- AI/AO (Analog Input/Output) – аналоговый вход/выход.
- DI/DO (Digital Input/Output) – цифровой вход/выход.
- Modbus – открытый промышленный протокол обмена, разработанный компанией Modicon. В настоящий момент поддерживается независимой организацией Modbus-IDA (www.modbus.org).
- OwenCloud – облачный сервис компании «ОВЕН», применяемый для удаленного мониторинга, управления и хранения архивов данных приборов, используемых в системах автоматизации. Доступ к сервису осуществляется с помощью web-браузера или мобильного приложения (подробнее см. owen.ru/owencloud).
- Owen Configurator – программное обеспечение для настройки и задания параметров устройствам компании «ОВЕН» (owen.ru/soft/owen_configurator).
- ВИП – встроенный источник питания.
- ВУ – выходное устройство.
- ДН – датчик напряжения.
- ДТ – датчик тока.
- КВ – концевой выключатель.
- КЗ – короткое замыкание.
- МВ – моментный выключатель.
- ПВ – продолжительность включения.
- ПК – персональный компьютер.
- ПО – программное обеспечение.
Руководство по эксплуатации
Используемые термины и аббревиатуры
Введение
Настоящее Руководство по эксплуатации предназначено для ознакомления обслуживающего персонала с устройством, принципом действия, конструкцией, технической эксплуатацией и обслуживанием пускателя бесконтактного реверсивного ПБР10А (в дальнейшем по тексту именуемого «прибор», «пускатель»).
Подключение, настройку и техобслуживание прибора должны проводить только квалифицированные специалисты после прочтения настоящего руководства по эксплуатации.
Прибор изготавливается в различных модификациях, указанных в коде полного условного обозначения:
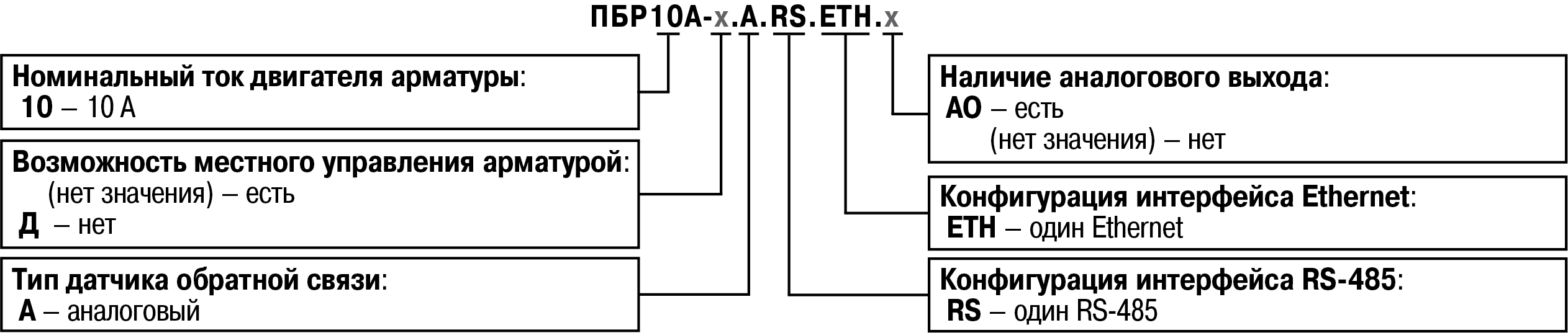
Пускатели модификаций ПБР10А-A.RS.ETH.х имеют OLED-дисплей и кнопки на лицевой панели. Это дает возможность работать не только в автоматическом (по сигналу с выбранного в настройках интерфейса), но и в ручном (посредством кнопок) режимах. Настройка прибора осуществляется с дисплея и с помощью Owen Configurator.
Пускатели модификаций ПБР10А-Д.A.RS.ETH.х не оснащены дисплеем и кнопками на лицевой панели. Управление электродвигателем осуществляется по сигналу с выбранного в настройках интерфейса, а настройка прибора – только посредством Owen Configurator.
Назначение и функции
Пускатель предназначен для управления и защиты электрических исполнительных механизмов запорной, регулирующей или запорно-регулирующей арматуры, имеющих в своем составе трехфазные асинхронные или синхронные двигатели либо однофазные конденсаторные двигатели переменного тока.
Основные функции прибора:
реверсивное управление электродвигателем (вручную или автоматически);
плавный разгон электродвигателя;
контроль состояния электродвигателя, пускателя, а также электрической сети;
отключение электродвигателя в случае возникновения аварий;
поддержка основных режимов работы запорно-регулирующей арматуры;
ВИП 24 В;
сохранение журнала событий;
разделение уровней доступа к настройке через меню (для модификаций с дисплеем);
индикация режимов работы;
возможность отслеживания параметров работы через облачный сервис OwenCloud;
управление электродвигателем по нескольким интерфейсам (AI, DI, RS-485, Ethernet, USB);
настраиваемые функции DI;
возможность отслеживания положения запорной арматуры через AO (при наличии), RS-485, Ethernet, USB.
Контроль состояния пускателя:
исправность силовых ключей;
перегрев;
защита от превышения тока;
максимальная токовая защита;
исправность USB.
Контроль состояния электродвигателя:
подключение двигателя;
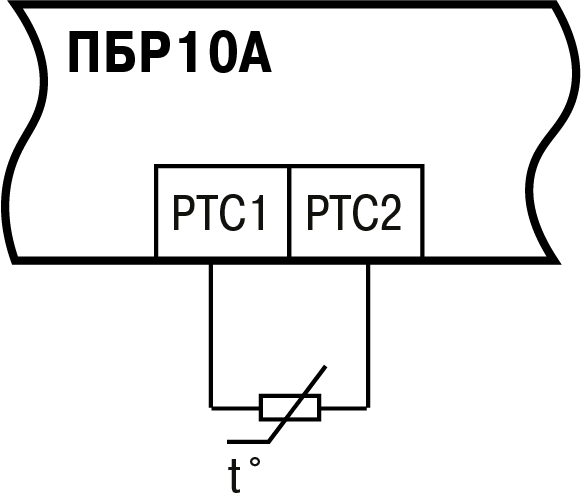
перегрев двигателя по току или PTC-датчику;
наработка в часах;
количество пусков в час;
общее количество пусков электродвигателя.
Контроль состояния электрической сети:
автоматическое определение чередования фаз;
автоматическое определение частоты сети;
защита от повышенного/пониженного напряжения;
контроль дисбаланса токов и напряжений;
контроль отклонения частоты от нормы;
контроль обрыва фаз.
Основные режимы работы запорно-регулирующей арматуры:
калибровка времени полного хода;
переход в безопасное положение;
дожим;
аварийный стоп по внешнему сигналу;
определение положения запорной арматуры.
Технические характеристики и условия эксплуатации
Технические характеристики
Характеристики прибора
Параметр | Значение | |
|---|---|---|
Питание | ||
Напряжение питания цепи управления | 230 В (+10/–15 %) | |
Номинальное рабочее напряжение питания цепи управления | 230 В | |
Номинальная мощность потребления цепи управления, не более | 10 ВА | |
Частота питающего напряжения | 50 (± 5) Гц, 60 (± 5) Гц | |
Диапазон напряжений ВИП | ⎓19...29 В | |
Номинальное напряжение ВИП | ⎓24 В | |
Максимальный ток ВИП | 0,1 А | |
Гальваническая развязка | Есть см. схему гальванической развязки в полном Руководстве по эксплуатации, раздел 2.2 | |
Нагрузка | ||
Рабочее напряжение главной цепи | 3 × 400 В, 3 × 230 В, 1 × 230 В (–15...+10 %) | |
Номинальное рабочее напряжение главной цепи | 3 × 400 В, 3 × 230 В, 1 × 230 В | |
Количество каналов измерения напряжения | 3 | |
Диапазон измерения RMS фазного напряжения | 0…265 В | |
Количество каналов измерения тока | 3 | |
Диапазон измерения RMS тока | 0…10,5 А | |
Диапазон измерения частоты первой гармоники напряжения | 47…63 Гц | |
Разрешающая способность: • фазное напряжение RMS • ток фазы RMS • частота первой гармоники |
1 В 0,1 А 0,1 Гц | |
Основная приведенная погрешность измерения: • фазного напряжения RMS • тока фазы RMS • частоты первой гармоники |
1 % 1 % 0,5 % | |
Дополнительная приведенная погрешность преобразования, не более: • вызванная влиянием электромагнитных помех • вызванная изменением температуры в пределах рабочего диапазона на каждые 10 °С |
0,5 % от диапазона
0,5 % от диапазона | |
Максимальный рабочий ток | 10 А | |
ПВ электродвигателя | 100 %; 25 % (не более 630 включений в час) | |
Предельная нагрузка по току I2t (t = 10 мс) | 380 A2с | |
Аналоговый вход | ||
Количество | 2 | |
Тип входов | Универсальный (0–10 В, 2–10 В, 0–20 мА, 4–20 мА, 0–5 мА) | |
Основная приведенная погрешность, не более: • для диапазона 0–5 мА • для остальных диапазонов |
2,0 % 0,5 % | |
Номинальное значение входного импеданса: • в режиме «напряжение» • в режиме «ток» |
≥ 10000 Ом ≤ 300 Ом | |
Дополнительная приведенная погрешность преобразования, не более: • вызванная влиянием электромагнитных помех • вызванная изменением температуры в пределах рабочего диапазона на каждые 10 °С |
0,5 % от диапазона
0,5 % от диапазона | |
Дискретный вход | ||
Количество | 5 | |
Тип входов | Цифровой | |
Минимальная длительность импульса | 1 мс | |
Напряжение: • «логической единицы» • «логического нуля» |
15...30 В –3...+5 В | |
Ток: • «логической единицы» • «логического нуля» |
≤ 10 мА ≤ 1 мА | |
Вход для подключения PTC-датчика двигателя | ||
Количество | 1 | |
Тип подключаемых датчиков | Защитный ptc-термистор (по DIN 44081 и 44082) | |
Порог определения аварии: • «КЗ датчика» • «Перегрев двигателя» |
≤ 20 Ом ≥ 2000 Ом | |
Аналоговый выход (только для модификаций ПБР10А-А.RS.ETH.АО) | ||
Количество | 1 | |
Тип выхода | Универсальный (0–1 В, 0–10 В, 0–20 мА, 4–20 мА) | |
Внешняя нагрузка | не менее 2000 Ом (для режима «напряжение»); не более 500 Ом (для режима «ток») | |
Основная приведенная погрешность | 0,5 % | |
Дополнительная приведенная погрешность преобразования, не более: • вызванная влиянием электромагнитных помех • вызванная изменением температуры в пределах рабочего диапазона на каждые 10 °С |
0,5 % от диапазона
0,5 % от диапазона | |
Дискретный выход | ||
Количество | 1 | |
Тип выхода | Релейный, нормально открытый | |
Тип нагрузки | Резистивная | |
Максимальный коммутируемый ток | 1 А | |
Максимальное коммутируемое напряжение | =30 В; ~24 В | |
RS-485 | ||
Максимальная скорость обмена | 115200 бит/с | |
Максимальная длина линии связи | 1200 м | |
Протокол обмена | Modbus RTU (Slave) | |
Количество ошибок обмена, не более: • при нормальных условиях • под влиянием электромагнитных помех |
1 % 1 % | |
Ethernet | ||
Скорость обмена | 10/100 Мбит/с | |
Протокол обмена | Modbus TCP | |
Тип разъема | RJ-45 | |
Максимальная длина линии связи | 100 м | |
Количество ошибок обмена, не более: • при нормальных условиях • под влиянием электромагнитных помех |
1 % 1 % | |
USB | ||
Стандарт | USB 2.0 | |
Режим работы | Full speed (до 12 Мбит/с) | |
Тип разъема | Micro-USB | |
Максимальная длина линии связи | 1,8 м | |
Корпус | ||
Степень защиты корпуса по ГОСТ 14254 | IP20 | |
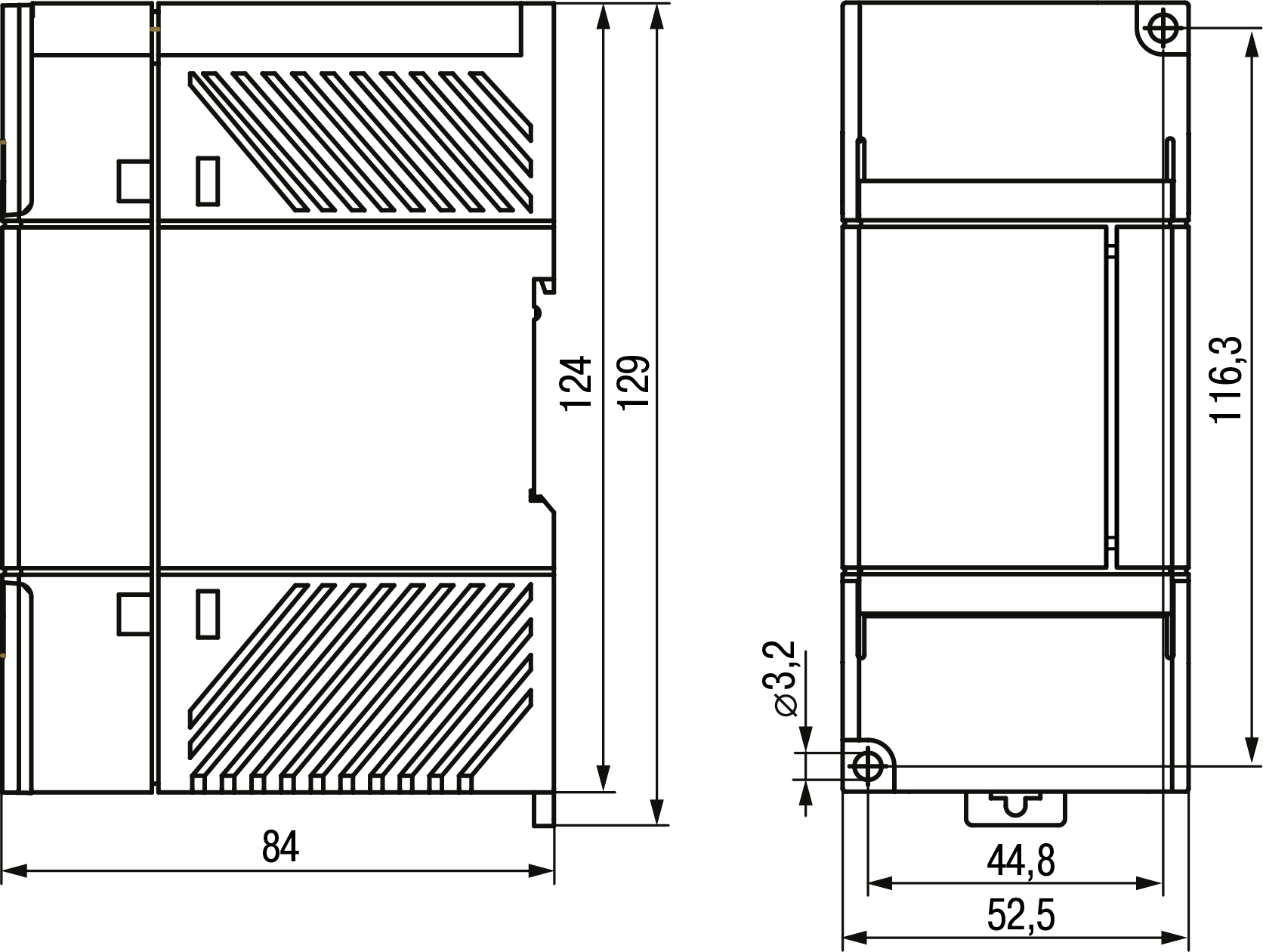
Габаритные размеры | 124 × 84 × 52,5 мм | |
Масса прибора: • без упаковки • в упаковке |
0,6 кг 0,65 кг | |
Общее | ||
Время установления рабочего режима | 10 с | |
Абсолютная погрешность часов реального времени | ±10 с/сутки | |
Средний срок службы | 10 лет | |
Средняя наработка на отказ | 100000 часов | |
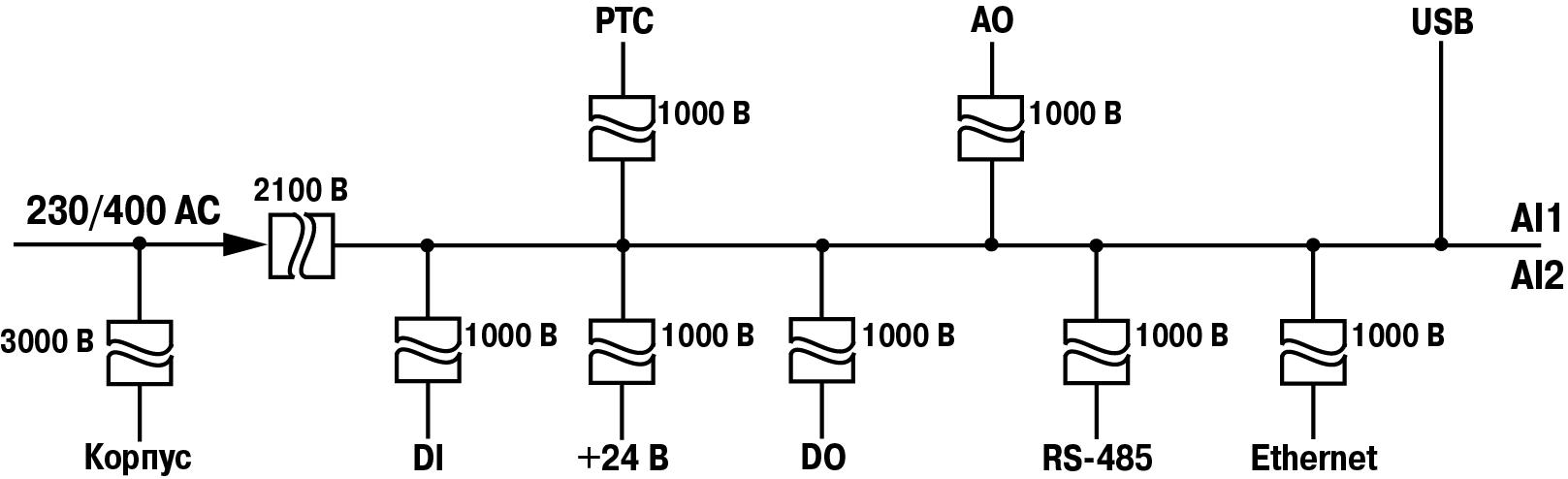
Изоляция узлов прибора
Схема гальванически изолированных узлов и прочность гальванической изоляции приведены на рисунке.
