Настоящее руководство пользователя предназначено для ознакомления обслуживающего персонала с устройством, конструкцией и подключением платы интерфейсной CANopen ПИК1(М01), в дальнейшем по тексту именуемой «интерфейсная плата CANopen» или «плата». Плата не является самостоятельным устройством и предназначена для работы в составе ПЧВ3(М01).
Руководство пользователя
Введение
Назначение и функции
Интерфейсная плата CANopen предназначена для подключения преобразователя частоты к сети CAN и управления им по протоколу CANopen.
Плата поддерживает следующие функции протокола CANopen:
контроль работоспособности (Heartbeat);
асинхронный обмен SDO;
периодическую запись в частотный преобразователь четырех объектов данных RPDO и периодическое чтение из частотного преобразователя четырех объектов данных TPDO;
объекты для сообщений об ошибках (Emergency).
Устройство
Интерфейсная плата CANopen представляет собой одноплатное устройство с разъемом для установки в ПЧВ3 (М01), клеммами для подключения к шине CAN, переключателем согласующего резистора и светодиодными индикаторами, отображающими состояние работы платы.
Внешний вид и устройство интерфейсной платы CANopen, а также расположение на плате клемм, переключателя и индикаторов показаны на рисунке.
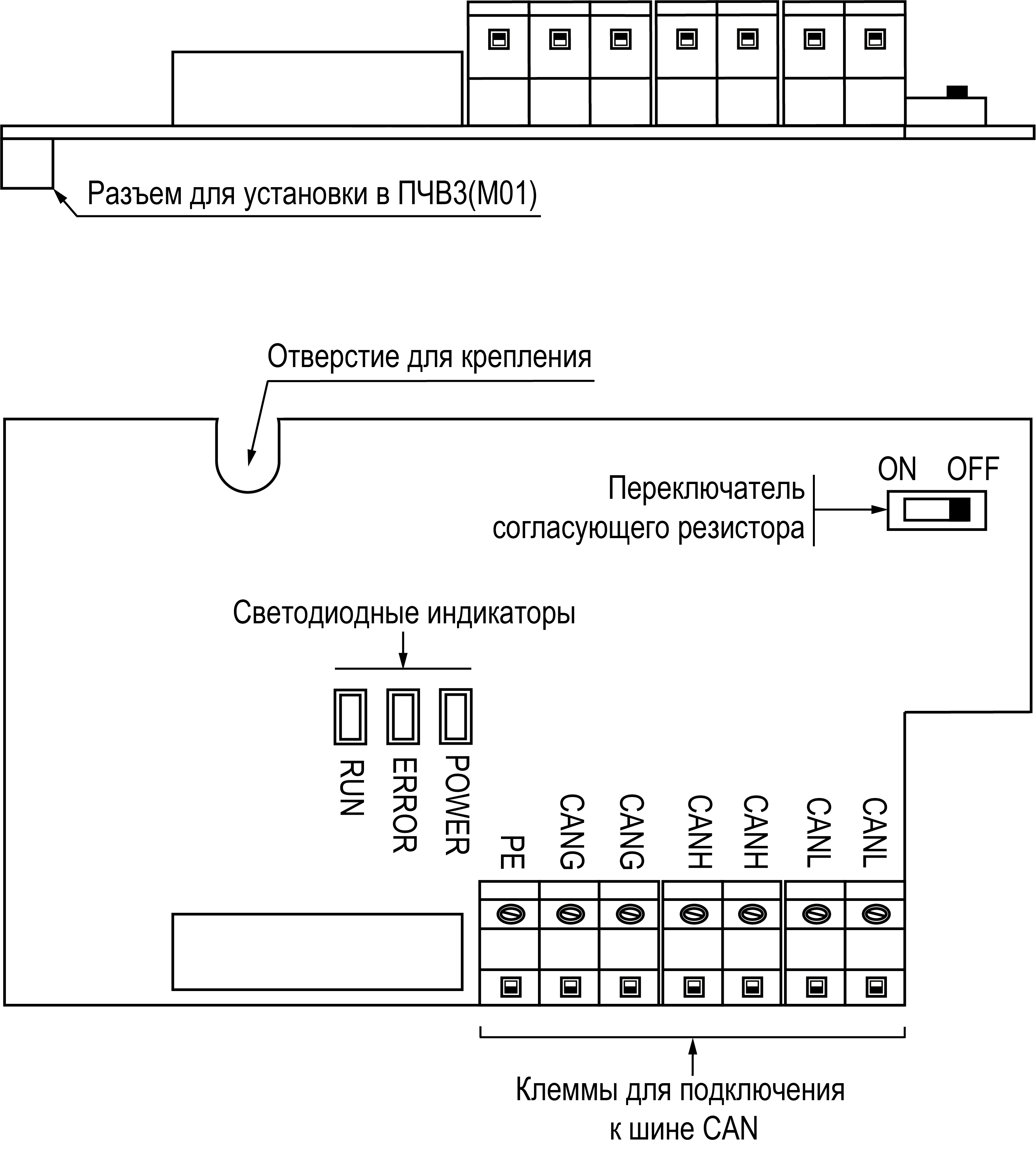
Назначение клемм, переключателя и индикаторов
Описание назначения клемм платы приведено в таблице.
