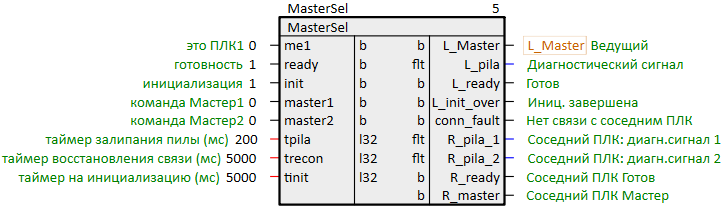
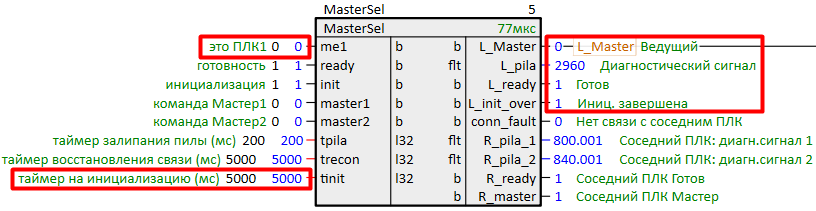
Ведомый контроллер – контроллер, который находится в «горячем» резерве и синхронизирует данные с ведущим контроллером.
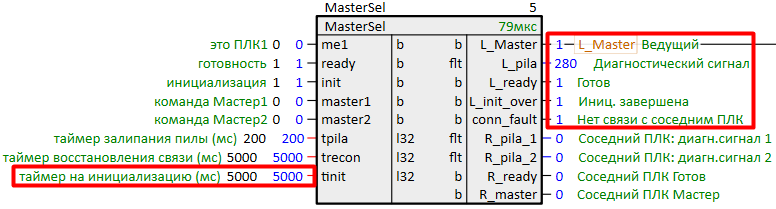
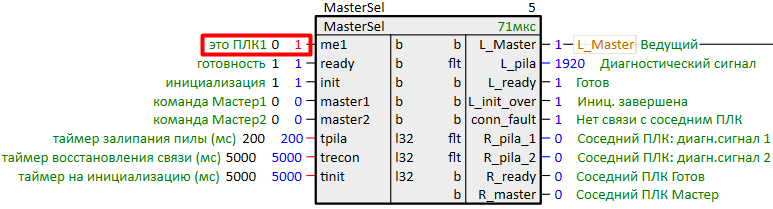
Ведущий контроллер – контроллер, с которым синхронизируется ведомый контроллер. В зависимости от реализованной схемы резервирования ведущий контроллер может принимать на себя роль мастера для линейки модулей ввода/вывода, выдавать сигналы на каналы вывода на своем борту и т.д.
Определение ведущего контроллера или переключение роли ведущего между контроллерами – алгоритм выбора текущей роли контроллера: ведущий или ведомый. Может быть как автоматическим, так и ручным (по команде оператора).
ОС – операционная система.
ЛКМ (ПКМ) – левая (правая) кнопка мыши.
ПЛК – программируемый логический контроллер.
Резервирование (по ГОСТ 27.002-89) – способ обеспечения надежности объекта за счет использования дополнительных средств и (или) возможностей, избыточных по отношению к минимально необходимым для выполнения требуемых функций.
Резервирование замещением (по ГОСТ 27.002-89) или 100 % «горячее» резервирование – резервирование, при котором функции основного элемента передаются резервному только после отказа основного элемента.
