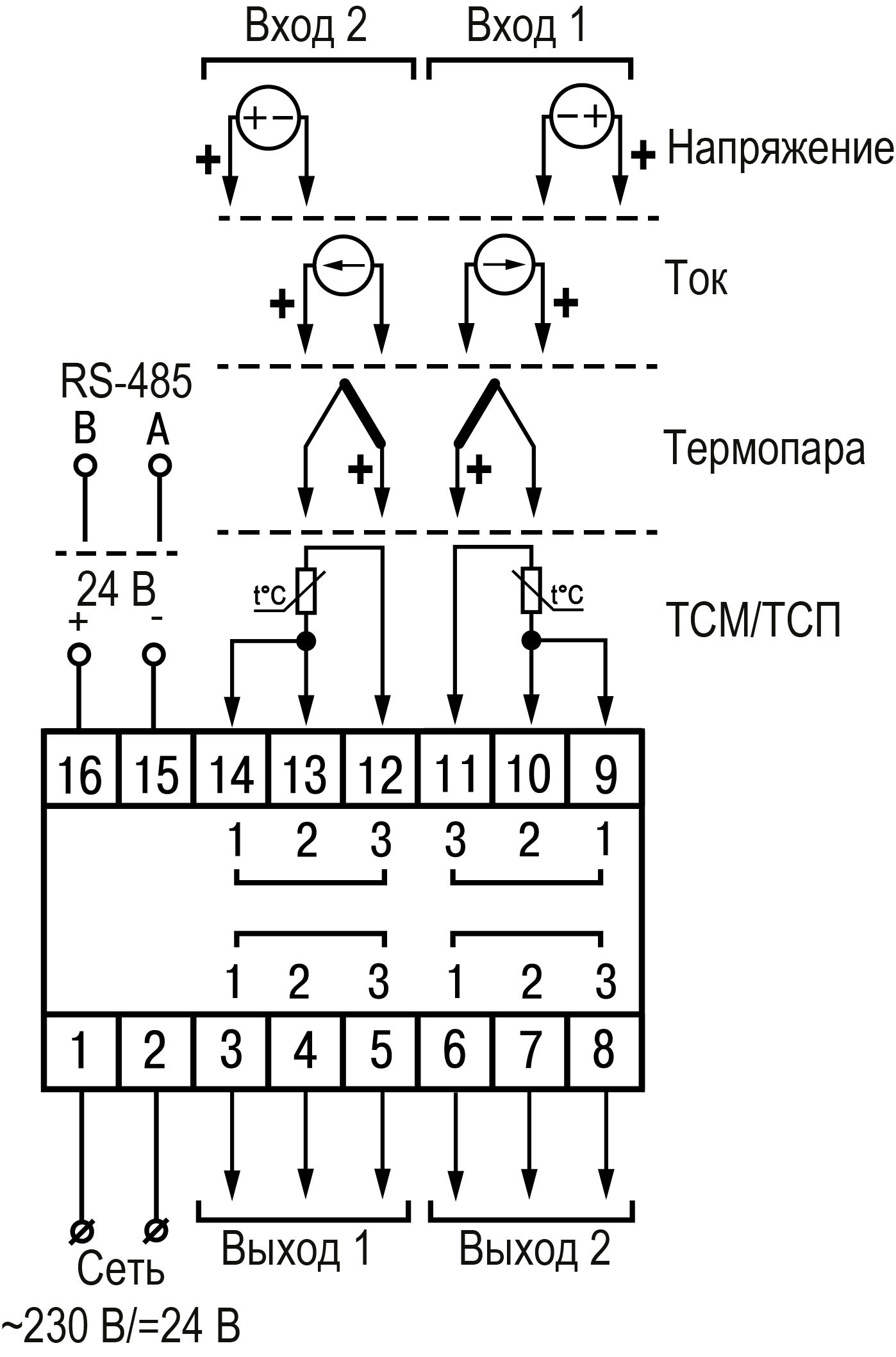
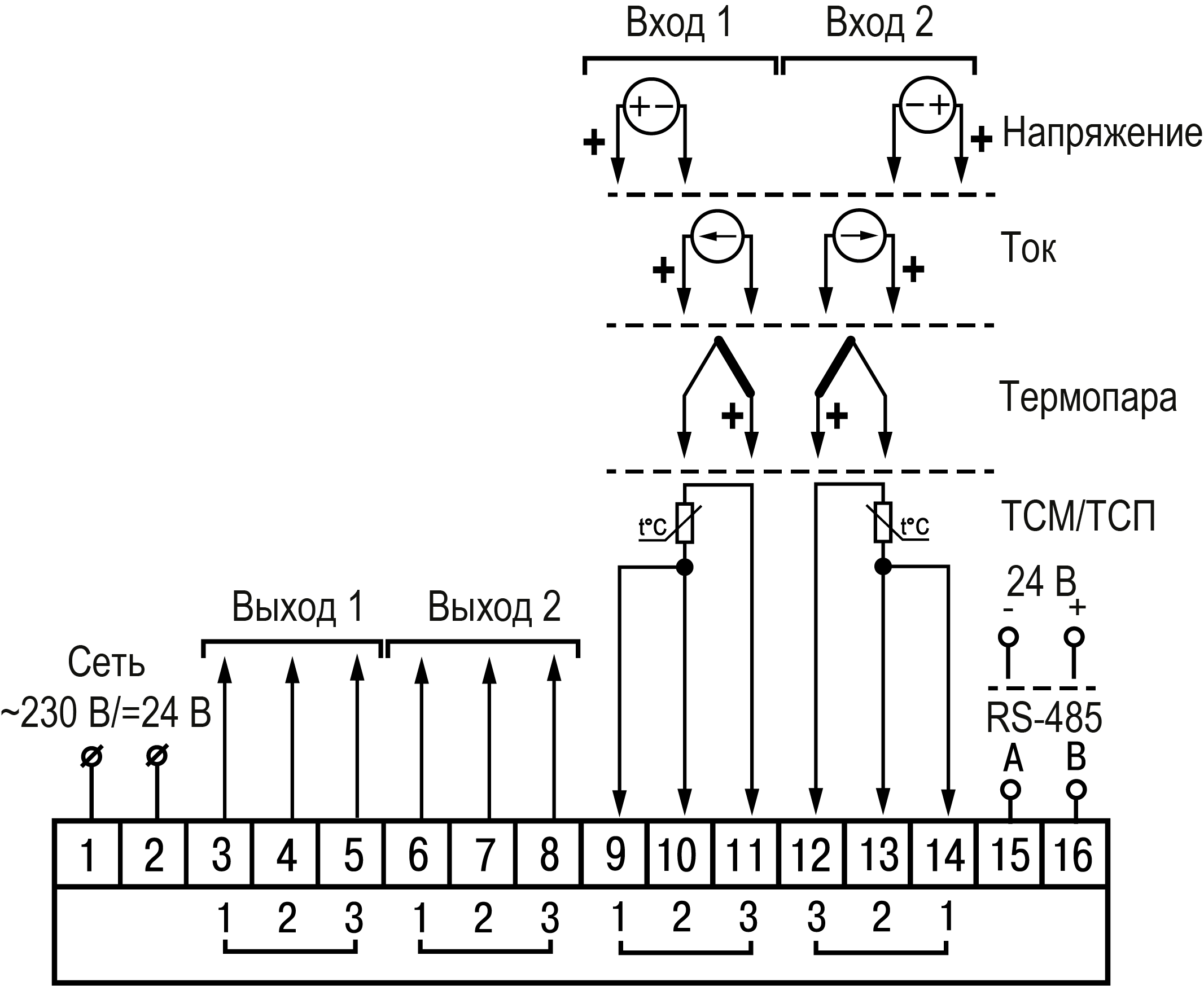
Вход 1 |
Fun1 | Измеренная величина на входе (после
функции) | 0000 | R | FLOAT32 | |
PV1 | Входная величина на входе (до функции) | 0002 | R | FLOAT32 | |
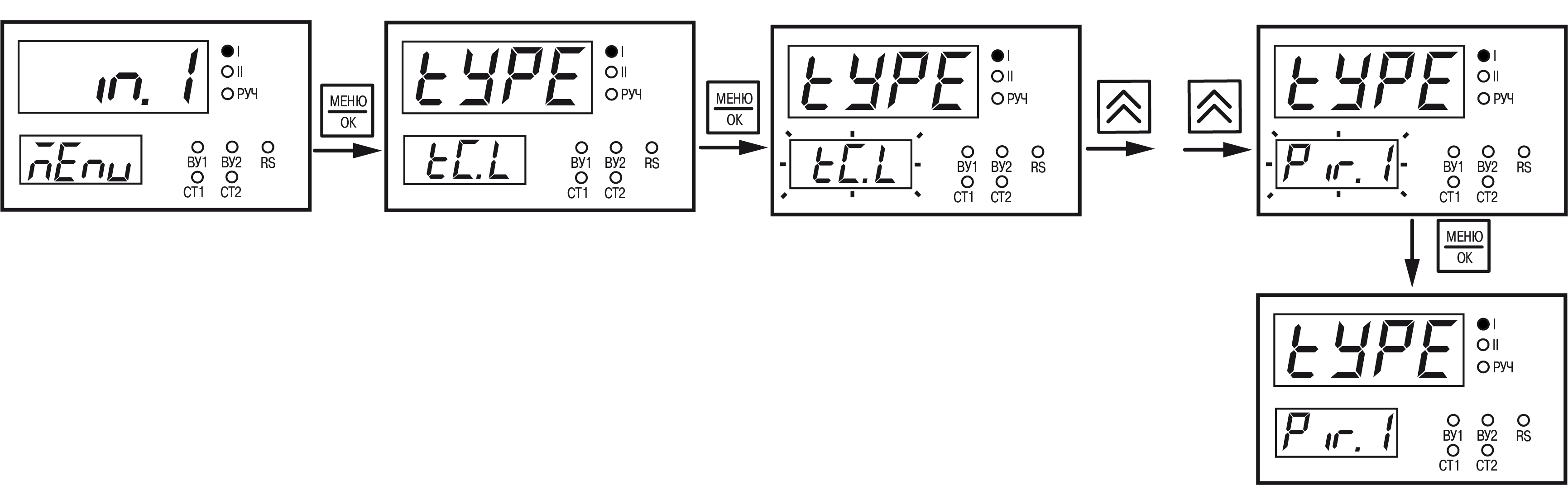
tYPE | Тип датчика на входе | 0004 | R/W | UINT16 | oFF | 0 |
| |
С 50 | 1 |
С 53 | 2 |
С100 | 3 |
С500 | 4 |
С 1.0 | 5 |
50 С | 6 |
100С | 7 |
500С | 8 |
1.0 С | 9 |
P 50 | 10 |
P100 | 11 |
P500 | 12 |
P 1.0 | 13 |
50 P | 14 |
100P | 15 |
500P | 16 |
1.0 P | 17 |
100n | 18 |
500n | 19 |
1.0 n | 20 |
tC.L | 21 |
tC.HA | 22 |
tC.J | 23 |
tC.n | 24 |
tC.t | 25 |
tC.S | 26 |
tC.r | 27 |
tC.b | 28 |
tC.A1 | 29 |
tC.A2 | 30 |
tC.A3 | 31 |
tC.dL | 32 |
tC.E | 33 |
PIr.1 | 34 |
PIr.2 | 35 |
PIr.3 | 36 |
PIr.4 | 37 |
I 0.5 | 38 |
I0.20 | 39 |
I4.20 | 40 |
U-5.5 | 41 |
U 0.1 | 42 |
|
|
|
|
|
| U 5 | 43 |
| U 10 | 44 |
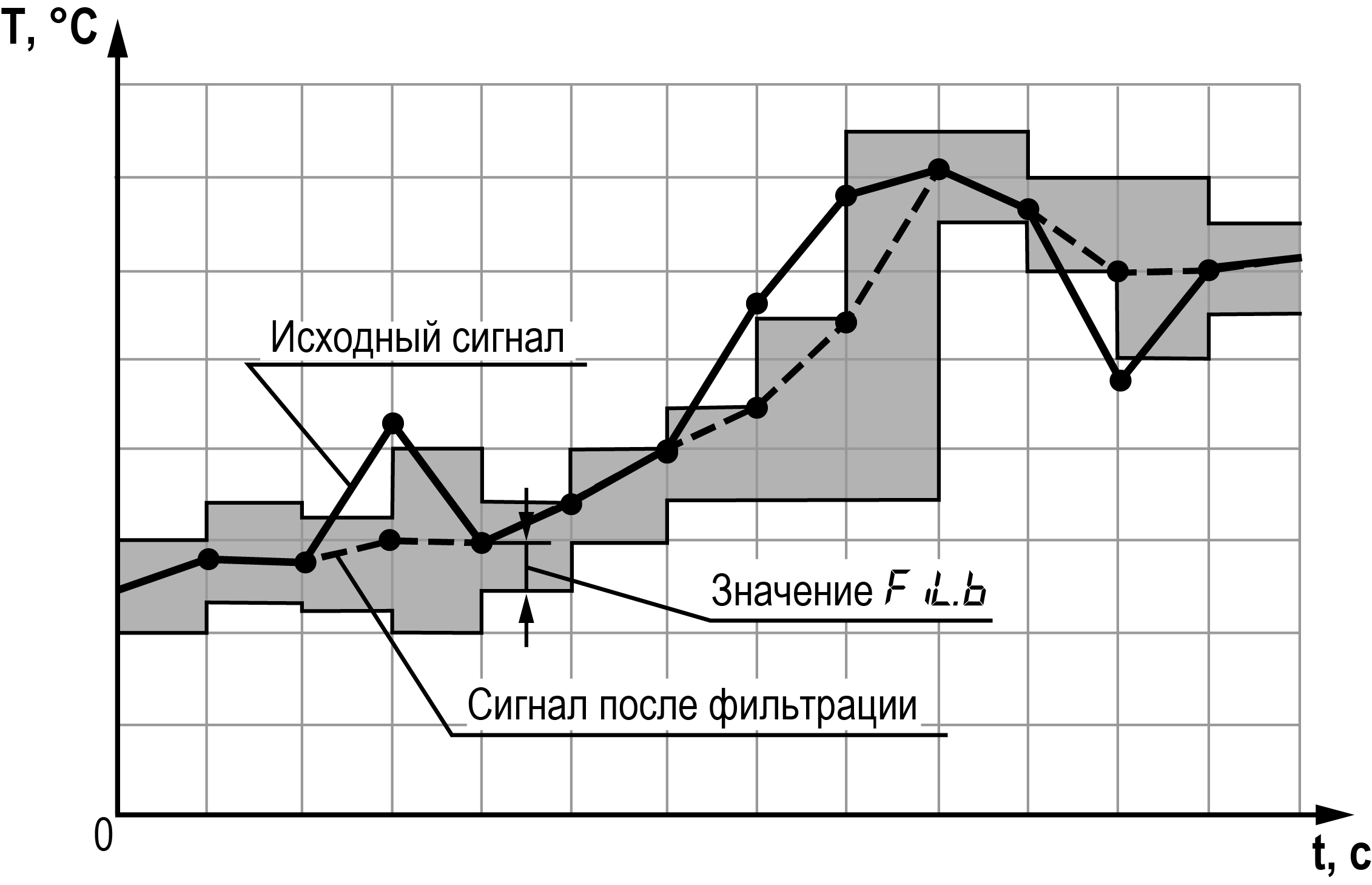
FiL.b | Полоса фильтра | 0005 | R/W | FLOAT32 | oFF, DeltaSens* |
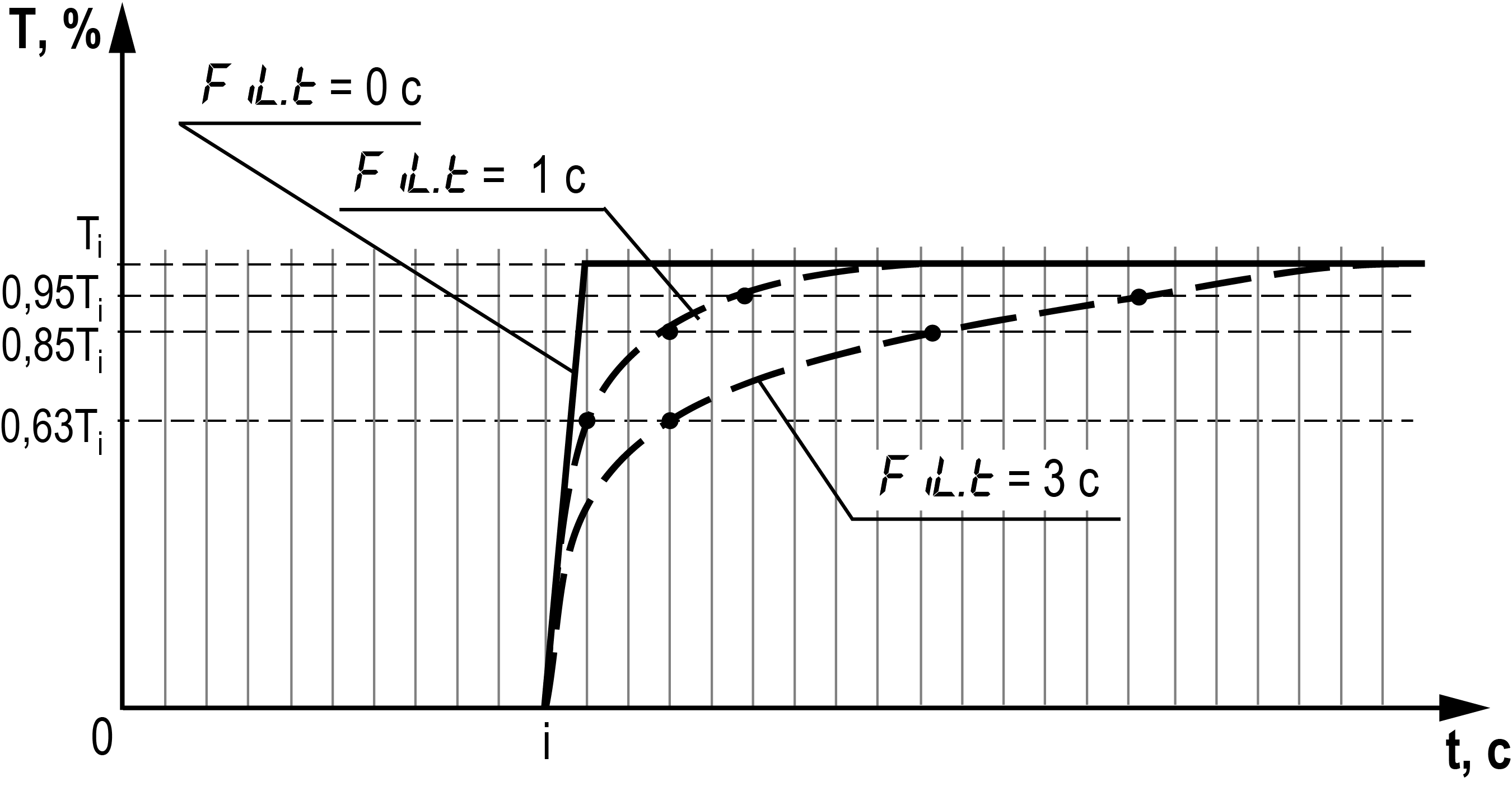
FiL.t | Постоянная времени фильтра | 0007 | R/W | UINT16 | oFF, 1...999 |
dPt | Положение десятичной точки | 0008 | R/W | UINT16 | 0 | 0 |
1 | 1 |
2 | 2 |
3 | 3 |
Auto | 4 |
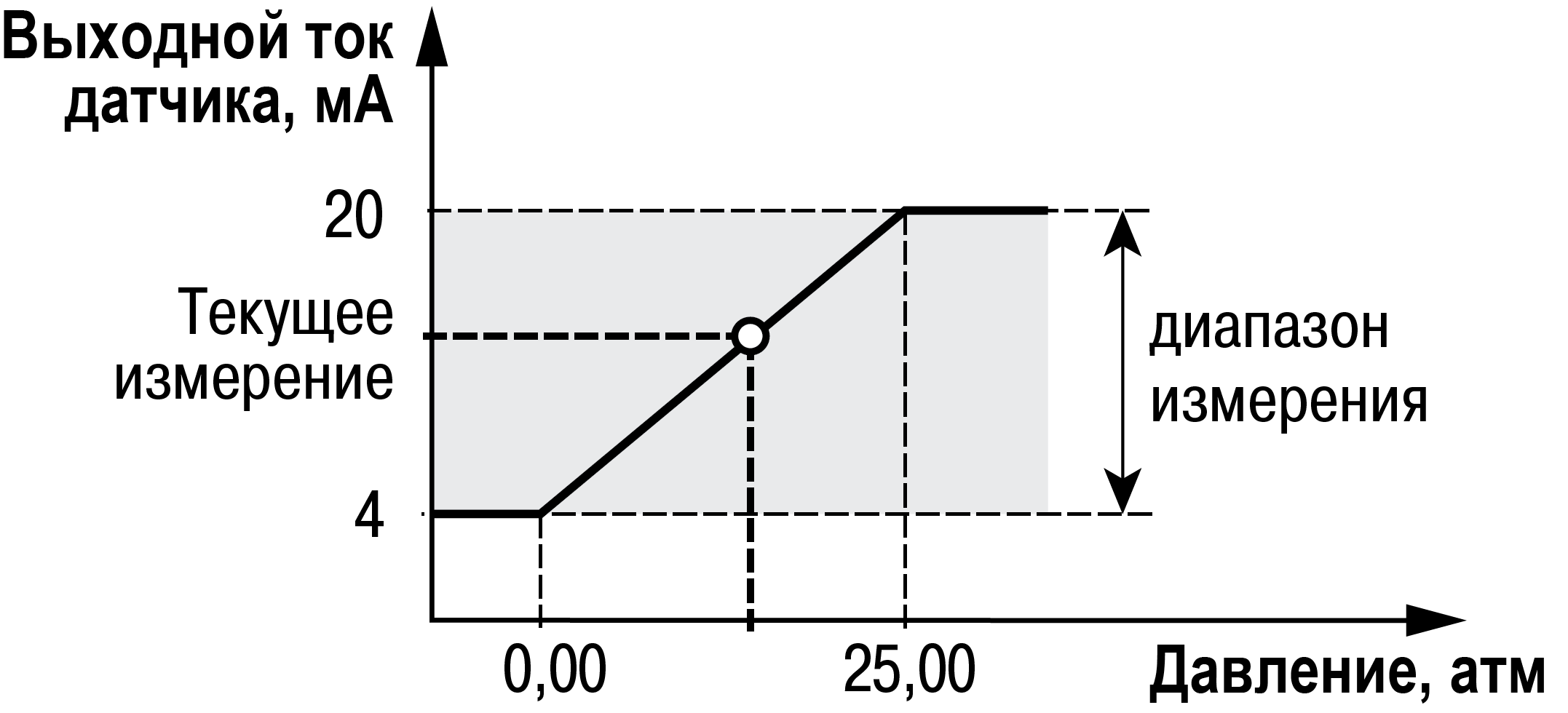
