает в заданный диапазон, БУИМ реагирует и конкретный ИМ начинает функционировать. При нахождении значения сигнала в рамках диапазона, ИМ работает с неполной мощностью. Чем ближе значение входного сигнала к верхней границе диапазона, тем выше мощность ИМ, и, соответственно, чем ближе значение входного сигнал к нижней границе, тем ниже мощность ИМ. При переходе значения выходного сигнала в диапазон последующего ИМ Исполнительный механизм выходит на стопроцентную мощность. При переходе значения выходного сигнала в диапазон предыдущего ИМ Исполнительный механизм прекращает работать.
На рисунке представлен график работы ИМ (тип «нагреватель») в заданном диапазоне.
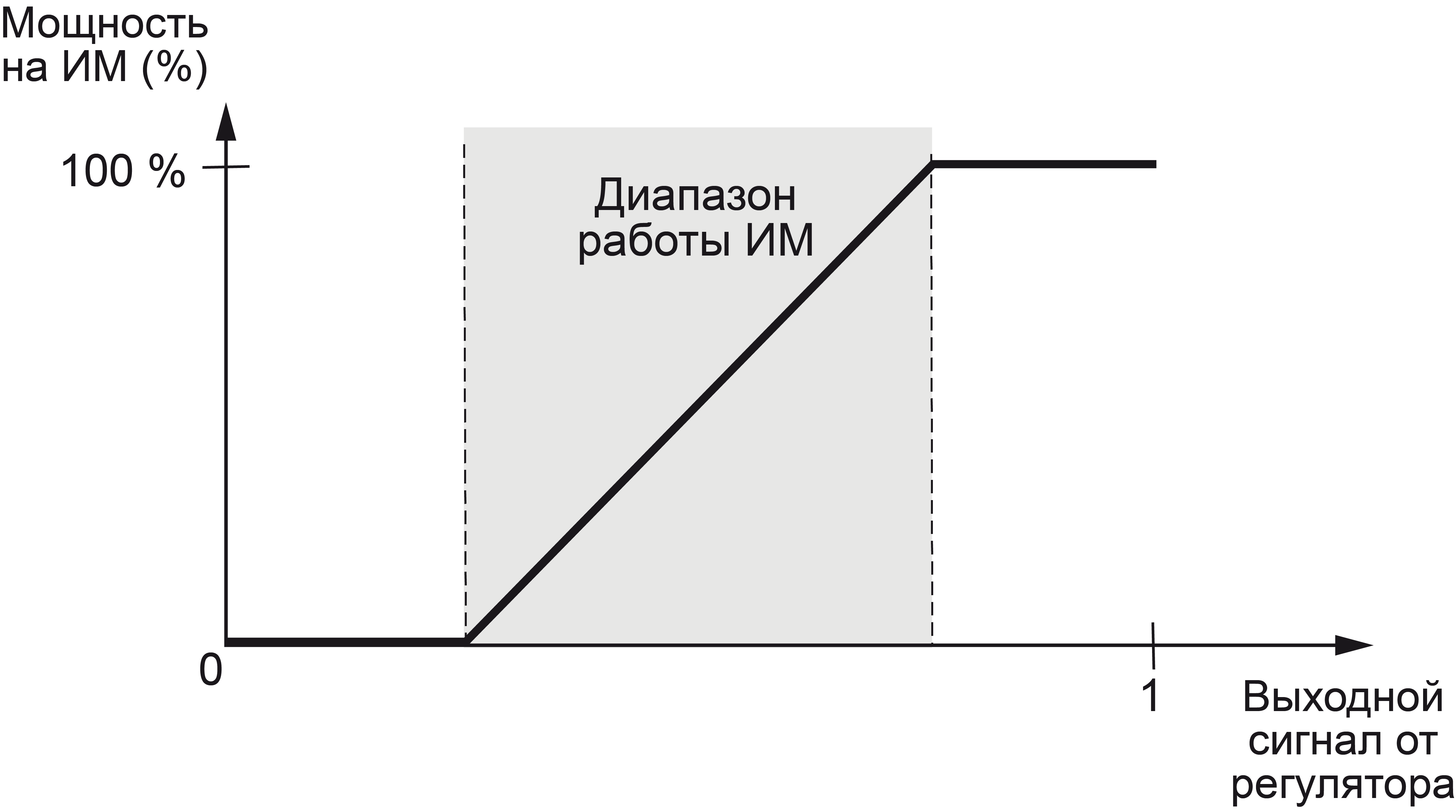
Для каждого БУИМ задается только нижний порог – минимальное значение выходного сигнала Регулятора, которое включает ИМ, соответствующий данному БУИМ. Нижний порог задается параметром PCP.
Верхний порог не задается ввиду следующего:
верхний порог предыдущего БУИМ всегда соответствует нижнему порогу последующего БУИМ;
верхний порог последнего БУИМ типа «нагреватель» всегда равен +1;
верхний порог (определяется по модулю) последнего БУИМ типа «холодильник» всегда равен –1.
Ниже представлены два примера управления системами ИМ с помощью нескольких БУИМ.
Пример
Для обогрева большого складского помещения используются 4 ТЭН мощностью 10 кВт каждый. В зависимости от сигнала с регулятора температуры прибор должен поочередно включать ТЭН, чтобы достичь суммарной мощности в 40 кВт.
Система функционирует следующим образом.
К одному ПС подключают 4 БУИМ, каждый из которых управляет одним ТЭН. Сигнал от регулятора изменяется в диапазоне от 0 до 1, его следует разбить на 4 диапазона для четырех ТЭН.
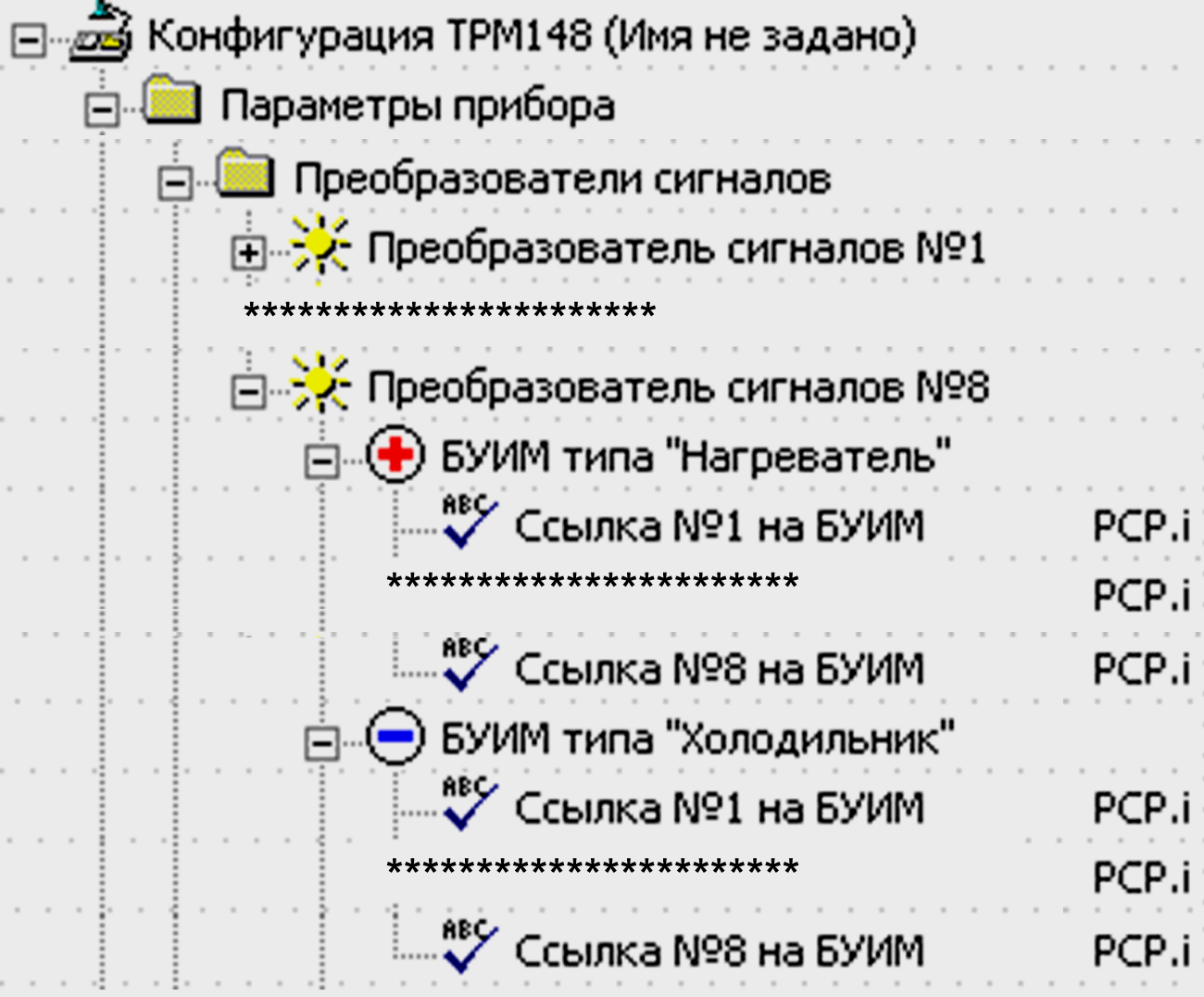
В параметре PCP БУИМ № 1 указывают значение 0,00, БУИМ № 2 – 0,25, БУИМ № 3 – 0,50 и БУИМ № 4 – 0,75 (см. рисунок).
Теперь весь диапазон сигнала от 0 до 1 разделен на 4 равных поддиапазона, и каждый ИМ будет работать в своем поддиапазоне. При таком способе управления ИМ обеспечивается плавный рост суммарной мощности системы без перенагрузки коммутационных элементов системы управления (реле или пускателей).
Пример
Управление системой «нагреватель – холодильник»
Для поддержания температуры прибор может использовать одновременно ТЭН и охладитель.Диапазон выходного сигнала Регулятора распределяется для двух БУИМ: один БУИМ типа «нагреватель» и один БУИМ типа «холодильник» (см. рисунок). Устанавливается нижний порог первого БУИМ +0,1, нижний порог второго БУИМ –0,1. При положительных значениях выходного сигнала будет работать ТЭН, а при отрицательных – охладитель.
