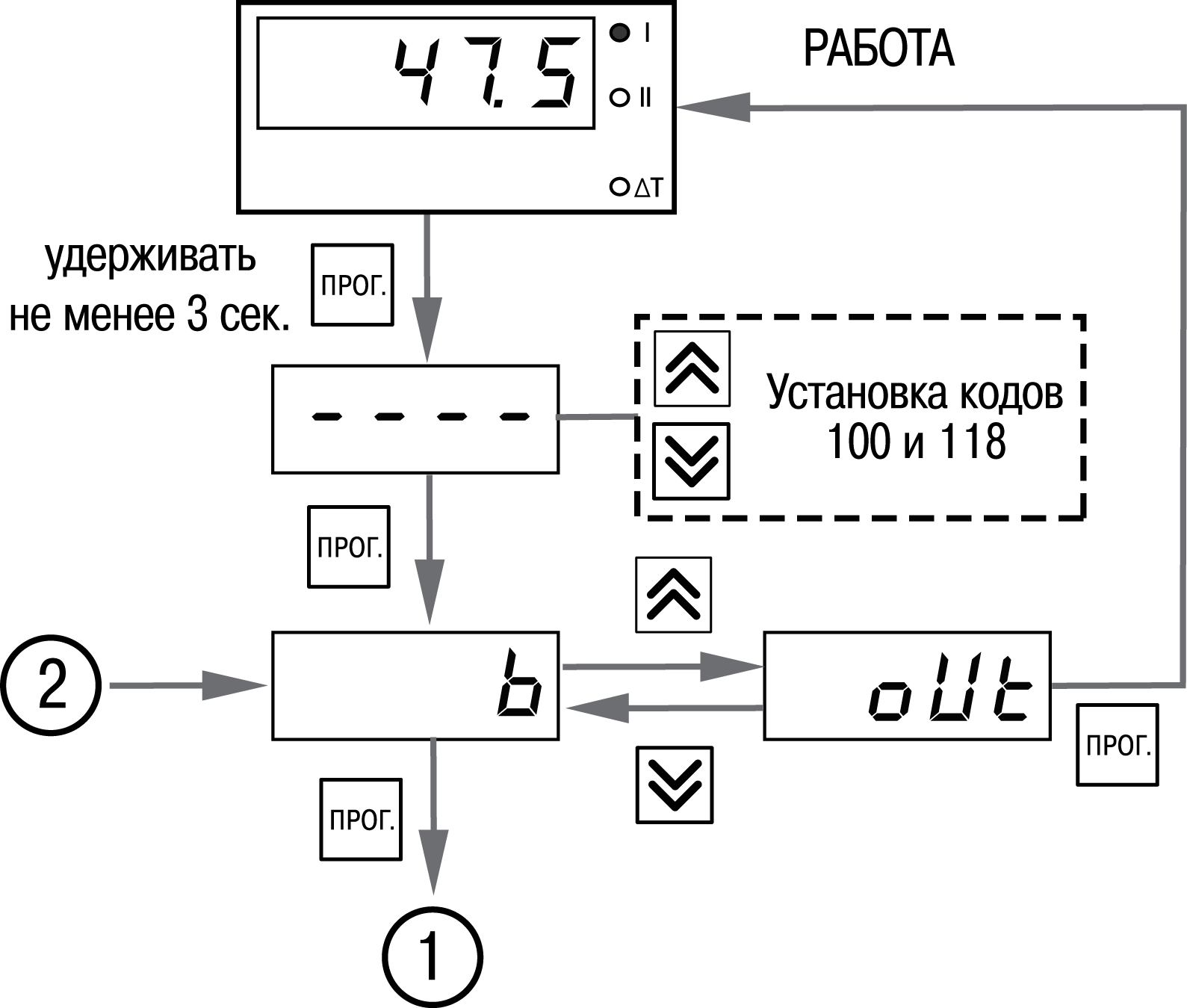
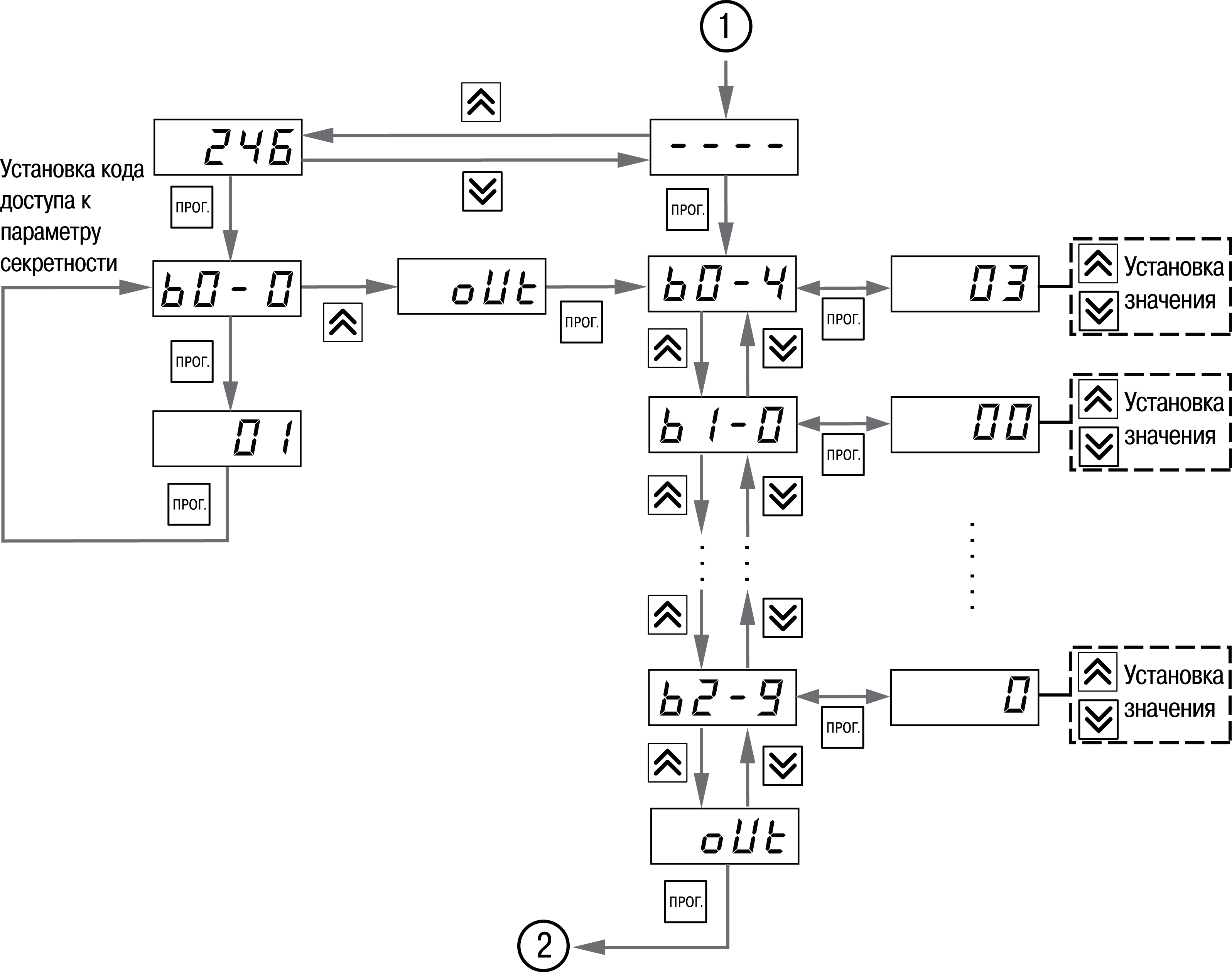
| b0-0 | Параметр секретности для группы b | 01 | Разрешено
изменять рабочие параметры | 01 | |
| 02 | Запрещено
изменять рабочие параметры |
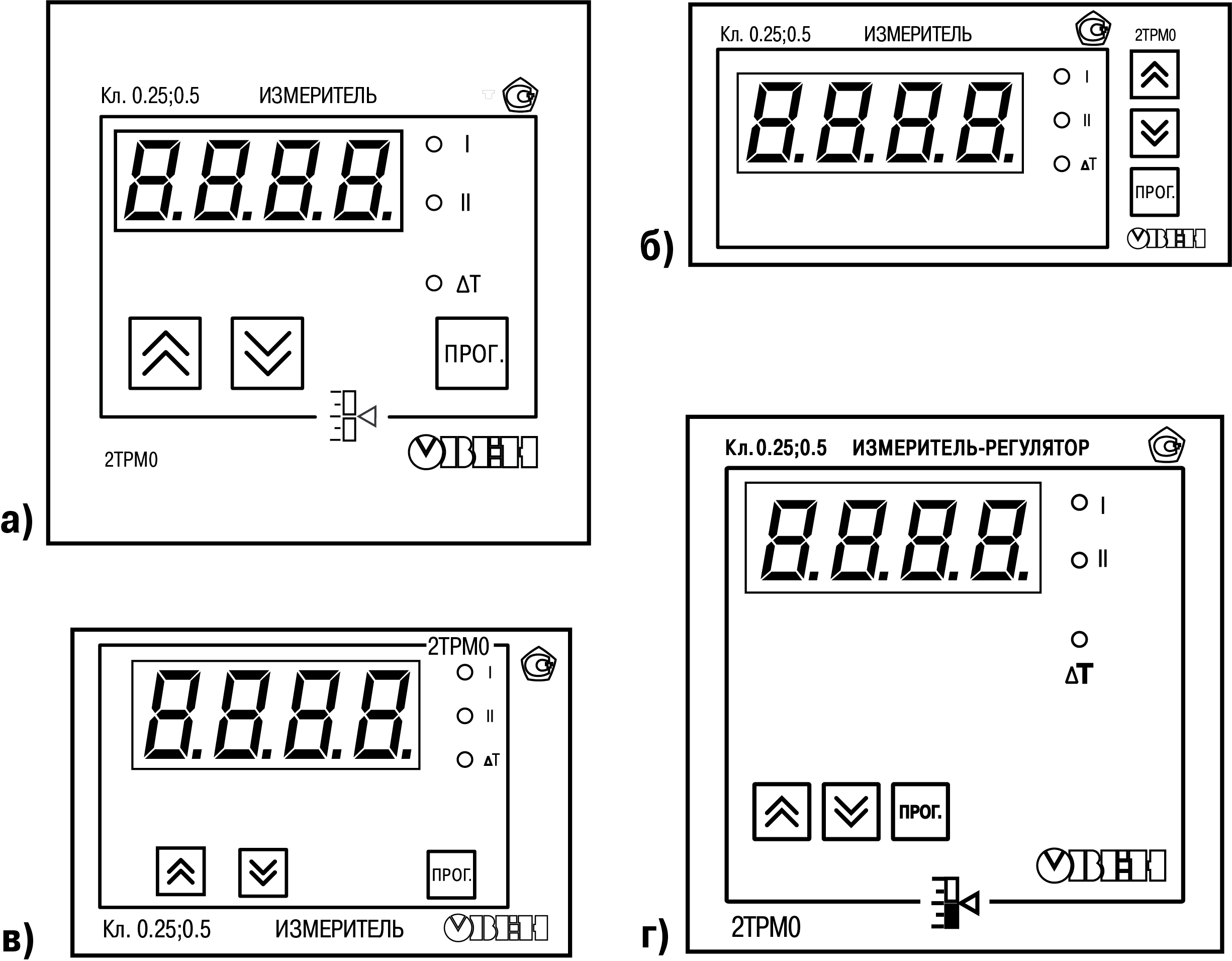
| b0-4 | Режим индикации | 00 | Одиночный
режим. Вывод только первого канала измерения | 01 | |
| 01 | Ручной
режим. Вывод первого или второго канала измерения |
| 02 | Автоматический
режим. Вывод первого или второго канала измерения |
| 03 | Ручной режим.
Вывод первого, второго канала измерения и ΔТ |
| 04 | Автоматический