Ind.L | Нижний порог приведения значения входа | 0009 | R/W | FLOAT32 | –1999...9999 |
Ind.H | Верхний порог приведения значения
входа | 000В | R/W | FLOAT32 | –1999...9999 |
FunC | Тип математической функции | 000D | R/W | UINT16 | oFF | 0 |
| SQrt | 1 |
| SQri | 2 |
| SUM | 3 |
| DIFF | 4 |
| ASUM | 5 |
| SQSM | 6 |
| rAt | 7 |
CF.1 | Коэффициент 1 взвешенной суммы | 000E | R/W | FLOAT32 | -100.0...100.0 |
CF.2 | Коэффициент 2 взвешенной суммы | 0010 | R/W | FLOAT32 | -100.0...100.0 |
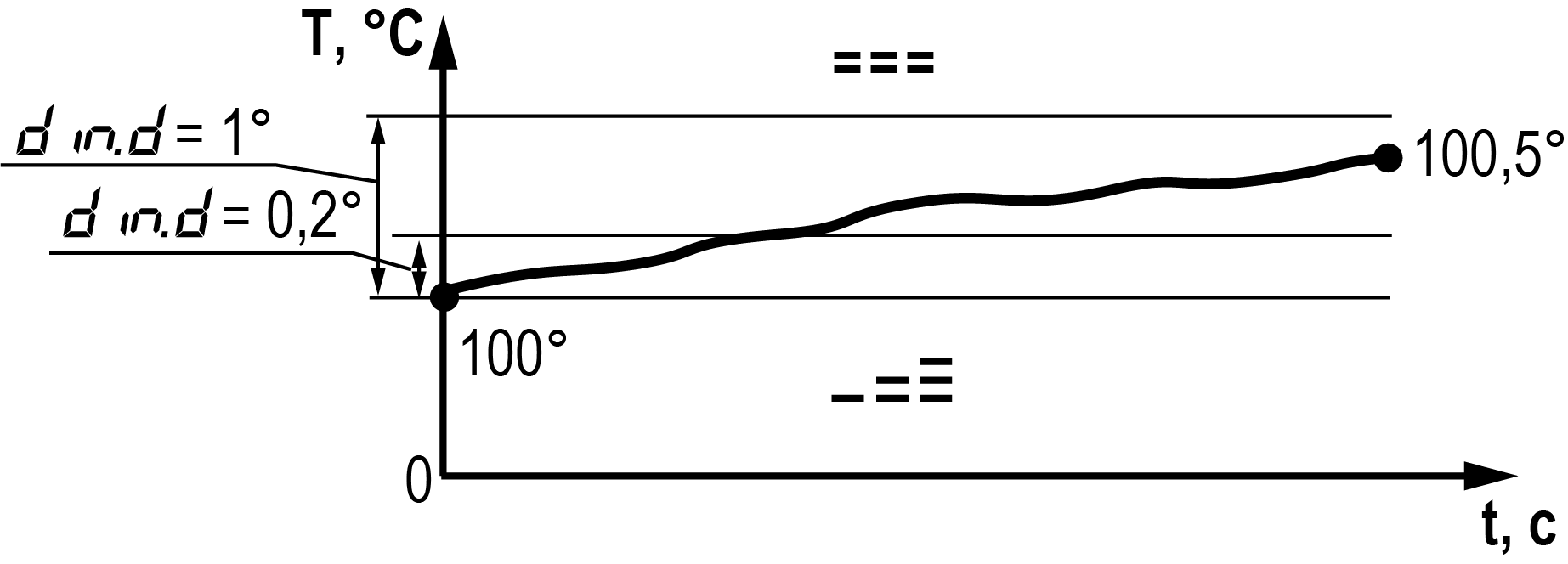
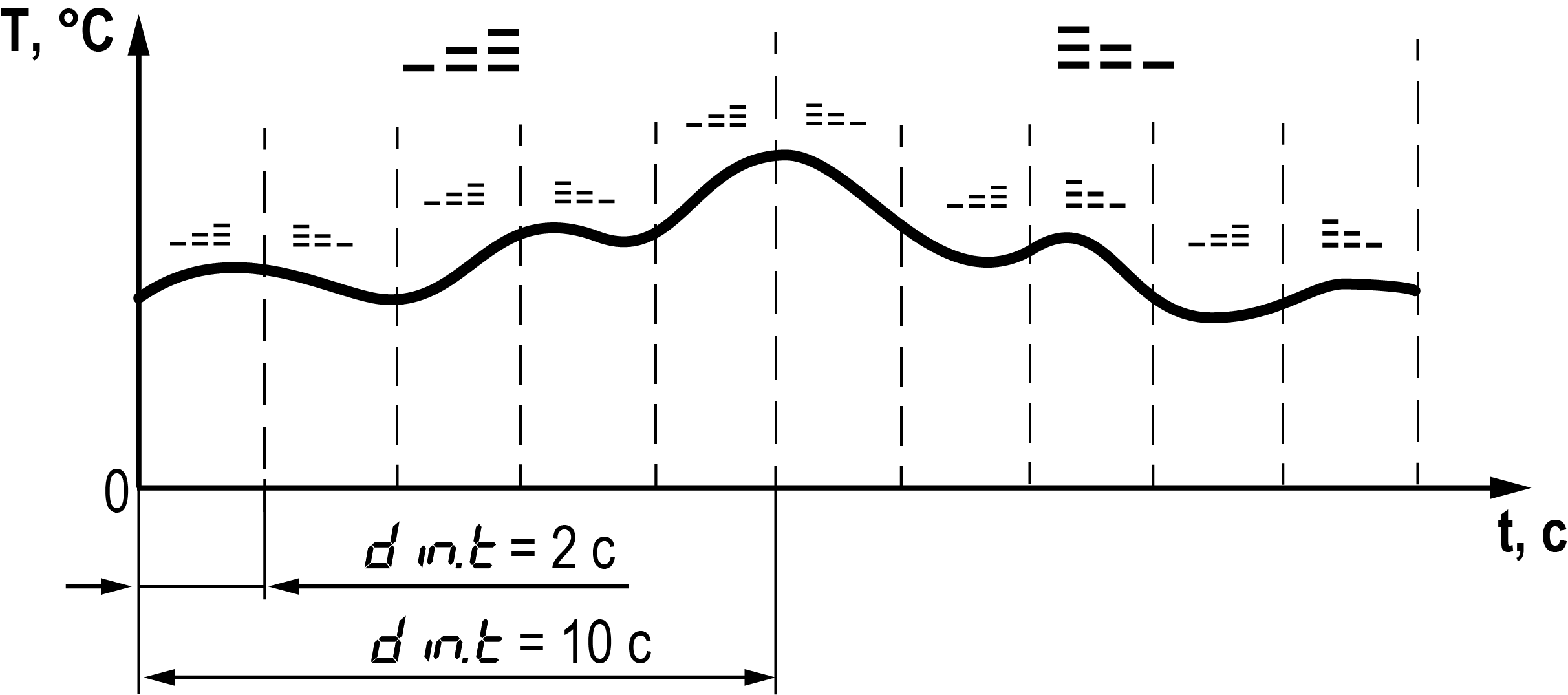
dIn.t | Период анализа динамики изменения
сигнала | 0012 | R/W | UINT16 | 0...30 |
dIn.d | Дельта динамики сигнала | 0013 | R/W | FLOAT32 | 0.2...DeltaSens* |
bArr | Подключение барьера искрозащиты | 0015 | R/W | UINT16 | oFF | 0 |
on | 1 |
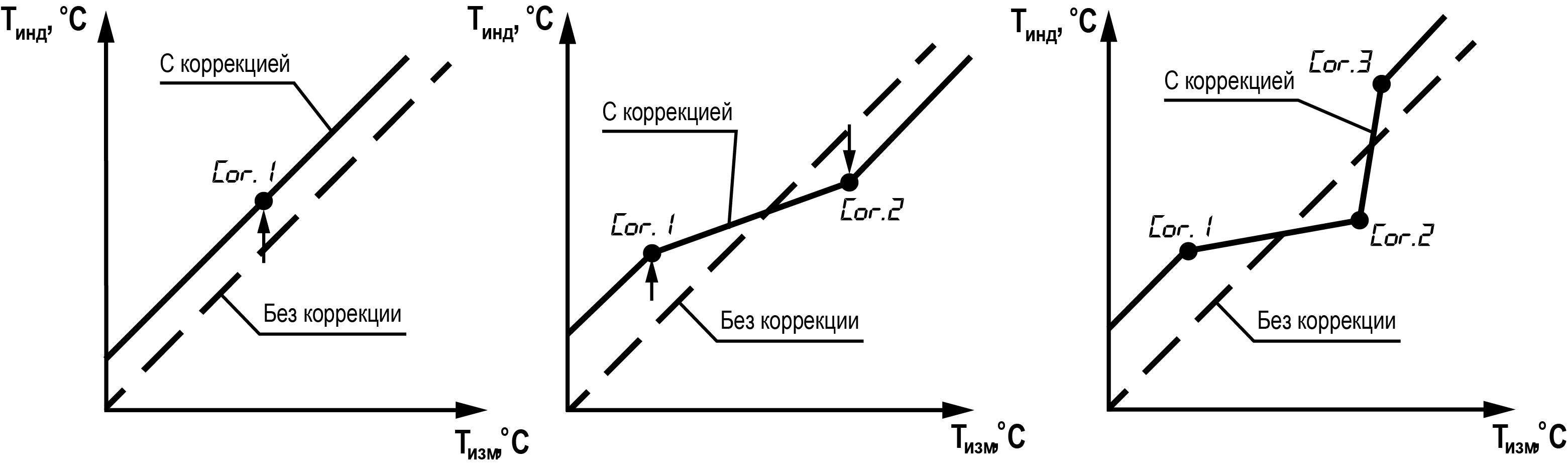
Cor1.PoInt | Значение точки 1 корректировки входа | 0016 | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor1.oFFSEt | Смещение для точки 1 корректировки
входа | 0018 | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor1.cLr | Сброс коррекции точки 1 | 001A | R/W | UINT16 | 0 | 0 |
1 | 1 |
Cor2.PoInt | Значение точки 2 корректировки входа | 001В | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor2.oFFSEt | Смещение для точки 2 корректировки