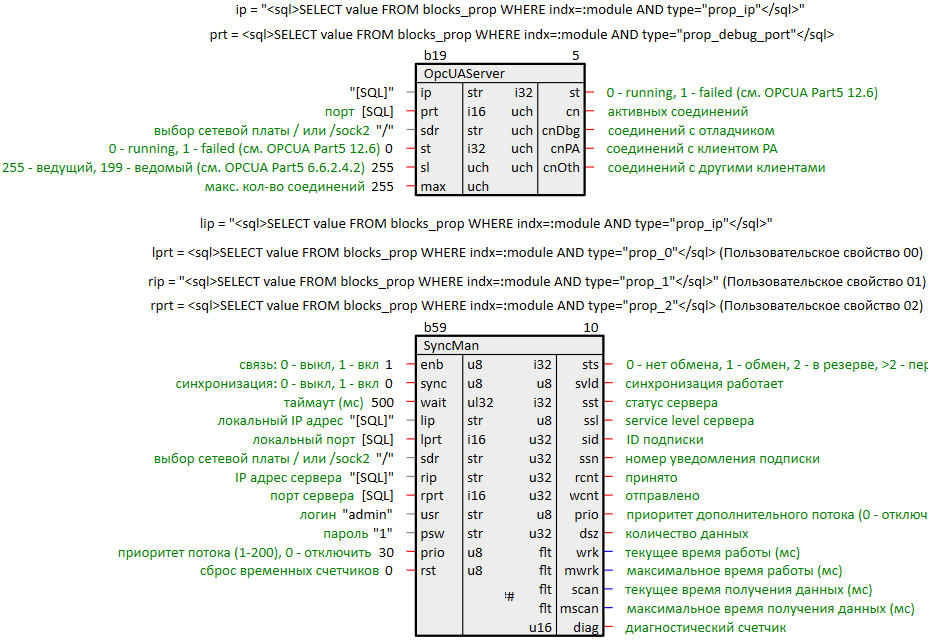
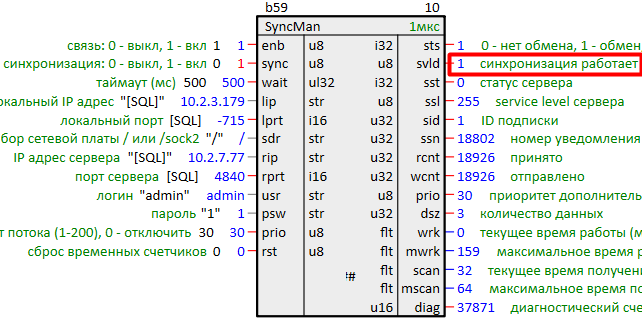
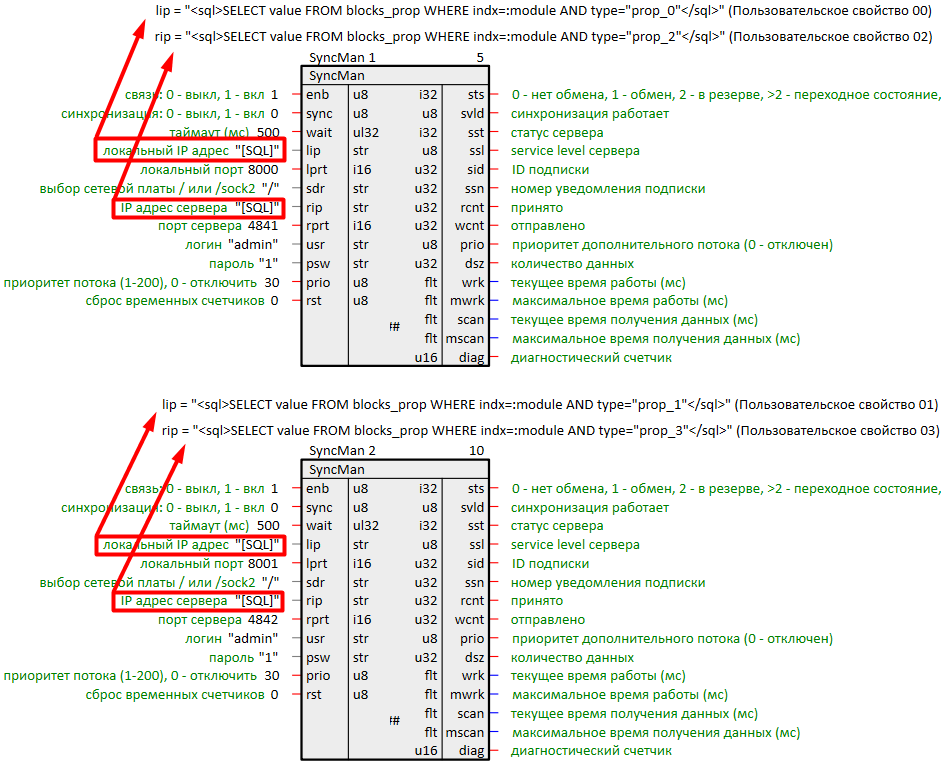
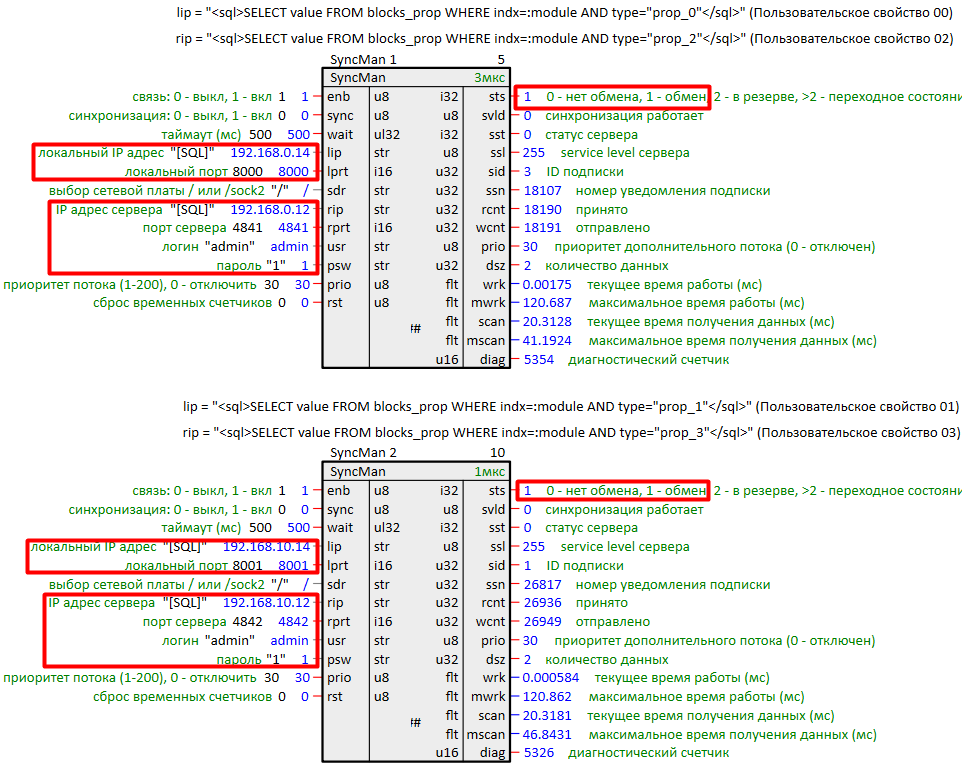