В диапазоне выходного сигнала от –0,1 до +0,1 не будет работать ни один ИМ. Это позволит избежать частых переключений между «нагревателем» и «холодильником» при работе в диапазоне выходного сигнала Регулятора, близком к нулю
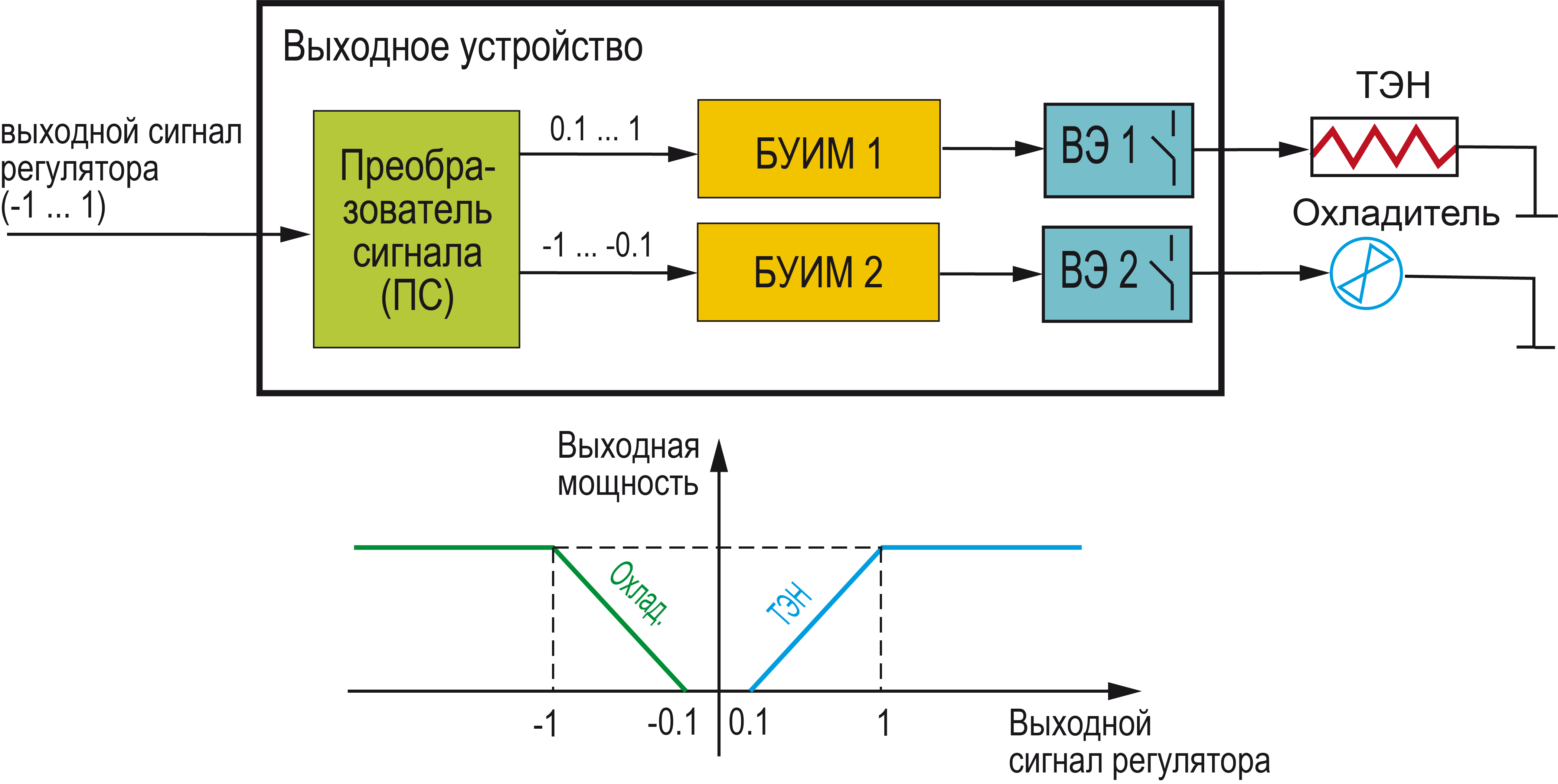
На рисунке представлены блок-схема выходного устройства и график изменения выходной мощности в зависимости от изменения выходного сигнала Регулятора в варианте управления Объектом с помощью системы «нагреватель – холодильник».
Управление Объектами с нелинейной характеристикой с помощью БУИМ
С помощью прибора возможно регулирование параметров Объектов, имеющих нелинейную характеристику. Примерами таких Объектов являются трубопровод с утечкой или печь с поврежденной теплоизоляцией.
Нелинейная характеристика может быть представлена кусочно-линейной функцией (ломаной линией), состоящей из максимально восемь(по количеству БУИМ) участков, каждый из которых имеет свой угол наклона.
Примеры такой аппроксимации представлены на рисунке, где приведены варианты использования двух БУИМ, с двумя участками регулирования и разным наклоном.
Объектами с нелинейными характеристиками можно управлять с помощью созданной в ТРМ148 системы ИМ. Каждому БУИМ, входящему в систему, соответствует свой участок, а точка перегиба задается нижним порогом последующего БУИМ.
Управление в соответствии с кусочно-линейной характеристикой эффективно повышает устойчивость системы управления, уменьшая перерегулирование переходных процессов.
Пример
Управление Объектом (печью) с нелинейной характеристикой с помощью двухступенчатого «нагревателя»
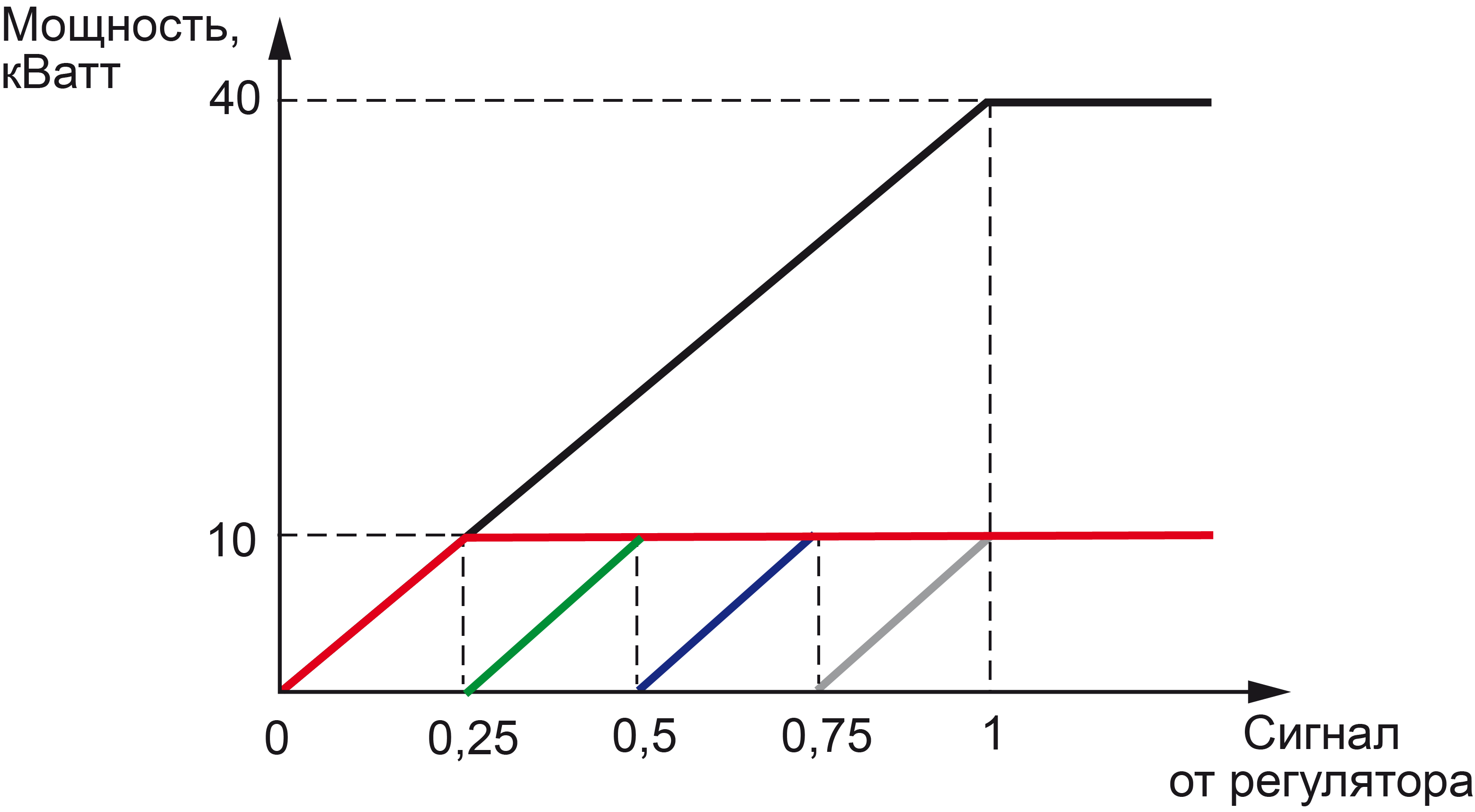
Имеется печь, в которой повреждена теплоизоляция. Это Объект с нелинейной характеристикой вида, приведенного на рисунке. Для поддержания в этой печи температуры до 50 °С требуется ТЭН мощностью 20 кВт. Для поддержания температуры выше 50 °С с учетом возросших утечек тепла требуется дополнительно подключать еще один ТЭН, но уже мощностью 10 кВт. Для решения этой задачи выходной сигнал Регулятора разбивается на два положительных БУИМ (см. рисунок). Нижний порог первого БУИМ устанавливается равным 0. Нижний порог PCP второго БУИМ соответствует точке перегиба (например, 0,65). Тогда при значениях выходного сигнала от 0 до PCP будет работать только первый ТЭН, а при значениях от PCP до 1 включатся оба ТЭН.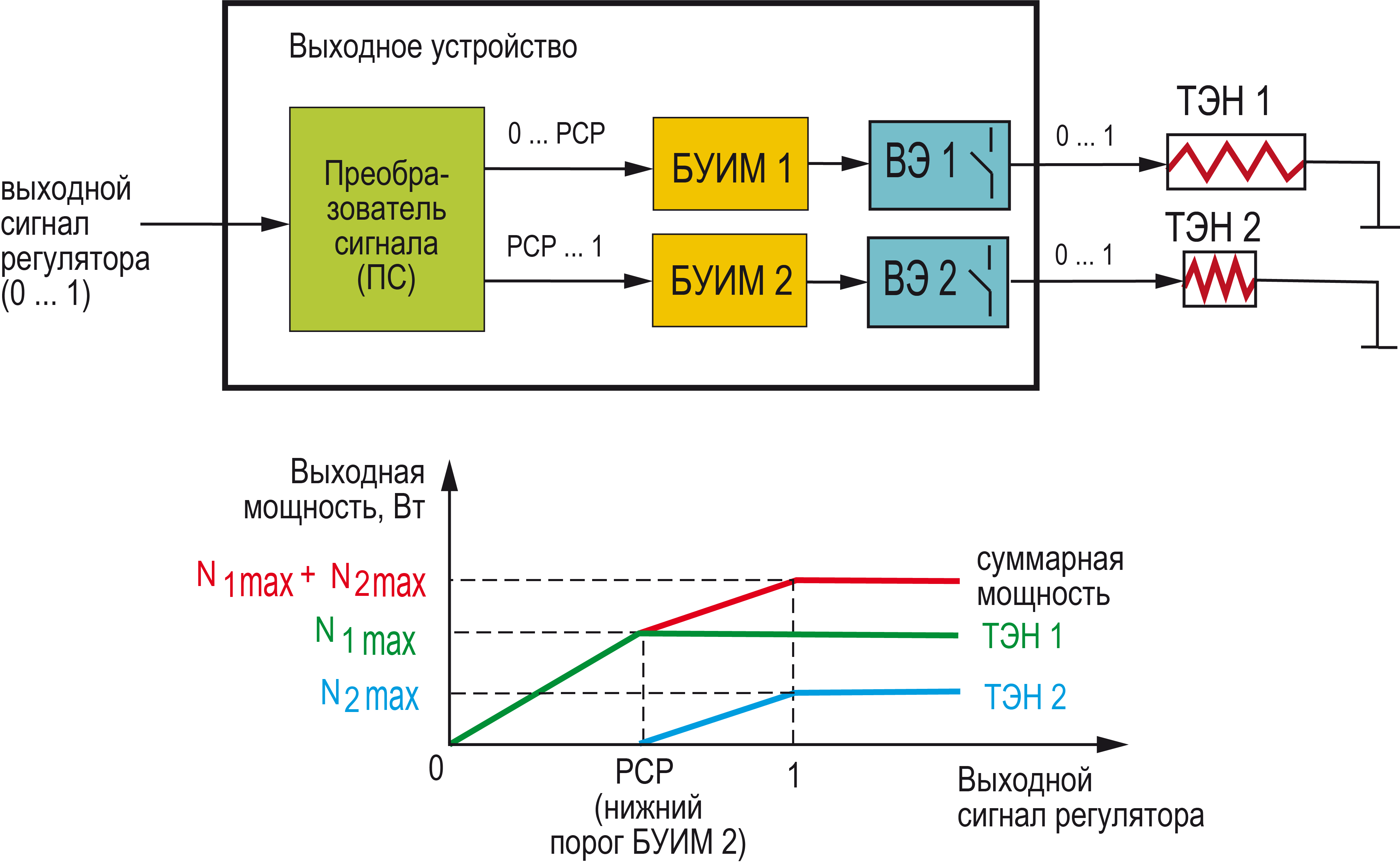
На рисунке представлены блок-схема выходного устройства и график изменения выходной мощности в зависимости от изменения мощности сигнала Регулятора в варианте управления Объектом с нелинейной характеристикой с помощью двухступенчатого «нагревателя».