Условия эксплуатации
Прибор предназначен для эксплуатации в следующих условиях:
- закрытые взрывобезопасные помещения без агрессивных паров и газов;
- температура окружающего воздуха:
от минус 25 до +70 °С – при ПВ 25 %;
от минус 25 до +65 °С – при ПВ 100 %;
- верхний предел относительной влажности воздуха: не более 80 % при +25 °С и более низких температурах без конденсации влаги;
- атмосферное давление от 84 до 106,7 кПа.
По устойчивости к электромагнитным воздействиям и по уровню излучаемых радиопомех прибор соответствует оборудованию класса А по ГОСТ IEC 60947-4-2.
Меры безопасности
На клеммнике прибора присутствует опасное для
жизни напряжение. Любые подключения к прибору и работы по его техническому
обслуживанию следует производить только при отключенном питании прибора
и всех подключенных к нему устройств.
По способу защиты от поражения электрическим током прибор соответствует классу I по ГОСТ 12.2.007-0.
Во время эксплуатации и технического обслуживания следует соблюдать требования:
ГОСТ 12.3.019;
Правил эксплуатации электроустановок потребителей;
Правил охраны труда при эксплуатации электроустановок.
Не допускается попадание влаги на контакты разъемов и внутренние электроэлементы прибора. Прибор запрещено использовать в агрессивных средах с содержанием в атмосфере кислот, щелочей, масел и т. п.
Монтаж
Пускатель предназначен для крепления на стену или DIN-рейку.
Габаритные и установочные размеры прибора приведены на рисунке.
Для установки пускателя следует:
Подготовить место для установки прибора.
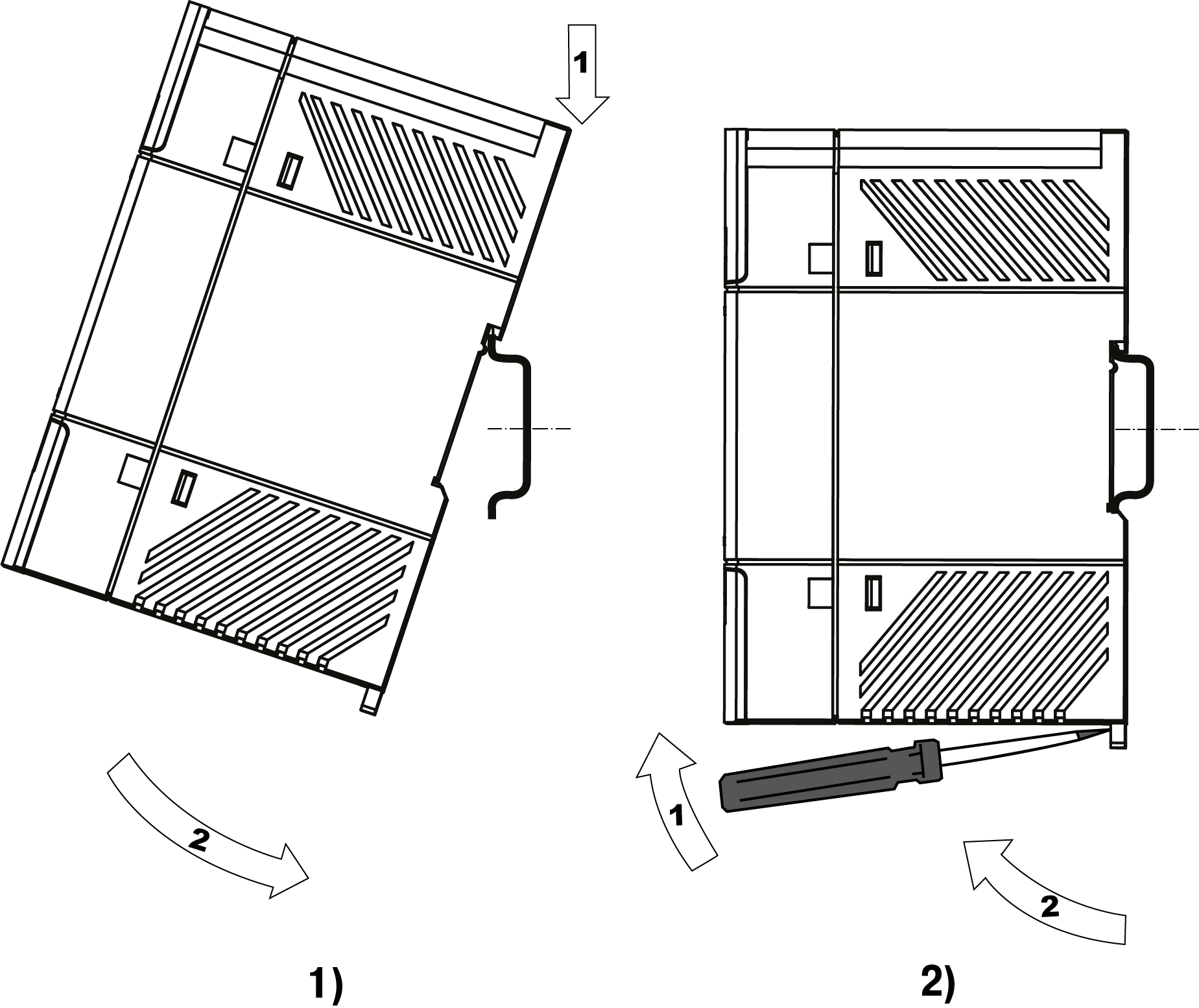
Убедиться в наличии свободного пространства вокруг прибора для удобства подключения и прокладки проводов, а также в правильности расположения пускателя (см. рисунок).
Закрепить прибор на DIN-рейке (см. рисунок) или на вертикальной поверхности с помощью винтов (в комплект поставки не входят).
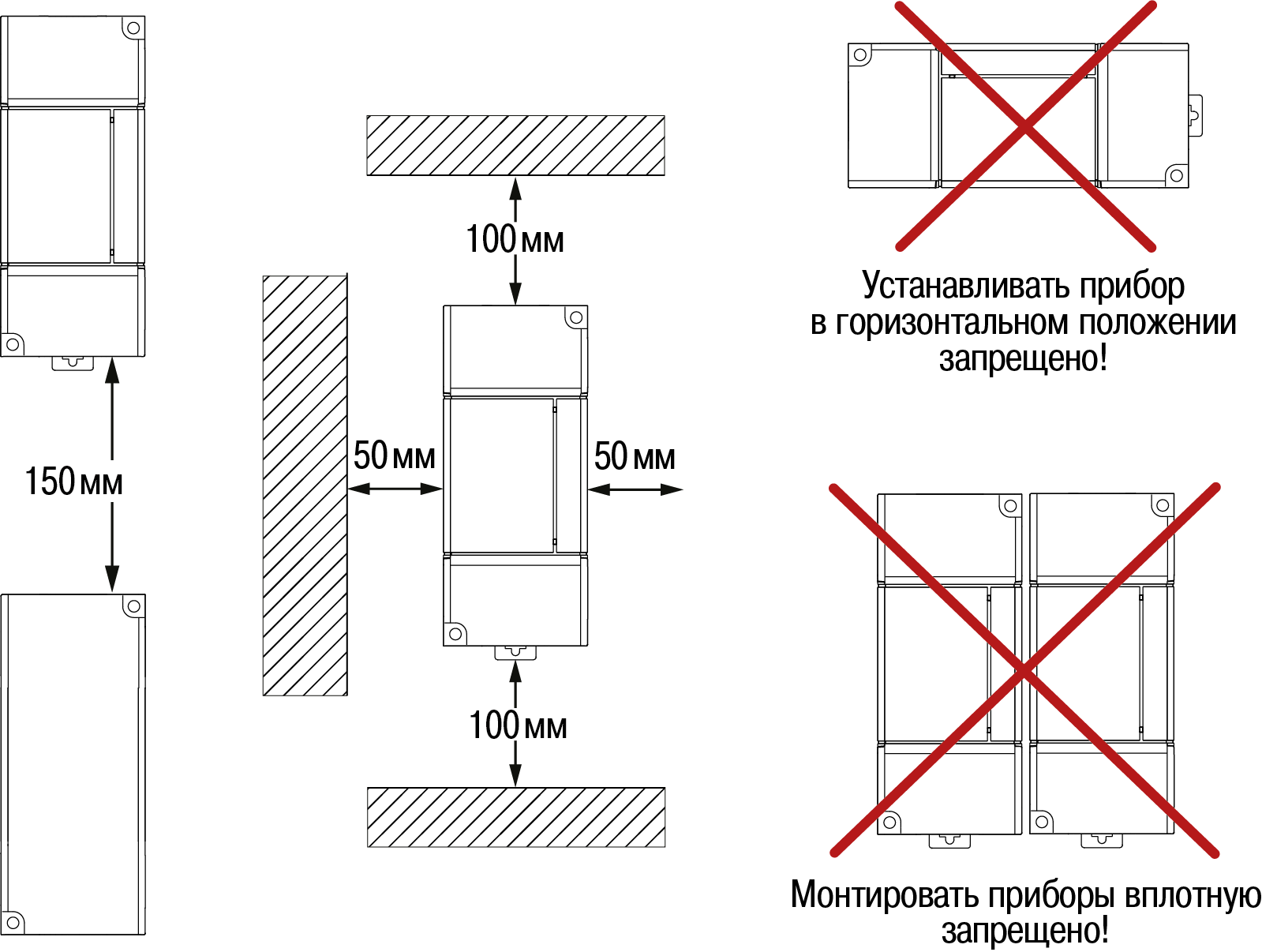
Чтобы избежать перегрева, пускатели не рекомендуется монтировать один под другим. Если условие невыполнимо, то приборы следует устанавливать со смещением.
Подключение
Рекомендации по подключению
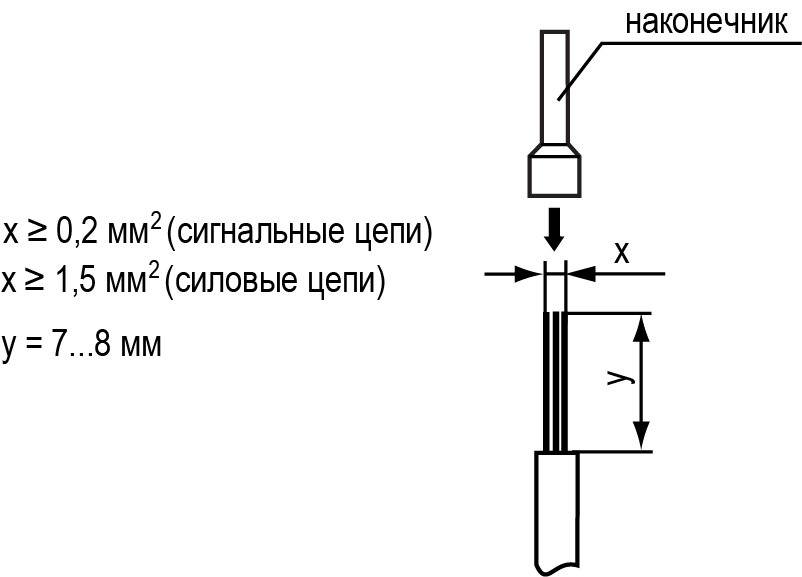
Для обеспечения надежности электрических соединений следует использовать медные кабели и провода с многопроволочными жилами. Концы проводов следует зачистить. Многопроволочные жилы следует залудить или использовать кабельные наконечники.
Требования к сечениям жил кабелей указаны на рисунке.
Рекомендации по прокладке линий соединений:
- сигнальные цепи следует выделить в самостоятельную трассу (или несколько трасс) и расположить ее (или их) отдельно от силовых кабелей и от кабелей, создающих высокочастотные и импульсные помехи;
- для защиты входов прибора от влияния промышленных электромагнитных помех сигнальные цепи следует экранировать. В качестве экранов могут быть использованы специальные кабели с экранирующими оплетками и заземленные стальные трубы подходящего диаметра. Экраны кабелей с экранирующими оплетками следует подключить к контакту функционального заземления (FE) в щите управления. Заземляющие линии следует прокладывать по схеме «звезда» с обеспечением хорошего контакта.
Назначение контактов клеммника
Назначение контактов клеммной колодки прибора представлено на рисунке.