режим. Вывод первого, второго канала измерения и ΔТ |
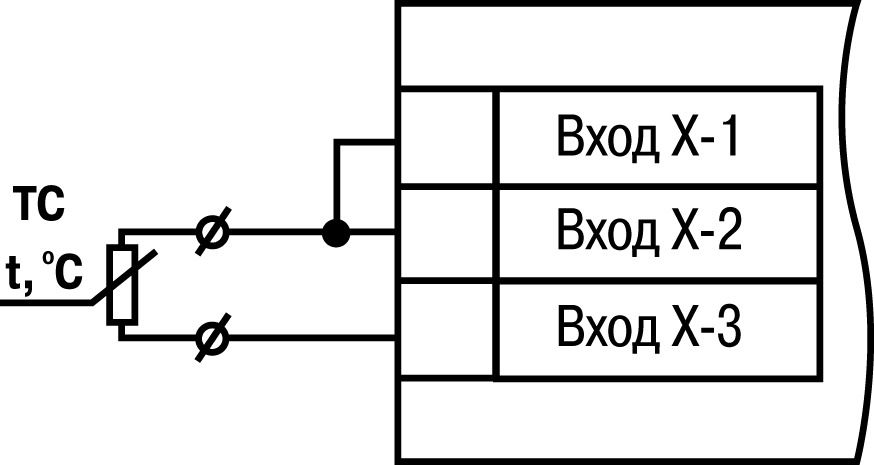
| b1-0 | Код типа датчика, работающего на первом
канале | 01 | Cu 50 (α
= 0,00426 °С -1) | 01 | |
| 09 | 50М
(α = 0,00428 °С -1) |
| 07 | Pt
50 (α = 0,00385 °С -1) |
| 08 | 50П
(α = 0,00391 °С -1) |
| 00 | Cu
100 (α = 0,00426 °С -1) |
| 14 | 100М
(α = 0,00428 °С -1) |
| 02 | Pt
100 (α = 0,00385 °С -1) |
| 03 | 100П
(α = 0,00391 °С -1) |
| 29 | Ni 100 (α =
0,00617 °С -1) |
| 30 | Cu
500 (α = 0,00426 °С -1) |
| 31 | 500М
(α = 0,00428 °С -1) |
| 32 | Pt
500 (α = 0,00385 °С -1) |