Назначение клемм платы
Клемма | Назначение |
|---|---|
CANH | Клемма для подключения линии высокого уровня шины CAN |
CANH | Клемма для подключения линии высокого уровня шины CAN |
CANL | Клемма для подключения линии низкого уровня шины CAN |
CANL | Клемма для подключения линии низкого уровня шины CAN |
CANG | Клемма для подключения цепи общего провода шины CAN |
CANG | Клемма для подключения цепи общего провода шины CAN |
PE | Клемма заземления для подключения экрана кабеля |
Переключатель согласующего резистора (см. рисунок) предназначен для подключения и отключения встроенного согласующего резистора 120 Ом шины CAN.
Положение OFF переключателя соответствует отключению встроенного согласующего резистора от шины CAN.
Положение ON переключателя соответствует подключению встроенного согласующего резистора к шине CAN.
По умолчанию, переключатель согласующего резистора
установлен в положение OFF (согласующий резистор отключен от
шины CAN).
Описание назначения светодиодных индикаторов платы приведено в таблице.
Назначение индикаторов платы
| Индикатор (цвет) | Состояние | Описание |
|---|---|---|
POWER (красного цвета) | Включен | Питание платы в норме. |
Выключен | Питание платы отсутствует. | |
ERROR (красного цвета) | Включен | Ошибка связи с преобразователем частоты. |
Мигает | Неверный адрес устройства. | |
Двойное мигание | Авария преобразователя частоты. | |
RUN (зеленого цвета) | Включен | Состояние RUN: идет циклический обмен данными с ведущими устройствами. |
Мигает | Состояние PRE-RUN: Связь установлена, циклический обмен данными не запущен. | |
Выключен | Нет обмена данными. |
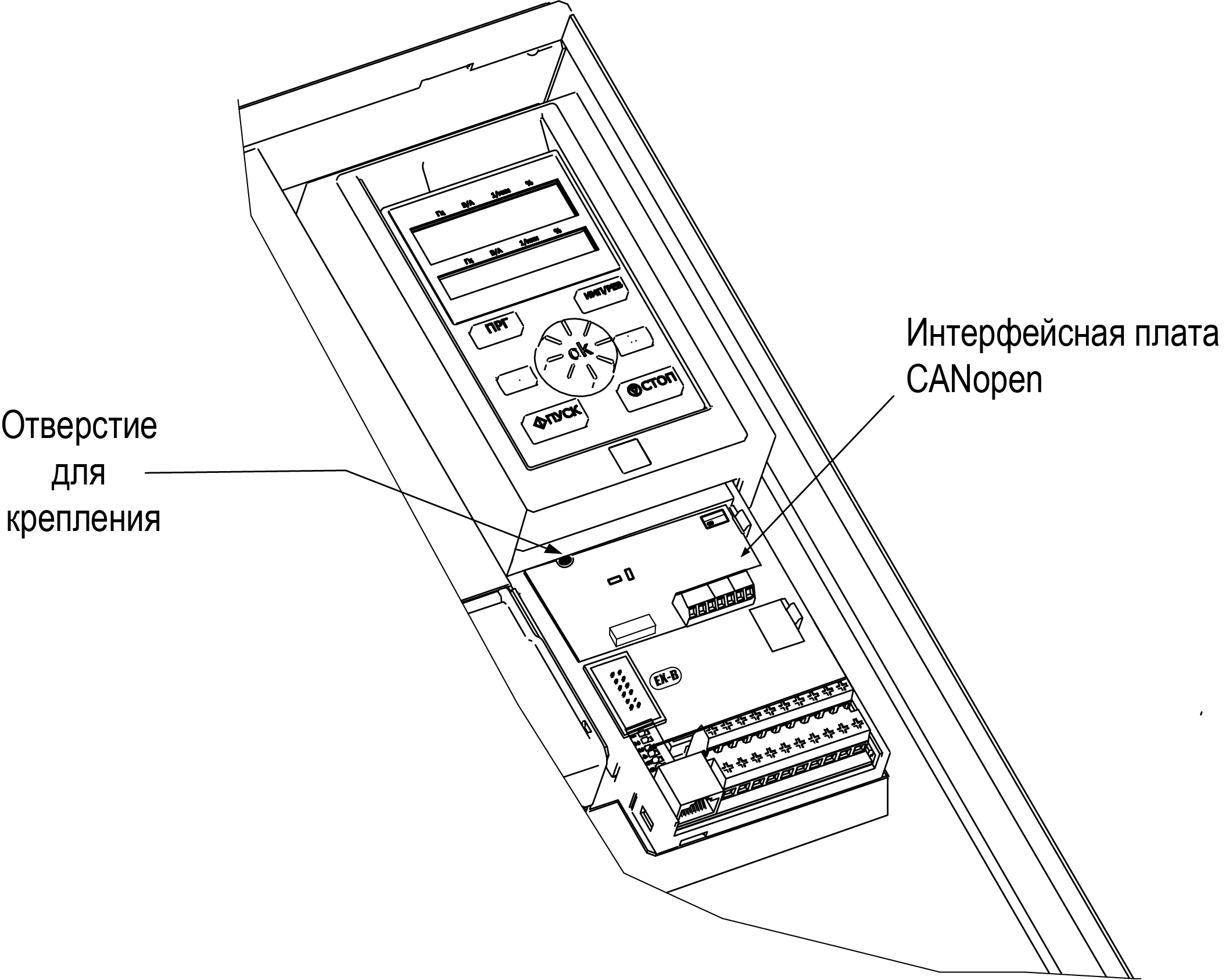
Монтаж интерфейсной платы CANopen
Плата устанавливается в разъем EX-A, расположенный на плате управления ПЧВ3(М01).
Запрещается устанавливать интерфейсную плату CANopen
в разъем EX-B или одновременно две интерфейсных платы CANopen
в разъемы EX-A и EX-B.
Монтаж платы производится в соответствии с рисунком в следующей последовательности:
Установить плату в разъем EX-A платы управления.
Закрепить плату при помощи винта, используя отверстие для крепления.
Настройка
Для управления преобразователем частоты с помощью интерфейсной платы CANopen следует задать значения параметров ПЧВ, приведенных в таблице.