Выходные элементы
Прибор имеет 8 встроенных ВЭ, каждый из которых программно привязан к соответствующему БУИМ, Инспектору, Регистратору или реле аварии.
Выходной элемент может быть двух типов:
дискретный (электромагнитное реле, транзисторная или симисторная оптопара, выход для управления твердотельным реле );
аналоговый (ЦАП «параметр – ток 4...20 мА» или «параметр – напряжение 0...10 В).
Использование дискретных ВЭ при ПИД-регулировании
При выборе Режима работы регулятора ПИД-регулятор, дискретный ВЭ будет работать в режиме ШИМ. Следует задать период следования ШИМ-импульсов (параметр tHP) и минимальную длительность импульса (параметр t.L), при которой еще производится включение ВЭ (см. рисунок).
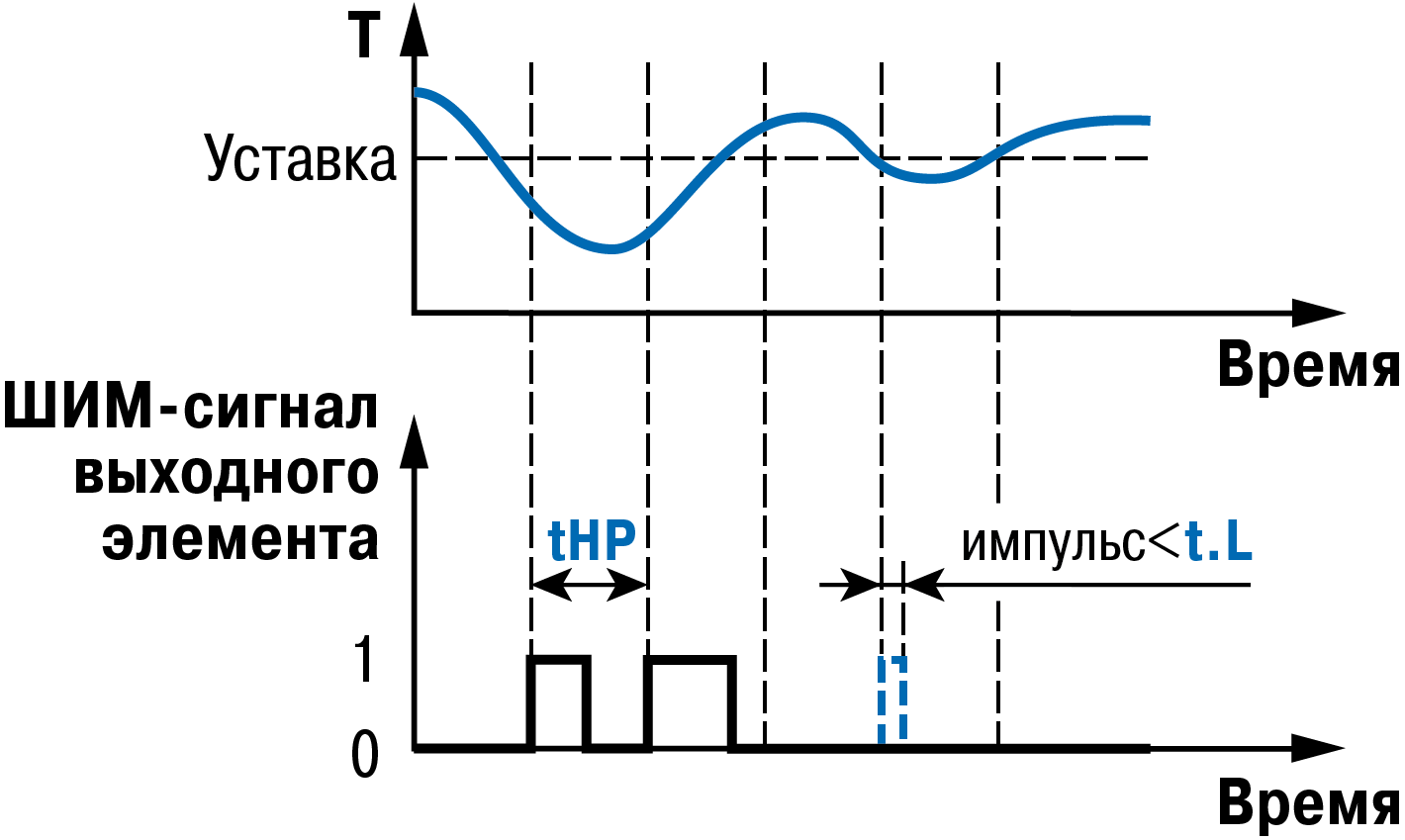
Чем выше частота управляющих импульсов (т. е. меньше период tHP), тем точнее реакция Регулятора на внешние изменения.
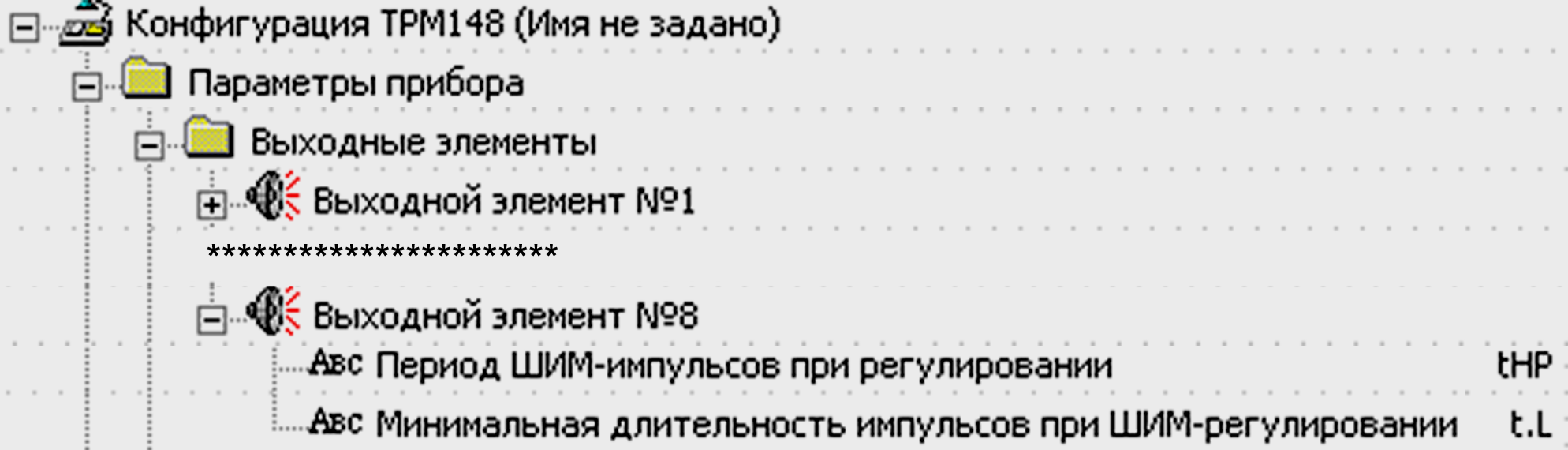
Если ВЭ – транзисторная или симисторная оптопара, то период следования импульсов можно установить равным 1 с. Если ВЭ – э/м реле, то слишком малое значение периода tHP приведет к частым переключениям и быстрому износу силовых контактов. Поэтому следует задать большее значение параметра tHP, но следует понимать, что это может ухудшить качество регулирования.
Задание минимальной допускаемой длительности импульса t.L также следует для предотвращения износа силовых контактов ВЭ вследствие слишком кратковременных включений.
Инспектор
Инспектор – программный модуль, контролирующий нахождение регулируемой величины в допустимых границах. Выход Инспектора может быть подключен:
к логике принятия решения об аварии и тогда он будет выдавать сигнал об аварии
;непосредственно к ВЭ, обеспечивающему изменение контролируемой величины
.
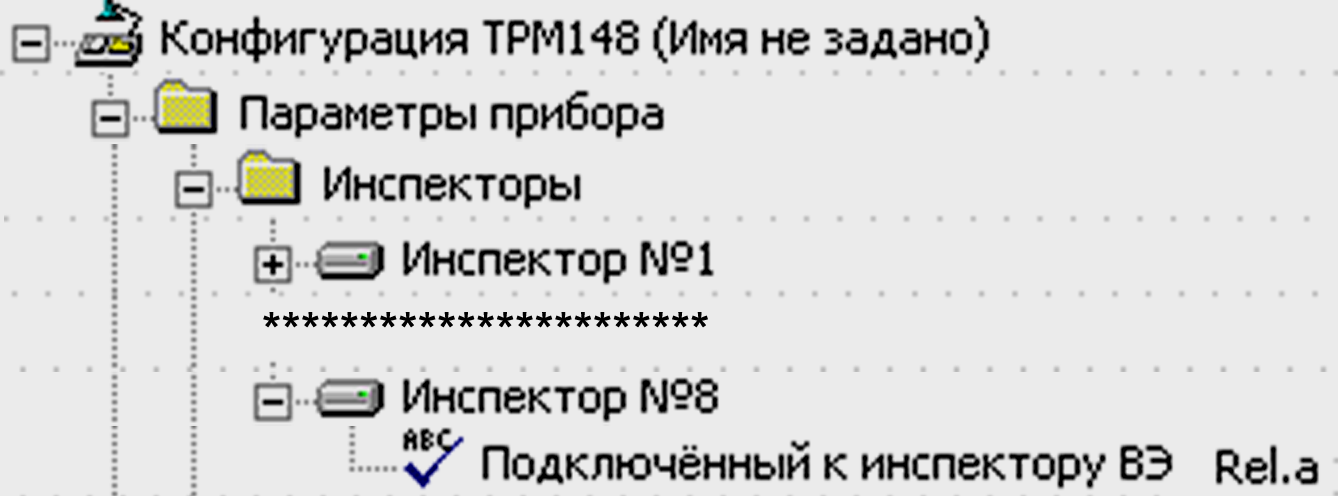
В варианте конфигурации прибора, в котором к инспектору не подключен выходной элемент (параметр rel.a в каждом инспекторе указывает на подключение или отключение ВЭ от инспектора), при срабатывании Инспектора формируется сигнал на перевод объекта в состояние АВАРИЯ в соответствии с логикой принятия решения об аварии.
Во втором случае (при подключении Инспектора к ВЭ) сигнал аварии не формируется.
Включение Инспектора задается параметром inSP.
Для Инспектора задаются следующие параметры для каждого объекта:
пороги срабатывания Инспектора и способ их отсчета;
тип логики срабатывания Инспектора;
использование Инспектора в каждом состоянии;
блокировки срабатывания при определенных условиях;
задержки срабатывания.