входа | 001D | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor2.cLr | Сброс коррекции точки 2 | 001F | R/W | UINT16 | 0 | 0 |
1 | 1 |
Cor3.PoInt | Значение точки 3 корректировки входа | 0020 | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor3.oFFSEt | Смещение для точки 3 корректировки
входа | 0022 | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor3.cLr | Сброс коррекции точки 3 | 0024 | R/W | UINT16 | 0 | 0 |
1 | 1 |
Вход 2 |
FUN2 | Измеренная величина на Входе (после
функции) | 0100 | R | FLOAT32 | –9999...9999 |
PV2 | Входная величина на Входе (до функции) | 0102 | R | FLOAT32 | –9999...9999 |
tYPE | Тип датчика на входе | 0104 | R/W | UINT16 | oFF | 0 |
|
С 50 | 1 |
С 53 | 2 |
С100 | 3 |
С500 | 4 |
С 1.0 | 5 |
50 С | 6 |
100С | 7 |
500С | 8 |
1.0 С | 9 |
P 50 | 10 |
P100 | 11 |
P500 | 12 |
P 1.0 | 13 |
50 P | 14 |
100P | 15 |
500P | 16 |
1.0 P | 17 |
100n | 18 |
500n | 19 |
1.0 n | 20 |
tC.L | 21 |
tC.HA | 22 |
tC.J | 23 |
tC.n | 24 |
tC.t | 25 |
tC.S | 26 |
tC.r | 27 |
tC.b | 28 |
tC.A1 | 29 |
tC.A2 | 30 |
tC.A3 | 31 |
tC.dL | 32 |
tC.E | 33 |
PIr.1 | 34 |
PIr.2 | 35 |
PIr.3 | 36 |
PIr.4 | 37 |
I 0.5 | 38 |
I0.20 | 39 |
I4.20 | 40 |
U-5.5 | 41 |
U 0.1 | 42 |
| U 5 | 43 |
| U 10 | 44 |
D.StP | 45 |
D.Man | 46 |
| d.BLc | 47 |
PoS.r | 48 |
PoS.I | 49 |