Параметры настройки ПЧВ для управления с помощью интерфейсной платы CANopen
| Параметр | Значение параметра и описание |
|---|---|
| F01.01 | Задать значение 3. При данном значении параметра, в качестве источника команд для управления ПЧВ будет выбрана интерфейсная плата CANopen. |
| F01.02 | Задать значение 10, если через интерфейсную плату CANopen требуется задавать значение частоты. |
| F03.41 | Задать значение 7, если через интерфейсную плату CANopen требуется задавать значение крутящего момента. |
| F03.54 | Задать значение 7, если через интерфейсную плату CANopen требуется задавать ограничение частоты (прямое направление). |
| F03.55 | Задать значение 7, если через интерфейсную плату CANopen требуется задавать ограничение частоты (обратное направление). |
| F12.40 | Задать значение 1, если ПЧВ – ведущее устройство. Если ПЧВ – ведомое устройство, следует оставить значение 0, заданное по умолчанию. |
| F12.41 | Задать адрес устройства CAN (NodeID). Значение адреса задается в диапазоне от 1 до 247. После задания значения адреса необходимо выключить
и снова включить ПЧВ. |
| F12.42 | Данный параметр устанавливает скорость
обмена данными по интерфейсу CAN. Значение параметра задается в диапазоне
от 0 до 6 и соответствует скорости обмена:
При выборе значения скорости обмена данными
необходимо учитывать длину кабеля линии связи шины CAN в соответствии
с таблицей. После задания
значения для данного параметра необходимо выключить и снова включить
ПЧВ. |
| F12.43 | Значение данного параметра определяет действия, выполняемые ПЧВ при потере связи между ведущим и ведомым устройствами шины CAN. Если при потере связи не требуется выполнения каких–либо действий, следует оставить значение параметра 0, заданное по умолчанию. В противном случае, следует задать значение параметра в соответствии с требуемым действием:
|
Скорость обмена данными и длина кабеля линии связи шины CAN
| Скорость обмена данными по интерфейсу CAN | Длина кабеля линии связи, не более |
|---|---|
1 Мбит/с | 25 м |
500 Кбит/с | 100 м |