Отключение Инспектора
Инспектор можно отключить:
для всего объекта, установив значение параметра inSP «Выключен»;
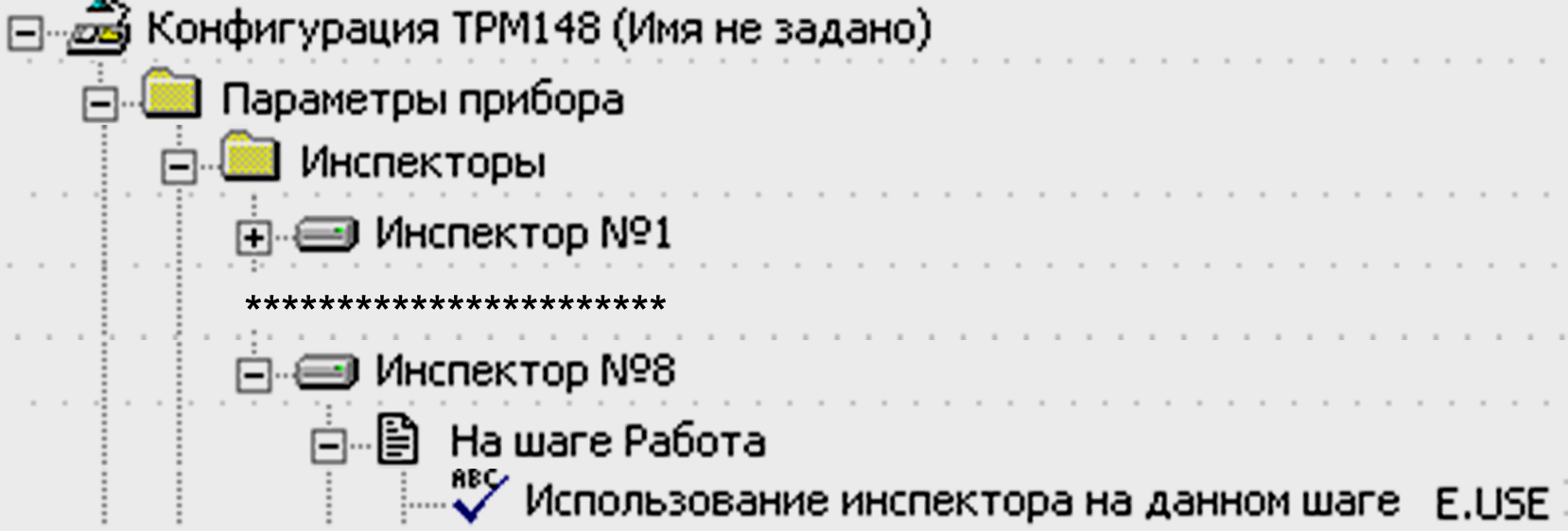
при каждом состоянии, задав параметр e.use.
Блок Логики принятия решения об аварии
Если к инспектору не подключен ВЭ, то все сигналы от инспекторов одного объекта собираются в блок логики принятия решения об аварии. Этот модуль производит логическую операцию «И» или логическую операцию «ИЛИ» со всеми поступающими сигналами от инспекторов в него входящих. На выходе этот блок логики выдает сигнал об аварии объекта.
Наглядно работа блока логики принятия решения об аварии изображена на рисунке.

Для перехода Объекта в аварийное состояние:
объединение по схеме «И» требует срабатывания всех Инспекторов.
ВниманиеАварийный сигнал подается только в том случае, если сработали все инспекторы в подключенных каналах и у всех инспекторов rel.a = OFF.объединение по схеме «ИЛИ» требует срабатывания хотя бы одного любого подключенного Инспектора из инспекторов во включенных каналах.
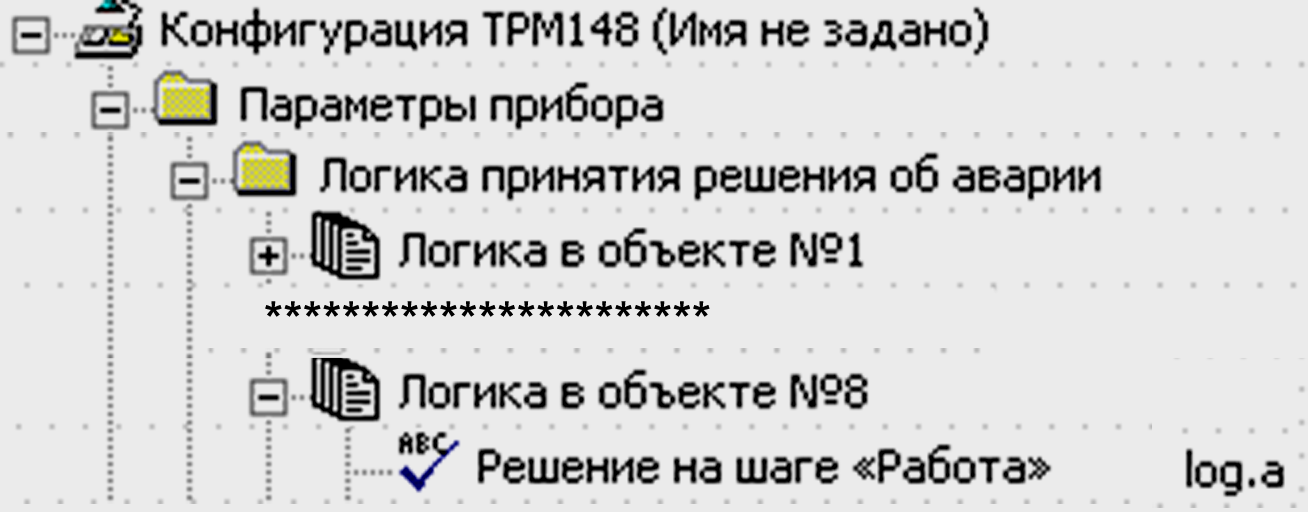
Логика принятия решения («И» или «ИЛИ») задается параметром log.a для любого из состояний каждого объекта.
Пороги срабатывания Инспектора и способы их отсчета
Пороги срабатывания Инспектора определяют допустимый диапазон регулируемой величины. Количество задаваемых порогов (один или два) зависит от типа логики срабатывания Инспектора.
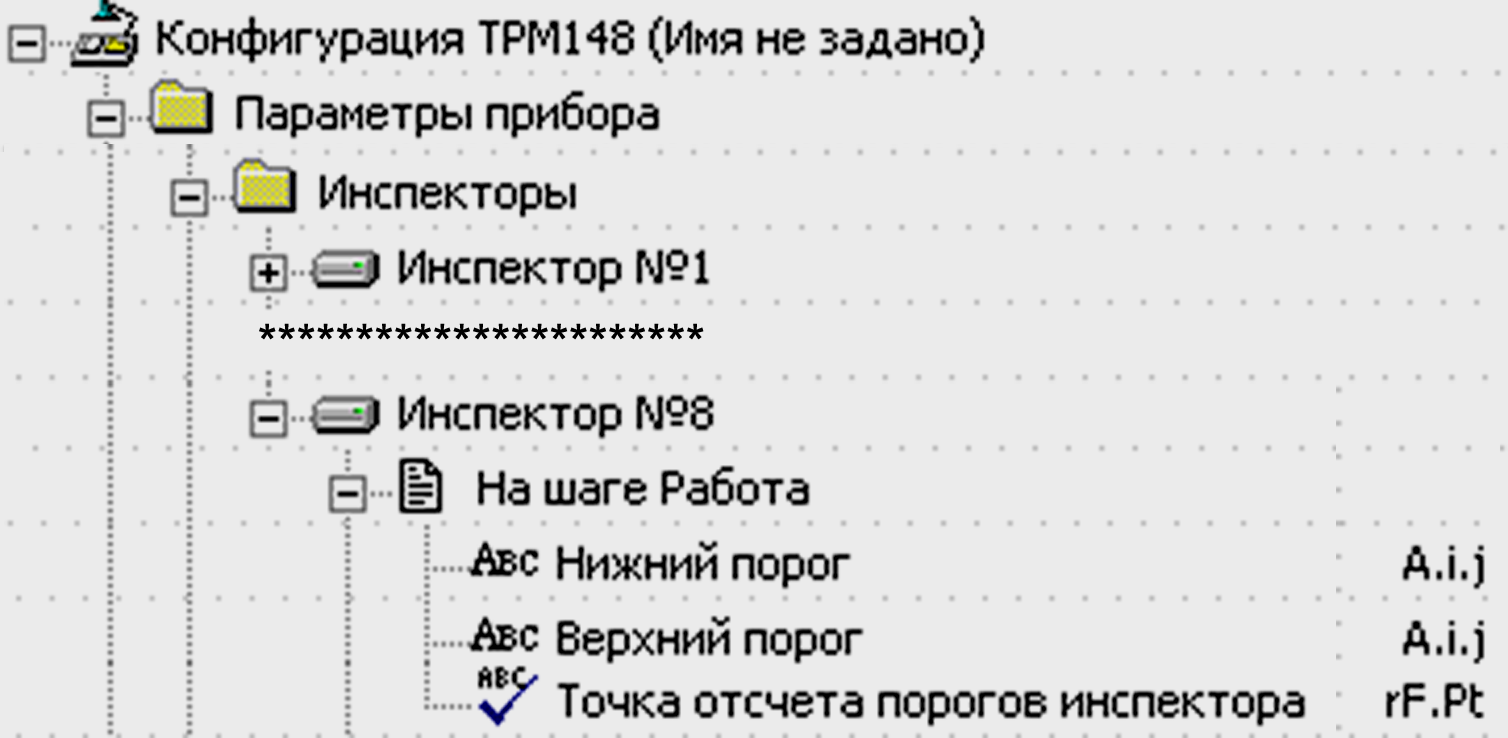
Пороги задаются параметром A.i.j в единицах регулируемой величины. Необходимо также задать способ отсчета порогов параметром rF.Pt. Пороги могут быть двух типов:
абсолютные (за 0 принят 0 физической величины (более точно – 0 на выходе вычислителя в канале));
относительные (за 0 принято текущее значение уставки).
При задании относительных порогов прибор пересчитывает их значения относительно текущего значения Уставки Регулятора.
Логика срабатывания Инспектора
В приборе имеется возможность в каждом объекте выбрать логику срабатывания Инспектора.
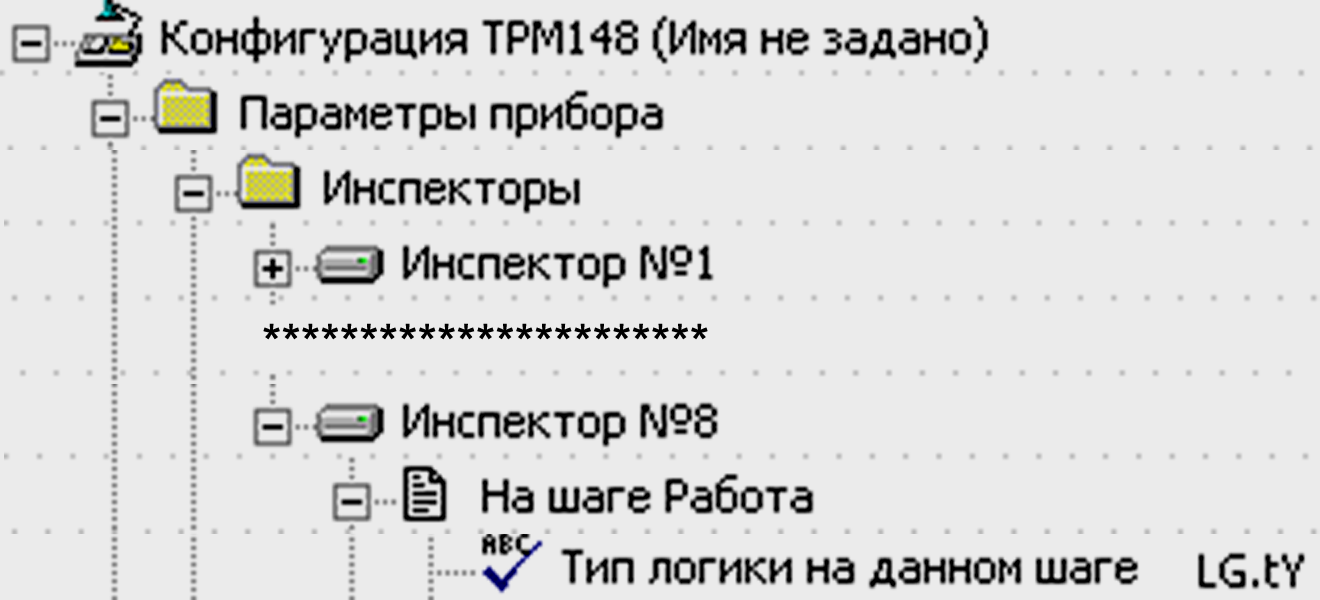
Возможны 4 варианта логики срабатывания Инспектора:
если регулируемая величина становится выше порога (прямая логика);
если регулируемая величина становится ниже порога (обратная логика);
при выходе регулируемой величины за заданный порогами диапазон (U-образная логика);
при входе регулируемой величины в заданный порогами диапазон (П-образная логика).