| 33 | 500П
(α = 0,00391 °С -1) |
| 34 | Ni 500 (α =
0,00617 °С -1) |
| 35 | Cu
1000 (α = 0,00426 °С -1) |
| 36 | 1000М
(α = 0,00428 °С -1) |
| 37 | Pt
1000 (α = 0,00385 °С -1) |
| 38 | 1000П
(α = 0,00391 °С -1) |
| 39 | Ni 1000 (α
= 0,00617 °С -1) |
| 15 | 53M (α = 0,00426 °С -1) |
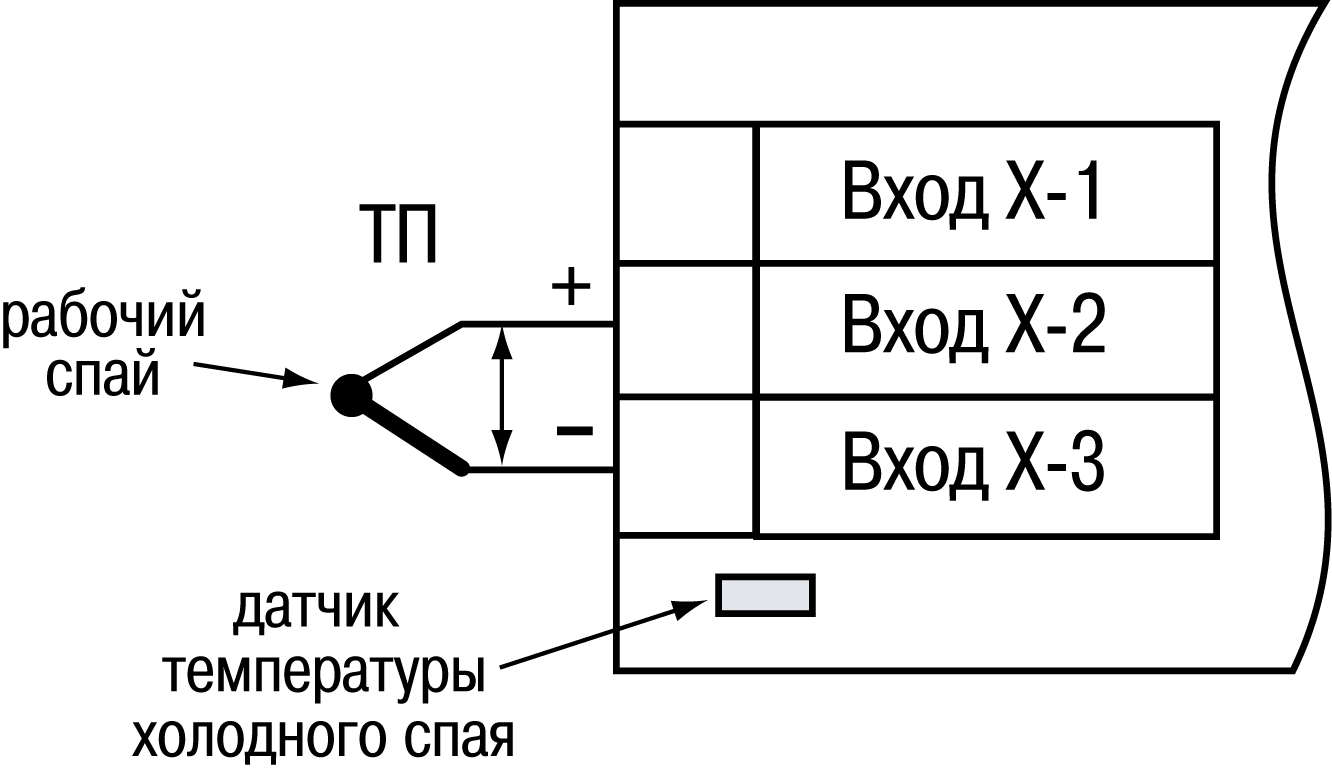
| 04 | ТХК
(L) |
| 20 | ТЖК (J) |
| 19 | ТНН (N) |
| 05 | ТХА (K) |
| 17 | ТПП (S) |
| 18 | ТПП (R) |
| 16 | ТПР (В) |
| 21 | ТВР (А-1) |
| 22 | ТВР (А-2) |
| 23 | ТВР (А-3) |
| 24 | ТМК (Т) |
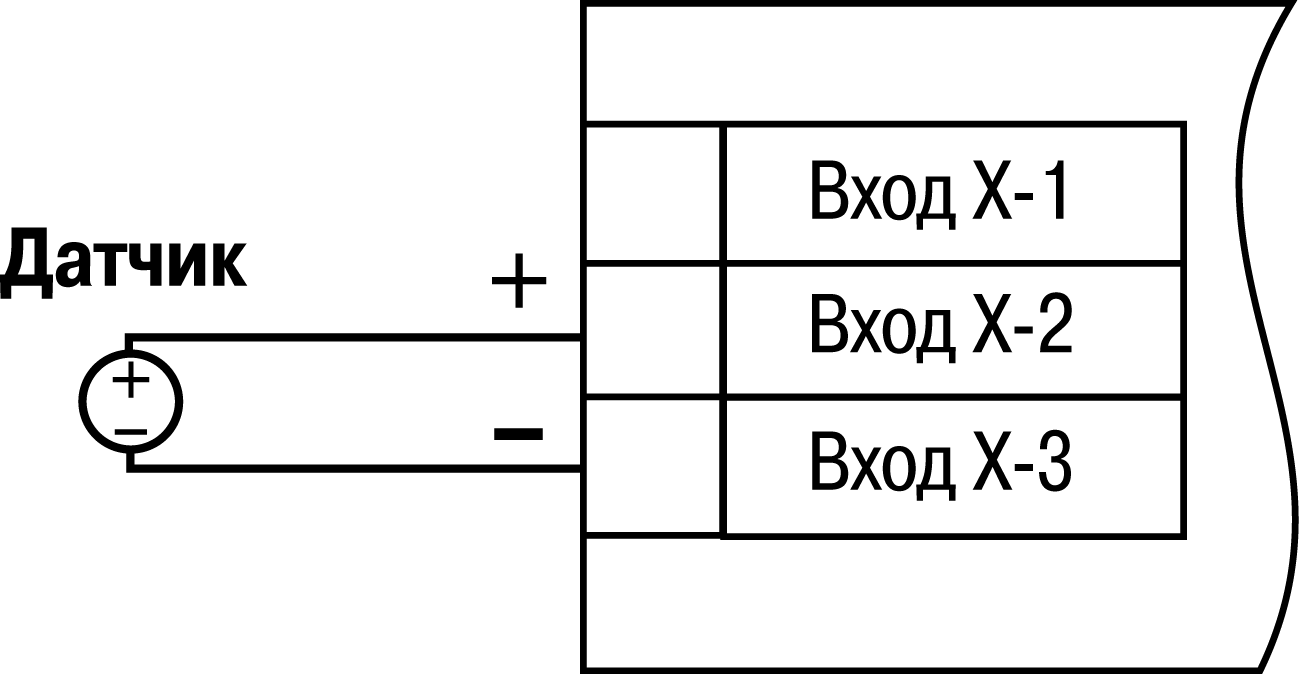
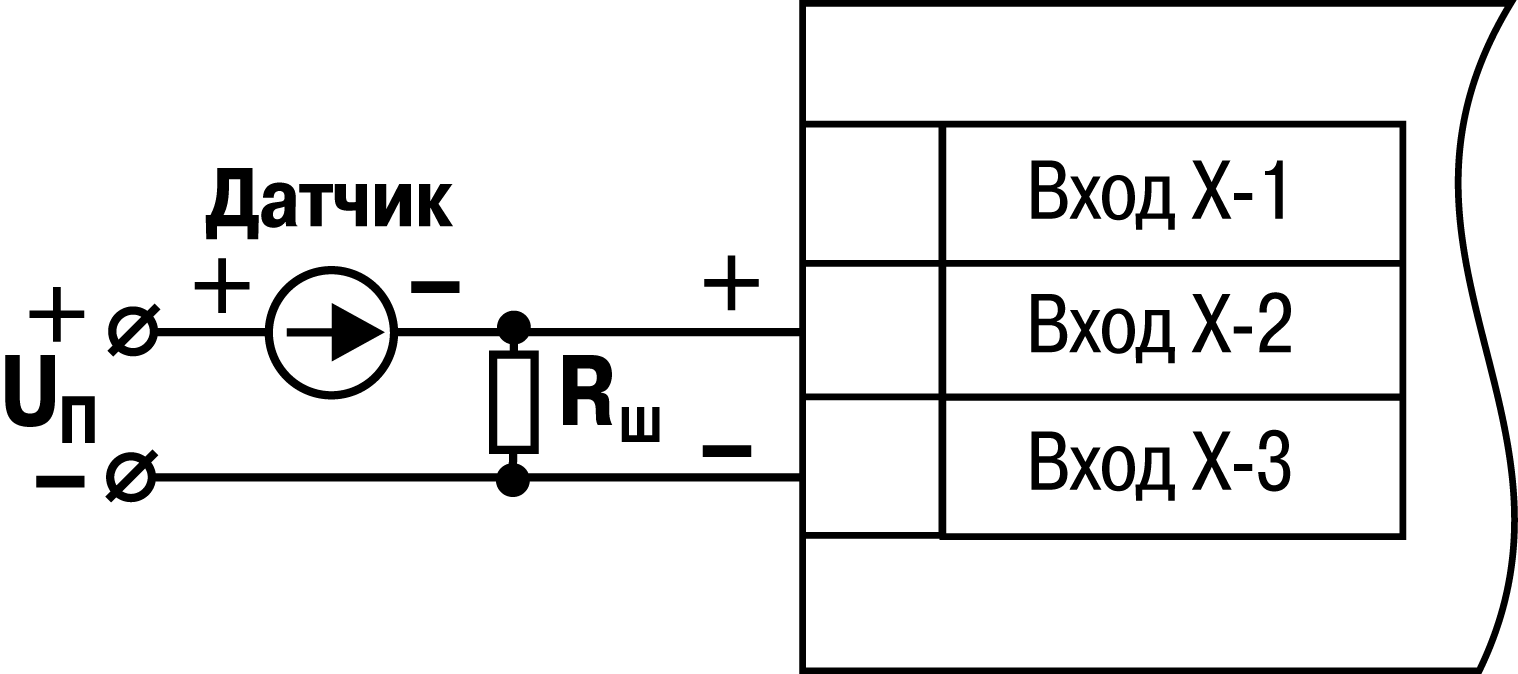