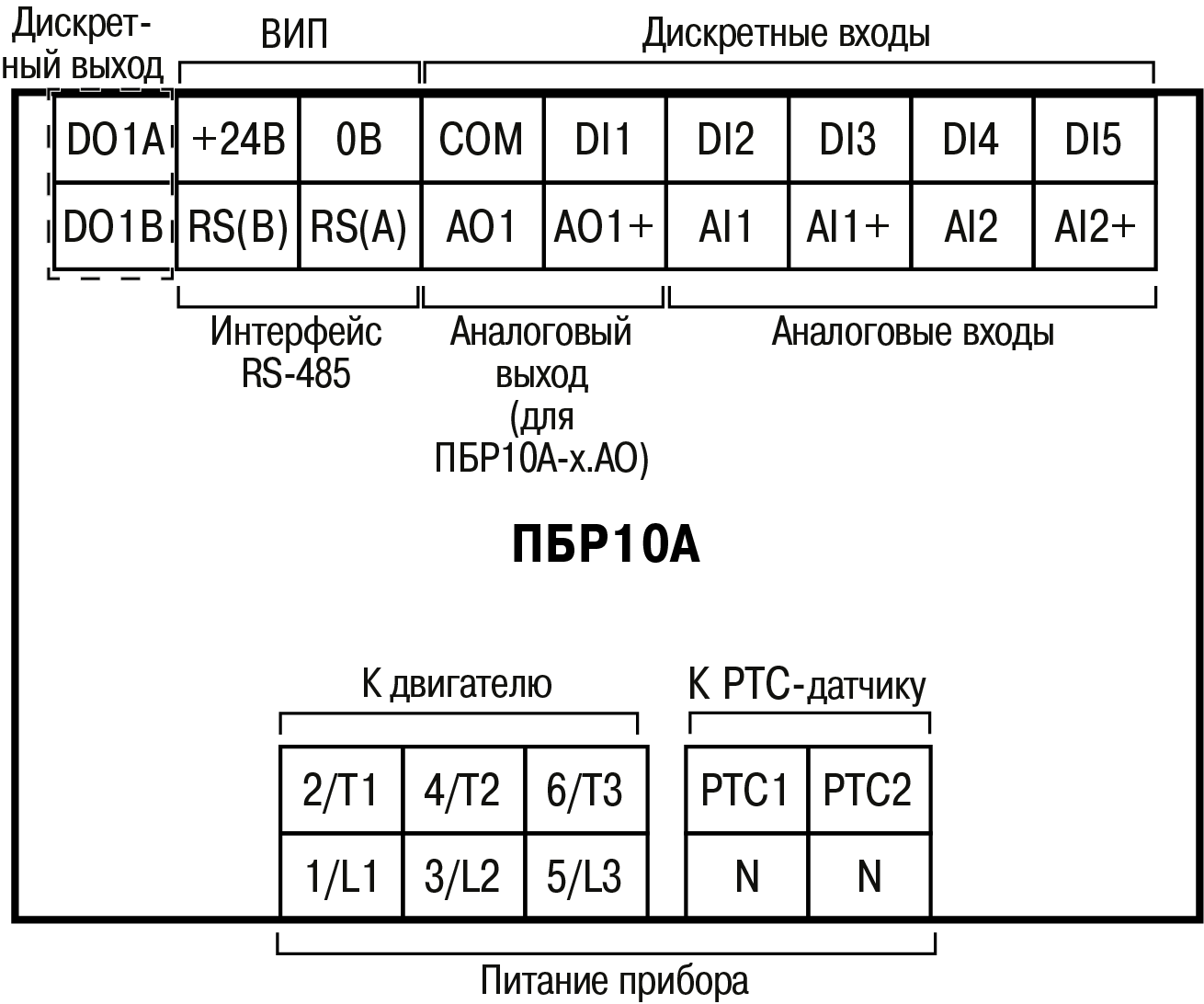
Аналоговый выход есть только у модификаций ПБР10А-х.АО.
Порядок подключения
После распаковки следует убедиться, что во время транспортировки прибор не был поврежден.
Подключения к прибору следует производить только при отключенном питании прибора и всех подключенных к нему устройств.
Если прибор находился длительное время при температуре ниже рабочего диапазона, то перед включением и началом работ необходимо выдержать его в помещении с температурой, соответствующей рабочему диапазону, не менее 30 минут.
Для подключения прибора следует:
Открыть верхнюю и нижнюю крышки прибора.
Подключить питание прибора
Подключить электродвигатель арматуры и защитный РТС-датчик (если есть).
Подключить необходимые сигнальные входы/выходы.
Закрыть крышки.
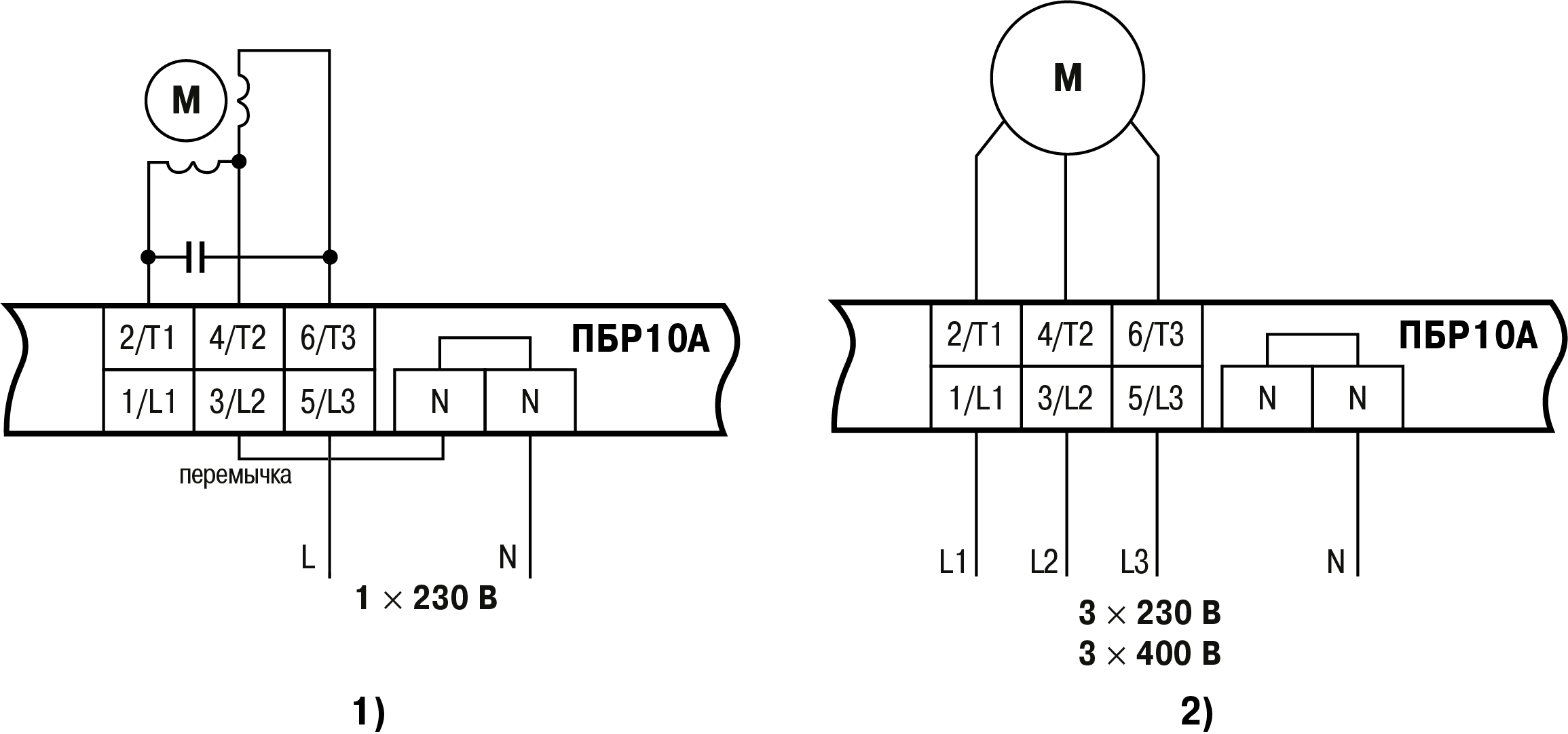
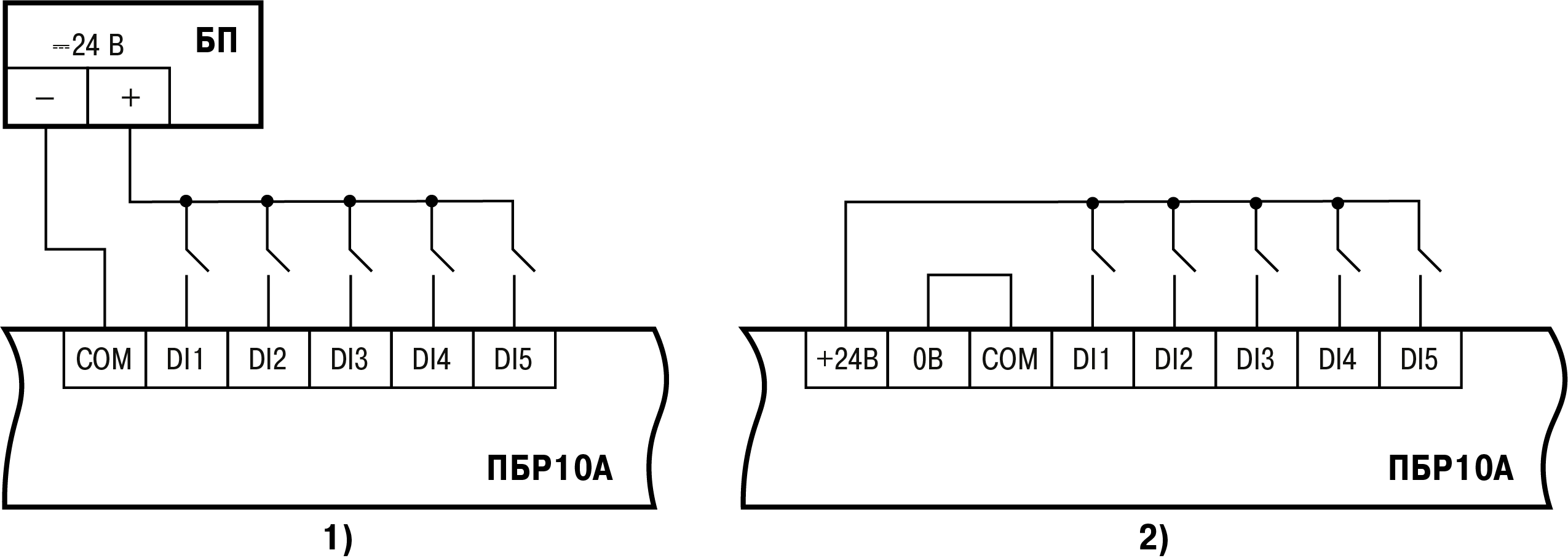
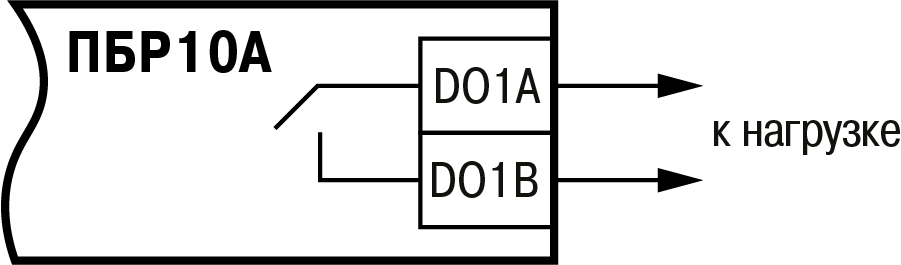
Схемы подключения
Схемы подключения к прибору представлены на рисунках –.
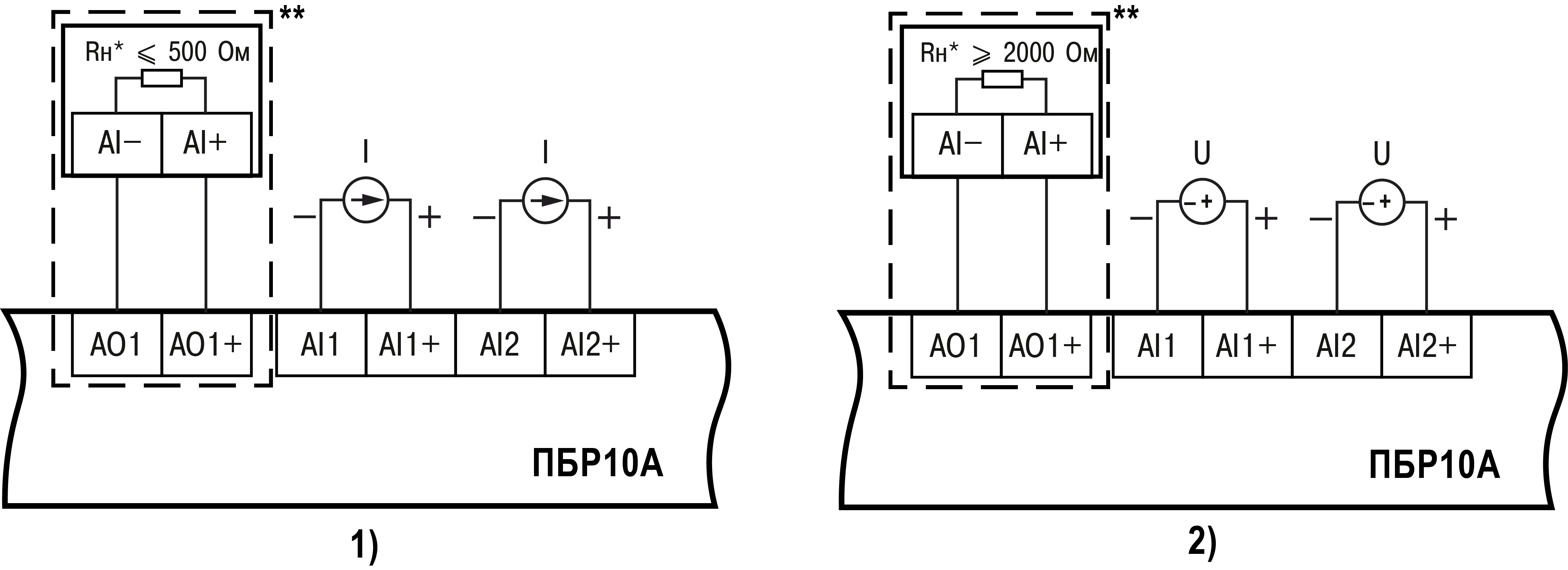
* Rн – нагрузочное сопротивление прибора приемника сигнала.
** Опционально.
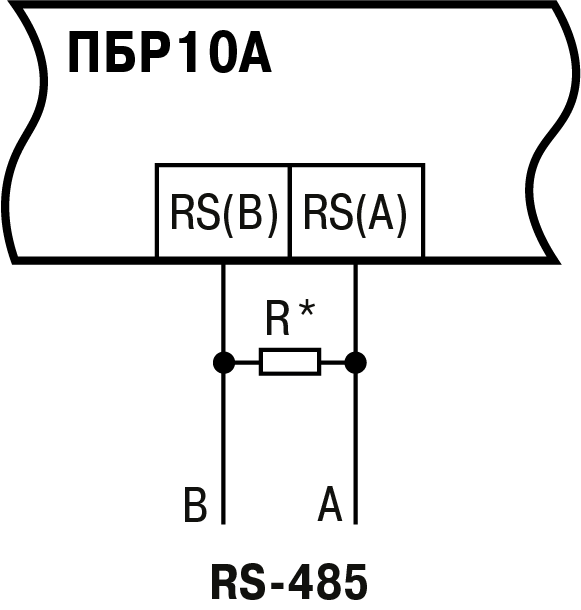
* Согласующие резисторы R устанавливаются в наиболее удаленных точках сети RS-485.