Для типов логики 3 и 4 задаются два порога.
Для типов логики 1 и 2 задается только порог № 1. Затем значения порогов автоматически уравниваются.
Тип логики срабатывания Инспектора задается параметром LG.tY.
Работа Инспектора по каждому из четырех типов логики представлена на рисунках ниже.
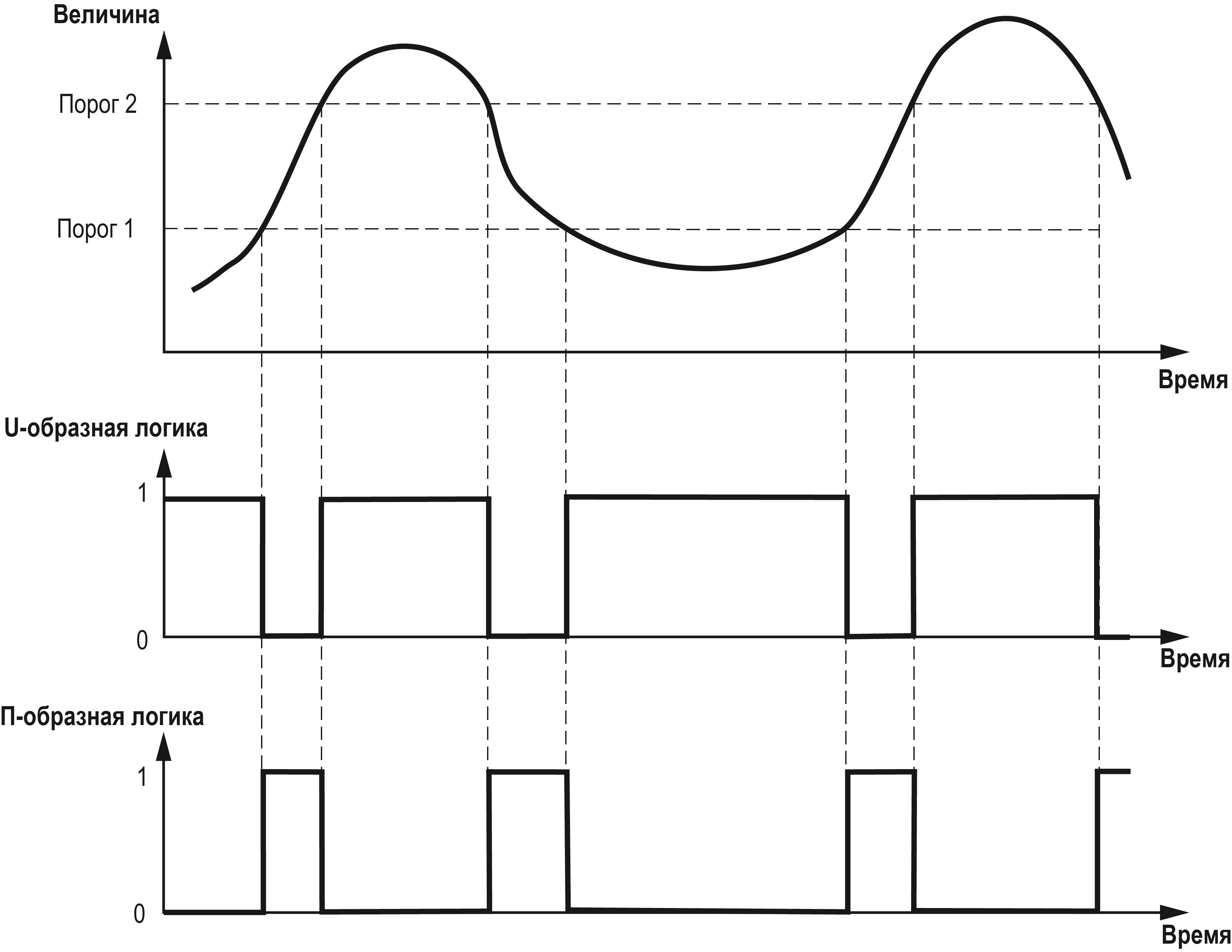
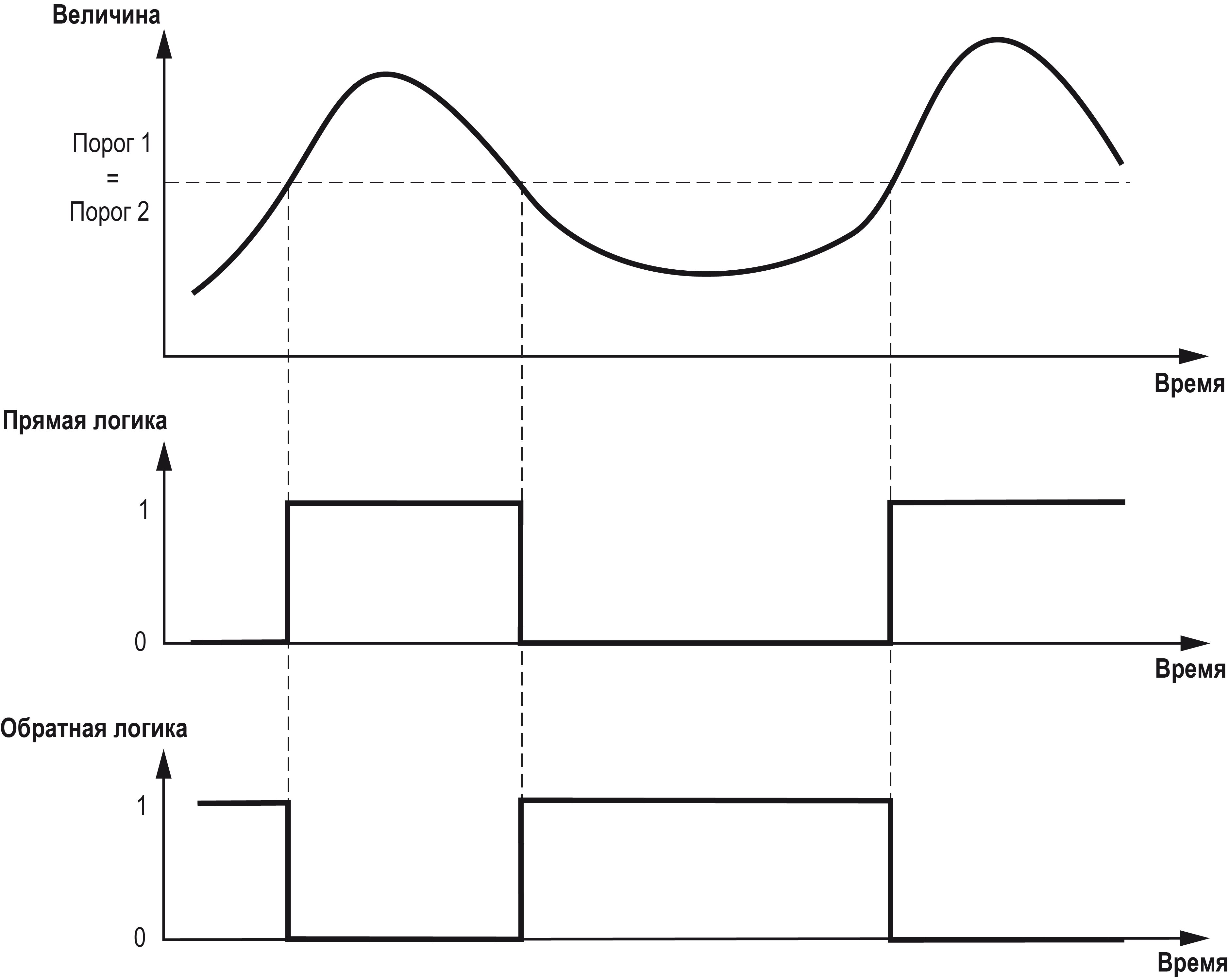
Выходом Инспектора является число +1 или 0.
При выходе, равном +1, происходит срабатывание Инспектора.
При выходе, равном 0, срабатывания Инспектора не происходит.