FiL.b | Полоса фильтра | 0105 | R/W | FLOAT32 | oFF, DeltaSens* |
FiL.t | Постоянная времени фильтра | 0107 | R/W | UINT16 | oFF, 1...999 |
dPt | Положение десятичной точки | 0108 | R/W | UINT16 | 0 | 0 |
1 | 1 |
2 | 2 |
3 | 3 |
Auto | 4 |
Ind.L | Верхний порог приведения значения
входа | 0109 | R/W | FLOAT32 | –1999...9999 |
Ind.H | Нижний порог приведения значения входа | 010В | R/W | FLOAT32 | –1999...9999 |
FunC | Тип математической функции | 010D | R/W | UINT16 | oFF | 0 |
| SQrt | 1 |
| SQri | 2 |
| SUM | 3 |
| DIFF | 4 |
| ASUM | 5 |
| SQSM | 6 |
| rAt | 7 |
CF.1 | Коэффициент 1 взвешенной суммы | 010E | R/W | FLOAT32 | -100.0...100.0 |
CF.2 | Коэффициент 2 взвешенной суммы | 0110 | R/W | FLOAT32 | -100.0...100.0 |
dIn.t | Период анализа динамики изменения
сигнала | 0112 | R/W | UINT16 | 0...30 |
dIn.d | Дельта динамики сигнала | 0113 | R/W | FLOAT32 | 0.2...DeltaSens* |
bArr | Подключение барьера искрозащиты | 0115 | R/W | UINT16 | oFF | 0 |
| on | 1 |
Cor1.PoInt | Значение точки 1 корректировки входа | 0116 | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor1.oFFSEt | Смещение для точки 1 корректировки
входа | 0118 | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor1.cLr | Сброс коррекции точки 1 | 011A | R/W | UINT16 | 0 | 0 |
1 | 1 |