Сопротивление согласующих резисторов должно равняться волновому сопротивлению используемого кабеля.
Эксплуатация
Принцип работы
Функциональная схема прибора представлена на рисунке.
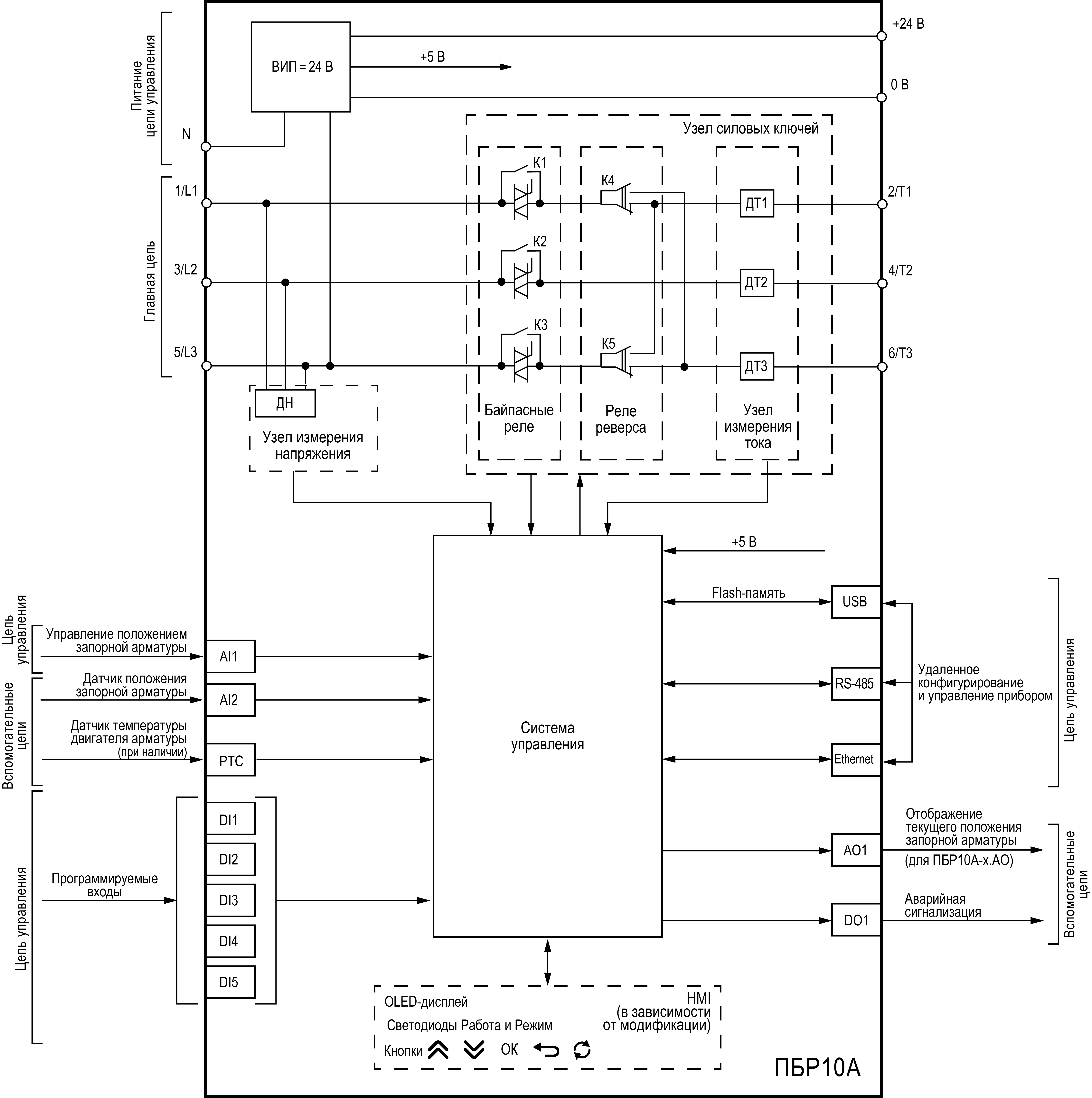
Принцип управления электроприводом арматуры заключается в следующем.
При получении команд на изменение положения арматуры прибор определяет необходимое направление движения арматуры и соответствующим образом коммутирует реле реверса.
Далее производится плавный пуск электродвигателя арматуры посредством изменения угла управления силовыми симисторами (время пуска 100 мс).
После разгона электродвигателя подключаются байпасные реле и переводят двигатель на работу от сети для снижения тепловых потерь в приборе.
При достижении арматурой требуемого положения напряжение с электродвигателя снимается и арматура останавливается. Положение арматуры контролируется по концевым выключателям и времени или по аналоговому датчику положения.
Управление и индикация
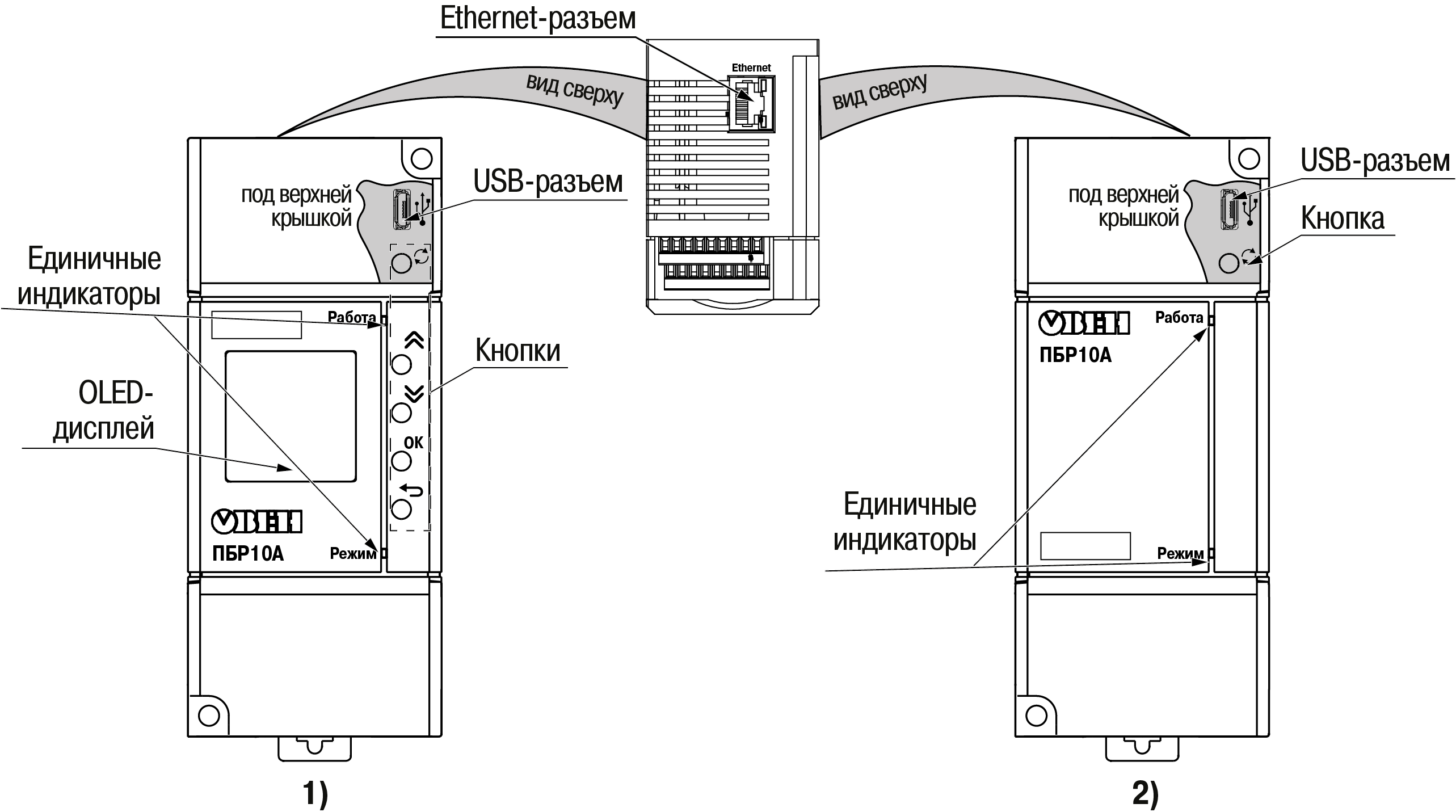
На лицевой панели в зависимости от модификации прибора расположены (см. рисунок):
OLED-дисплей;
два единичных индикатора (см. таблицу);
пять кнопок (см. таблицу);
USB-разъем;
Ethernet-разъем.
Назначение световых индикаторов
| Индикатор | Цвет свечения | Состояние | Значение |
|---|---|---|---|
Работа (текущее состояние прибора и арматуры) | Зеленый (работа) | Светится | Прибор функционирует нормально, запорная арматура перемещается |
Желтый (готовность) | Светится | Прибор включен, аварий нет, сигналы управления не поступают (арматура не перемещается) | |
Красный (авария) | Светится | Сработала авария (подробнее см. таблицу) | |
Мигает | Попытка сбросить статус аварии при наличии ее признака | ||
Режим (активный режим работы прибора) | Зеленый (автоматический режим) | Светится | Автоматический режим управления запорной арматурой (по сигналу с выбранного в настройках интерфейса прибора) |
Красный (ручной режим) | Светится | Ручной режим управления запорной арматурой посредством кнопок прибора (только для модификаций ПБР10А-А.х) | |
Работа и Режим | Красный | Мигают синхронно | Переход в режим загрузчика для обновления ПО по USB |
Кнопки предназначены для настройки прибора и управления арматурой.
Когда цифровой индикатор (дисплей) погашен, нажатие на любую из кнопок приводит к «пробуждению» дисплея, последующие нажатия приводят к выполнению соответствующих им функций.
При бездействии в меню более 60 секунд происходит выход на рабочий экран.
При отсутствии нажатий на кнопки в течение 120 секунд дисплей гаснет.
Назначение кнопок (в зависимости от модификации прибора)
| Кнопка | Назначение | |
|---|---|---|
Для модификаций ПБР10А-А.х | ||
 , ,  | Навигация по меню настройки (циклический переход). Изменение значения параметра: переход на одну ступень вверх/вниз или увеличение/уменьшение. Открытие/закрытие запорной арматуры (пока кнопка зажата, арматура открывается/закрывается) – только в ручном режиме | |
 | Однократное нажатие | Вход в пункты меню. Вход в редактирование параметра или переход к редактированию следующего символа параметра |
| Удержание 2 с | Переход в меню. Выход из редактирования параметра с сохранением введенного значения | |
 | Однократное нажатие | Выход из подразделов меню в основные разделы. Выход из редактирования параметра без сохранения введенного значения |
| Удержание 2 с | Выход из меню | |
Для всех модификаций | ||
 | Однократное нажатие | Снятие аварийного статуса (если отсутствует признак аварии) |
| Удержание при включении прибора | Перевод прибора в режим загрузчика | |
Включение и работа
Чтобы облегчить поиск и настройку параметров, в квадратных скобках ([Х]) приведена ссылка на номер параметра в первом столбце таблицы.
Для подготовки прибора к первому включению следует:
Настроить положения датчиков обратной связи (КВ, аналоговый датчик положения, МВ) на запорной арматуре в соответствии с документацией на нее.
Подключить прибор (см. раздел).
Настроить параметры сети:
Настроить параметры двигателя:
Настроить в приборе необходимую конфигурацию датчиков:
выбрать тип датчика положения (параметр Датчик полож. [13]);
настроить сигнал МВ на один из DI при необходимости.
Настроить входы/выходы:
Убедиться, что движение запорной арматуры соответствует:
для ПБР10А-A.х – кнопкам
и ;для ПБР10А-Д.A.х – установленному значению параметра Управление арматурой.
Если не соответствует, то необходимо изменить значение параметра Черед. фаз [9].
Установить в параметре [14] значение времени хода арматуры в секундах либо провести калибровку полного хода (параметр [15]).
Для модификации ПБР10А-A.х – перейти в автоматический режим работы.
После подготовки прибора к первому включению можно работать с запорной арматурой в обычном режиме.
Прибор можно настроить по указанному алгоритму также через Owen Configurator.
Настройка
Сведения об экранах
Информация из данного раздела предназначена для модификаций ПБР10А-A.х (с дисплеем).
Во время запуска прибора отображается экран приветствия с логотипом компании, наименованием прибора и версией ПО.
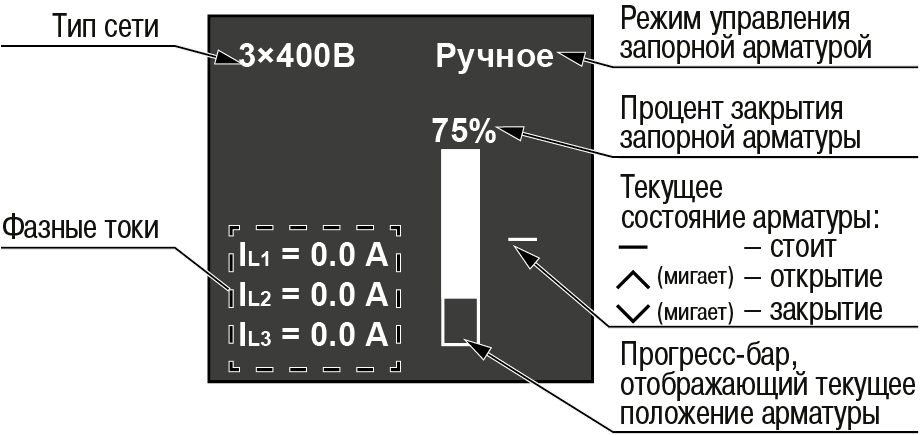
После включения отображается рабочий экран с основными рабочими параметрами (см. рисунок).
В случае возникновения аварии автоматически отображается экран аварий (рисунок). После сброса аварии экран аварий исчезает и отображается рабочий экран.
Экран аварий не отображается, если пользователь находится в меню.