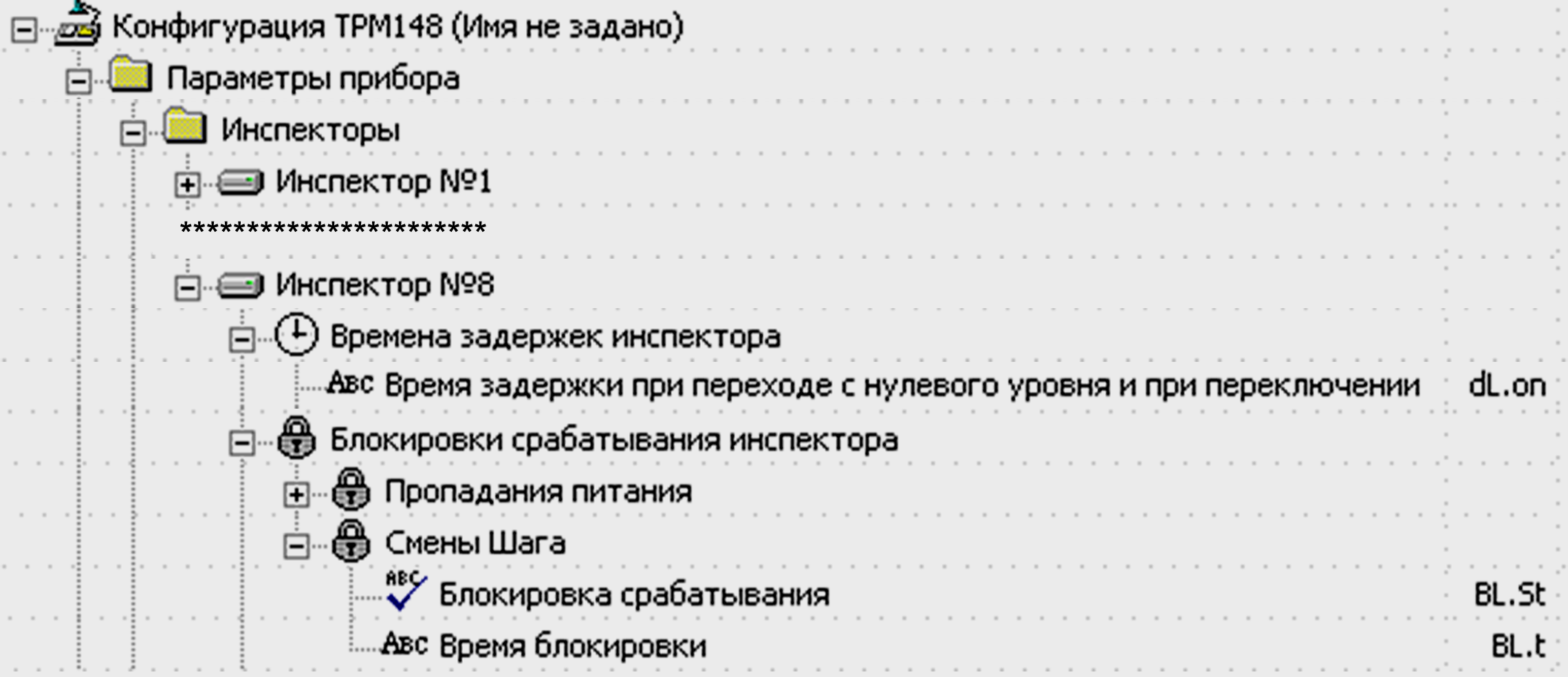
Блокировки и задержки срабатывания Инспектора
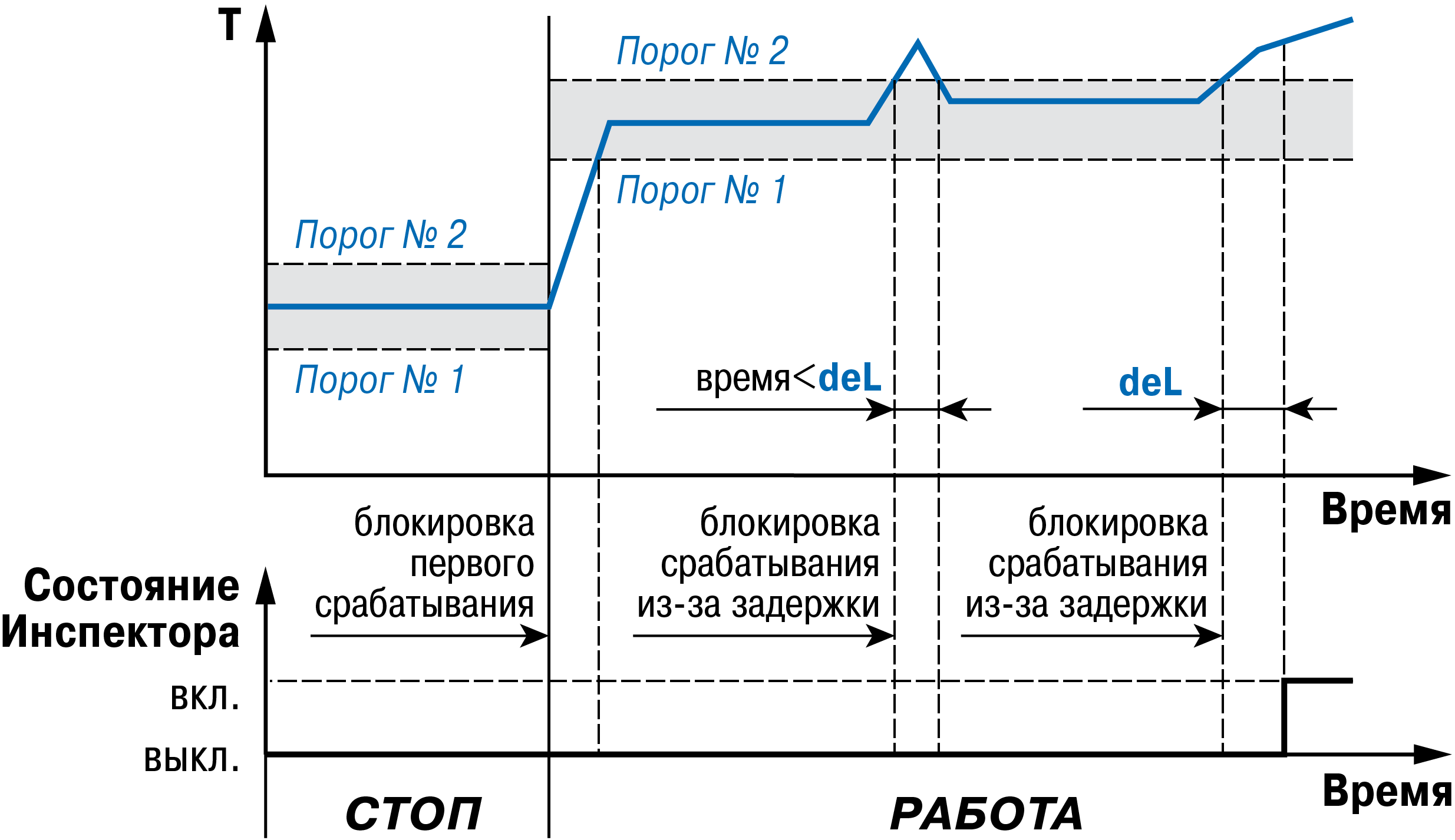
В приборе реализована возможность блокировки срабатывания Инспектора при определенных условиях. Существуют два типа блокировок: блокировка первого срабатывания и блокировка пиковых выбросов.
Блокировка первого срабатывания
Блокировка первого срабатывания необходима в начале технологического процесса или после восстановления пропадавшего питания. В этих случаях регулируемая величина может находиться за допустимыми пределами, – и это штатная ситуация.
Срабатывание Инспектора следует блокировать, т. к. в противном случае произойдет переход в состояние АВАРИЯ или ложно сработает подключенный к Инспектору ВЭ.
Прибор позволяет блокировать первое срабатывание Инспектора на определенное время (параметр BL.t) или до входа в разрешенный допустимый диапазон. Также можно включить блокировку по обоим условиям (время или вход в диапазон) или отключить блокировку срабатывания.
Тип блокировки первого срабатывания Инспектора определяется параметром BL.St.
Прибор позволяет задать независимые условия блокировок срабатывания Инспектора для ситуаций начала регулирования (т. е., перехода в состояние «работа») и восстановления пропадавшего питания.
Блокировка пиковых выбросов
Блокировка пиковых выбросов регулируемой величины за допустимые пределы применима в тех случаях, когда разрешается кратковременный выход регулируемой величины за допустимые границы. Можно задать время задержки срабатывания Инспектора, и если длительность выброса меньше этого времени, произойдет блокировка срабатывания.
Время задержки срабатывания задается в параметре dEL. Пример логики работы Инспектора с U-образной логикой с блокировками изображен на рисунке ниже.
Необходимо учитывать, что в приборе имеются дополнительные параметры, отвечающие за работу инспектора (hys.c, hoLd), позволяющие задать гистерезис и время удержания инспектора при подключении к нему ВЭ.
Параметр hold используется, например, для удержания сигнального оборудования во включенном состоянии заданное время. Соответственно, для включения сирены в случае аварии минимум на 1 мин следует задать значение hold равным 1:00.
Параметр hys.c для корректной работы Инспектора должен быть обнулен.
Регистратор в составе Канала
Регистратор – программный модуль в составе канала, предназначенный для преобразования величины, пришедшей с Вычислителя того же Канала, в аналоговый сигнал, и дальнейшей передачи на ВЭ типа ЦАП.
Номер ВЭ для Регистратора устанавливается параметром OP.i. Если параметру OP.i задано значение «не задействован», Регистратор в Канале отключен.
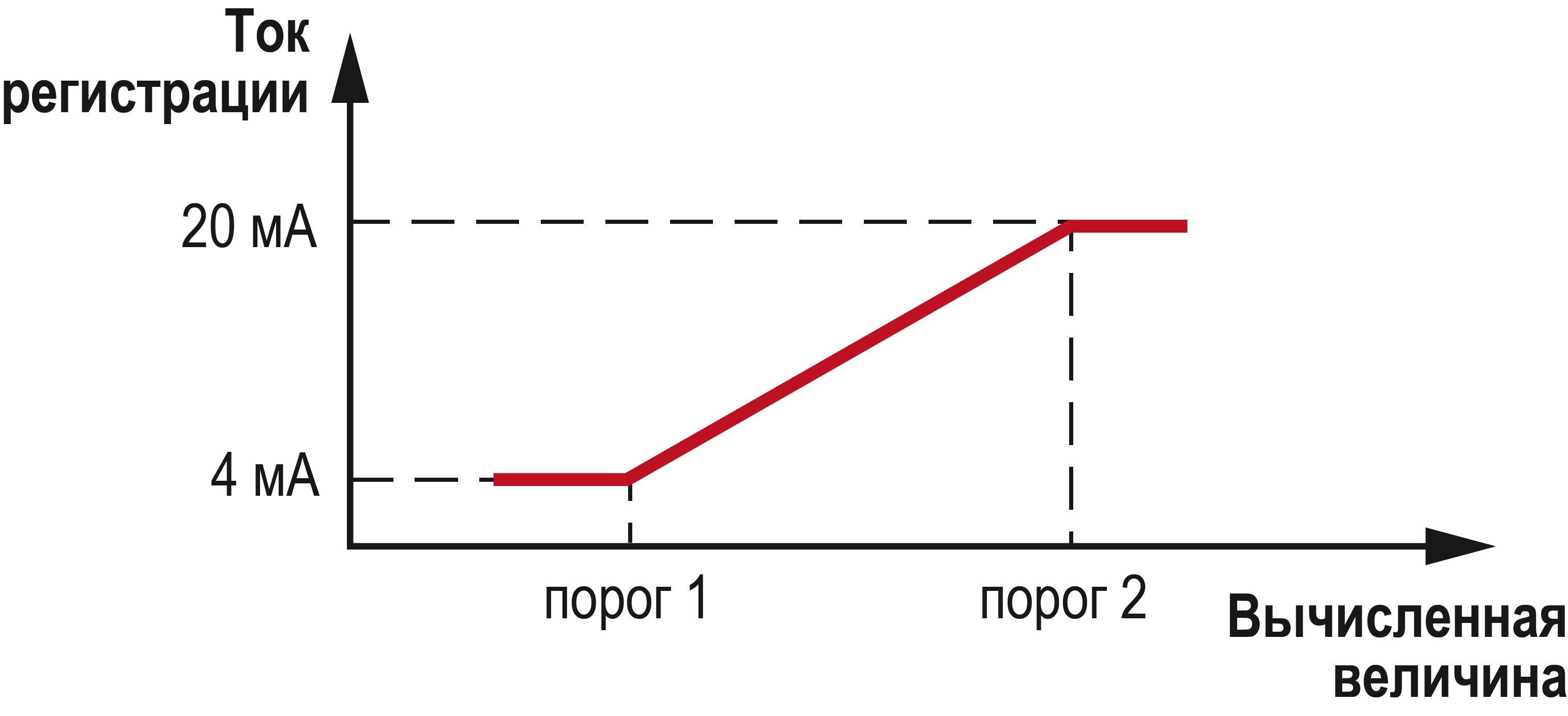
Для работы Регистратора задаются 2 пороговых значения – параметры Ao.L и Ao.H, соответствующие минимальному и максимальному выходному сигналу, соответственно. Пороговые значения задаются в той же размерности, в какой представлена вычисленная величина.
Работа Регистратора изображена на рисунке.
Сигнал с Регистратора может быть прочитан в сети RS-485 другим прибором или ПК. При передаче в сеть сигнал Регистратора приводится к диапазону 0…1.
Состояние Регистратора при аварии описывается параметром Er.St. Для передачи данных о значении с Регистратора в другой прибор или ПК используется оперативный параметр rd.rg, имеющий формат Float. Индексация оперативного параметра rd.rg схожа с индексацией параметра r.out, описанного выше.