Cor2.PoInt | Значение точки 2 корректировки входа | 011В | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor2.oFFSEt | Смещение для точки 2 корректировки
входа | 011D | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor2.cLr | Сброс коррекции точки 2 | 011F | R/W | UINT16 | 0 | 0 |
1 | 1 |
Cor3.PoInt | Значение точки 3 корректировки входа | 0120 | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor3.oFFSEt | Смещение для точки 3 корректировки
входа | 0122 | R/W | FLOAT32 | oFF, SensMin... SensMax* |
Cor3.cLr | Сброс коррекции точки 3 | 0124 | R/W | UINT16 | 0 | 0 |
1 | 1 |
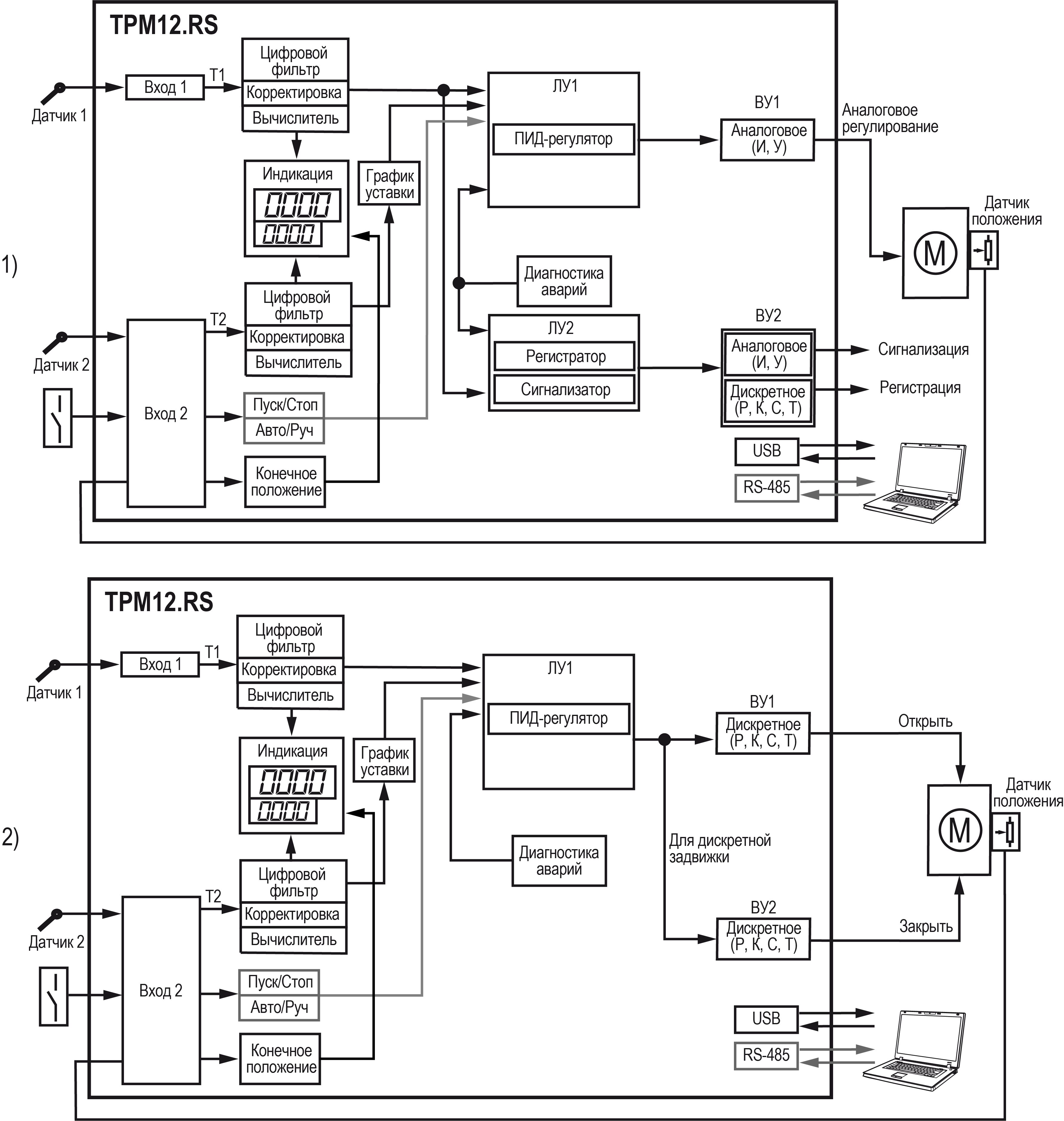
Выход 1 (общее) |
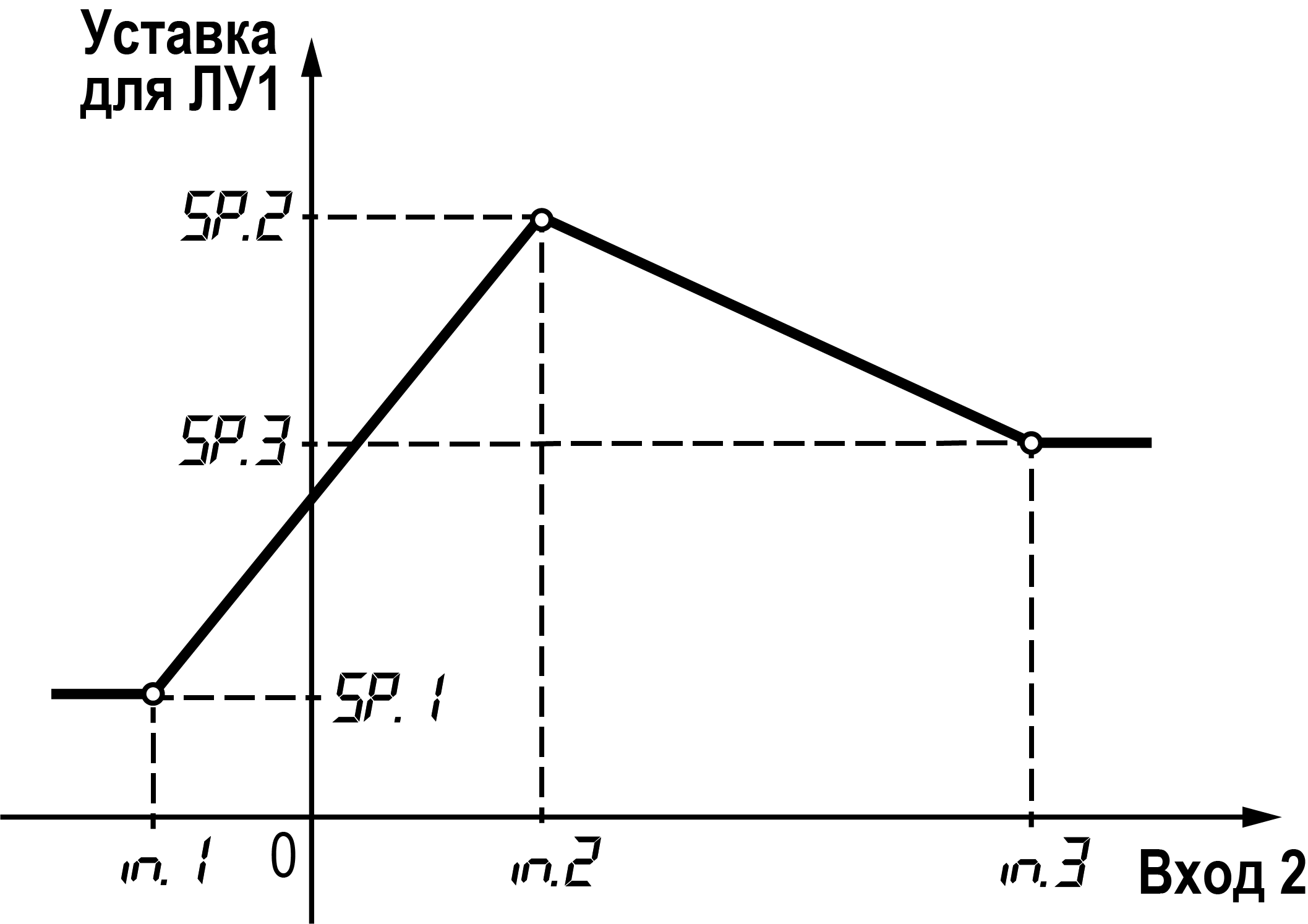
SP | Уставка регулятора на выходе | 0200 | R/W | FLOAT32 | SP.Lo ... SP.Hi |
SP.Lo | Нижняя граница уставки | 0202 | R/W | FLOAT32 | SensMin*...SP.Hi |
SP.HI | Верхняя граница уставки | 0204 | R/W | FLOAT32 | SensMin*...SP.Hi |
out.P | Положение задвижки | 0206 | R/W | FLOAT32 | 0...100.0 |
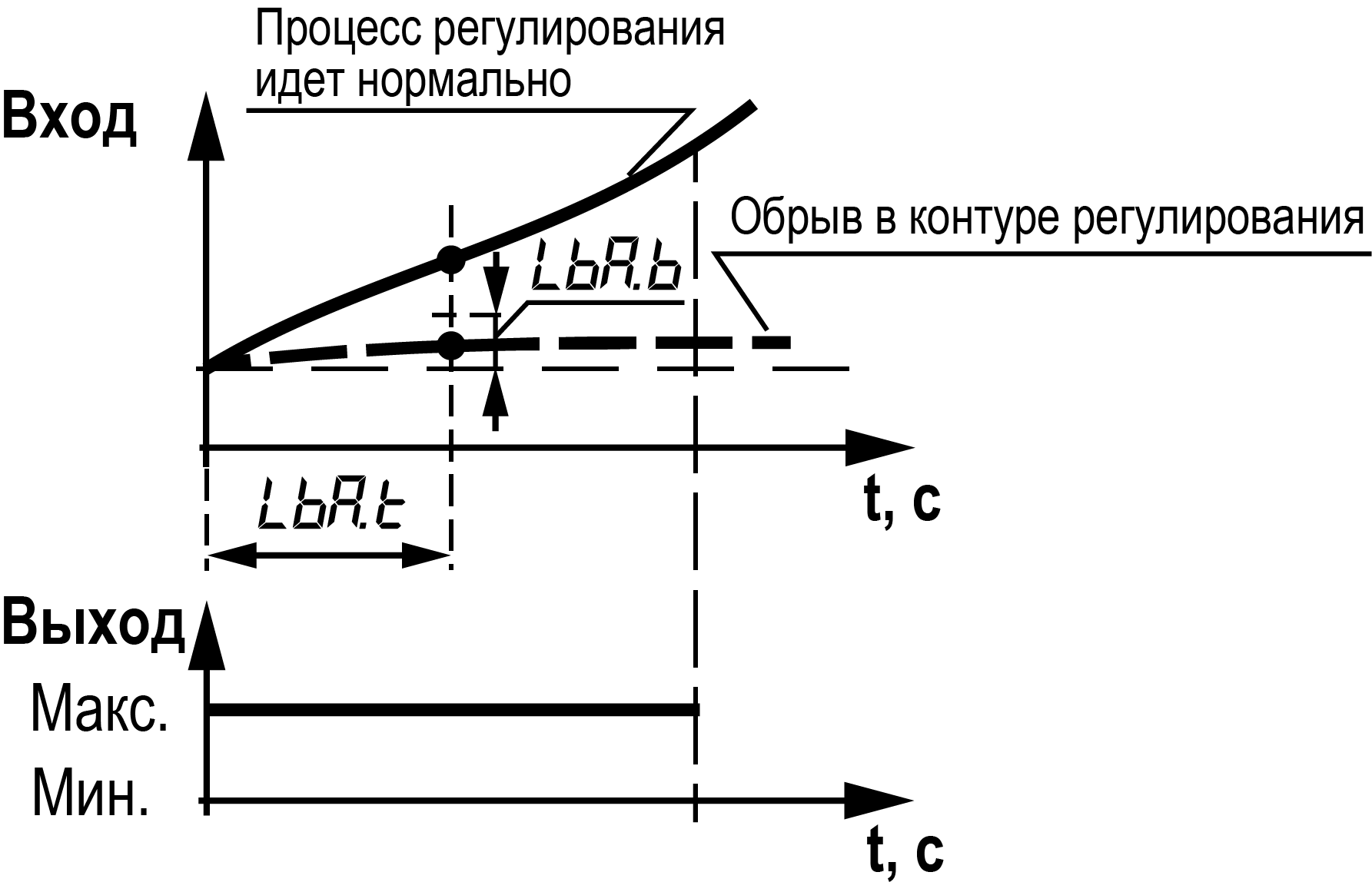
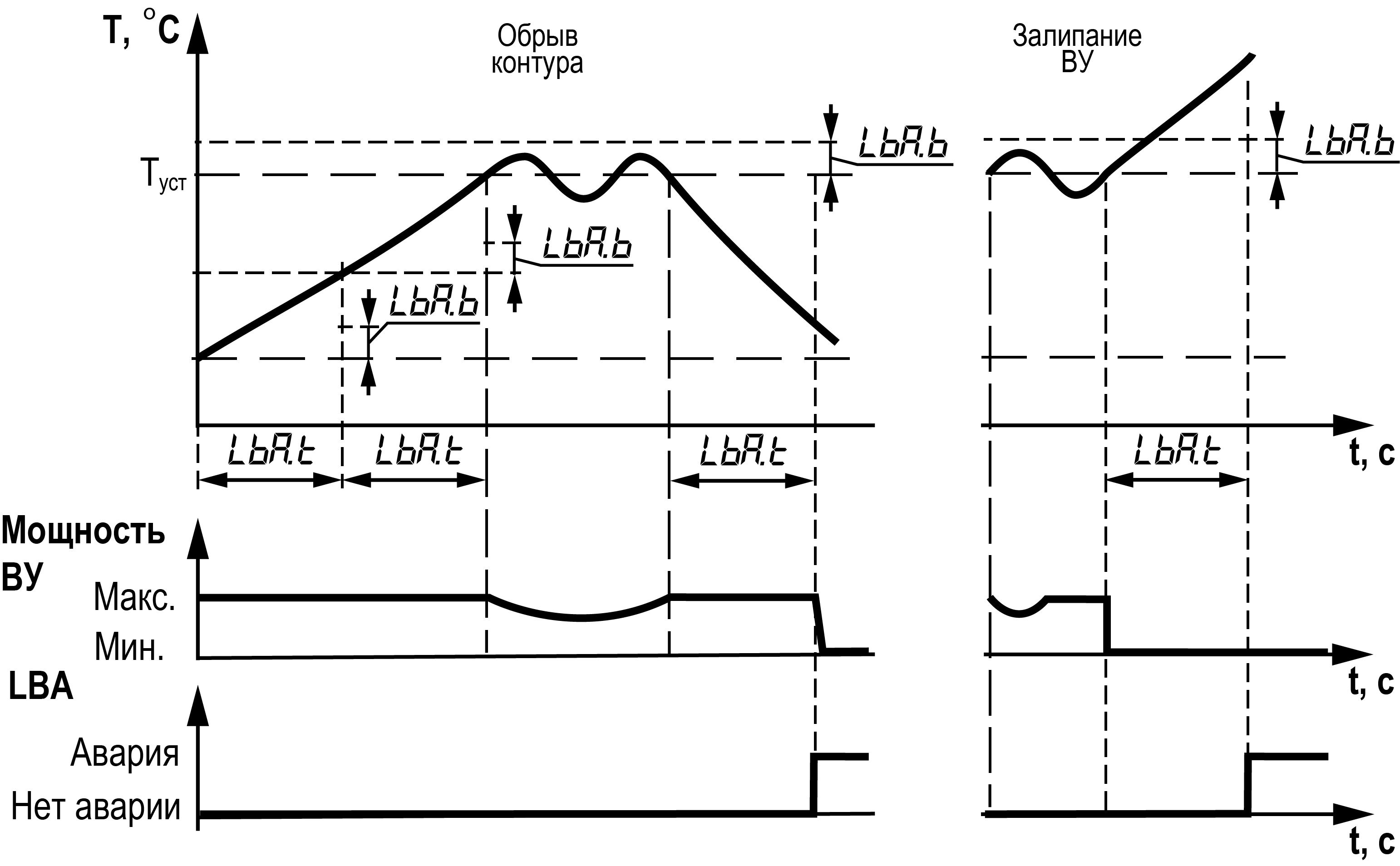
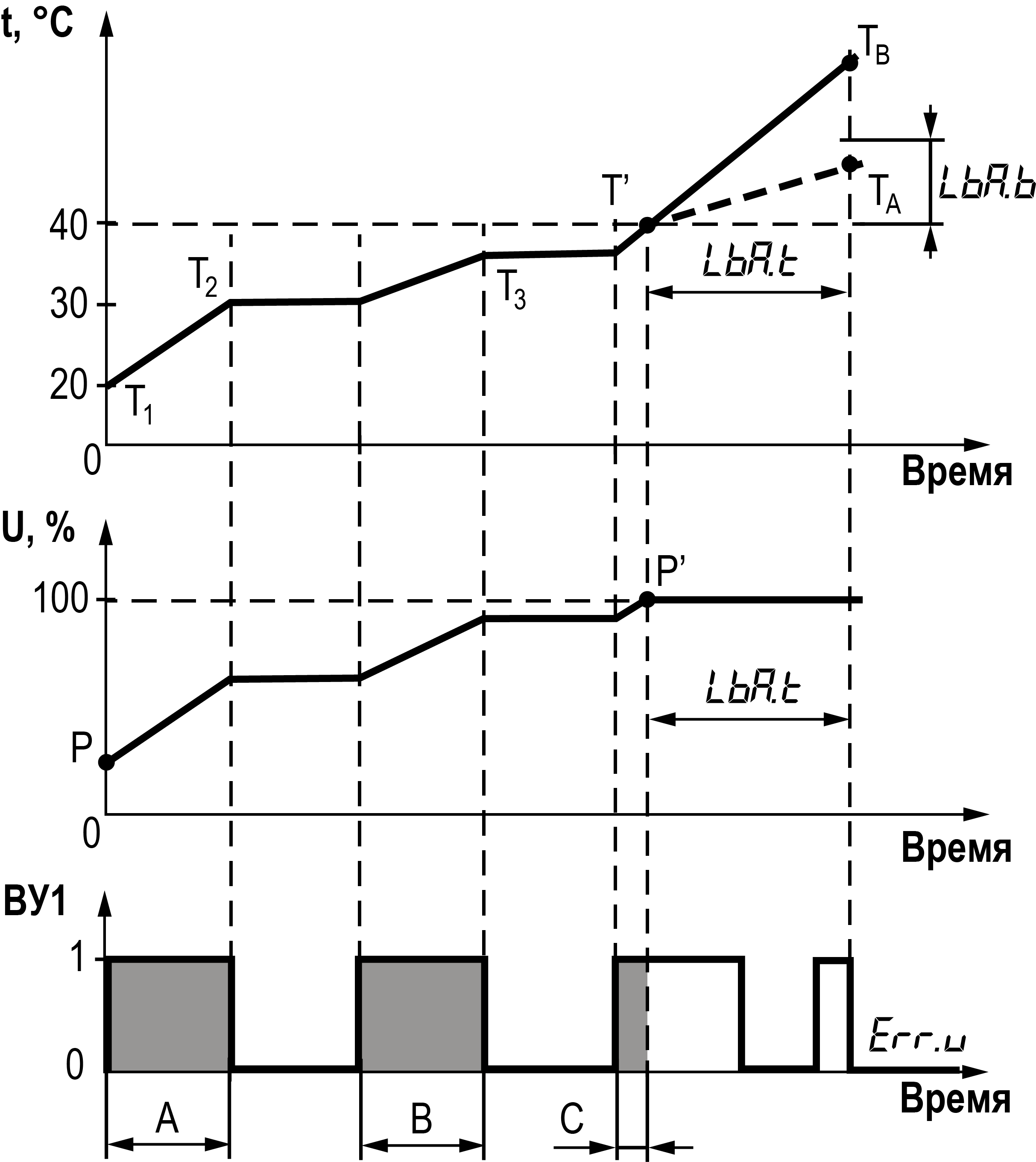
LbA.t | Время диагностики обрыва контура | 0208 | R/W | UINT16 | oFF 1...9999
с |
LbA.b | Ширина зоны диагностики обрыва контура | 0209 | R/W | FLOAT32 | 0...DeltaSens* |
A.rEC | Автоматическое восстановление после