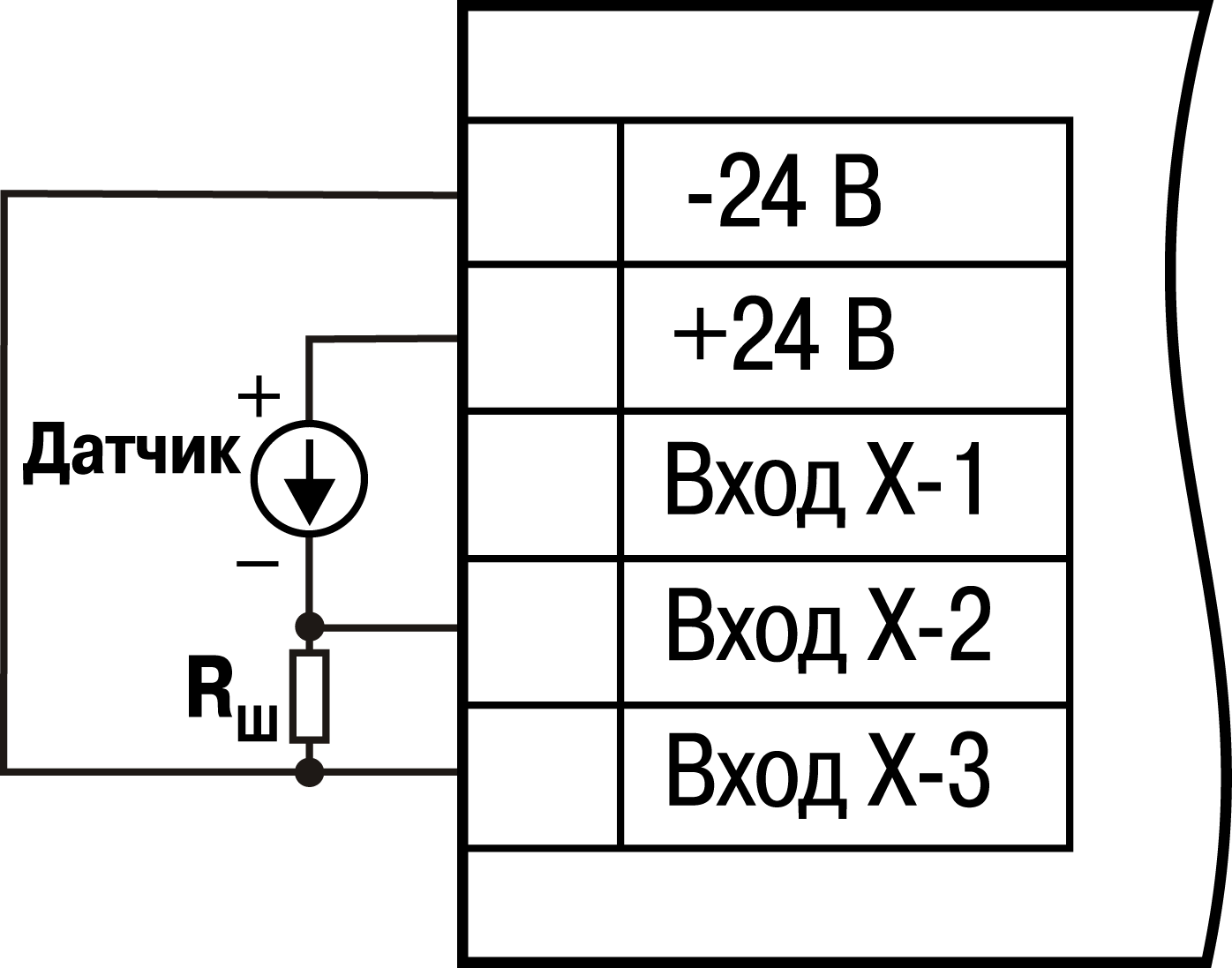
| 12 | Ток 0…5
мА |
| 11 | Ток 0…20
мА |
| 10 | Ток
4…20 мА |
| 06 | Напряжение
–50…50 мВ |
| 13 | Напряжение
0…1 В |
| oFF | Выключен |
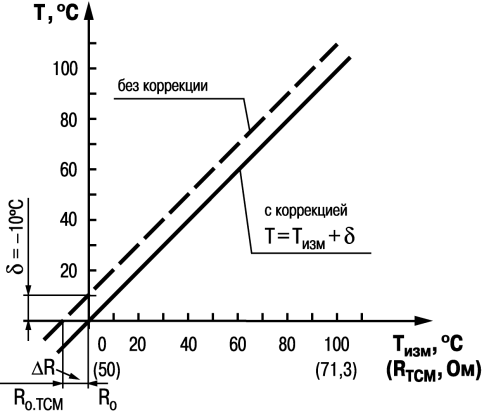
| b1-1 | Коррекция сдвиг характеристики для первого входа | –50,0…50,0 | Суммируется
с измеренным значением | 0,0 | |
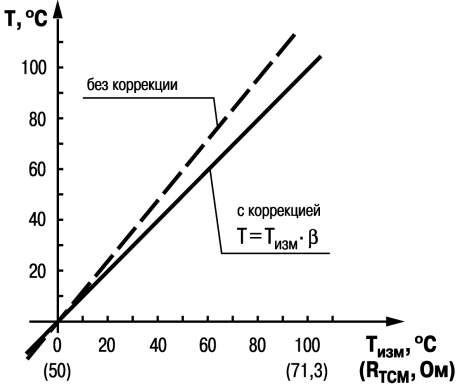
| b1-2 | Коррекция наклон характеристики для первого входа | 0,900…1,100 | Измеренное
значение умножается на заданный коэффициент | 1,000 | |
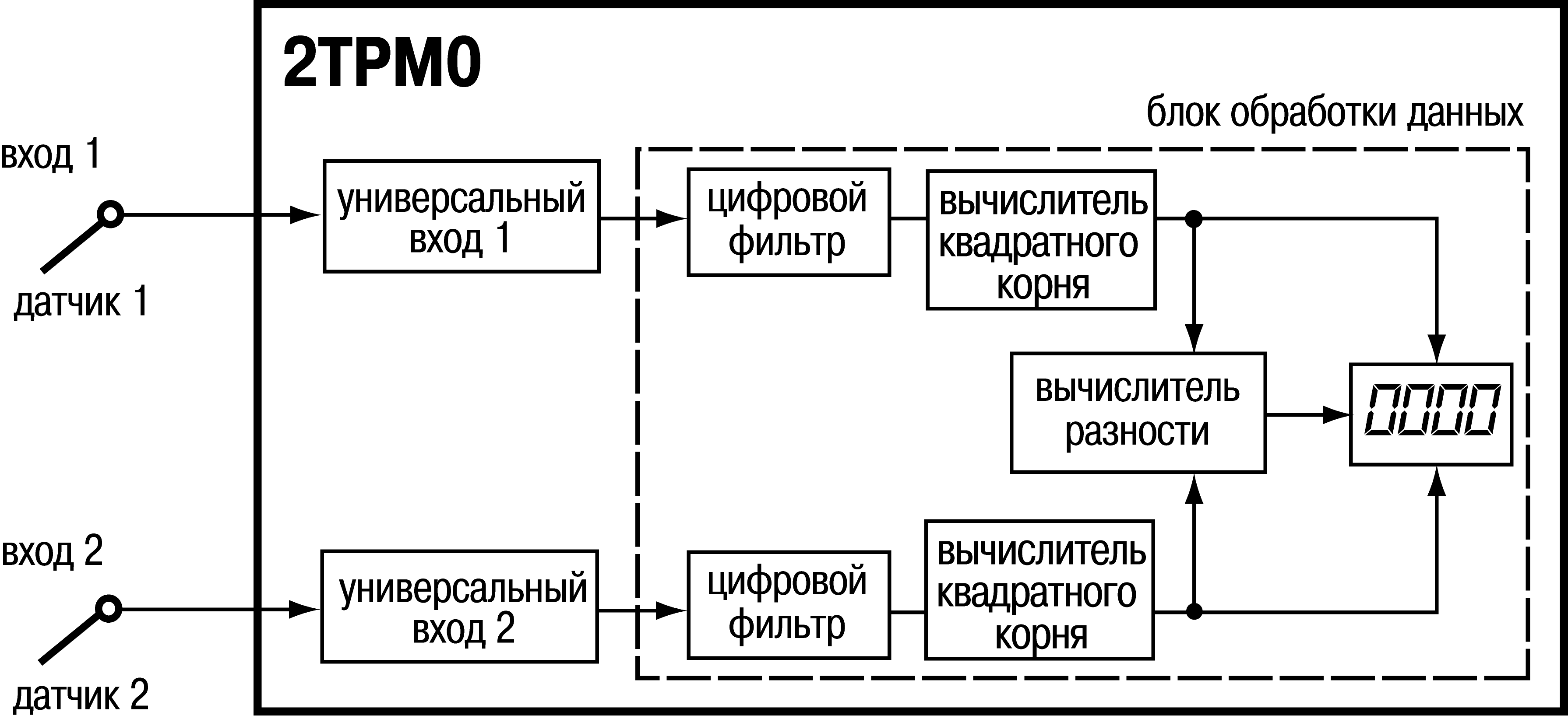