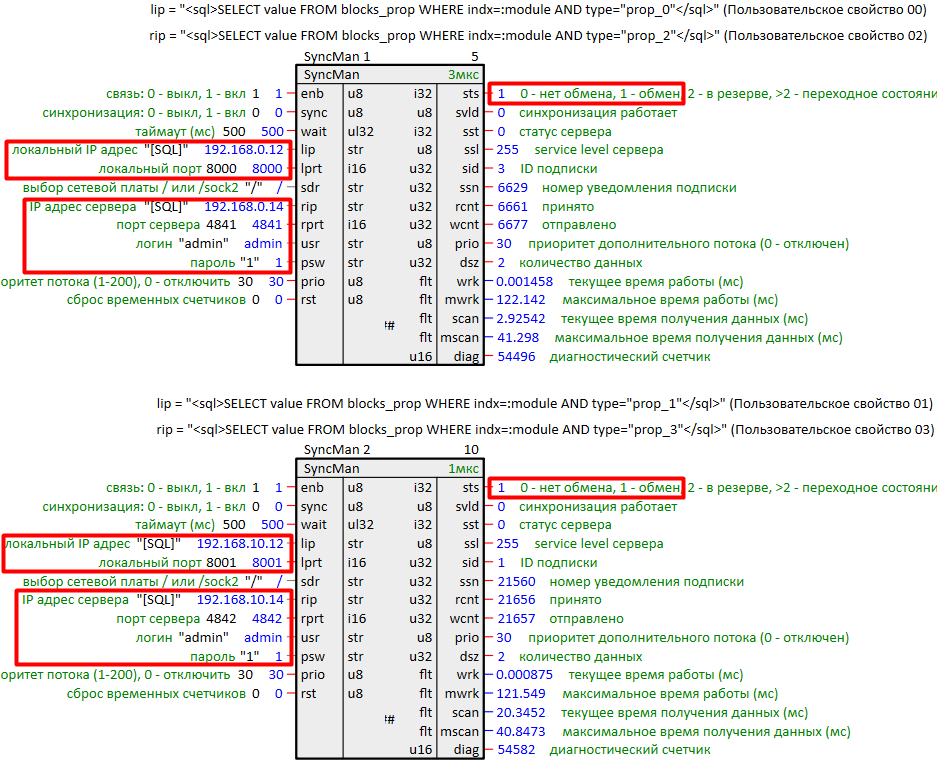
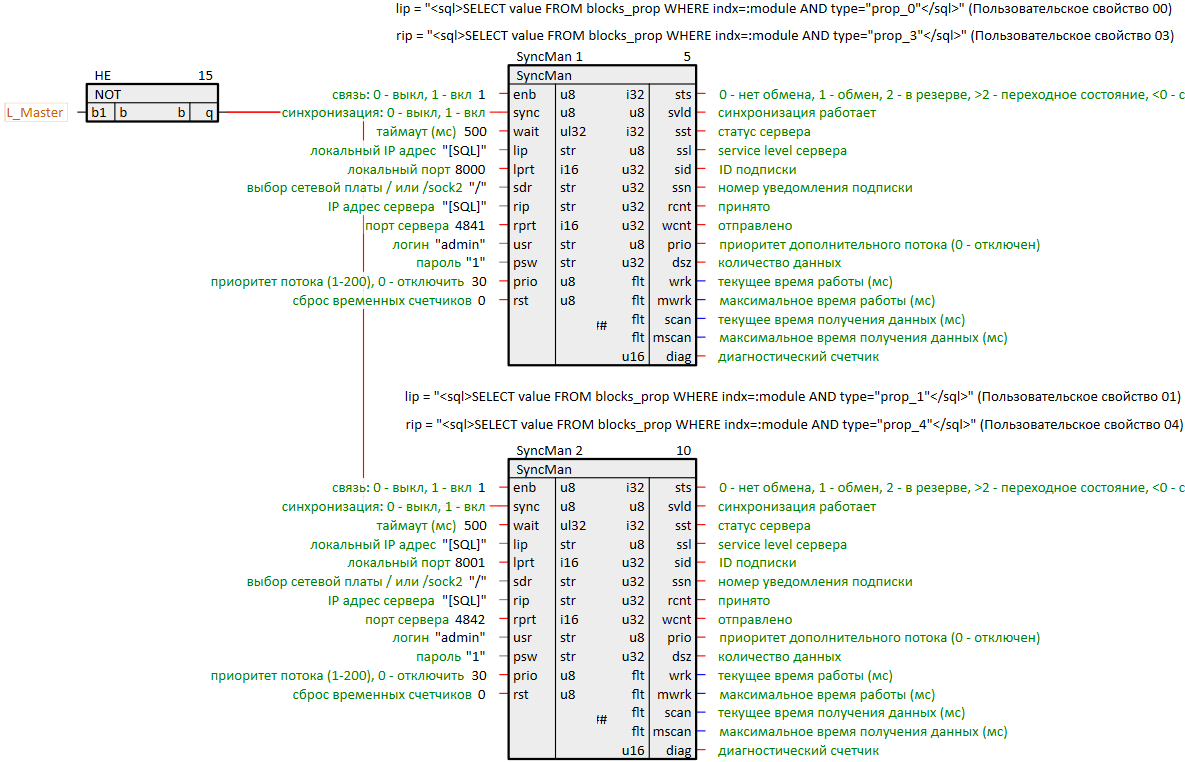
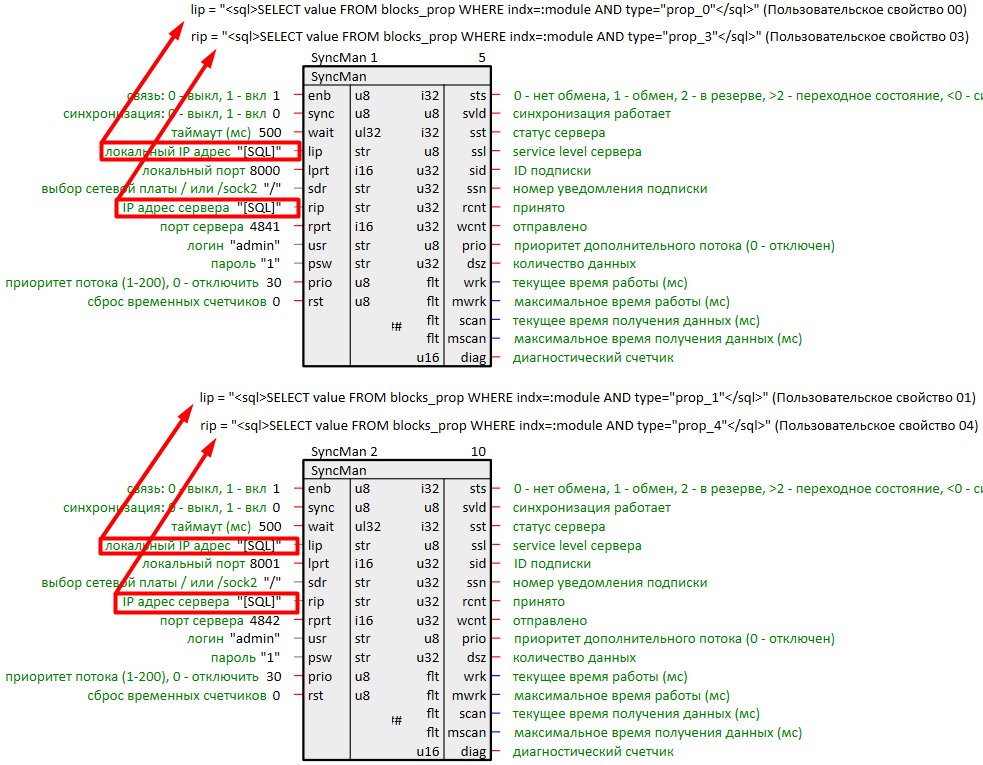