Подробнее об авариях см. раздел.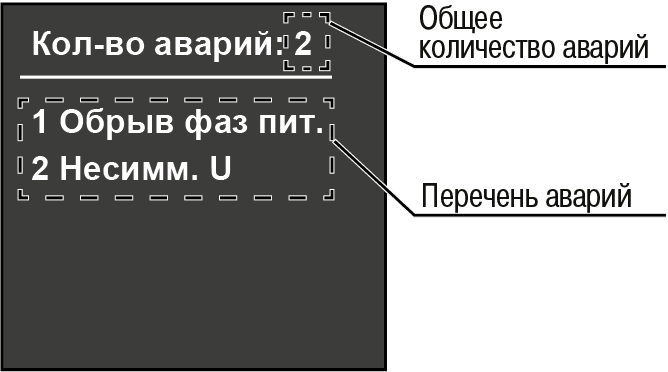
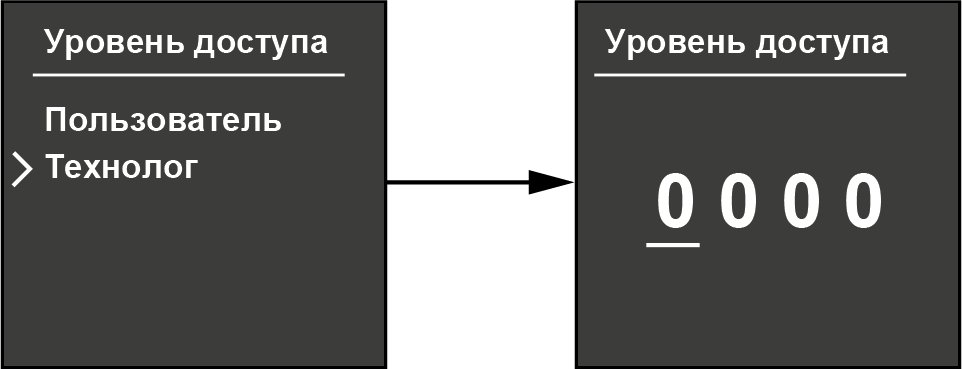
С рабочего экрана и экрана аварий можно перейти на экран меню. Перед входом в меню следует определиться с правами доступа (см. рисунок):
пользователь имеет доступ только к вкладкам Режим работы и Журнал, для изменения настроек прав нет;
технолог имеет доступ ко всем настройкам после ввода пароля.
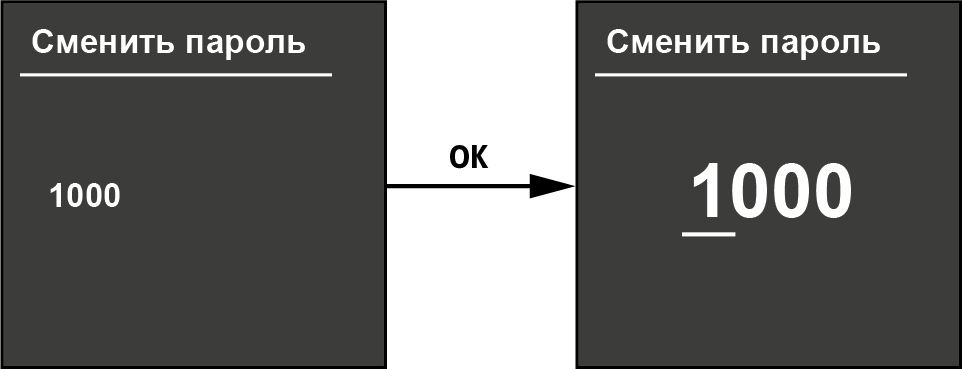
Заводской пароль доступа к настройкам 1000. В дальнейшем его можно сменить (раздел Сменить пароль экрана
меню).
На рисунке представлен пример перехода между экранами и разделами меню.
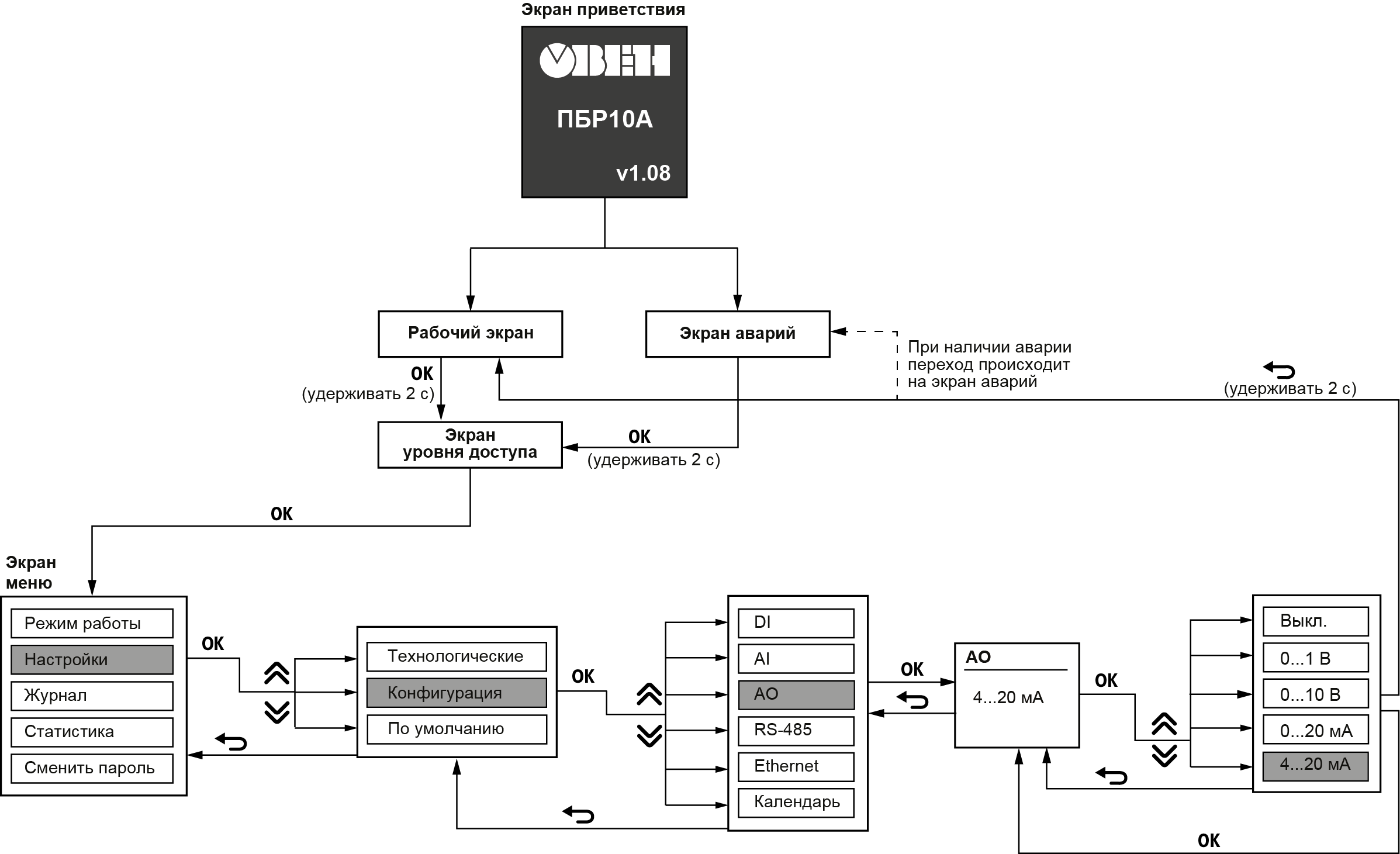
Экран меню содержит следующие разделы:
Режим работы;
Настройки;
Журнал;
Статистика;
Сменить пароль.
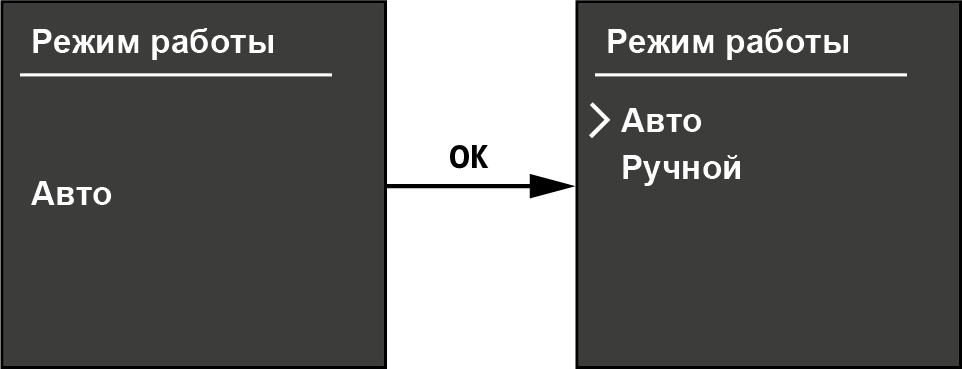
Режим работы
В данном разделе выбирается режим работы прибора (см. рисунок):
Авто – арматура управляется по сигналу с одного из интерфейсов: AI, DI, RS-485, Ethernet;
Ручной (установлен по умолчанию) – арматура управляется по сигналам с кнопок
и прибора.
Настройки
В разделе находятся настройки, отвечающие за режимы работы прибора и управляемой запорной арматуры, а также контролируемые параметры питающей сети. Подробнее о настройке прибора см. в разделе.
Журнал
В данном разделе (см. рисунок):
настраиваются параметры отображения журнала;
осуществляется просмотр журнала аварий (таблица) и рабочих состояний (таблица).
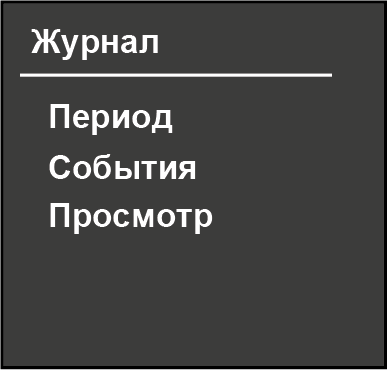
Назначение вкладок журнала:
Период – задается временной промежуток отображения журнала – от (ДД.ММ.ГГГГ ЧЧ:ММ:СС) и до (ДД.ММ.ГГГГ ЧЧ:ММ:СС).
События – выбирается тип события для отображения:
Раб. события (по умолчанию);
Аварии;
Все.
- Просмотр – просмотр выбранных типов событий (вначале отображаются более новые).
Объем журнала:
до 200 аварий;
до 17000 рабочих событий.
За выбранный период отображается последняя 1000 событий.
Информация из журнале событий для модификаций ПБР10А-Д.A.х (без дисплея) представлена в Приложении А.
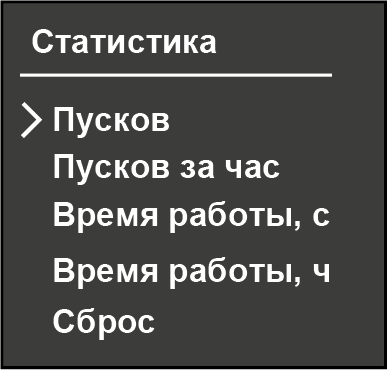
Статистика
В этом разделе указаны данные по статистике работы электродвигателя арматуры (см. рисунок):
количество пусков;
количество пусков в час;
время работы;
сброс статистики.
Сменить пароль
В данном разделе можно сменить пароль (см. рисунок).
Настройка параметров
Список параметров раздела «Настройка» и их допустимые значения представлены в таблице.
Заводские настройки выделены полужирным курсивом.
Чтобы облегчить поиск и настройку параметров, в квадратных скобках ([Х]) приведена ссылка на номер параметра в первом столбце таблицы.