аварии | 020B | R/W | UINT16 | oFF | –1 |
0...999
с |
bLC.P | Блокировка регулятора при обрыве датчика
положения | 020C | R/W | UINT16 | oFF | 0 |
oN | 1 |
Выход 1 (дискретный) |
LoG.d | Тип логики работы ЛУ | 0220 | R/W | UINT16 | oFF | 0 |
H.Pid | 4 |
C.Pid | 5 |
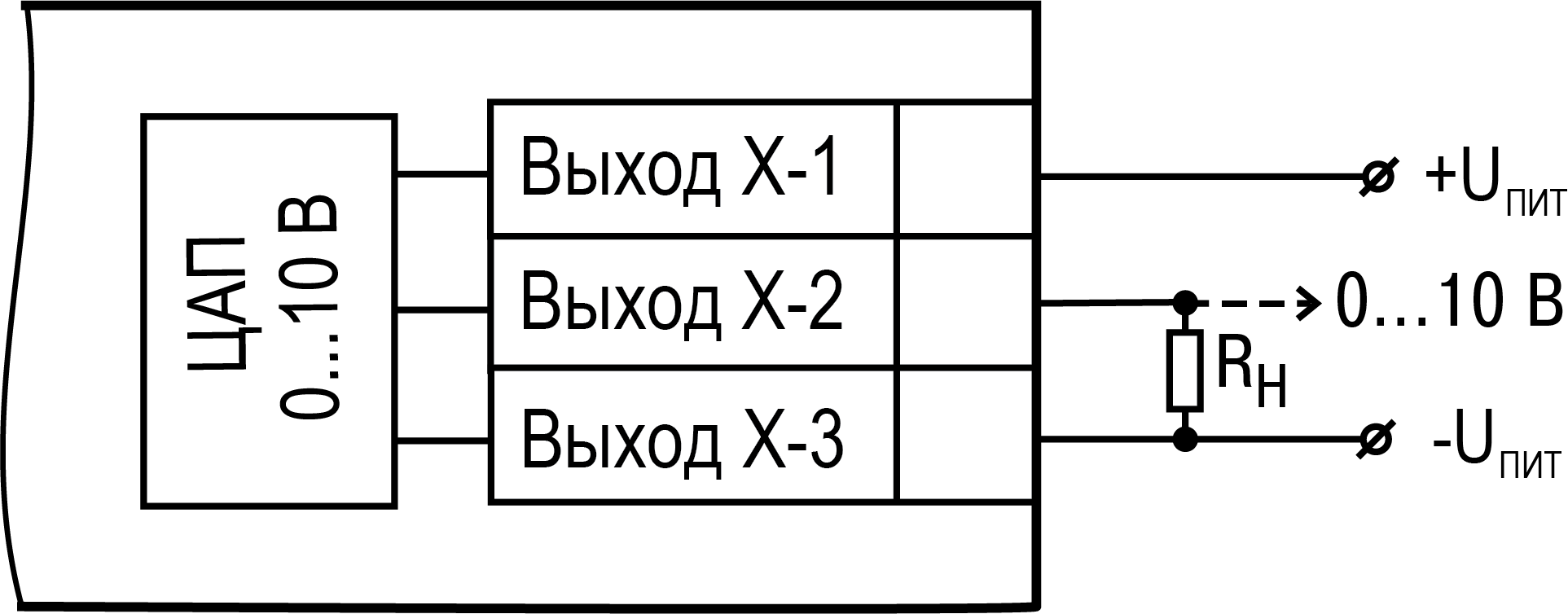
Выход 1 (аналоговый) |
LoG.A | Тип логики работы ЛУ | 0260 | R/W | UINT16 | oFF | 0 |
C.Pid | 1 |
H.Pid | 2 |
|
Выход 1 (ПИД-регулятор) |
Pid.P | Полоса пропорциональности ПИД-регулятора | 0280 | R/W | FLOAT32 | 0.001...9999 |
Pid.I | Интегральная постоянная ПИД-регулятора | 0282 | R/W | UINT16 | 0..3999 с |
Pid.d | Дифференциальная постоянная ПИД-регулятора | 0283 | R/W | UINT16 | 0..3999 с |
VSP | Скорость изменения уставки ПИД-регулятора | 0285 | R/W | FLOAT32 | oFF...DeltaSens* |
d.bnd | Зона
нечувствительности ПИД-регулятора | 0289 | R/W | FLOAT32 | 0...DeltaSens* |
db.d | Минимальный
ход для дискретной задвижки | 028B | R/W | FLOAT32 | 0,02..9,99 |
db.A | Минимальное изменение аналогового ВУ/Минимальный
ход для аналоговой задвижки | 028D | R/W | FLOAT32 | 0...100 % |
oL.L | Минимальная выходная мощность (нижний
предел) ПИД-регулятора | 028F | R/W | FLOAT32 | 0...100.0 |
oL.H | Максимальная выходная мощность (верхний
предел) ПИД-регулятора | 0291 | R/W | FLOAT32 | 0...100.0 |