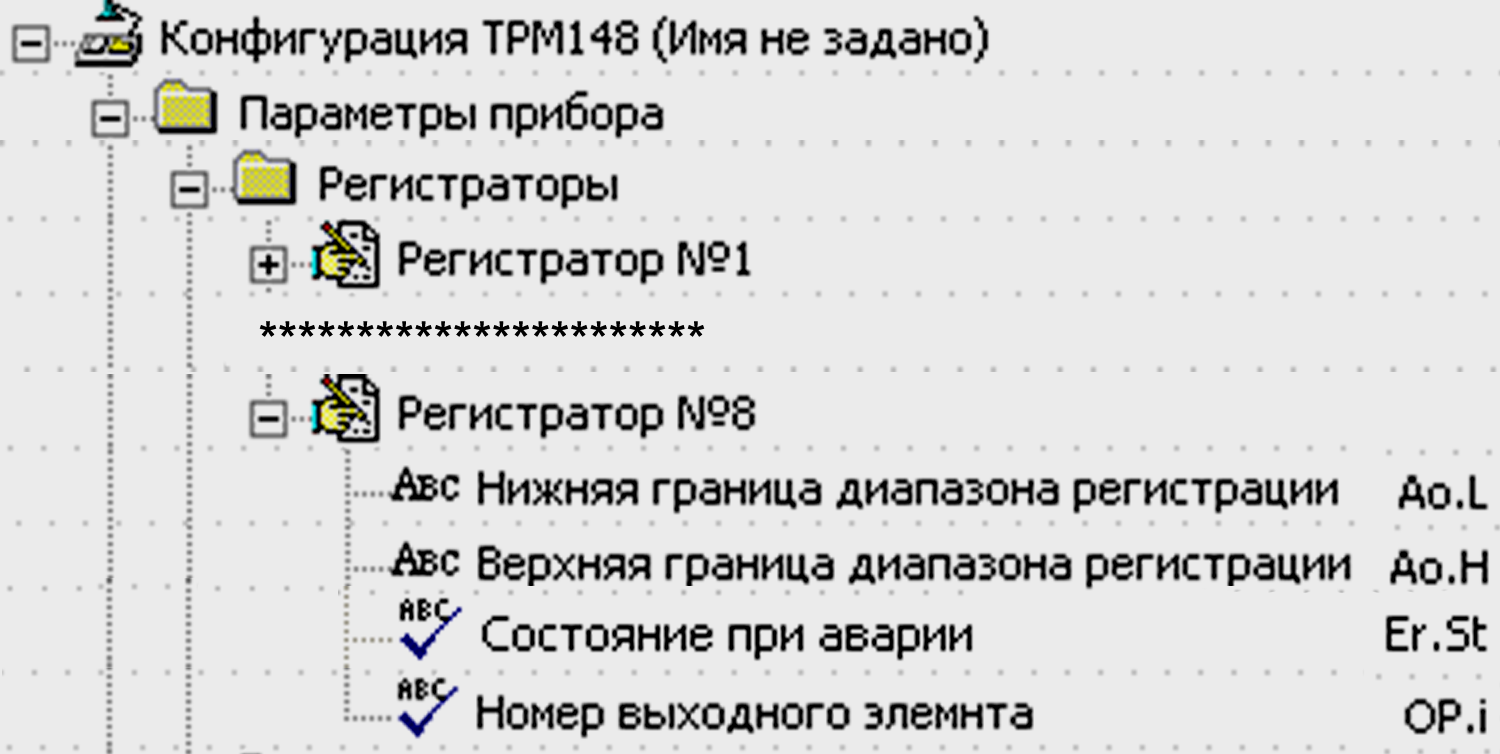
Значение параметра Er.St («Включен» или «Выключен»), задает состояние, в которое перейдет Регистратор, если на входе (входах) Вычислителя канала происходит обрыв датчика, информация с которого поступает в регистратор. Если прибор находится в состоянии Авария, но обрыва датчика, подключенного к регистратору нет, то регистратор работает в нормальном режиме. Значения параметра «Включен» и «Выключен» означают максимальный и минимальный уровень сигнала на выходе Регистратора.
Уставки. Графики коррекции уставки
Уставка – значение параметра, которое требуется поддерживать с помощью Регулятора в данный момент времени. Уставка вместе с текущим значением регулируемой величины подается на вход Регулятора.
Для каждого Регулятора задаются следующие параметры Уставки:
тип Уставки;
значение Уставки;
подключение/отключение Графика коррекции Уставки
скорость выхода на Уставку;
допустимые границы задания Уставки.
Способ задания Уставки
В приборе реализован следующий вариант задания Уставки: Уставка задается ПС, затем передается Регулятору, подключенному к данному ПС.
Тип Уставки
В приборе ТРМ148 в качестве Уставки могут быть заданы:
значение регулируемой физической величины (тип – «значение»);
значение выходной мощности, передаваемой в ПС (тип – «мощность»).
Тип Уставки задается параметром P.-SP.
Задание Уставки типа «мощность» бывает следует на некоторых стадиях техпроцесса (в т. ч. на стадии остановки процесса), когда контролировать физический параметр системы не требуется или невозможно. При этом типе уставки задается фиксированное значение мощности, которое будет подаваться на ИМ. Регулирование отключено.
Значение Уставки
Значение Уставки типа «значение» задается в единицах регулируемой величины и должно находиться в диапазоне измерения Датчика (точнее в диапазоне Вычисления, т. к. регулятор работает с Вычислителем).
Значение Уставки типа «мощность» задается в относительных единицах и принимает значения:
в диапазоне от «0» до «1», – если используется БУИМ типа «нагреватель»;
в диапазоне от «–1» до «0», – если используется «холодильник»;
в диапазоне от «–1» до «1», – если используется как нагреватель, так и холодильник.
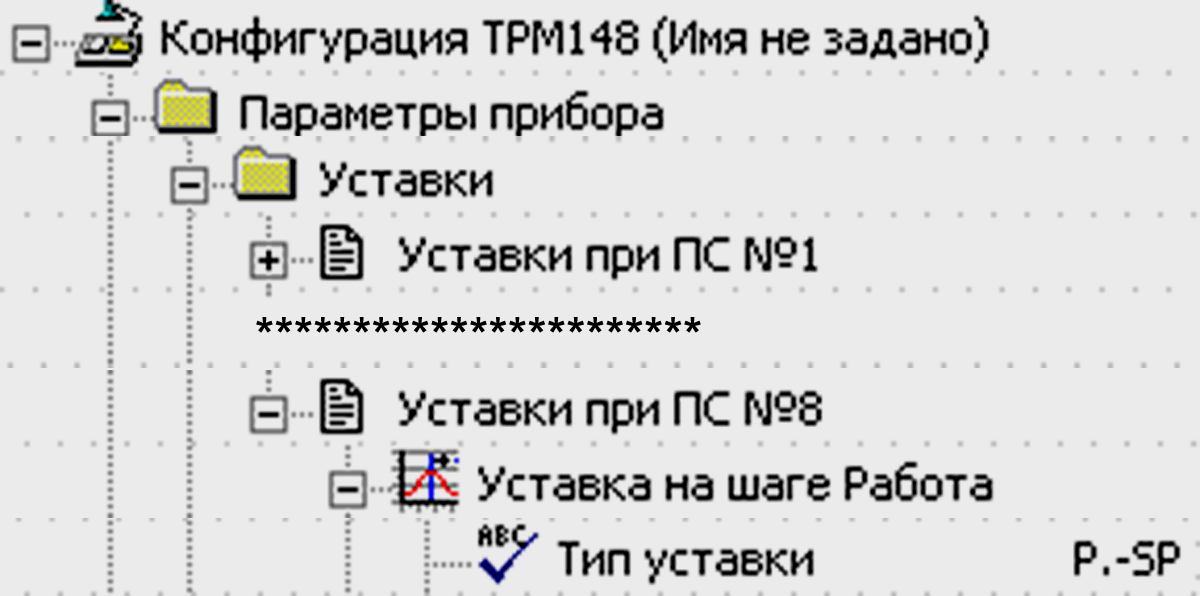
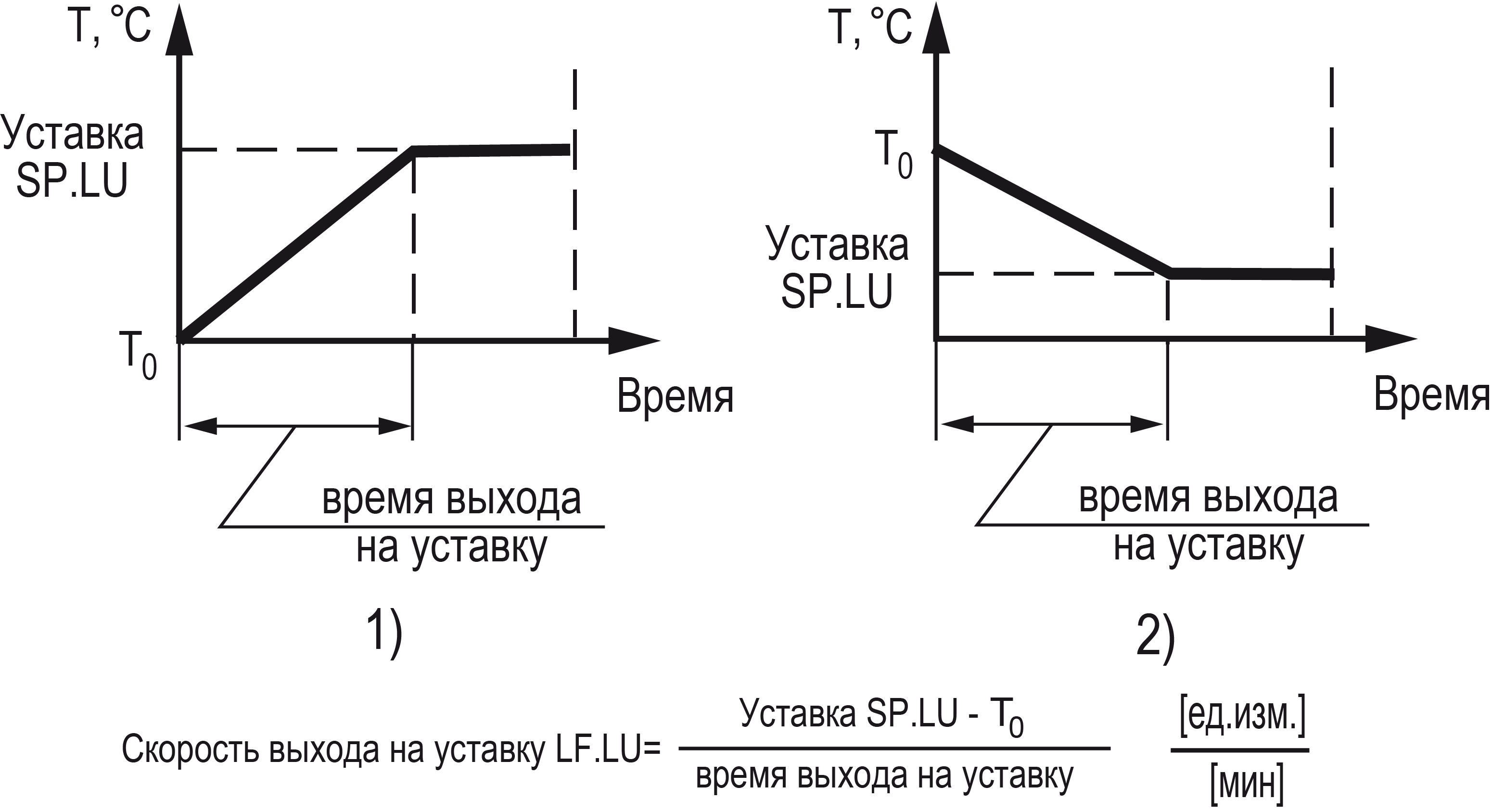
Скорость выхода на Уставку
В приборе можно ограничить скорость выхода на Уставку.
Эта функция используется в тех случаях, когда регулируемая величина должна плавно, с заданной скоростью, возрастать или уменьшаться:
в течение части времени функционирования – до достижения Значения уставки, далее осуществляется поддержание достигнутого значения Уставки (см. рисунок ).
В начале функционирования Уставка принимает значение, равное начальному значению регулируемой величины (Т0), и сразу начинает изменяться с заданной скоростью. Например, если регулируется температура, то при начале функционирования Т0 примет значение температуры окружающей среды и начнет расти (или уменьшаться) с заданной скоростью от этого значения.