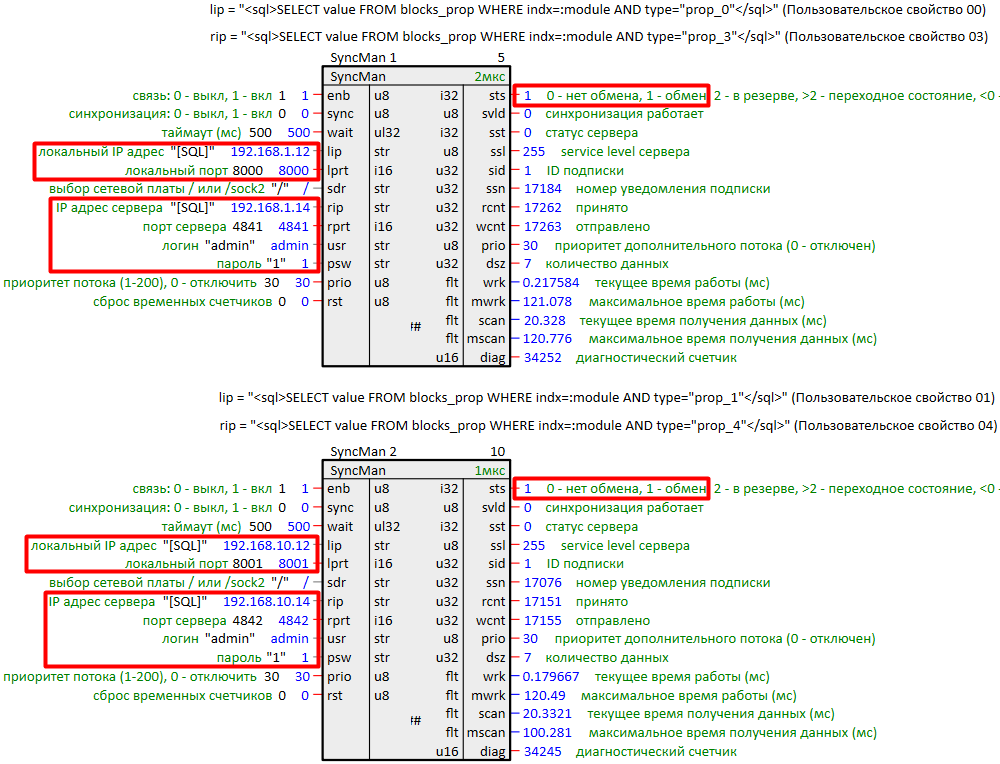
Синхронизация данных – устранение различий между двумя аналогичными наборами данных контроллеров посредством обмена