oL.V | Максимальная скорость изменения выходной
мощности ПИД-регулятора | 0293 | R/W | FLOAT32 | 0.2..100 %/c |
Err.P | Безопасное состояние выхода в режиме Авария | 0295 | R/W | FLOAT32 | 0…100 % |
StP.P | Состояние выхода в режиме Стоп | 0297 | R/W | FLOAT32 | 0…100 % |
Err.V | Значение ВУ1 в режиме Авария в случае использования ПИД-регулятора (Дискретная задвижка) | 0299 | R/W | UINT16 | oFF | 0 |
oN | 1 |
HoLd | 2 |
StP.V | Значение ВУ1 в режиме Стоп в случае использования ПИД-регулятора (Дискретная задвижка) | 029A | R/W | UINT16 | oFF | 0 |
oN | 1 |
HoLd | 2 |
| Выход
2 (общее) |
FunC | Тип математической функции | 030B | R/W | UINT16 | oFF | 0 |
SQrt | 1 |
SuM | 2 |
diFF | 3 |
ASuM | 4 |
SQSM | 5 |
rAt | 6 |
A.rEC | Автоматическое восстановление после
аварии | 020B | R/W | UINT16 | oFF | –1 |
| 0...999 |
Выход 2 (дискретный) |
LoG.d | Тип логики работы ЛУ | 0320 | R/W | UINT16 | oFF | 0 |
|
|
ALrM | 3 |
Err.d | Безопасное состояние выхода в режиме Авария | 0328 | R/W | UINT16 | oN | 0 |
oFF | 1 |
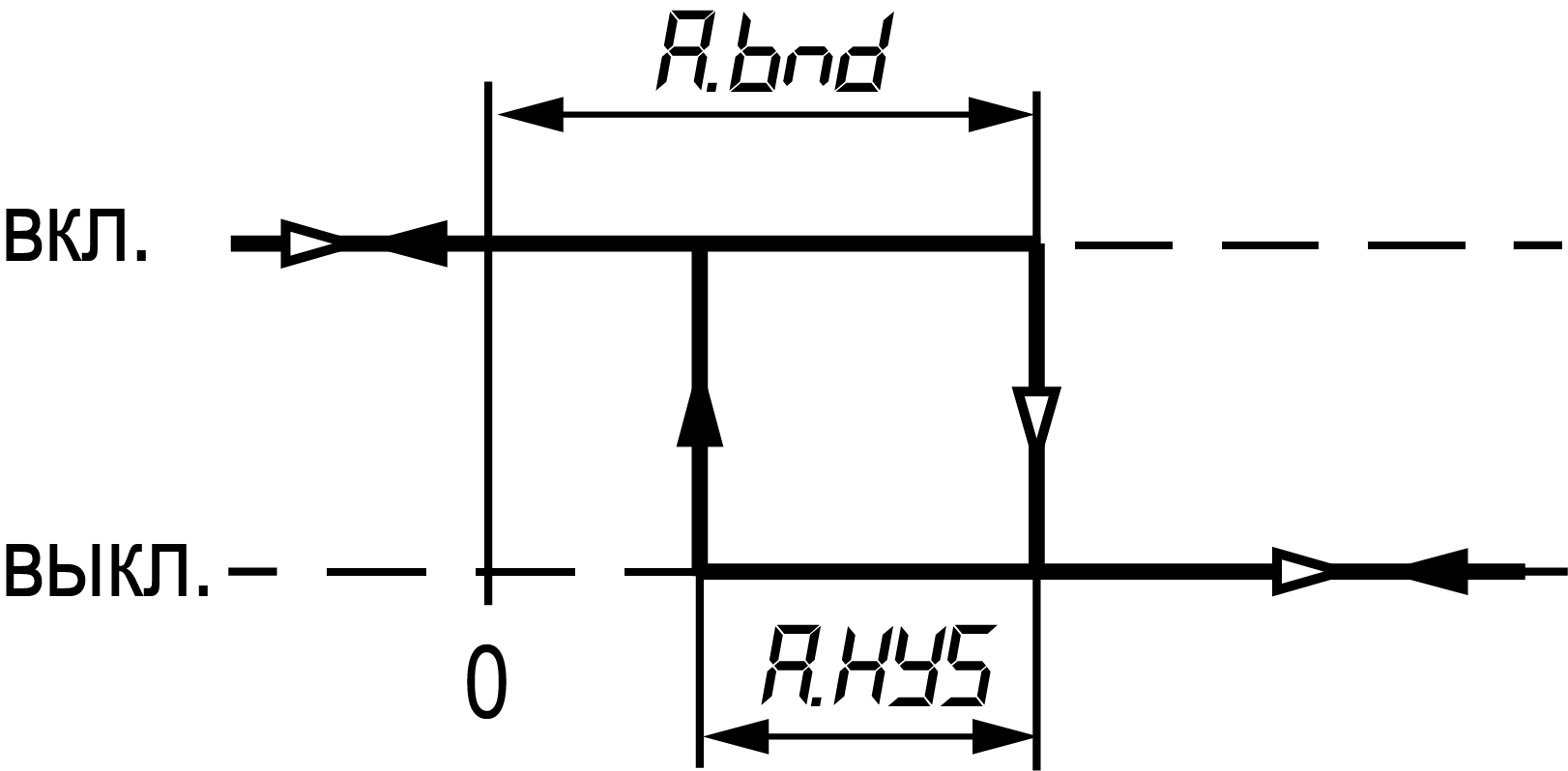
Выход 2 (сигнализатор) Log.d = Alrm в группе out.2 |
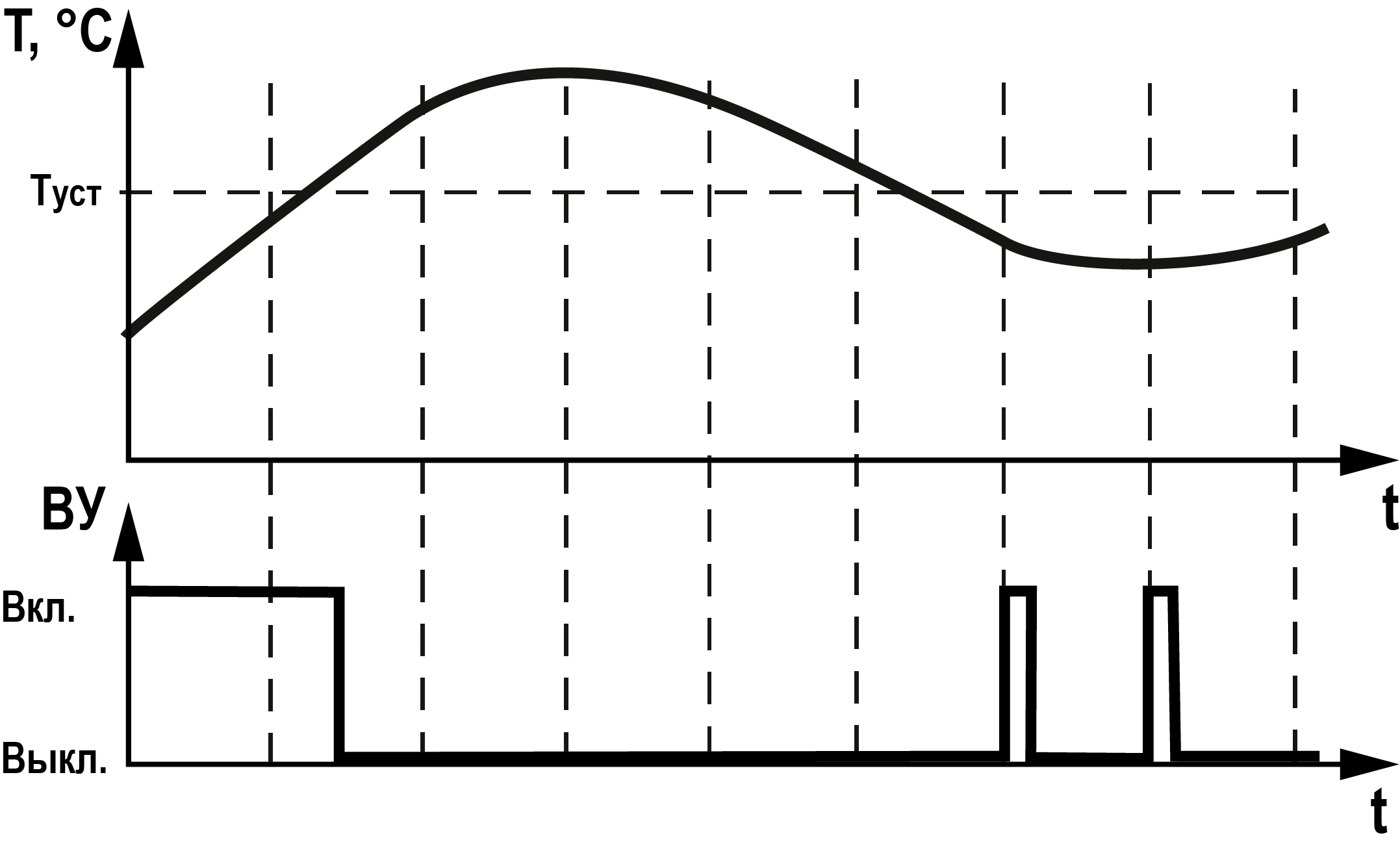
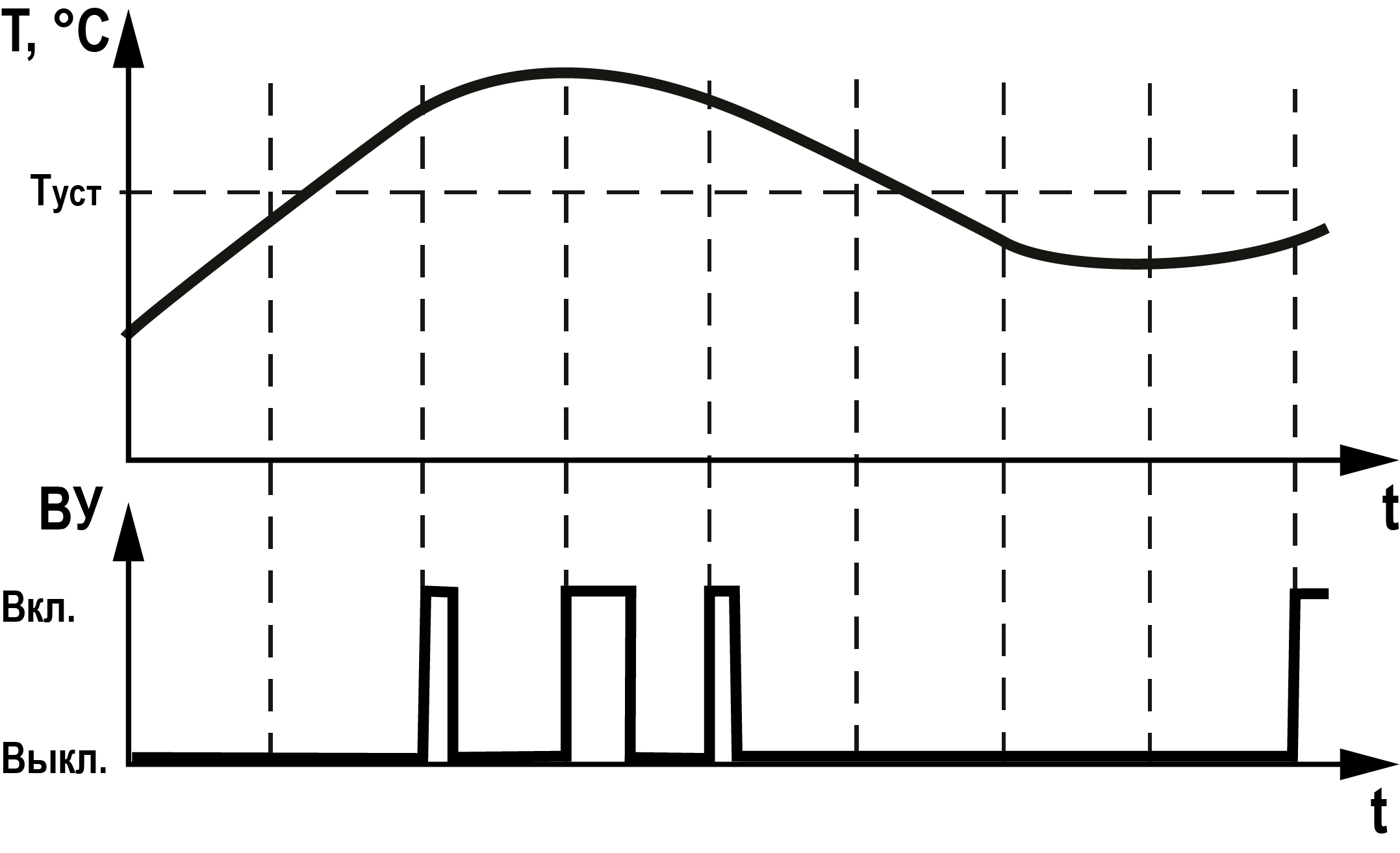
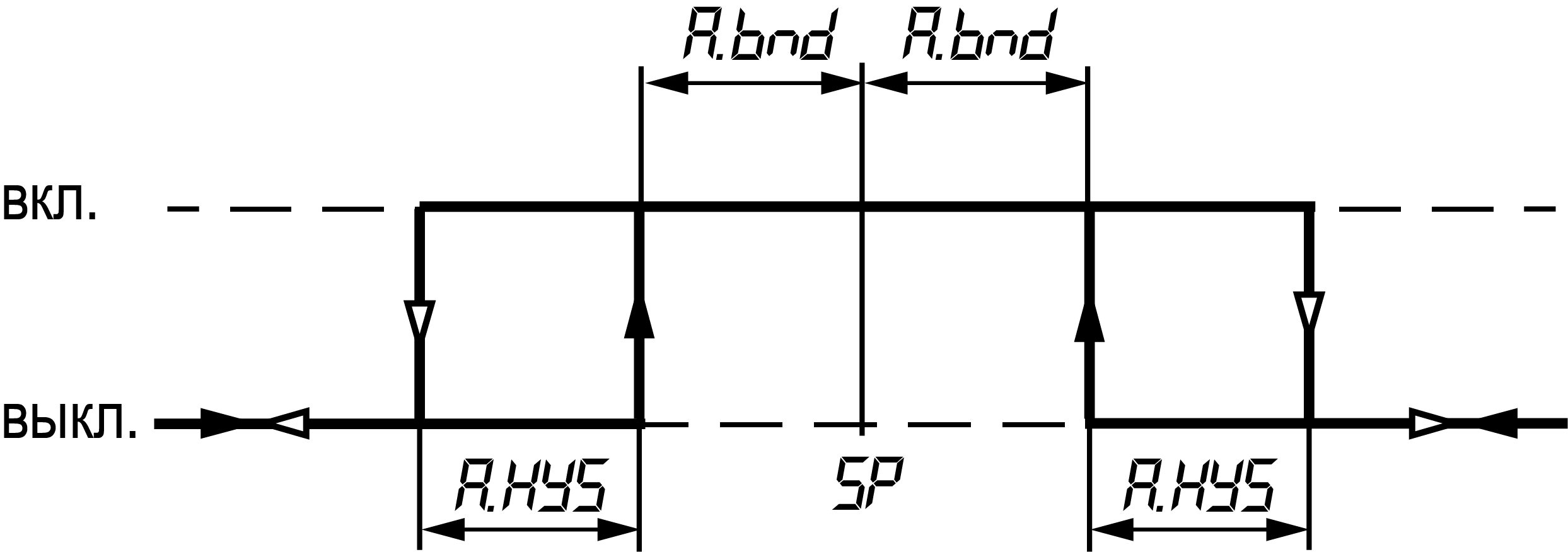
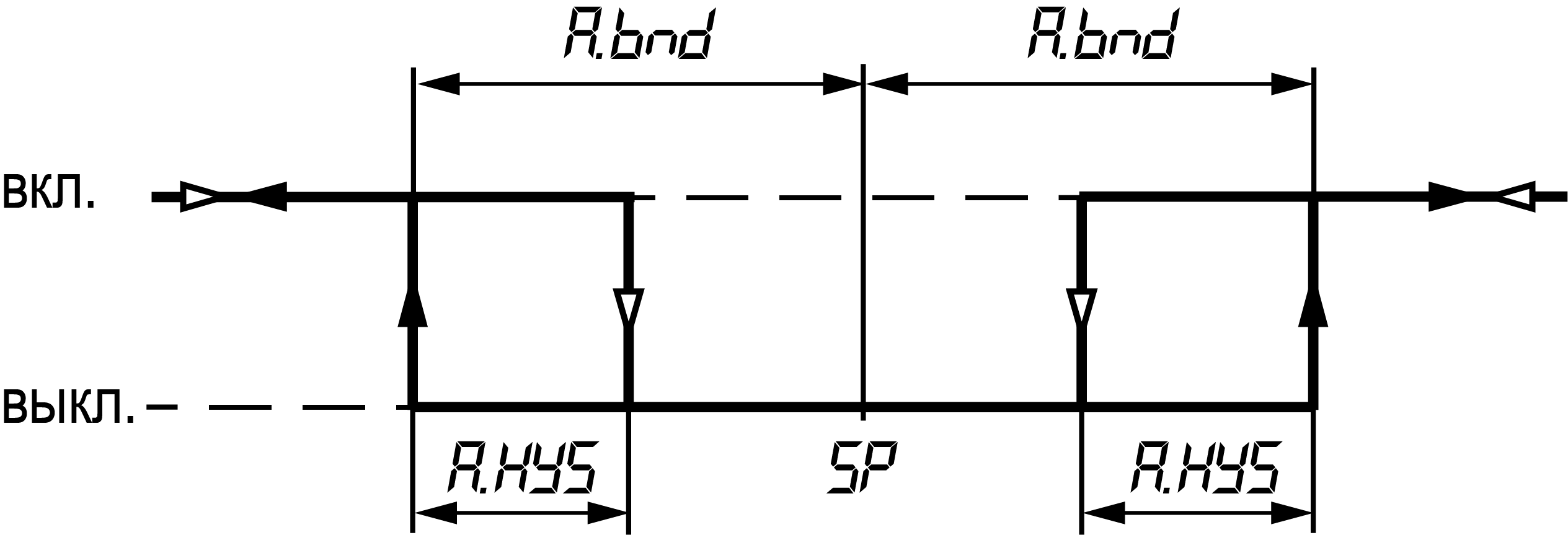
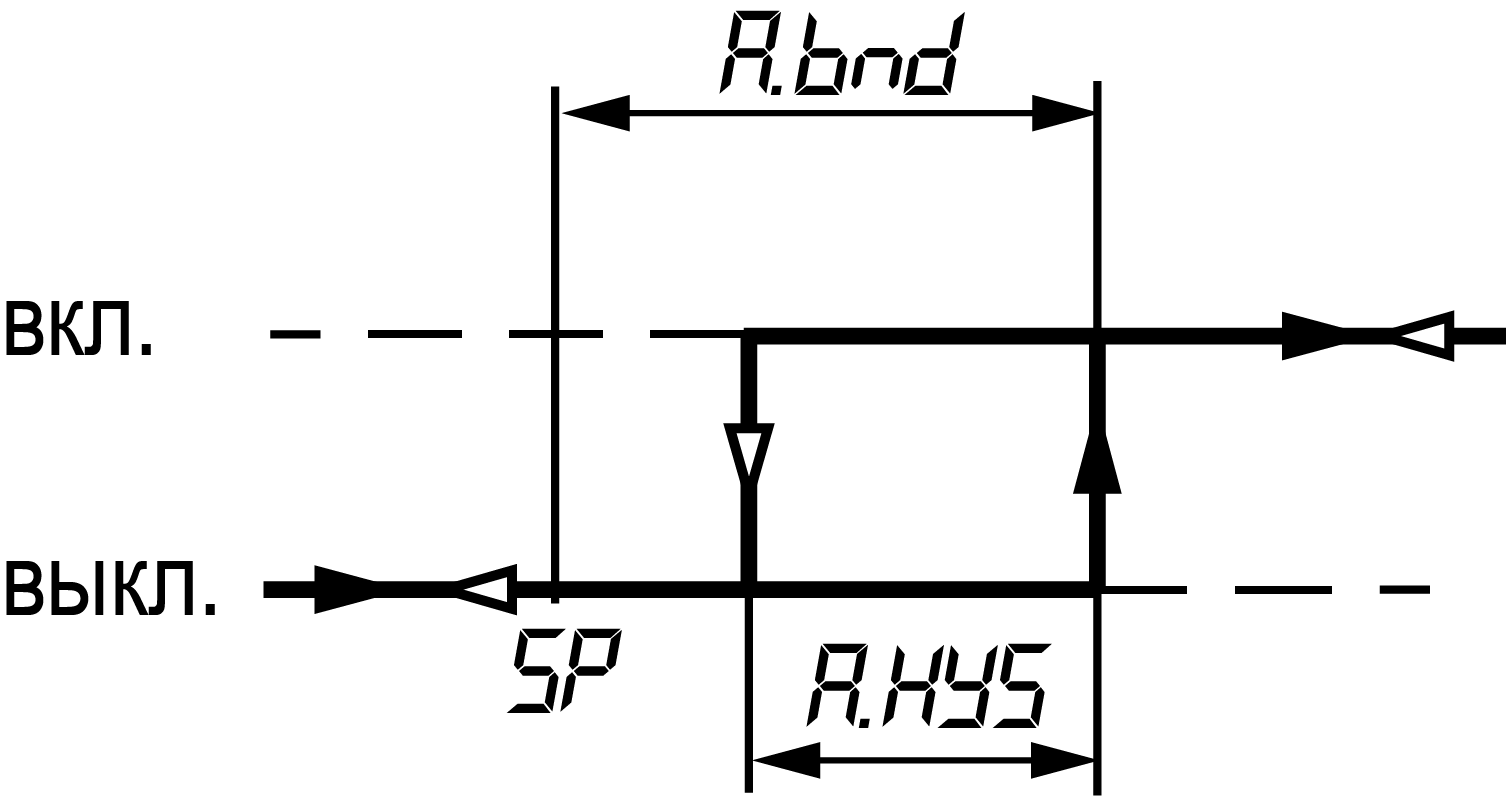