Перечень параметров раздела «Настройка»
№ п/п | Параметр | Допустимые значения и заводская установка | Комментарий | ||
|---|---|---|---|---|---|
| Технологические | |||||
1 | Питание | U сети | Ном. значение | 1×230В 3×230В 3×400В | Тип питающей сети |
2 | Отклонение | Полож. (1…10 %) Отриц. (1…15...30 %) | Допустимое отклонение напряжения питающей сети от указанной в параметре Ном. значение [1] величины | ||
3 | Несимметрия U | 2…5...20 % | Несимметрия напряжений питающей сети. Параметр
учитывается только при питании от трехфазной сети | ||
4 | f сети | Отклонение | 0.2…3.0...5.0 Гц | Допустимое отклонение частоты питающего напряжения от стандартной. Стандартная частота определяется автоматически: 50 или 60 Гц | |
5 | Двигатель | Ток | Ном. значение | 0.1…10.0 А | Номинальный ток (среднеквадратичное значение) двигателя |
6 | Ток. отсечка | 1.2…2.2...3.0 | Кратность тока относительно его номинального значения. По токовой отсечке определяется заклинивание электродвигателя при работе запорной арматуры. Величина токовой
отсечки должна быть больше уставки тока дожима на 30 % | ||
7 | Несимметрия I | 2…25...50 % | Несимметрия токов электродвигателя | ||
8 | Перегрев | По току PTC | Критерий, по которому контролируется перегрев электродвигателя:
Ниже приведена зависимость времени срабатывания защиты от величины кратности тока перегрузки: 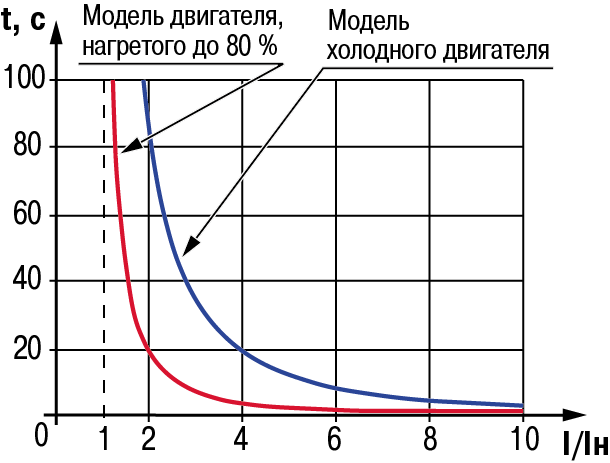 После срабатывания аварии двигатель остывает до 60 % от нагретого состояние за 40 секунд, после чего авария может быть сброшена и двигатель снова запущен | ||
9 | Черед. фаз | Прямое Обратное | Направление вращения электродвигателя | ||
10 | Вход управления | DI4/DI5 AI1 (по умолчанию для ПБР10А-A.х) RS/Eth (/\ / \/) (по умолчанию для ПБР10А-Д.A.х) RS/Eth (0 –100%) | Активный вход управления:
В автоматическом режиме прибор работает по сигналу на выбранном входе управления, по остальным входам сигналы управления игнорируются | ||
11 | Управление задвижкой | 0...100 % | Установка значения положения арматуры (в процентах) при выбранном режиме управления RS/Eth (0–100%) | ||
12 | Зона нечувствительности | 1.0...1.4...10 % | Значение данного параметра определяет область (зону), в пределах которой не будет выполняться точное доведение арматуры до заданного положения. Арматура будет доводиться до выбранного положения с точностью, соответствующей величине данного параметра, задаваемого в процентах Настройка данного параметра используется при выбранном режиме управления RS/Eth (0–100%) | ||
13 | Датчик полож. | Аналоговый КВ | Тип датчика положения арматуры:
| ||
14 | Полный ход | Время хода | 1…10...9999 с | Время полного хода запорной арматуры | |
15 | Калибровка | Откл. Вкл. | Запуск калибровки полного хода. Если калибровка полного хода завершится успешно, на экране отобразятся измеренные параметры полного хода, а значения запишутся в параметр Время хода [14]. В случае завершения калибровки с ошибкой, на экране отобразится сообщение с ее деталировкой (значение параметра Время хода при этом не изменится): | ||
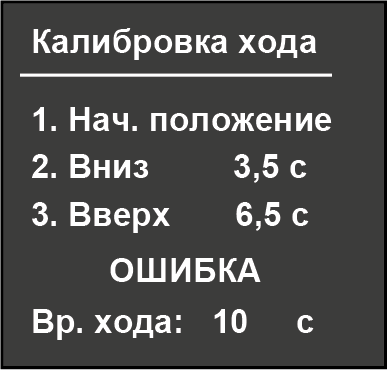 | |||||
16 | Безоп. полож. | Открыто Закрыто | Положение арматуры, в которое она перейдет в случае появления соответствующего управляющего сигнала (на DI или по интерфейсу связи) или по таймауту, вызванному обрывом соединения по интерфейсу связи | ||
17 | Дожим | Состояние | Вкл. по DI Вкл. всегда | Активация режима уплотнения запорной арматуры при закрытии:
| |
18 | Критерий | По току По МВ | Критерий завершения режима «дожим». В случае достижения концевого закрытого положения запорная арматура продолжит движение до момента, пока:
| ||
19 | Уставка тока | 0.8…1.0...2.0 | Уставка кратности тока дожима относительно заданного в параметре Ном. значение [5]. Значение не должно превышать установленное в параметре Токовая осечка [6]. Если данное требование не будет соблюдено, арматура не сможет открыться
после дожима по току | ||
Конфигурация | |||||
20 | DI | Уровень лог. 1 | Высокий Низкий |
| |
21 | Функции | DI1 | КВЗ КВО МВ Блок. защит Сброс аварий Дожим Авар. стоп Безоп. полож. Закрыть Открыть Ручной режим | Функции настраиваемых DI:
Если одна и та же функция установлена на несколько входов, то она сработает по сигналу на любом из них | |
22 | DI2 | КВЗ КВО МВ Блок. защит Сброс аварий Дожим Авар. стоп Безоп. полож. Закрыть Открыть Ручной режим | |||
23 | DI3 | КВЗ КВО МВ Блок. защит Сброс аварий Дожим Авар. стоп Безоп. полож. Закрыть Открыть Ручной режим | |||
24 | DI4 | КВЗ КВО МВ Блок. защит Сброс аварий Дожим Авар. стоп Безоп. полож. Закрыть Открыть Ручной режим | |||
25 | DI5 | КВЗ КВО МВ Блок. защит Сброс аварий Дожим Авар. стоп Безоп. полож. Закрыть Открыть Ручной режим | |||
26 | AI | AI1 | 0...10 В 2...10 В 0...20 мА 4...20 мА 0...5 мА | Тип аналогового входа | |
27 | AI2 | 0...10 В 2...10 В 0...20 мА 4...20 мА 0...5 мА | |||
28 | Уровень сигнала AI1 | 0...150 % | Показания текущих значений сигналов AI1 и AI2 в процентах | ||
29 | Уровень сигнала AI2 | 0...120 % | |||
30 | AI2 в позиции «Открыто» | 0...20 % | Корректировка сигнала AI2 от датчика положения арматуры для позиции «Открыто» Величина корректировки задается в процентах от верхнего значения выбранного измеряемого диапазона AI2 | ||
31 | AI2 в позиции «Закрыто» | 0...100...120 % | Корректировка сигнала AI2 от датчика положения арматуры для позиции«Закрыто» Величина корректировки задается в процентах от верхнего значения выбранного измеряемого диапазона AI2 | ||
32 | AO | Откл. 0...1 В 0...10 В 0...20 мА 4...20 мА | Тип аналогового выхода (только для модификаций ПБР10А-х.АО) | ||
33 | Задержка МТЗ | 0...110 мс | Задаваемое увеличение времени до срабатывания максимальной токовой защиты | ||
34 | Отключение аварий | Максимальная токовая защита | Лог. 0 – Откл. Лог. 1 – Вкл. | Функция отключения аварий позволяет выполнить сброс каждой аварии отдельно Сброс аварии осуществляется посредством записи логического 0 в регистр соответствующей аварии. Запись логической 1 в регистр соответствует включению аварии | |
35 | Аварийный стоп | ||||
36 | Обрыв питающей фазы L1 | ||||
37 | Обрыв питающей фазы L2 | ||||
38 | Обрыв питающей фазы L3 | ||||
39 | Перенапряжение | ||||
40 | Низкое напряжение | ||||
41 | Отклонение частоты | ||||
42 | Несимметрия напряжений | ||||
43 | Несимметрия токов | ||||
44 | Перегрев пускателя | ||||
45 | Отключение аварии по перегреву двигателя | ||||
46 | КЗ датчика РТС | ||||
47 | Обрыв аналогового датчика AI1 | ||||
48 | Обрыв аналогового датчика AI2 | ||||
49 | Нагрузка отсутствует | ||||
50 | Ошибка позиционирования запорной арматуры | ||||
51 | RS-485 | Адрес | 1...247 | Параметры обмена по интерфейсу RS-485 | |
52 | Скорость | 9600, 14400, 19200, 38400, 57600, 115200 бит/с | |||
53 | Длина слова | 8 бит | |||
54 | Четность | Нет Чет Нечет | |||
55 | Стоп бит | 1 2 | |||
56 | Ethernet | DHCP* | Откл. Вкл. | Параметры обмена по интерфейсу Ethernet | |
57 | MAC-адрес | ХХ-ХХ-ХХ-ХХ-ХХ-ХХ (редактирование запрещено) | |||
58 | Текущий IP | 192.168.1.99 (редактирование запрещено) | |||
59 | IPv4* | 192.168.1.99 | |||
60 | Маска подсети* | 255.255.255.0 | |||
61 | Шлюз* | 192.168.1.1 | |||
62 | DNS1* | 8.8.8.8 | |||
63 | DNS2* | 8.8.8.8 | |||
64 | Календарь | Дата | 01.01.2000 | Дата и время (в формате ДД.ММ.ГГГГ ЧЧ:ММ:СС) | |
65 | Время | 00:00:00 | |||
66 | По умолчанию | Откл. Вкл. | Сброс настроек в значения по умолчанию. Для сброса настроек следует установить значение Вкл., после сброса параметр автоматически вернется в значение Откл. | ||
* Параметры применяются
только после перезагрузки прибора | |||||
Перечень аварий
В таблице представлены аварии, причины их возникновения и способы устранения.
При возникновении любой из аварий:
обесточивается двигатель запорной арматуры;
замыкается DO;
на экране прибора отображается наименование аварии;
в журнале событий фиксируется авария и величина параметра, по которому она сработала.
Для снятия статуса аварии необходимо соблюдение следующих условий:
отсутствие признака аварии;
сброс аварии по нажатию кнопки
, по сигналу на DI или по сети.
Чтобы облегчить поиск и настройку параметров, в квадратных скобках ([Х]) приведена ссылка на номер параметра в первом столбце таблицы.
Перечень аварий прибора
Индикация аварий | Описание | Причина | Способ устранения | |
|---|---|---|---|---|
Наименование | Параметр | |||
tС двиг. | – | Перегрев двигателя
(определяется либо по току, либо по показаниям датчика PTC – настраивается в параметре [8]) | Нагрев двигателя выше критического уровня из-за перегрузки по току | При срабатывании аварии подождать, пока двигатель остынет. Убедиться в правильности настройки параметров [5] и [8]. Убедиться, что двигатель не перегружен. Если в параметре [8] установлено PTC – убедиться в целостности цепей подключения датчика |
Неверная настройка номинального тока двигателя (параметр Ном. значение [5]) | ||||
| В параметре Перегрев [8] установлено PTC, но PTC-датчик физически не подключен | ||||
КЗ РТС | – | КЗ PTC-датчика двигателя | КЗ в цепях подключения датчика или самом датчике (сопротивление на входе PTC менее 20 Ом) | Устранить КЗ в цепях подключения датчика. Заменить датчик на исправный |
Несимм. I | Величина несимметрии (в %) | Несимметрия токов двигателя | Несимметрия токов в нагрузке превышает значение, заданное в параметре Несимметрия I [7], в течение 10 с | Убедиться, что величина параметра [3] не менее величины параметра [7]. Устранить неисправность нагрузки |
Авар. стоп | – | Аварийный стоп | Наличие сигнала на DI, настроенном на аварийный стоп | Снять сигнал с соответствующего DI |
fmax/min | Знак и величина отклонения (в Гц) | Отклонение частоты питающей сети | Частота напряжения в питающей сети выходит за допустимые пределы, указанные в параметре f сети [4], в течение 10 с | Убедиться в корректности настройки параметра [4]. Подключить прибор к исправной сети электропитания |
Обрыв фаз пит. | L1, и/или L2, и/или L3 | Обрыв фаз питающей сети | Обрыв одной или нескольких фаз питания (только для питания от трехфазной сети) | Убедиться, что на силовом входе прибора присутствуют все фазные напряжения |
Umax/min | Знак и величина отклонения (в В) | Отклонение напряжения питающей сети | Величина напряжения в сети выходит за допустимые рамки, заданные в параметре Отклонение [2], в течение 60 с | Убедиться, что значение параметра [2] установлено верно. Восстановить нормальный уровень напряжения в питающей сети |
Несимм. U | Величина несимметрии (в %) | Несимметрия напряжений питающей сети | Несимметрия напряжения в сети превышает допустимую величину, заданную в параметре Несимметрия U [3], в течение 10 с | Убедиться, что параметр [3] установлен верно. Устранить несимметрию питающего напряжения |
МТЗ | – | Максимальная токовая защита | Превышение мгновенного значения тока более 50 А | Устранить неисправность нагрузки, цепей подключения нагрузки |
tс пускателя | – | Перегрев пускателя | Температура внутри пускателя:
| Убедиться, что количество пусков двигателя не превышает 630 пусков в час. Убедиться, что температура окружающей среды не превышает допустимую. Отключить прибор, дать время остыть |
Положение | – | Ошибка позиционирования запорной арматуры | При работе по КВ:
| Проверить заклинивание арматуры (расклинить ее при необходимости). Проверить работоспособность КВ и МВ, в случае необходимости заменить их исправными. Убедиться в корректности настройки положений КВ и МВ |
| При работе по аналоговому датчику обратной связи – сработала токовая отсечка или МВ, когда концевое положение еще не достигнуто (кроме случая дожима) | ||||
Нет нагрузки | – | Нагрузка отсутствует | При пуске и в ходе работы ток в одной или нескольких фазах менее 10 % от указанного в параметре Ном. значение [5] | Подключить нагрузку |
Сил. ключ | – | Неисправность силовой схемы | Один или несколько силовых ключей неисправны | Обратиться в сервисный центр |
| Обрыв AI1 | AI1 | Обрыв аналогового сигнала по входу 1 | Уровень аналогового сигнала ниже минимального (только для режимов 4–20 мА и 2–10 В) | Проверить цепи подключения аналоговых сигналов и исправность задатчиков сигналов |
| Обрыв AI2 | AI2 | Обрыв аналогового сигнала по входу 2 | ||
Перечень рабочих событий
В таблице представлена информация относительно рабочих событий прибора.
Все события фиксируются в журнале.
Перечень рабочих событий
Индикация события | Описание | |
|---|---|---|
| Наименование | Параметр | |
| Калибр. хода | Успешно или Ошибка | Калибровка полного хода |
| Вкл. | – | Включение |
| Изм. настр. | Наименование измененного параметра | Изменение настроек |
| Конц. полож. | Открыто или Закрыто | Достижение концевых положений |
| Пуск | Открытие или Закрытие | Пуск + направление движения запорной арматуры |
| Стоп | – | Останов запорной арматуры |
| Безоп. полож. | – | Переход в безопасное положение |
| Дожим | – | Дожим |
| Сброс авар. | – | Сброс аварий |
| Блок. защит | – | Блокировка защит |
Подключение к Owen Configurator
Для настройки прибора рекомендуется использовать приложение
Для настройки прибора при помощи Owen Configurator требуется подключить прибор к ПК. Это можно сделать при помощи следующих интерфейсов:
- USB;
- Ethernet;
- RS-485.
Для установления связи между конфигуратором и прибором следует:
- Подключить прибор к ПК при помощи одного из интерфейсов, описанных
выше.
 Примечание
ПримечаниеВ случае подключения прибора к порту USB подача основного питания прибора не требуется.
Питание прибора осуществляется от порта USB, силовые выходы прибора не функционируют.
- Запустить Owen Configurator.
- Выбрать Добавить устройства.
- В разделе Сетевые настройки в выпадающем меню Интерфейс выбрать:
- Ethernet (или другую сетевую карту, к которой подключен прибор) – для подключения по Ethernet;
- STMicroelectronics Virtual COM Port – для подключения по RS-485 или USB.
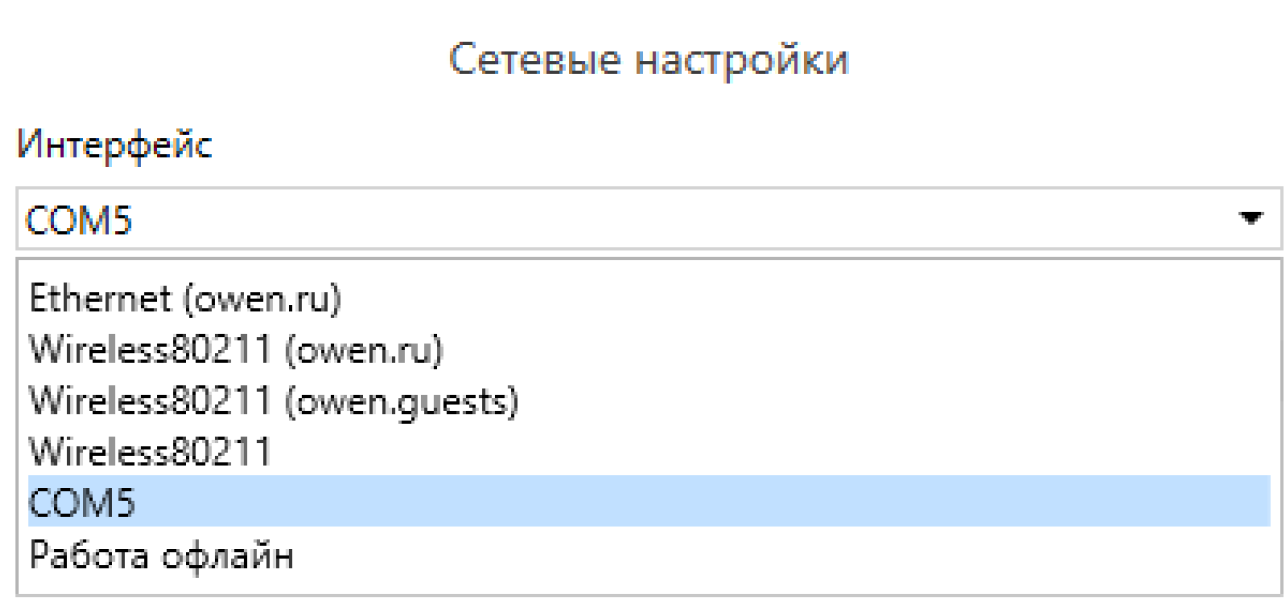
Меню выбора интерфейса
Для установления связи между конфигуратором и прибором, подключенным по интерфейсу Ethernet, следует:
- Выбрать Найти одно устройство.
- Ввести IP-адрес подключенного устройства.
- Нажать кнопку Найти. В окне отобразится прибор с указанным IP-адресом.
- Выбрать устройство (отметить галочкой) и нажать Добавить устройство.
Для установления связи между конфигуратором и прибором, подключенным по интерфейсу USB или RS-485, следует:
- В выпадающем меню Протокол выбрать протокол Owen Auto
Detection Protocol.
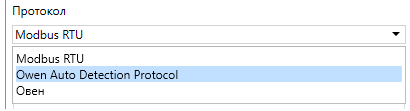
Выбор протокола - Выбрать Найти одно устройство.