| b1-3 | Режим работы вычислителя квадратного
корня по первому входу | oFF | Выключен | oFF | |
| on | Включен |
| b1-5 | Показание
прибора для нижнего предела унифицированного входного сигнала первого
входа | –999…9999 | Масштабируется
умножением на коэффициент 10-Х, где Х - значение параметра b1-7. | 0,0 | |
| b1-6 | Показание прибора для верхнего предела
унифицированного входного сигнала первого входа | –999…9999 | Масштабируется
умножением на коэффициент 10-Х, где Х - значение параметра b1-7 | 100,0 | |
| b1-7 | Положение десятичной точки при индикации
параметров первого канала | 0,
1, 2 и 3 | Влияет на значения параметров b1-5 и b1-6. | 1 | |
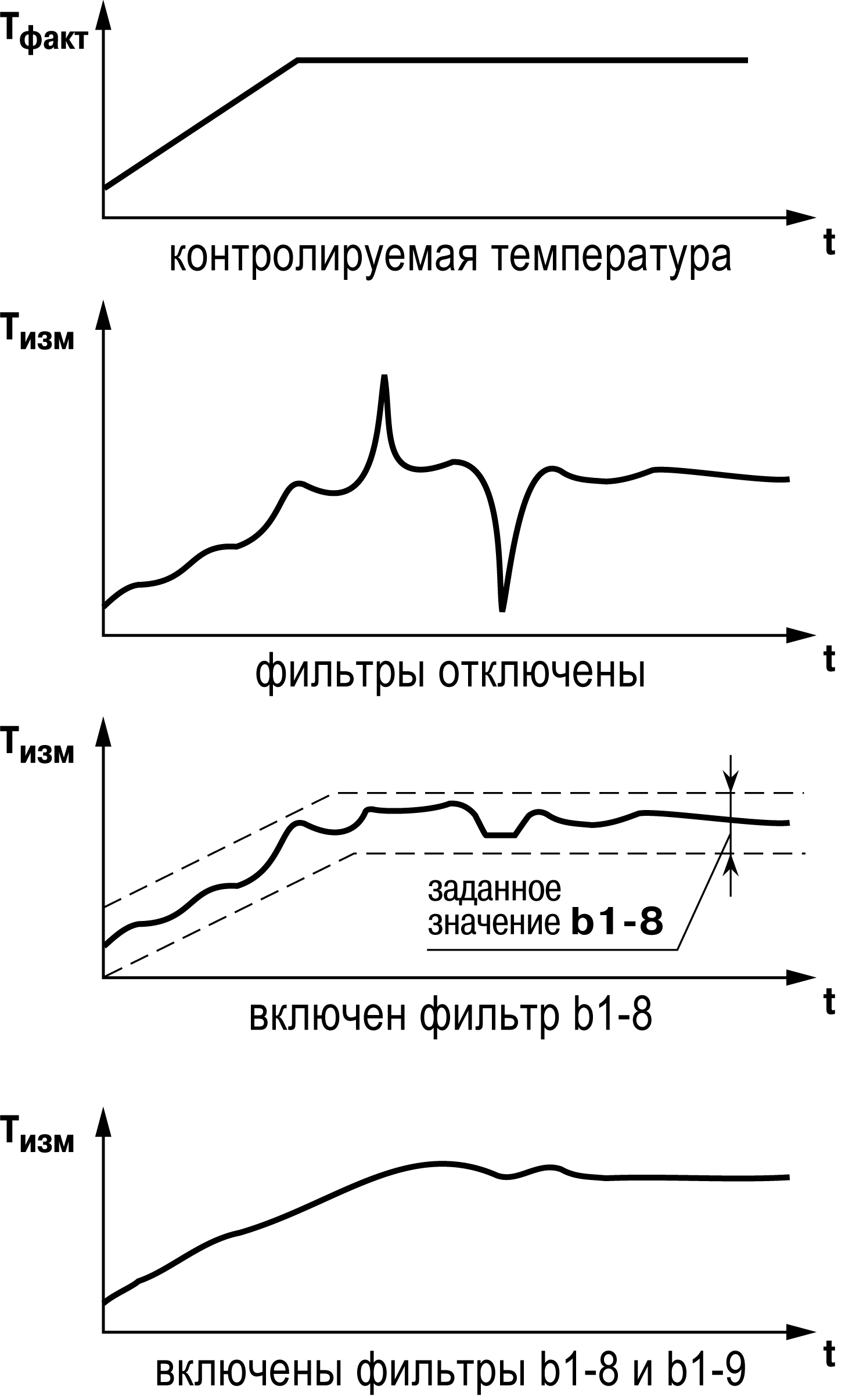
| b1-8 | Полоса цифрового фильтра первого канала | 0,0…30,0 | [ед.
изм.] | 30,0 | |
| b1-9 | Постоянная времени цифрового фильтра
первого канала | 0...99 | [с] | 2 | |
| b2-0 | Код типа датчика, работающего на втором
канале | Аналогичны
параметру b1–0 | Аналогичны
параметру b1–0 | 01 | |
| b2-1 | Коррекция сдвиг характеристики для второго входа | –50,0…50,0 | Суммируется
с измеренным значением | 0,0 | |
| b2-2 | Коррекция наклон характеристики для второго входа | 0,900…1,100 | Измеренное