информацией по выделенным линиям связи.
Runtime (среда выполнения) – вычислительное окружение, необходимое для выполнения компьютерной программы и доступное во время выполнения компьютерной программы.
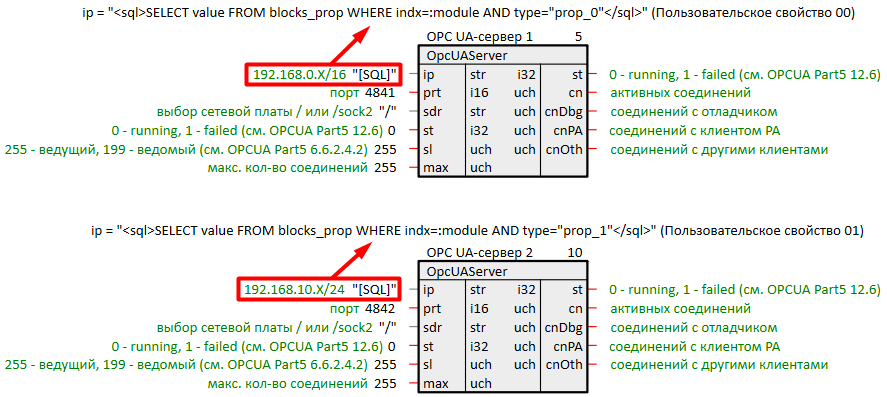
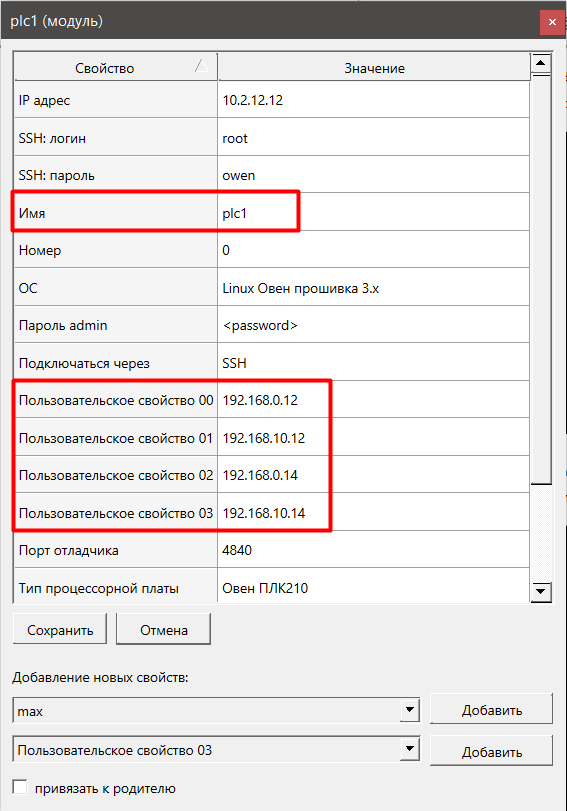
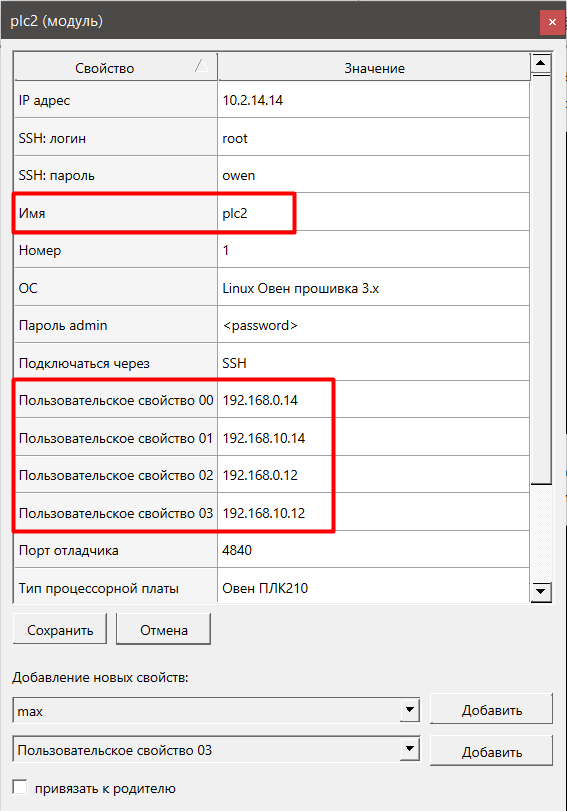