- В разделе Настройки подключения выбрать Задать самостоятельно.
- Установить значения настроек подключения по RS-485 в соответствии с заданными в приборе.
- Ввести адрес подключенного устройства.
- Нажать кнопку Найти. В окне отобразится прибор с указанным адресом.
- Выбрать устройство (отметить галочкой) и нажать Добавить устройство.
Более подробная информация о подключении и работе с прибором приведена в Справке на Owen Configurator. Для вызова справки в программе следует нажать клавишу F1.
Подключение к облачному сервису OwenCloud
Для подключения прибора к облачному сервису следует:
- Убедиться, что прибор подключен к Ethernet.
- Зайти на сайт облачного сервиса
https://web.owencloud.ru . - Зарегистрироваться.
- Перейти в раздел Администрирование и добавить прибор.
- В качестве идентификатора указать заводской номер.
- В поле Тип прибора установить Автоопределяемые приборы ОВЕН.
- В поле Пароль ввести пароль для OwenCloud, установленный через Owen Configurator (см. ниже).
Если пароль для прибора не задан, подключение
к облачному сервису недоступно.
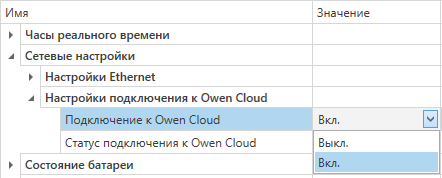
Облачный сервис OwenCloud является надежным хранилищем данных, обмен информации с которым зашифрован прибором. Если на производстве имеются ограничения на передачу данных, то обмен данными с облачным сервисом OwenCloud можно отключить. По умолчанию подключение прибора к облачному сервису запрещено. Ограничение доступа и обмена данными с прибором следует настраивать в Owen Configurator.
Для разрешения подключения в Owen Configurator следует:
- Установить пароль для доступа к прибору.Примечание
Установить или изменить пароль можно с помощью Owen Configurator.
В случае утери пароля следует восстановить заводские настройки.
По умолчанию пароль не задан.
- Задать значение Вкл. в параметре Подключение к OwenCloud (рисунок).
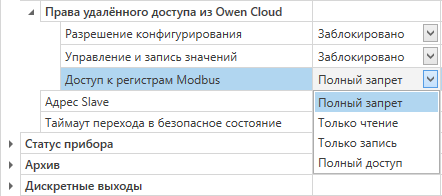
Если доступ к прибору через облачный сервис OwenCloud разрешен, то можно настроить следующие ограничения доступа (рисунок):
- Разрешение конфигурирования – доступ к конфигурационным параметрам прибора;
- Управление и запись значений – чтение и запись значений выходов прибора;
- Доступ к регистрам Modbus – чтение и/или запись значений регистров.
Обновление встроенного ПО
Встроенное ПО прибора обновляется с помощью интерфейсов:
- USB;
- Ethernet (рекомендуется).
Для обновления встроенного ПО по интерфейсу USB следует:
- Перед включением питания прибора нажать и удерживать кнопку , после включения отпустить кнопку.
Прибор перейдет в режим загрузчика, о чем будет свидетельствовать
синхронное мигание красным цветом единичных индикаторов Режим и Работа.
- Обновить ПО с помощью актуальной версии прошивки, которую можно скачать по ссылке: https://owen.ru/soft/driver.
Для обновления встроенного ПО по интерфейсу Ethernet следует:
- В Owen Configurator выбрать вкладку «Прошить устройство».
 ПредупреждениеДля обновления встроенного программного обеспечения через Owen Configurator следует отключить прибор от удаленного облачного сервиса OwenCloud.
ПредупреждениеДля обновления встроенного программного обеспечения через Owen Configurator следует отключить прибор от удаленного облачного сервиса OwenCloud. - Выполнять указания программы (файл встроенного ПО размещен на
сайте
www.owen.ru ). - Перезагрузить прибор.
Настройка часов реального времени
Значение часов реального времени (RTC) можно установить или считать с прибора через регистры Modbus, а также с помощью Owen Configurator (см. справку к Owen Configurator, раздел «Настройка часов»).
Для установки нового времени через регистры Modbus следует:
Записать значение времени в соответствующие регистры.
- Установить на время не менее 1 секунды значение 1 в регистре обновления текущего времени.
- Записать в регистр обновления текущего времени значение 0.
Следующая запись текущего времени может быть произведена через 1 секунду.
Техническое обслуживание
Во время выполнения работ по техническому обслуживанию прибора следует соблюдать меры безопасности, изложенные в разделе.
Техническое обслуживание прибора проводится не реже одного раза в 6 месяцев и включает следующие процедуры:
- проверку крепления прибора;
- проверку и протяжку винтовых соединений;
- удаление пыли и грязи с клеммника прибора.
Маркировка
На корпус прибора наносятся:
- наименование прибора;
- номинальный ток;
- род питающего тока и напряжение питания;
- частота питающего напряжения;
- степень защиты по ГОСТ 14254;
- товарный знак;
- единый знак обращения продукции на рынке государств – членов Таможенного союза (ЕАС);
- QR-код, заводской номер прибора;
- страна-изготовитель.
На потребительскую тару наносятся:
- наименование прибора;
- единый знак обращения продукции на рынке государств – членов Таможенного союза (ЕАС);
- заводской номер прибора;
- штрих-код;
- контактные данные фирмы-производителя;
- дата упаковки;
- страна-изготовитель.
Упаковка
Упаковка прибора производится в соответствии с ГОСТ 23088-80 в потребительскую тару, выполненную из коробочного картона по ГОСТ 7933-89.
Упаковка прибора при пересылке почтой производится по ГОСТ 9181-74.
Транспортирование и хранение
Прибор следует транспортировать в закрытом транспорте любого вида в транспортной таре поштучно или контейнерах. В транспортных средствах тару следует крепить согласно правилам, действующим на соответствующих видах транспорта.
Условия транспортирования:
температура окружающего воздуха от минус 40 до +75 °С;
относительная влажность воздуха 75 % при +15 °С.
Условия хранения в таре на складе изготовителя и потребителя должны соответствовать условиям 1 по ГОСТ 15150. В воздухе не должны присутствовать агрессивные примеси.
Прибор следует хранить на стеллажах.
Комплектность
| Наименование | Количество |
|---|---|
| Прибор | 1 шт. |
| Заглушка порта Ethernet | 1 шт. |
| Руководство по эксплуатации | 1 экз. |
| Паспорт и гарантийный талон | 1 экз. |
Изготовитель оставляет за собой право внесения изменений
в комплектность прибора.
Гарантийные обязательства
Изготовитель гарантирует соответствие прибора требованиям ТУ при соблюдении условий эксплуатации, транспортирования, хранения и монтажа.
Гарантийный срок эксплуатации – 2 года со дня продажи.
В случае выхода прибора из строя в течение гарантийного срока при соблюдении условий эксплуатации, транспортирования, хранения и монтажа предприятие-изготовитель обязуется осуществить его бесплатный ремонт или замену.
Порядок передачи прибора в ремонт содержится в паспорте и в гарантийном талоне.
Параметры, доступные по протоколу Modbus
Используемые форматы данных:
INTx – x-разрядное знаковое целое число;
UINTx – x-разрядное беззнаковое целое число;
FLOAT – 32-разрядное число стандарта IEEE 754 (IEC 60559);
StringX – x-битная ASCII строка;
Date time 32 – 32-разрядное число, содержащее количество секунд, прошедшее с 01.01.2000 г.
Параметры, необходимые для обмена посредством сторонних приложений: функция чтения – 3; функция записи – 16; идентификатор устройства – адрес RS-485.
Параметр | Значение | Адрес первого регистра параметра | Количество регистров | Формат данных | Тип доступа | |
|---|---|---|---|---|---|---|
dec | hex | |||||
DNS11) | Основной DNS-сервер | 12 | C | 2 | UINT322) | Чтение/запись |
DNS21) | Альтернативный DNS-сервер | 14 | E | 2 | UINT322) | Чтение/запись |
IPv41) | IP-адрес | 20 | 14 | 2 | UINT322) | Чтение/запись |
Маска подсети1) | Маска подсети | 22 | 16 | 2 | UINT322) | Чтение/запись |
Шлюз1) | Основной шлюз | 24 | 18 | 2 | UINT322) | Чтение/запись |
Текущий IP | IP-адрес | 26 | 1A | 2 | UINT322) | Чтение |
MAC-адрес | MAC-адрес | 61696 | F211 | 3 | UINT482) | Чтение |
Текущая маска подсети | Маска подсети | 28 | 1C | 2 | UINT322) | Чтение |
Текущий IP-адрес шлюза | Основной шлюз | 30 | 1E | 2 | UINT322) | Чтение |
DHCP1) | 0 – Откл. 1 – Вкл. | 32 | 20 | 1 | UINT8 | Чтение/запись |
Подключение к OwenCloud | 0 – Откл. 1 – Вкл. | 35 | 23 | 1 | UINT8 | Чтение/запись |
Статус подключения к OwenCloud | 0 – Нет соединения 1 – Идентификация 2 – Работа 3 – Ошибка сети 4 – Нет пароля | 36 | 24 | 1 | UINT8 | Чтение |
Температура микроконтроллера | Показания встроенного датчика температуры, °C | 37 | 25 | 1 | INT8 | Чтение |
Состояния DI5–DI1 | Биты: 0 – DI1 1 – DI2 2 – DI3 3 – DI4 4 – DI5 | 51 | 33 | 1 | UINT8 | Чтение |
Скорость RS-4851) | 5 – 9600 бит/с 6 – 14400 бит/с 7 – 19200 бит/с 8 – 38400 бит/с 9 – 57600 бит/с 10 – 115200 бит/с | 521 | 209 | 1 | UINT8 | Чтение/запись |
Длина слова RS-4851) | Биты: 0 – 8 бит | 522 | 20A | 1 | UINT8 | Чтение/запись |
Стоп-бит RS-4851) | 0 – 1 стоп 1 – 2 стопа | 523 | 20B | 1 | UINT8 | Чтение/запись |
Четность RS-4851) | 0 – Нет 1 – Чет 2 – Нечет | 524 | 20C | 1 | UINT8 | Чтение/запись |
Адрес RS-4851) | Modbus Slave адрес | 527 | 20D | 1 | UINT8 | Чтение/запись |
Разрешение конфигурирования из OwenCloud | 0 – Заблокировано 1 – Разрешено | 701 | 2BD | 1 | UINT8 | Чтение/запись |
Управление и запись значений из OwenCloud | 0 – Заблокировано 1 – Разрешено | 702 | 2BE | 1 | UINT8 | Чтение/запись |
Доступ к регистрам Modbus из OwenCloud | 0 – Полный запрет 1 – Только чтение 2 – Только запись 3 – Полный доступ | 703 | 2BF | 1 | UINT8 | Чтение/запись |
Напряжение батареи | Напряжение батареи, В | 801 | 321 | 1 | UINT16 | Чтение |
Батарея разряжена | 0 – Нет 1 – Да | 802 | 322 | 1 | UINT8 | Чтение |
Уровень сигнала AI1 | Уровень сигнала AI1 в В или мА (в зависимости от «Тип сигнала AI1») | 1006 | 3EE | 2 | FLOAT2) | Чтение |
Уровень сигнала AI2 | Уровень сигнала AI2 в В или мА (в зависимости от «Тип сигнала AI2») | 1014 | 3F6 | 2 | FLOAT2) | Чтение |
Чередование фаз | 0 – Прямое 1 – Обратное | 1107 | 453 | 1 | UINT8 | Чтение/запись |
RMS фазного напряжения L1 | RMS фазного напряжения L1, В | 1231 | 4CF | 2 | FLOAT2) | Чтение |
RMS фазного тока L1 | RMS фазного тока L1, А | 1233 | 4D1 | 2 | FLOAT2) | Чтение |
Активная мощность L1 | Активная мощность в фазе L1, Вт | 1235 | 4D3 | 2 | FLOAT2) | Чтение |
Реактивная мощность L1 | Реактивная мощность в фазе L1, вар | 1237 | 4D5 | 2 | FLOAT2) | Чтение |
Полная мощность L1 | Полная мощность в фазе L1, ВА | 1239 | 4D7 | 2 | FLOAT2) | Чтение |
Коэффициент мощности L1 | Коэффициент мощности в фазе L1 | 1241 | 4D9 | 2 | FLOAT2) | Чтение |
Фазовый угол L1 | Угол между напряжением и током в фазе L1 | 1243 | 4DB | 2 | FLOAT2) | Чтение |
RMS фазного напряжения L2 | RMS фазного напряжения L2, В | 1255 | 4E7 | 2 | FLOAT2) | Чтение |
RMS фазного тока L2 | RMS фазного тока L2, А | 1257 | 4E9 | 2 | FLOAT2) | Чтение |
Активная мощность L2 | Активная мощность в фазе L2, Вт | 1259 | 4EB | 2 | FLOAT2) | Чтение |
Реактивная мощность L2 | Реактивная мощность в фазе L2, вар | 1261 | 4ED | 2 | FLOAT2) | Чтение |
Полная мощность L2 | Полная мощность в фазе L2, ВА | 1263 | 4EF | 2 | FLOAT2) | Чтение |
Коэффициент мощности L2 | Коэффициент мощности в фазе L2 | 1265 | 4F1 | 2 | FLOAT2) | Чтение |
Фазовый угол L2 | Угол между напряжением и током в фазе L2 | 1267 | 4F3 | 2 | FLOAT2) | Чтение |
RMS фазного напряжения L3 | RMS фазного напряжения L3, В | 1279 | 4FF | 2 | FLOAT2) | Чтение |
RMS фазного тока L3 | RMS фазного тока L3, А | 1281 | 501 | 2 | FLOAT2) | Чтение |
Активная мощность L3 | Активная мощность в фазе L3, Вт | 1283 | 503 | 2 | FLOAT2) | Чтение |
Реактивная мощность L3 | Реактивная мощность в фазе L3, вар | 1285 | 505 | 2 | FLOAT2) | Чтение |
Полная мощность L3 | Полная мощность в фазе L3, ВА | 1287 | 507 | 2 | FLOAT2) | Чтение |
Коэффициент мощности L3 | Коэффициент мощности в фазе L3 | 1289 | 509 | 2 | FLOAT2) | Чтение |
Фазовый угол L3 | Угол между напряжением и током в фазе L3 | 1291 | 50B | 2 | FLOAT2) | Чтение |
Частота сети | Частота напряжения в сети, Гц | 1303 | 517 | 2 | FLOAT2) | Чтение |
Конфигурация AO3) | 0 – Откл. 1 – 0–1 В 2 – 0–10 В 3 – 0–20 мА 4 – 4–20 мА | 1576 | 628 | 1 | UINT8 | Чтение/запись |