250 Кбит/с | 250 м |
125 Кбит/с (задана по умолчанию) | 500 м |
50 Кбит/с | 1000 м |
20 Кбит/с | 2500 м |
Подключение к шине CAN
Перед подключением ПЧВ с установленной платой к шине CAN следует убедиться, что состояние индикаторов платы свидетельствует о наличии электропитания платы, исправной работе ПЧВ и отсутствии ошибок связи платы с ПЧВ (см. таблицу).
При подключении к шине CAN необходимо учитывать зависимость длины кабеля связи от заданной скорости обмена данными по шине CAN (см. таблицу).
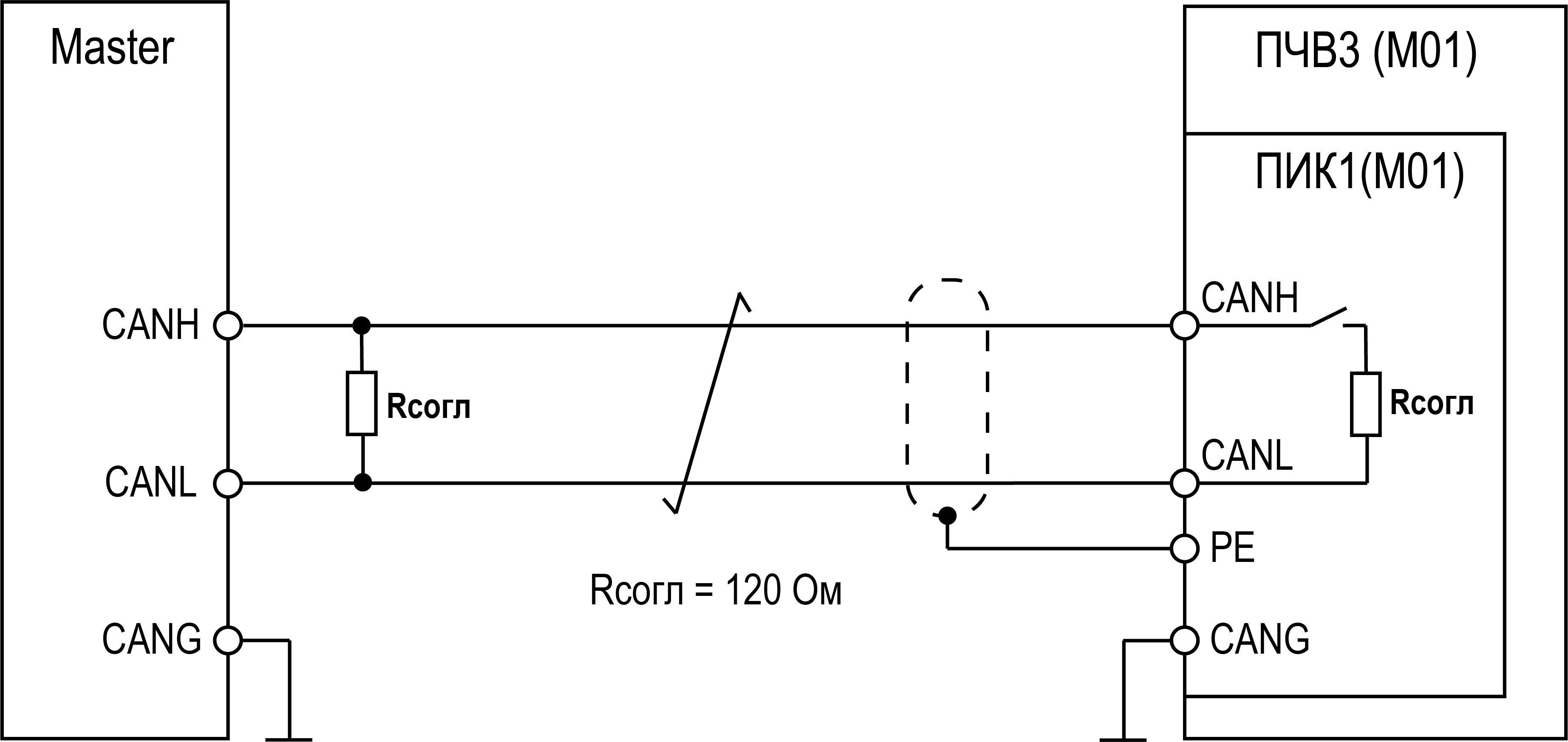
Для корректной работы, на обоих концах шины CAN должны быть подключены согласующие резисторы (Rсогл) 120 Ом. Для подключения согласующего резистора 120 Ом на стороне платы, необходимо установить переключатель согласующего резистора в положение ON (см. раздел).
Схема подключения платы к шине CAN приведена на рисунке.
Работа по протоколу CANopen
Плата поддерживает асинхронный обмен SDO, а также периодическую запись в частотный преобразователь четырех объектов данных RPDO и периодическое чтение из частотного преобразователя четырех объектов данных TPDO.
В качестве способа обнаружения ошибок работы устройств в сети CAN используется контрольное тактирование (протокол Heartbeat).
Для высокоприоритетных сообщений об ошибках (срочных сообщений) используются объекты Emergency.
Идентификатор CAN-сообщения (COB ID)
CAN-сообщение содержит идентификатор сообщения (COB ID). COB ID для соответствующих типов сообщений приведены в таблице.
COB ID сообщений
| Тип сообщения | COB ID (hex) |
|---|---|
NMT | 0x000 |
SYNC | 0x080 |
EMCY | 0x80+NodeID |
SDO Send | 0x600+NodeID |
SDO Receive | 0x580+NodeID |
RPDO1 | 0x200+NodeID |
RPDO2 | 0x300+NodeID |
RPDO3 | 0x400+NodeID |
RPDO4 | 0x500+NodeID |
TPDO1 | 0x180+NodeID |
TPDO2 | 0x280+NodeID |
TPDO3 | 0x380+NodeID |
TPDO4 | 0x480+NodeID |
NodeID – адрес (номер)
устройства в сети CAN | |
Доступ к параметрам через SDO
Параметры ПЧВ отображаются в объектах CANopen с использованием индекса (index) и субиндекса (subindex) объектного словаря CANopen.