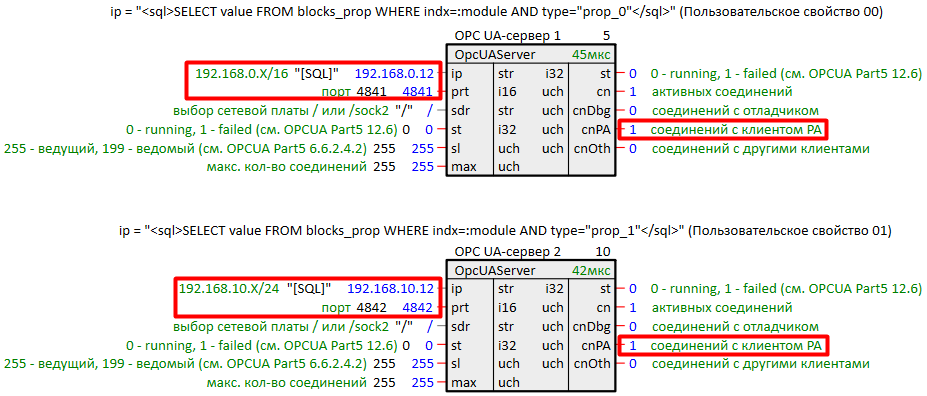
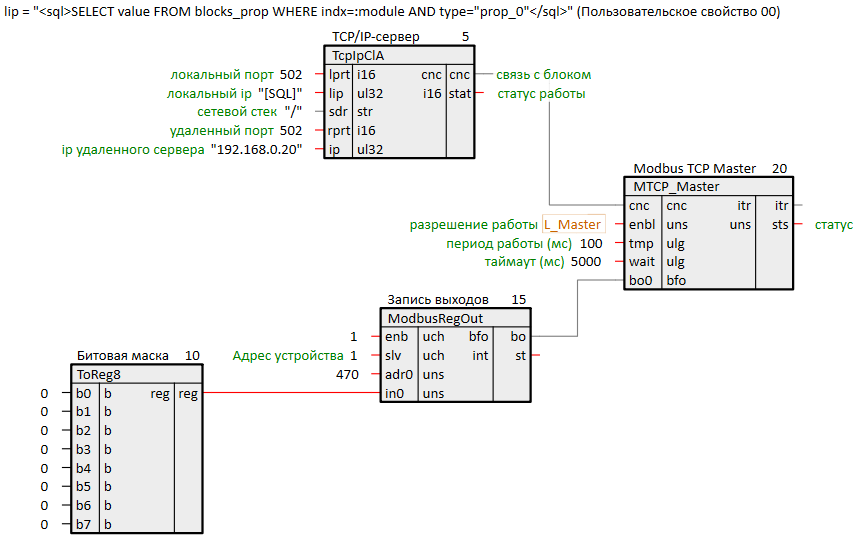
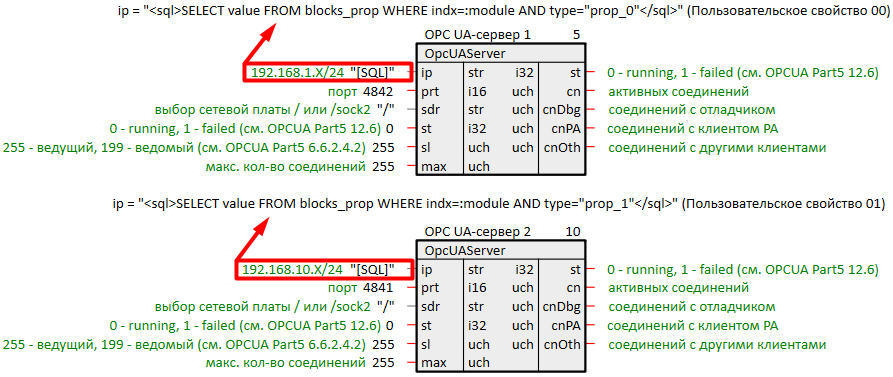