Функция DI1 | 0 – КВЗ 1 – КВО 2 – МВ 3 – Блок. защит 4 – Сброс аварий 5 – Дожим 6 – Аварийный стоп 7 – Безоп. полож. 8 - Закрыть 9 - Открыть 10 - Ручной режим | 10001 | 2711 | 1 | UINT8 | Чтение/запись |
Функция DI2 | 0 – КВЗ 1 – КВО; 2 – МВ 3 – Блок. защит 4 – Сброс аварий 5 – Дожим 6 – Аварийный стоп 7 – Безоп. полож. 8 - Закрыть 9 - Открыть 10 - Ручной режим | 10002 | 2712 | 1 | UINT8 | Чтение/запись |
Функция DI3 | 0 – КВЗ 1 – КВО 2 – МВ 3 – Блок. защит 4 – Сброс аварий 5 – Дожим 6 – Аварийный стоп 7 – Безоп. полож. 8 - Закрыть 9 - Открыть 10 - Ручной режим | 10003 | 2713 | 1 | UINT8 | Чтение/запись |
Функция DI4 | 0 – КВЗ 1 – КВО 2 – МВ 3 – Блок. защит 4 – Сброс аварий 5 – Дожим 6 – Аварийный стоп 7 – Безоп. полож. 8 - Закрыть 9 - Открыть 10 - Ручной режим | 10064 | 2750 | 1 | UINT8 | Чтение/запись |
Функция DI5 | 0 – КВЗ 1 – КВО 2 – МВ 3 – Блок. защит 4 – Сброс аварий 5 – Дожим 6 – Аварийный стоп 7 – Безоп. полож. 8 - Закрыть 9 - Открыть 10 - Ручной режим | 10065 | 2751 | 1 | UINT8 | Чтение/запись |
Калибровка хода | 0 – Откл. 1 – Вкл. | 10004 | 2714 | 1 | UINT8 | Чтение/запись |
Режим работы4) | 0 – Авто 1 – Ручной | 10005 | 2715 | 1 | UINT8 | Чтение/запись |
Время хода | Время полного хода арматуры, с | 10006 | 2716 | 1 | UINT16 | Чтение/запись |
Аварии | Биты: 0 – МТЗ 1 – Аварийный стоп 2 – Обрыв фазы L1 3 – Обрыв фазы L2 4 – Обрыв фазы L3 5 – Umax 6 – Umin 7 – fсети 8 – Несимметрия U 9 – Несимметрия I 11 – tC пускателя 12 – tC двигателя 13 – КЗ PTC 14 – Обрыв AI1 15 – Обрыв AI2 16 – Нет нагрузки 17 – Неисправность силовой схемы 18 – Положение | 10007 | 2717 | 2 | UINT322) | Чтение |
Управление арматурой | 0 – Стоп 1 – Вниз 2 – Вверх | 10009 | 2719 | 1 | UINT8 | Чтение/запись |
Безопасное положение | Безопасное положение арматуры: 0 – Открыто 1 – Закрыто | 10010 | 271A | 1 | UINT8 | Чтение/запись |
Тип сигнала AI1 | 0 – 0–10 В 1 – 0–20 мА 2 – 0–5 мА 3 – 2–10 В 4 – 4–20 мА | 10011 | 271B | 1 | UINT8 | Чтение/запись |
Тип сигнала AI2 | 0 – 0–10 В 1 – 0–20 мА 2 – 0–5 мА 3 – 2–10 В 4 – 4–20 мА | 10012 | 271C | 1 | UINT8 | Чтение/запись |
Номинальное значение U сети | 0 – 1х230B 1 – 3х400B 2 – 3х230B | 10013 | 271D | 1 | UINT8 | Чтение/запись |
Отрицательное отклонение U сети | Допустимое отрицательное отклонение от «Номинал U сети», % | 10014 | 271E | 1 | UINT8 | Чтение/запись |
Положительное отклонение U сети | Допустимое положительное отклонение от «Номинал U сети», % | 10015 | 271F | 1 | UINT8 | Чтение/запись |
Отклонение f сети | Допустимое отклонение частоты сети, Гц | 10016 | 2720 | 2 | FLOAT2) | Чтение/запись |
Перегрев двигателя | Определение перегрева: 0 – По току 1 – PTC | 10018 | 2722 | 1 | UINT8 | Чтение/запись |
Номинальный ток двигателя | Номинальный ток двигателя, А | 10019 | 2723 | 2 | FLOAT2) | Чтение/запись |
Уставка тока дожима | Кратность тока дожима относительно номинального | 10021 | 2725 | 2 | FLOAT2) | Чтение/запись |
Управление задвижкой | Задаваемое значение (в процентах) положения запорной арматуры (при выборе режима управления RS/Eth (0 - 100%) | 10023 | 2727 | 2 | FLOAT | Чтение/запись |
Токовая отсечка | Кратность максимального тока в работе относительно номинального | 10026 | 272A | 2 | FLOAT2) | Чтение/запись |
Датчик положения | Тип датчика положения: 0 – Аналоговый 1 – КВ | 10028 | 272C | 1 | UINT8 | Чтение/запись |
Вход управления | 0 – DI4/DI5 1 – AI1 2 – RS/Eth (/\ / \/) 3 – RS/Eth (0 –100%) | 10029 | 272D | 1 | UINT8 | Чтение/запись |
Несимметрия I | Допустимая несимметрия токов нагрузки, % | 10030 | 272E | 1 | UINT8 | Чтение/запись |
Несимметрия U | Допустимая несимметрия напряжений питающей сети, % | 10031 | 272F | 1 | UINT8 | Чтение/запись |
Дожим | 0 – Вкл. по DI 1 – Вкл. всегда | 10032 | 2730 | 1 | UINT8 | Чтение/запись |
Критерий дожима | 0 – По току 1 – По МВ | 10033 | 2731 | 1 | UINT8 | Чтение/запись |
Уровень логической единицы DI | 0 – Высокий 1 – Низкий | 10034 | 2732 | 1 | UINT8 | Чтение/запись |
Состояние PTC | 0 – Норма 1 – Перегрев 2 – КЗ | 10035 | 2733 | 1 | UINT8 | Чтение |
Всего пусков | Общее количество пусков двигателя | 10036 | 2734 | 2 | UINT322) | Чтение |
Пусков за час | Количество пусков двигателя за час | 10038 | 2736 | 1 | UINT16 | Чтение |
Время работы | Общее время работы двигателя, с | 10039 | 2737 | 2 | UINT322) | Чтение |
Время работы | Общее время работы двигателя, ч | 10041 | 2739 | 2 | UINT322) | Чтение |
Сброс статистики | 0 – Откл. 1 – Вкл. | 10043 | 273B | 1 | UINT8 | Чтение/запись |
Сброс аварий | 0 – Откл. 1 – Вкл. | 10048 | 2740 | 1 | UINT8 | Чтение/запись |
Настройки по умолчанию | 0 – Откл. 1 – Вкл. | 10049 | 2741 | 1 | UINT8 | Чтение/запись |
Безопасное состояние | Переход в «Безопасное положение»: 0 – Откл. 1 – Вкл. 2 – Вкл. по таймауту | 10051 | 2743 | 1 | UINT8 | Чтение/запись |
Состояние арматуры | 0 – Стоит 1 – Открытие 2 – Закрытие | 10052 | 2744 | 1 | UINT8 | Чтение |
Положение арматуры | Величина закрытия арматуры, % | 10053 | 2745 | 1 | UINT8 | Чтение |
Зона нечувствительности | Величина хода арматуры, в которой будет игнорироваться точное доведение арматуры до заданного положения, % | 10054 | 2746 | 2 | FLOAT | Чтение/запись |
Уровень сигнала AI1 | Текущее значение AI1, % | 10056 | 2748 | 2 | FLOAT | Чтение |
Уровень сигнала AI2 | Текущее значение AI2, % | 10058 | 274A | 2 | FLOAT | Чтение |
AI2 в позиции «Открыто» | Корректировка значения AI2, соответствующего позиции «Открыто», % от верхнего значения диапазона измеряемого сигнала | 10060 | 274C | 2 | FLOAT2) | Чтение/запись |
AI2 в позиции «Закрыто» | Корректировка значения AI2, соответствующего позиции «Закрыто», % от верхнего значения диапазона измеряемого сигнала | 10062 | 274E | 2 | FLOAT2) | Чтение/запись |
Задержка МТЗ | Увеличение времени до срабатывания максимальной токовой защиты, мс | 10066 | 2752 | 1 | UINT8 | Чтение/запись |
Максимальная токовая защита | Отключение аварии максимальной токовой защиты | 10067 | 2753 | 1 | UINT8 | Чтение/запись |
Аварийный стоп | Отключение аварии Аварийный стоп | 10068 | 2754 | 1 | UINT8 | Чтение/запись |
Обрыв питающей фазы L1 | Отключение аварии по обрыву питающей фазы L1 | 10069 | 2755 | 1 | UINT8 | Чтение/запись |
Обрыв питающей фазы L2 | Отключение аварии по обрыву питающей фазы L2 | 10070 | 2756 | 1 | UINT8 | Чтение/запись |
Обрыв питающей фазы L3 | Отключение аварии по обрыву питающей фазы L3 | 10071 | 2757 | 1 | UINT8 | Чтение/запись |
Перенапряжение | Отключение аварии по перенапряжению | 10072 | 2758 | 1 | UINT8 | Чтение/запись |
Низкое напряжение | Отключение аварии по низкому напряжению | 10073 | 2759 | 1 | UINT8 | Чтение/запись |
Отклонение частоты | Отключение аварии по отклонению частоты | 10074 | 275A | 1 | UINT8 | Чтение/запись |
Несимметрия напряжений | Отключение аварии по несимметрии напряжений | 10075 | 275B | 1 | UINT8 | Чтение/запись |
Несимметрия токов | Отключение аварии по несимметрии токов | 10076 | 275C | 1 | UINT8 | Чтение/запись |
Перегрев пускателя | Отключение аварии по перегреву пускателя | 10077 | 275D | 1 | UINT8 | Чтение/запись |
Перегрев двигателя | Отключение аварии по перегреву двигателя | 10078 | 275E | 1 | UINT8 | Чтение/запись |
КЗ датчика PTC | Отключение аварии по КЗ датчика РТС | 10079 | 275F | 1 | UINT8 | Чтение/запись |
Обрыв аналогового датчика AI1 | Отключение аварии по обрыву аналогового датчика AI1 | 10080 | 2760 | 1 | UINT8 | Чтение/запись |
Обрыв аналогового датчика AI2 | Отключение аварии по обрыву аналогового датчика AI2 | 10081 | 2761 | 1 | UINT8 | Чтение/запись |
Нагрузка отсутствует | Отключение аварии по отсутствию нагрузки | 10082 | 2762 | 1 | UINT8 | Чтение/запись |
Ошибка позиционирования | Отключение аварии по ошибке позиционирования запорной арматуры | 10083 | 2763 | 1 | UINT8 | Чтение/запись |
Имя устройства | Строка символов (CP1251) | 61440 | F000 | 16 | UINT2562) | Чтение |
Версия ПО | Строка символов (CP1251) | 61456 | F010 | 16 | UINT2562) | Чтение |
Название платформы | Строка символов (CP1251) | 61472 | F020 | 16 | UINT2562) | Чтение |
Версия платформы | Строка символов (CP1251) | 61488 | F030 | 16 | UINT2562) | Чтение |
Версия аппаратного обеспечения | Строка символов (CP1251) | 61504 | F040 | 8 | UINT1282) | Чтение |
Время ОС | Время, прошедшее с момента запуска операционной системы, мс | 61563 | F07B | 2 | UINT322) | Чтение |
Новое время | Текущие дата/время в секундах с 1 января 2000 г. | 61565 | F07D | 2 | UINT322) | Чтение/запись |
Записать новое время | 0 – Нет 1 – Да | 61567 | F07F | 1 | UINT82) | Чтение/запись |
Время и дата (UTC) | Текущие дата/время в секундах с 1 января 2000 г. | 61568 | F080 | 2 | UINT322) | Чтение |
Часовой пояс | Смещение в минутах от Гринвича | 61570 | F082 | 1 | UINT16 | Чтение/запись |
Заводской номер | Строка символов (CP1251) | 61572 | F084 | 16 | UINT2562) | Чтение |
Событие 15) | Наименование события (текст в ASCII) | 2001 | 0x07D1 | 8 | String128 | Чтение |
Код события 15) | 2009 | 0x07D9 | 1 | UINT16 | Чтение | |
Значение 15) | 2010 | 0x07DA | 2 | FLOAT | Чтение | |
Время 1 Минуты:Секунды5) | Значение минут и секунд текущего времени прибора в момент фиксирования события (старшие 8 бит – минуты, младшие 8 бит – секунды) | 2012 | 0x07DC | 1 | UINT16 | Чтение |
Время 1 День:Час5) | Календарное число и час текущего времени прибора в момент фиксирования события (старшие 8 бит – день, младшие 8 бит – часы) | 2013 | 0x07DD | 1 | UINT16 | Чтение |
Время 1 Год:Месяц5) | Год и месяц текущего времени прибора в момент фиксирования события (старшие 8 бит – год, младшие 8 бит – месяц) | 2014 | 0x07DE | 1 | UINT16 | Чтение |
Событие n5) | Наименование события (текст в ASCII) | 2001+((n-1)*14) | 0x07D1+((n-0x0001)*0x000E) | 8 | String128 | Чтение |
Код события n5) | 2009+((n-1)*14) | 0x07D9+((n-0x0001)*0x000E) | 1 | UINT16 | Чтение | |
Значение n5) | 2010+((n-1)*14) | 0x07DA+((n-0x0001)*0x000E) | 2 | FLOAT | Чтение | |
Время n Минуты:Секунды5) | Значение минут и секунд текущего времени прибора в момент фиксирования события (старшие 8 бит – минуты, младшие 8 бит – секунды) | 2012+((n-1)*14) | 0x07DC+((n-0x0001)*0x000E) | 1 | UINT16 | Чтение |
Время n День:Час5) | Календарное число и час текущего времени прибора в момент фиксирования события (старшие 8 бит – день, младшие 8 бит – часы) | 2013+((n-1)*14) | 0x07DD+((n-0x0001)*0x000E) | 1 | UINT16 | Чтение |
Время n Год:Месяц5) | Год и месяц текущего времени прибора в момент фиксирования события (старшие 8 бит – год, младшие 8 бит – месяц) | 2014+((n-1)*14) | 0x07DE+((n-0x0001)*0x000E) | 1 | UINT16 | Чтение |
Время n | Время фиксирования события в секундах с 00:00 01.01.2000 года с учетом текущего часового пояса | 3001+((n-1)*2) | 0x0BB9+((n-0x0001)*0x0002) | 2 | Date time 32 | Чтение |
1) Параметры применяются только после перезагрузки прибора. 2) 32-битные и более значения рассматриваются как состоящие из 16-битных слов и передаются в little-endian порядке. Например, 32-битное значение 0x12345678 будет передано как 0x56 0x78 0x12 0x34, а строка символов «PBR\0» – 'B' 'P' 0x00 'R'. 3) Параметр доступен только для модификаций ПБР10А-х.АО (с аналоговым выходом). 4) Параметр доступен только для модификаций ПБР10А-A.х (с дисплеем). 5) Параметр доступен только для модификаций ПБР10А-Д.A.х (без дисплея). Для справки: 0 < n < 50. | ||||||
Предупреждающие сообщения
В данном руководстве применяются следующие предупреждения:
Ключевое слово ОПАСНОСТЬ сообщает о непосредственной
угрозе опасной ситуации, которая приведет к смерти или серьезной
травме, если ее не предотвратить.
Ключевое слово ВНИМАНИЕ сообщает о потенциально
опасной ситуации, которая может привести к небольшим травмам.
Ключевое слово ПРЕДУПРЕЖДЕНИЕ сообщает о потенциально
опасной ситуации, которая может привести к повреждению имущества.
Ключевое слово ПРИМЕЧАНИЕ обращает внимание на полезные
советы и рекомендации, а также информацию для эффективной и безаварийной
работы оборудования.
| Ограничение ответственности |
Ни при
каких обстоятельствах |