значение умножается на заданный коэффициент | 1,000 | |
| b2-3 | Режим работы вычислителя квадратного
корня по второму входу | oFF | Выключен | oFF | |
| on | Включен |
| b2-4 | Источник компенсации ХС входа 2 | 0 | Внутренний
датчик | 0 | |
| 1 | Вход
1 |
| b2-5 | Показание
прибора для нижнего предела унифицированного входного сигнала второго
входа | –999…9999 | Масштабируется
умножением на коэффициент 10-Х, где Х - значение параметра b2-7. | 0,0 | |
| b2-6 | Показание прибора для верхнего предела
унифицированного входного сигнала второго входа | –999…9999 | Масштабируется
умножением на коэффициент 10-Х, где Х - значение параметра b2-7. | 100,0 | |
| b2-7 | Положение десятичной точки при индикации
параметров второго канала | 0,
1, 2 и 3 | Влияет на значения параметров b2-5 и b2-6. | 1 | |
| b2-8 | Полоса цифрового фильтра второго канала | 0.0…30,0 | [ед.
изм.] | 30 | |
| b2-9 | Постоянная времени цифрового фильтра
второго канала | 0...99 | [с] | 2 | |
 Предупреждение ПредупреждениеПараметры b1-3…b1-6 (b2-3…b2-6) доступны для редактирования, если на входе используется
унифицированный датчик (соответствует значению параметра b1-0 (b2-0) = 06, 10…13) |