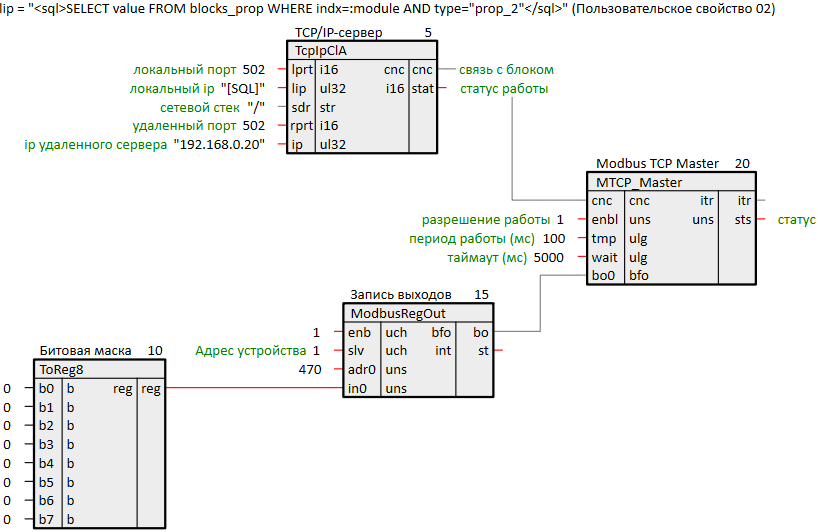
SQL (Structured Query Language) – язык программирования для хранения и обработки информации в реляционной базе данных.