При этом, индекс включает в себя номер группы параметров ПЧВ, а субиндекс – номер конкретного параметра ПЧВ:
| Index = 0x2000 + номер группы параметров | ||
| Subindex = 1+ номер параметра | ||
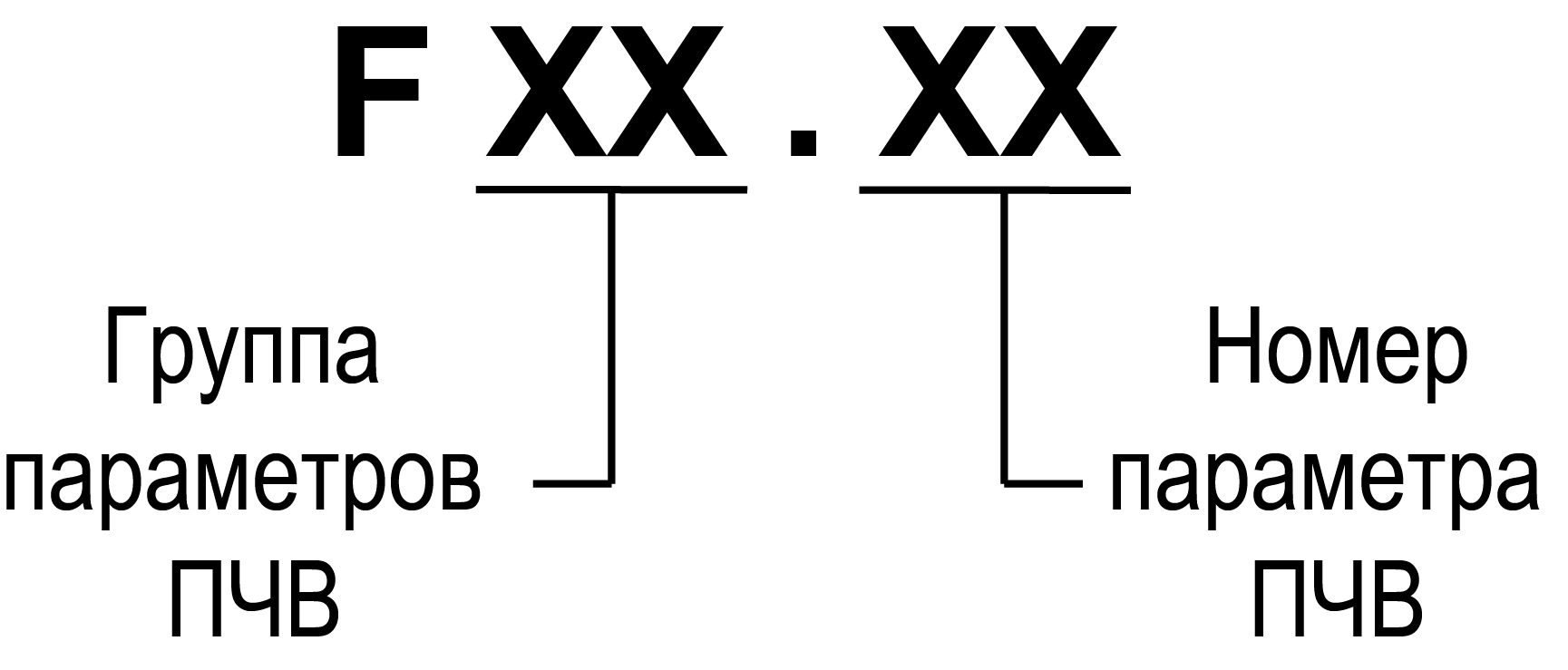 |
Пример
У параметра F01.05 номер группы параметров: 01, номер параметра: 05.
Следовательно, доступ к параметру F01.05 осуществляется через объект:
index = 0х2001 subindex = 0х06.
Для записи параметров в энергонезависимую память используются объекты в соответствии с таблицей.