Параметр Скорость выхода на уставку LF.LU задается в единицах регулируемой величины в минуту. Если задать параметру LF.LU значение «0», то скорость принимается равной бесконечности, т. е. Уставка мгновенно достигает значения, задаваемого параметром SP.LU.
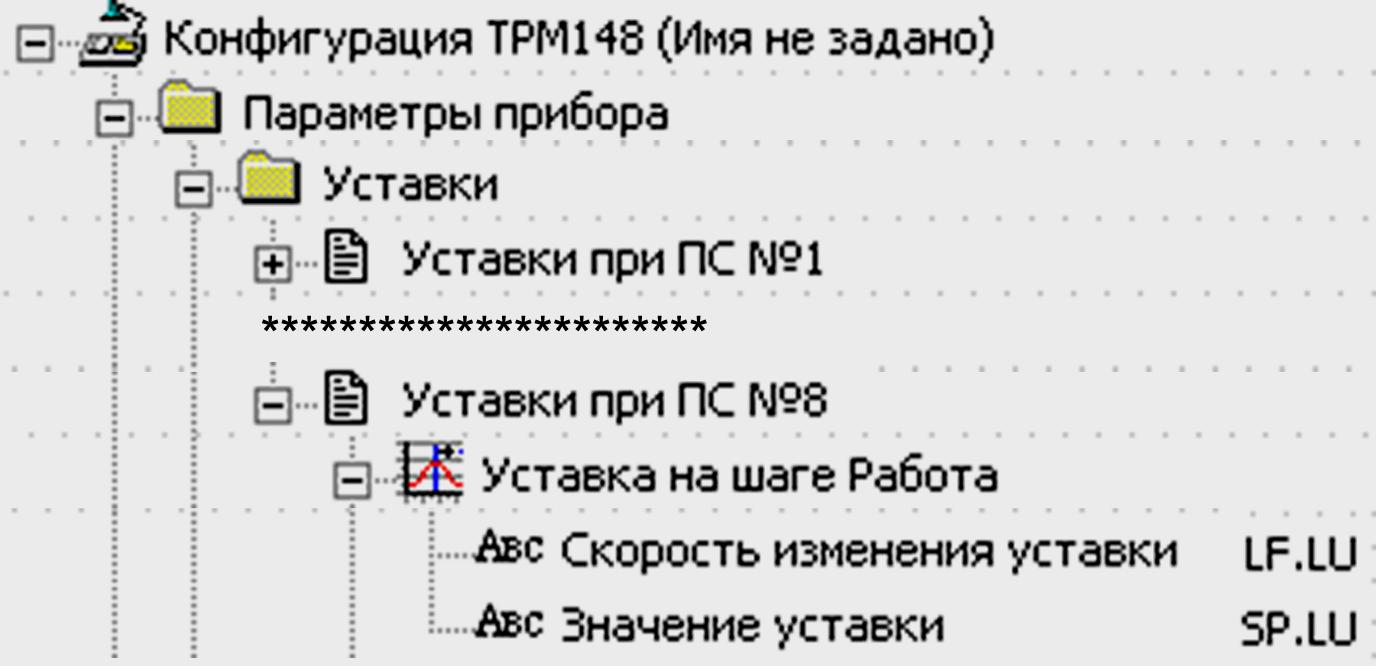
Графики коррекции уставки
В ряде случаев требуется, чтобы Уставка не являлась константой, а изменялась в зависимости от какого-то внешнего параметра. Например, в системах отопления температура теплоносителя должна меняться в зависимости от уличной температуры.
Для реализации подобной коррекции Уставки в приборе введены восемь Графиков. Каждый График представляет собой зависимость корректирующего значения от внешней величины. Внешняя величина может быть взята с любого из имеющихся работающих вычислителей, а также быть временем, исчисляемым в минутах. Для каждого объекта имеется свое независимое время. Уставка от времени может быть использована в тех процессах, в которых следует, чтобы уставка во время технологического процесса изменялась по времени. Канал, содержащий подключенный к графику вычислитель, должен быть включен.
Графику можно задать до 10 узловых точек, которые автоматически соединяются отрезками, образуя ломаную линию.
В процессе работы вычисленное по Графику корректирующее значение прибавляется к установленной Уставке. Механизм работы Графиков коррекции Уставки изображен на рисунке. Необходимо отметить, что Уставкапрогр. задается параметром SP.LU.
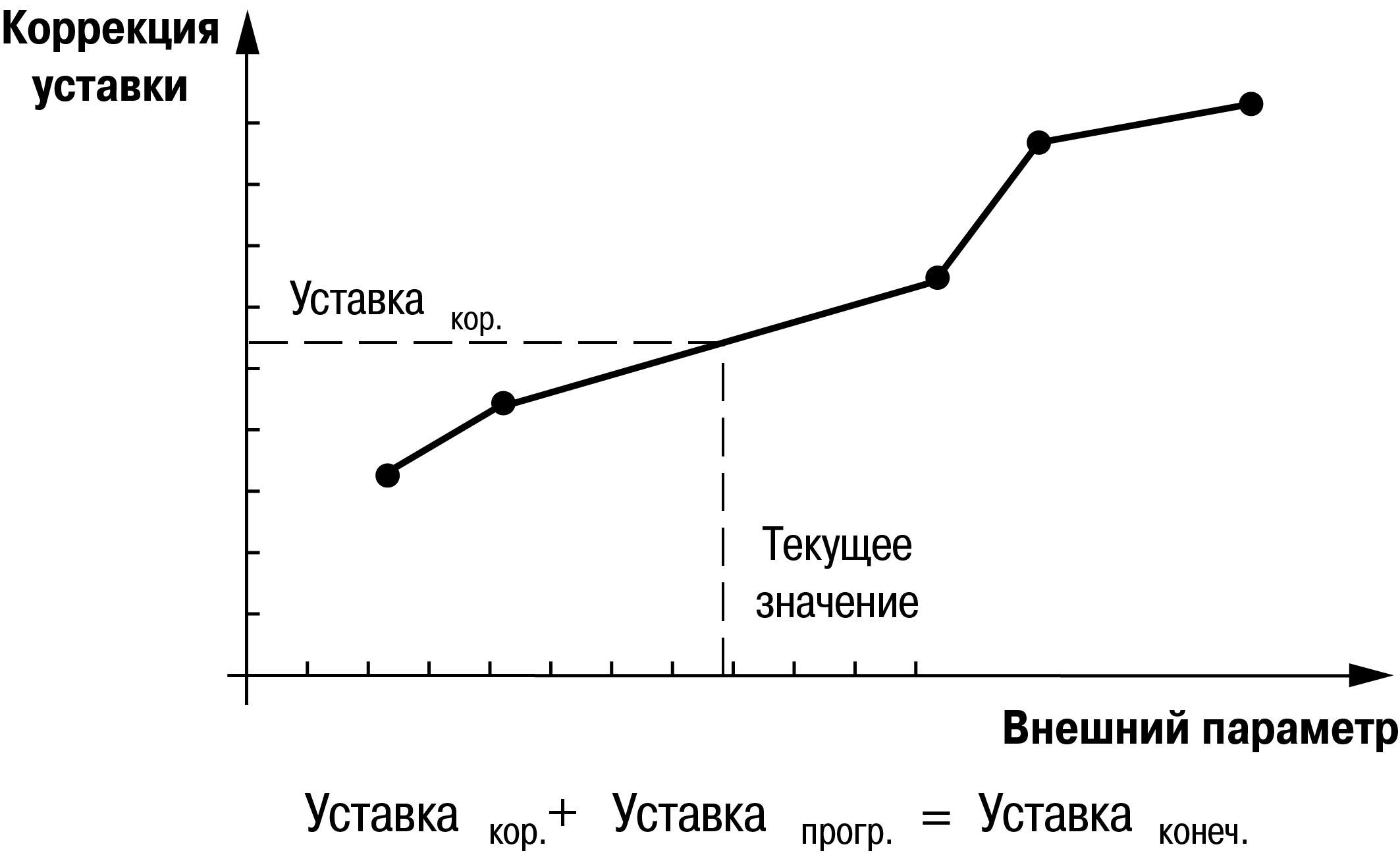
График коррекции Уставки можно подключить или отключить параметром or.SP.
Аварийные ситуации и их возможные причины
Для ТРМ148 различают два вида АВАРИЙ: Критическую и Некритическую.
Поведение при критической аварии
В состоянии «Критическая АВАРИЯ» прибор не может продолжить работу без вмешательства извне.
Причиной возникновения критической аварии могут быть:
обрыв или неисправность датчика;
ВниманиеПрибор переходит в состояние «Авария» при обрыве датчика только в случае, если датчик применяется по назначению, т. е. в канале, в котором он подключен, используется уставка с типом (параметром p.-sp) = «значение».разрыв контура регулирования (LBA-авария);
выход регулируемой величины за допустимые пределы.
О критической аварии сигнализируют:
сообщение «FAIL» на ЦИ2
непрерывное свечение или мигание светодиода «АВАРИЯ»;
срабатывание (замыкание) ВЭ, предназначенного для подключения к нему различного оборудования, сигнализирующего о наступлении аварии.
Для подключения различного оборудования, сигнализирующего о наступлении
аварии, можно использовать любой свободный дискретный выход прибора.
В качестве ИМ-сигнализатора могут быть использованы различные сирены,
звонки, сигнальные лампы и т. д. При переходе прибора в режим АВАРИИ
происходит срабатывание указанного ВЭ. Это режим «Авария с сигнализацией» (слово FAIL на ЦИ2 и светодиод «АВАРИЯ» мигают).
Для отключения сигнального оборудования следует нажать кнопку . Прибор отключит ВЭ и перейдет в режим «Авария
без сигнализации» (слово FAIL на ЦИ2 и светодиод
«АВАРИЯ» включены).
После устранения причины АВАРИИ можно возобновить работу. Для этого
следует в течение 2 - 3 с нажать кнопку  . Прибор перейдет в состояние,
предшествовавшее наступлению аварии.
. Прибор перейдет в состояние,
предшествовавшее наступлению аварии.
Если причина АВАРИИ не была корректно устранена, то прибор автоматически вернется в состояние «Авария с сигнализацией».
Поведение при некритической аварии
В состоянии «Критическая АВАРИЯ» ТРМ148 продолжает функционировать. Прибор выдает предупреждение, и у оператора есть возможность оперативно устранить неисправность до того момента, когда АВАРИЯ станет критической.
О некритической аварии сигнализирует сообщение Attn, которое отображается на ЦИ2 с периодом ~2 с.
Индикация о некритической аварии сбрасываются кнопкой .
Выяснение причины АВАРИИ
Для того, чтобы выяснить причину любой аварии (критической или
некритической), следует нажать и удерживать кнопку .
На ЦИ2 отображается Код АВАРИИ.
Возможные причины аварий
Код Аварии | Причины Аварии |
|---|---|
104 | Инспектор сработал, т. е. выдал сигнал АВАРИИ |
90 | Ошибка конфигурации |
100 | Ошибка измерения |
220 | Авария после отключения питания |
0 | Ошибка отсутствует или уже устранена |
| АВАРИИ, индексируемые по каналам | |
32 + № Канала | Ошибка при расчете уставки по графику |
104+ № Канала | Сработал Инспектор в канале и выдал сигнал АВАРИИ |
80 + № Канала | Ошибочное измерение в состоянии РАБОТА |
40 + № Канала | LBA-авария |
192 + № Канала | Не подключено Выходное устройство |
208 + № Канала | Не подключен Регулятор |
224 + № Канала | Регуляторы подключены к разным объектам |
| Некритические АВАРИИ, индексируемые по каналам | |
8 | Сигнализация при работе в режиме Ручного управления |
176 + № Канала | Ошибочное измерение в Канале, номер которого приведен в коде |
№ канала (в объекте) для ТРМ148 принимает значения 0…7. | |