Индексы и субиндексы для групп параметров ПЧВ при записи в энергонезависимую память
| Группа параметров ПЧВ | Index | Subindex |
|---|---|---|
F00 – F15 | 0х20f0 – 0х20ff соответственно | Subindex = 1+ номер параметра |
F16 – F31 | 0х20a0 – 0х20af соответственно |
Чтение и запись параметров через SDO
Команда чтения параметра через SDO
| Поле | Данные | Описание |
|---|---|---|
ID | 0x600 + NodeID | Идентификатор, содержащий адрес устройства (NodeID) |
RTR | 0 | |
Data0 | 0x40 | Команда на чтение |
Data1 | Index, младший байт | |
Data2 | Index, старший байт | |
Data3 | Subindex | |
Data4 – Data7 | Резерв |
Ответ на команду чтения
| Поле | Данные | Описание |
|---|---|---|
ID | 0x580 + NodeID | Идентификатор, содержащий адрес устройства (NodeID) |
RTR | 0 | |
Data0 | 0x43 0x4b 0x4f 0x80 | 0x43 – успешно, 4 байта данных 0x4b – успешно, 2 байта данных 0x4f – успешно, 1 байт данных 0x80 – ошибка чтения |
Data1 | Index, младший байт | |
Data2 | Index, старший байт | |
Data3 | Subindex | |
Data4 – Data7 | Данные или код ошибки (Data4 – младший байт, Data7 – старший байт) | Коды ошибок – см. таблицу |
Команда записи параметра через SDO
| Поле | Данные | Описание |
|---|---|---|
ID | 0x600 + NodeID | Идентификатор, содержащий адрес устройства (NodeID) |
RTR | 0 | |
Data0 | 0x23 0x2b 0x2f | 0x23 – запись 32 бита 0x2b – запись 16 бит 0x2f – запись 8 бит |
Data1 | Index, младший байт | |
Data2 | Index, старший байт | |
Data3 | Subindex | |
Data4 – Data7 | Данные (Data4 – младший байт, Data7 – старший байт) |
Ответ на команду записи
| Поле | Данные | Описание |
|---|---|---|
ID | 0x580 + NodeID | Идентификатор, содержащий адрес устройства (NodeID) |
RTR | 0 | |
Data0 | 0x60 0x80 | 0x60 – успешно 0x80 – ошибка |
Data1 | Index, младший байт | |
Data2 | Index, старший байт | |
Data3 | Subindex | |
Data4 – Data7 | В случае ошибки записи – код ошибки (Data4 – младший байт, Data7 – старший байт) Если запись успешна – 0 (нет ошибок) | Коды ошибок – см. таблицу |
Коды ошибок
| Код (hex) | Описание |
|---|---|
0х05040000 | Превышен таймаут |
0х05040001 | Неверная команда SDO |
0х06010002 | Запись в объект, доступный только для чтения |
0х06020000 | Объект не найден |
0х06040041 | Объект невозможно назначить в PDO |
0х06040042 | Длина PDO превышает допустимую |
0х06070010 | Несуществующий тип данных |
0х06090011 | Subindex не существует |
0х06090030 | Значение вне допустимого диапазона |
0х08000000 | Неизвестная ошибка |
0х08000020 | Невозможно изменить данные в текущем состоянии |
Примеры чтения и записи параметров ПЧВ через SDO приведены ниже.
Пример
Чтение параметра ПЧВ F02.02 (адрес 0х0202):
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x602 | 0 | 40 02 20 03 00 00 00 00 |
Ответ ПЧВ:
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x582 | 0 | 4b 02 20 03 00 00 00 00 |
Пример
Запись значения 3 в параметр ПЧВ F02.02 (адрес 0х0202):
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x602 | 0 | 2b 02 20 03 03 00 00 00 |
Пример
Чтение параметра ПЧВ C00.26 с адресом 0x211A (номинальное напряжение ПЧВ):
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x602 | 0 | 40 21 20 1b 00 00 00 00 |
Ответ ПЧВ:
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x582 | 0 | 4b 21 20 1b dc 00 |
Пример
Чтение коммуникационных переменных (на примере адреса 0x3006):
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x602 | 0 | 40 30 20 07 00 00 00 00 |
Ответ ПЧВ:
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x582 | 0 | 4b 30 20 07 00 00 |
Пример
Запись коммуникационных переменных (на примере адреса 0x3006, значение 100):
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x602 | 0 | 2b 30 20 07 64 00 |
Ответ ПЧВ:
| Идентификатор | RTR | Данные (hex) |
|---|---|---|
0x582 | 0 | 60 30 20 07 |
Обмен данными через PDO
Принимаемый объект данных процесса (RPDO)
RPDO – данные, периодически записываемые в преобразователь частоты.
Доступны 4 RPDO, в которых могут быть отображены коммуникационные переменные (адреса 0х3000), доступные для записи.
Суммарная длина переменных в каждом RPDO не должна превышать 8 байт.
Передаваемый объект данных процесса (TPDO)
TPDO – данные, периодически считываемые из преобразователя частоты. Доступны 4 TPDO, в которых могут быть отображены параметры группы C00. Суммарная длина переменных в каждом TPDO не должна превышать 8 байт.
Момент отправки данных в зависимости от типа отправки указан в таблице.
Момент отправки данных PDO
Тип отправки данных | Момент отправки данных |
|---|---|
Cyclic synchronization (тип 0) | При приеме команды SYNC |
Cyclic synchronization (тип 1 – 240) | При приеме команды SYNC с соответствующим шагом синхронизации |
Asynchronous (тип 252) | Не поддерживается |
Asynchronous – vendor specified (тип 254) | При изменении данных |
Asynchronous (тип 255) | При изменении данных, либо при истечении времени event time, но не чаще одного раза в течение времени suppression time. |
Данные, отображаемые по умолчанию
Отображаемые по умолчанию данные
PDO | Тип отправки | Длительность event time | Параметр 1 | Параметр 2 | Параметр 3 | Параметр 4 |
|---|---|---|---|---|---|---|
RPDO1 | 255 | 100 мс | Команда (0х3001) | Задание частоты х0,01 Гц (0х3000) | Задание момента х0,1 % (0х3000) | |
TPDO1 | 255 | 100 мс | Состояние ПЧВ (0х3002) | Выходной ток х0,1 А (С00.02) | Выходная частота х0,01 Гц (С00.01) | Скорость двигателя х1 об/мин С00.05 |
TPDO2 | 255 | 100 мс | Выходная мощность х0,1 % (С00.10) | Входное напряжение х0,1 В (С00.03) | Код ошибки (0х3003) | |
TPDO3 | 255 | 100 мс | Выходной момент х0,1 % (С00.07) | Напряжение на шине DC х0,1 В (С00.11) | Выходное напряжение х0,1 В (С00.04) | Температура ПЧВ х0,1 °С С00.12 |
Формат команды
| Команда | Описание |
|---|---|
0 | Нет команды |
1 | Пуск вперед |
2 | Пуск назад |
3 | Пуск в толчковом режиме вперед |
4 | Пуск в толчковом режиме назад |
5 | Останов с замедлением |
6 | Останов с выбегом |
7 | Сброс ошибки |
8 | Запрет запуска |
9 | Разрешение запуска |
Формат слова состояния
| Бит | Описание |
|---|---|
0 | 0: остановлен 1: запущен |
1 | 0: нет разгона 1: разгон |
2 | 0: нет замедления 1: замедление |
3 | 0: вперед 1: назад |
4 | 0: нет аварии 1: авария |
5 | Резерв |
6 | 0: нет предупреждения 1: предупреждение |
7 | 0: не готов 1: готов |
14 | Состояние бита меняется на противоположное при каждой отправке сообщения |
Сообщение об ошибке
При возникновении аварии, преобразователь частоты отправляет аварийное сообщение. Формат аварийных сообщений приведен в таблице.
Формат сообщений, отправляемых при возникновении аварии
| Поле | Данные |
|---|---|
Идентификатор (COB ID) | 0x80 + NodeID |
Data0 – Data1 | Код ошибки |
Data2 | Регистр ошибки |
Data3 – Data7 | Код ошибки производителя |
Поля “Код ошибки” и “Код ошибки производителя” совпадают и содержат код аварии ПЧВ. Поле “Регистр ошибки” содержит слово ошибок в соответствии с профилем стандарта DS 301 (протокол CANopen), объект 0х1001 (см. таблицу). | |
Регистр ошибок (объект 0х1001 профиля стандарта DS 301)
| Описание | Последняя ошибка |
| Тип данных | UINT8 |
| Доступ | Только для чтения |
| Значение по умолчанию | 0х0 |
| EEPROM | Не сохраняется |
| Значения | Установленный бит соответствует обнаруженной ошибке: Бит 4: ошибка связи Бит 5: ошибка по протоколу NodeGuard Бит 7: ошибка памяти EEPROM |