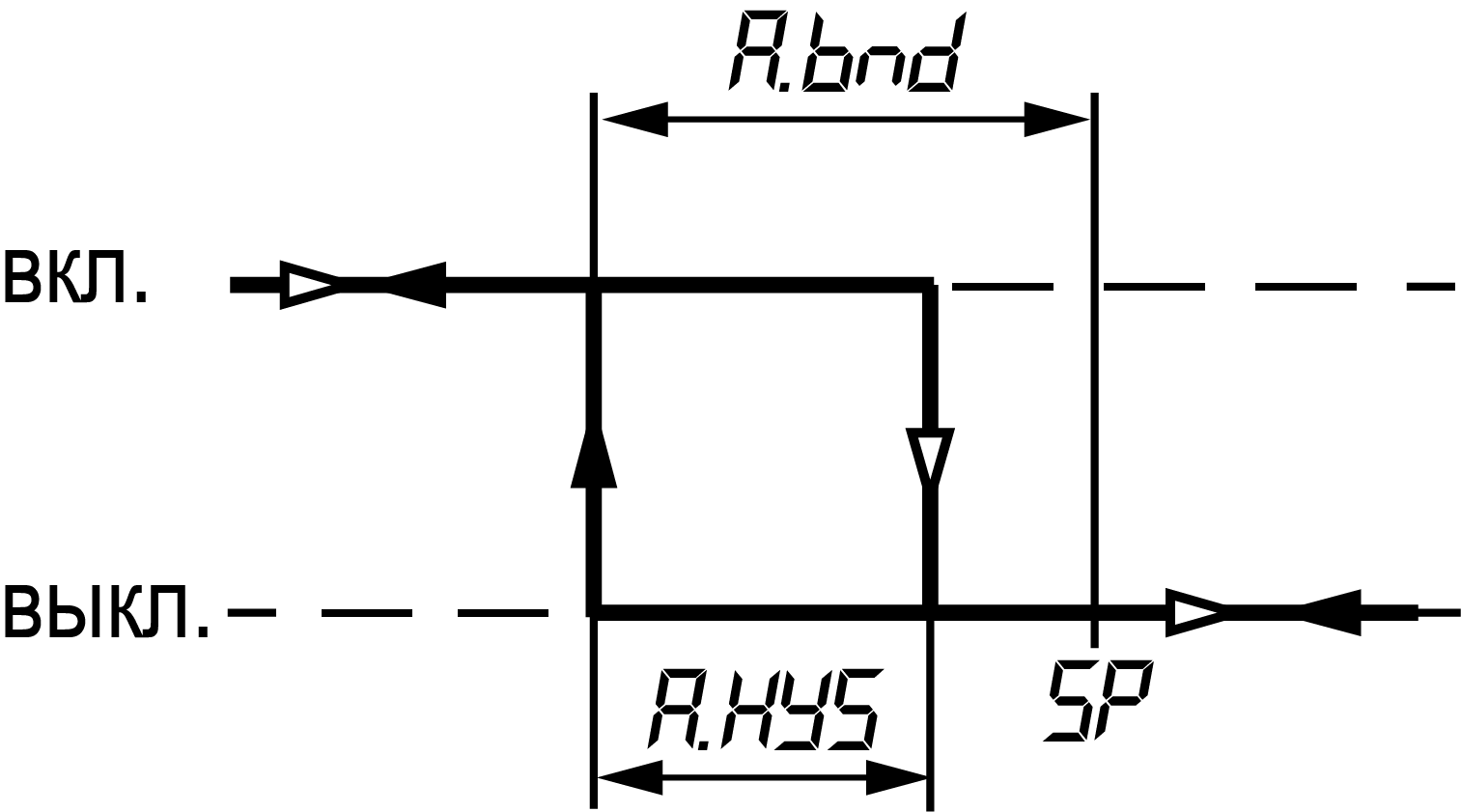
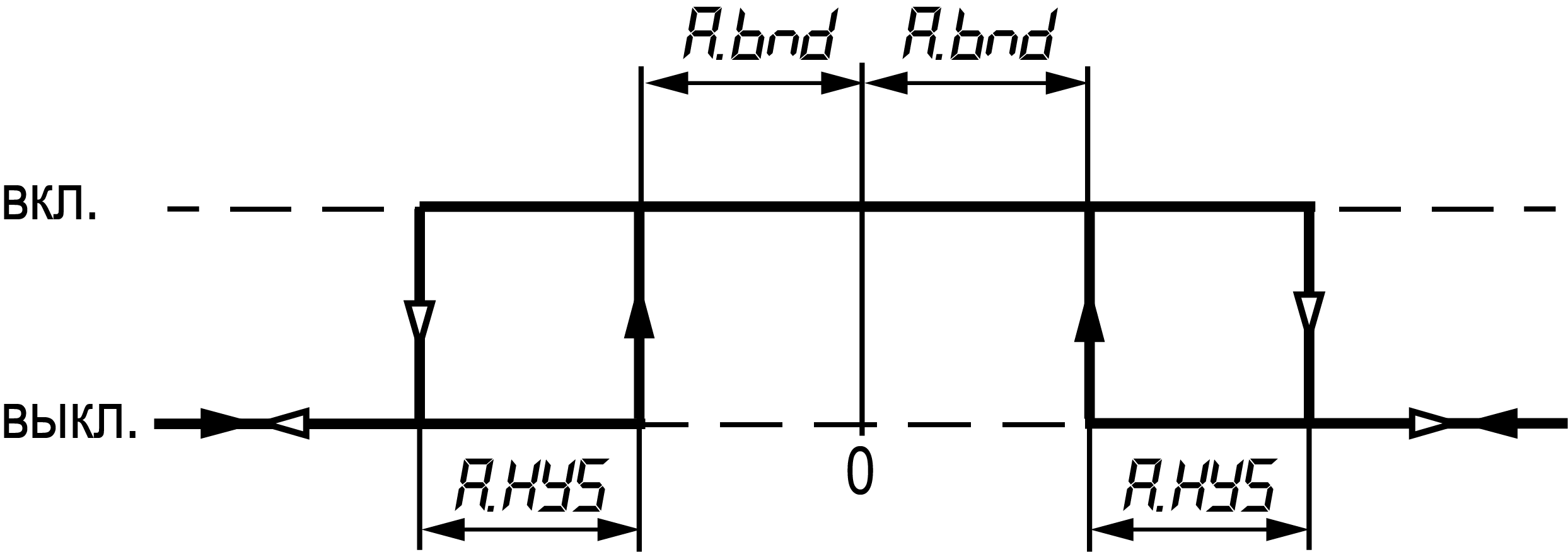
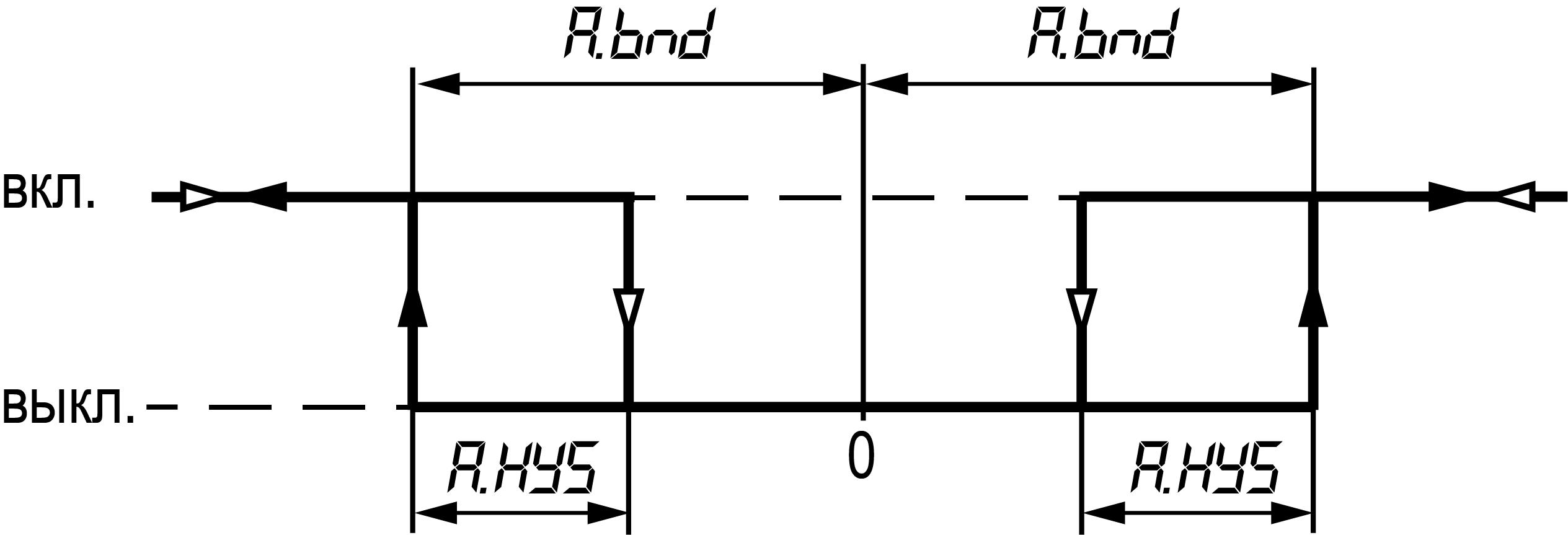
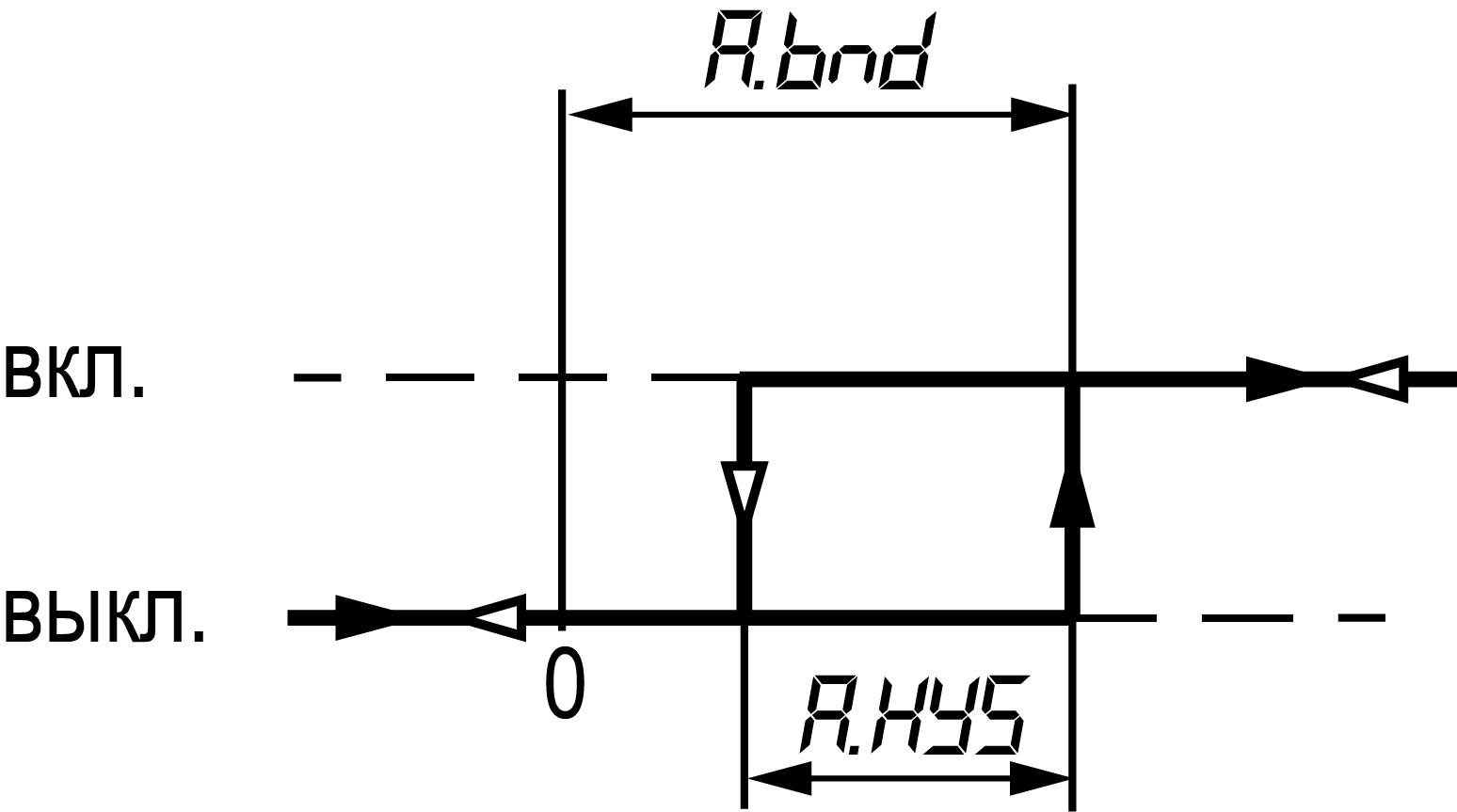
A.tYP | Тип логики срабатывания сигнализатора | 0340 | R/W | UINT16 | oFF | 0 |
SP.П | 1 |
SP.u | 2 |
SP.Hi | 3 |
SP.Lo | 4 |
0.П | 5 |
0.u | 6 |
0.Hi | 7 |
0.Lo | 8 |
A.bnd | Порог срабатывания сигнализатора | 0341 | R/W | FLOAT32 | 0...DeltaSens* |
A.HYS | Гистерезис срабатывания сигнализатора | 0343 | R/W | FLOAT32 | 0...DeltaSens* |
F.bLC | Блокировка первого срабатывания сигнализатора | 0345 | R/W | UINT16 | oN | 0 |
oFF | 1 |
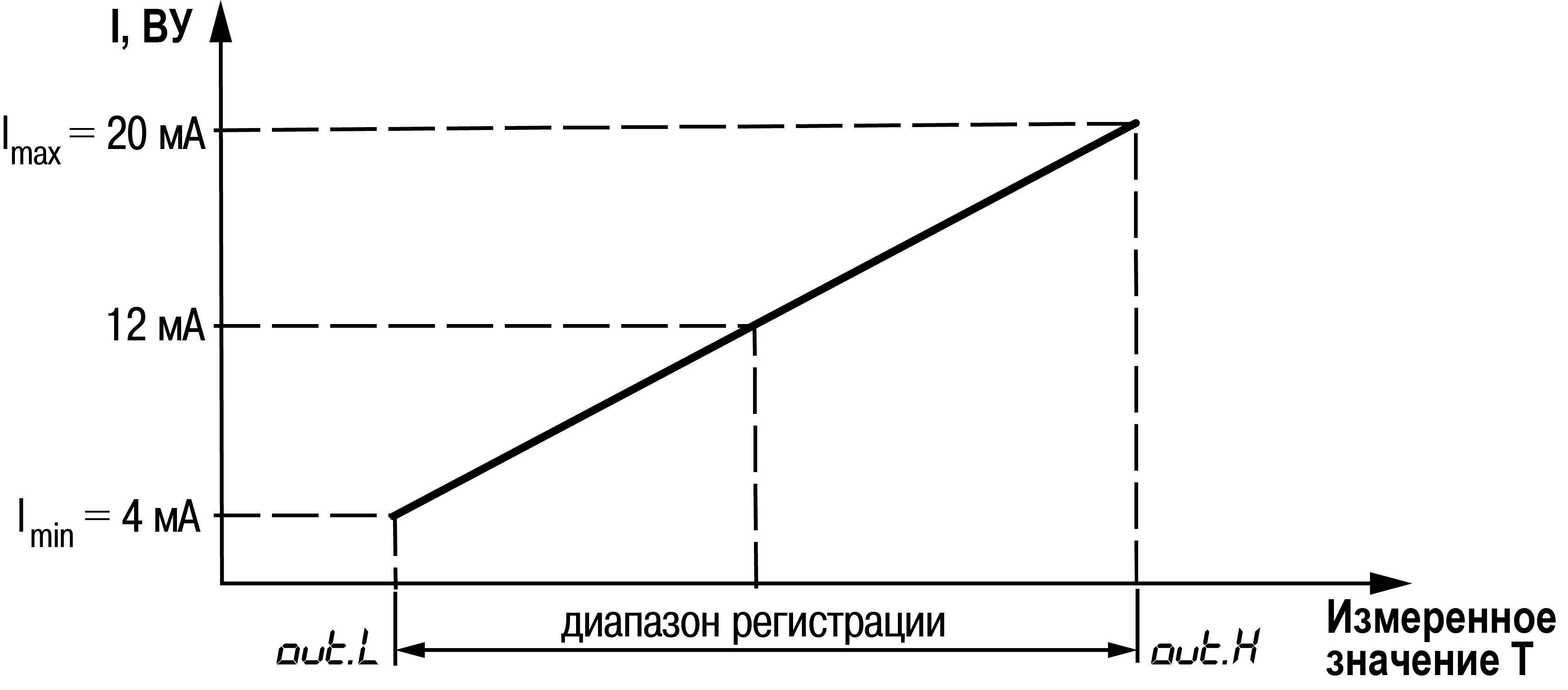
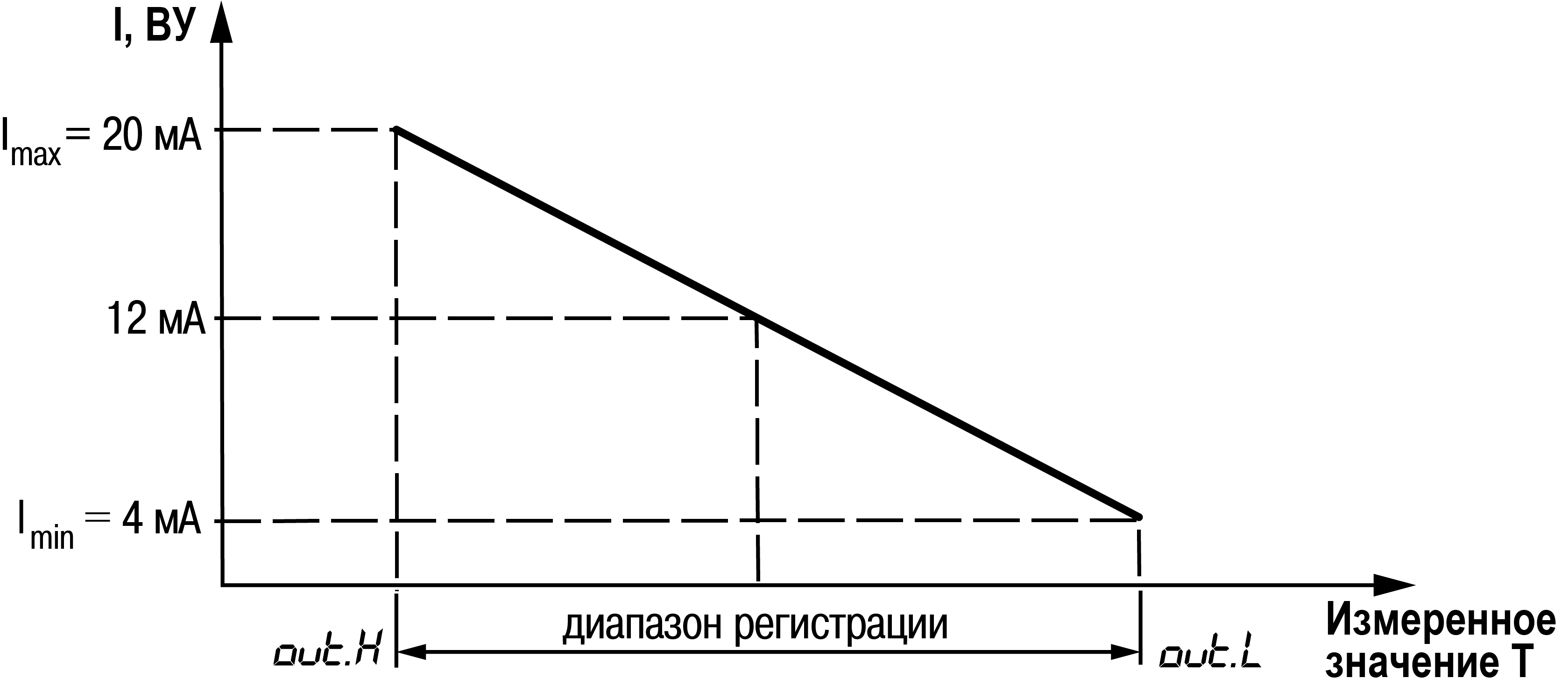
Выход 2 (аналоговый) |
LoG.A | Тип логики работы ЛУ | 0360 | R/W | UINT16 | oFF | 0 |
ConV | 3 |
out.L | Нижняя граница выходного значения
ВУ | 0363 | R/W | FLOAT32 | SensMin...SensMax* |
out.H | Верхняя граница выходного значения
ВУ | 0365 | R/W | FLOAT32 | SensMin...SensMax* |
Err.A | Безопасное состояние выхода в режиме Авария | 0367 | R/W | UINT16 | HI | 0 |
Lo | 1 |
Автонастройка ПИД-регулятора |
Anr | Автонастройка ПИД-регулятора | 02B0 | R/W | UINT16 | oFF | 0 |
run | 1 |
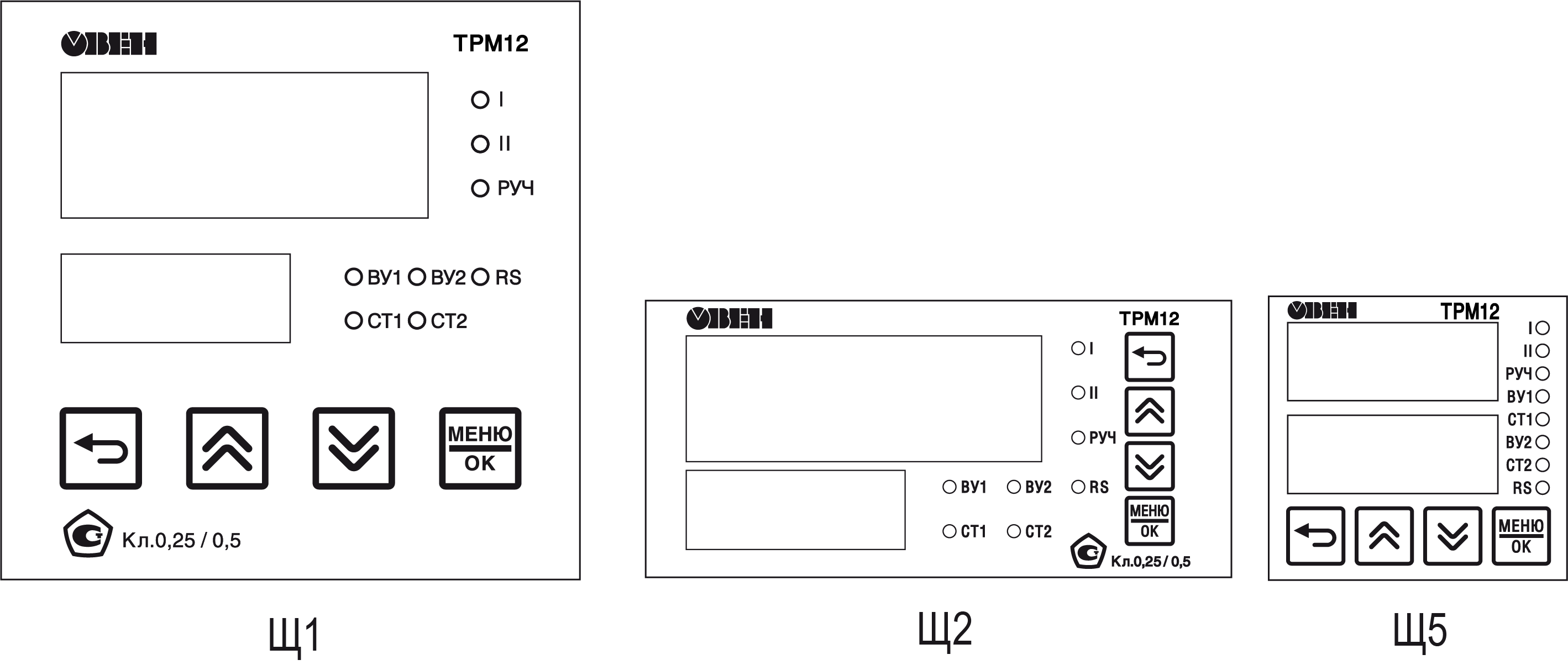
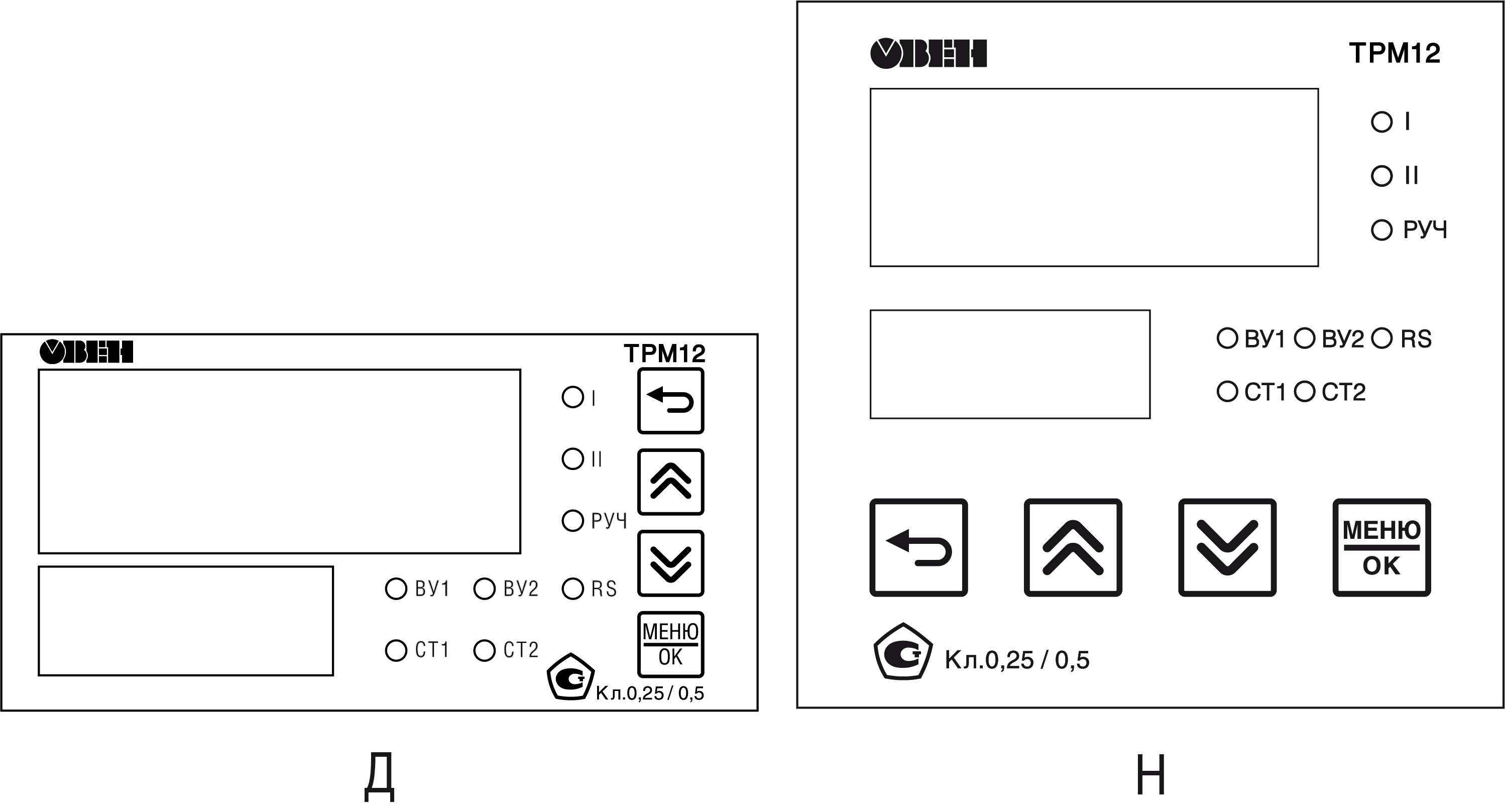
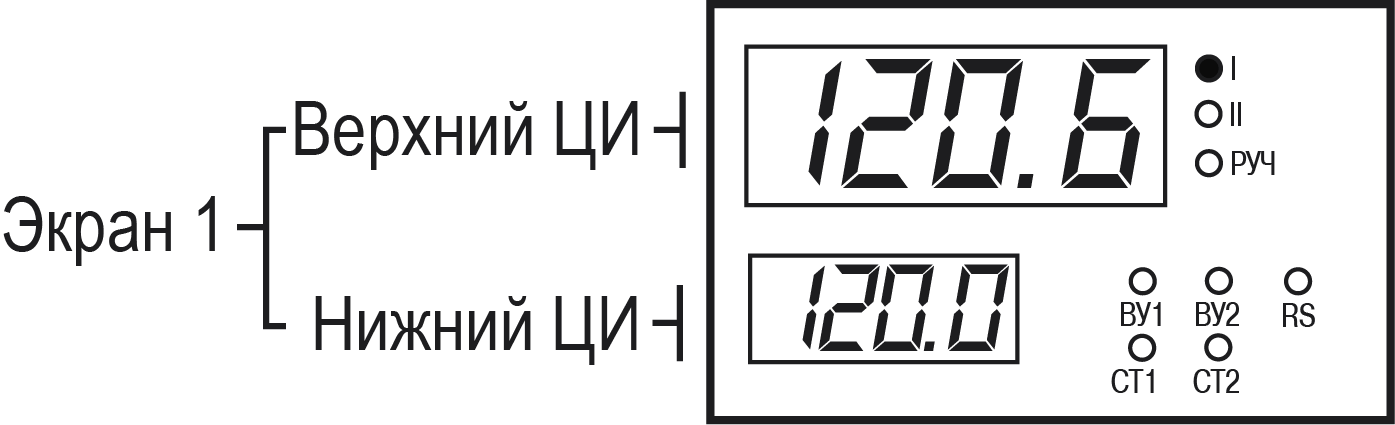
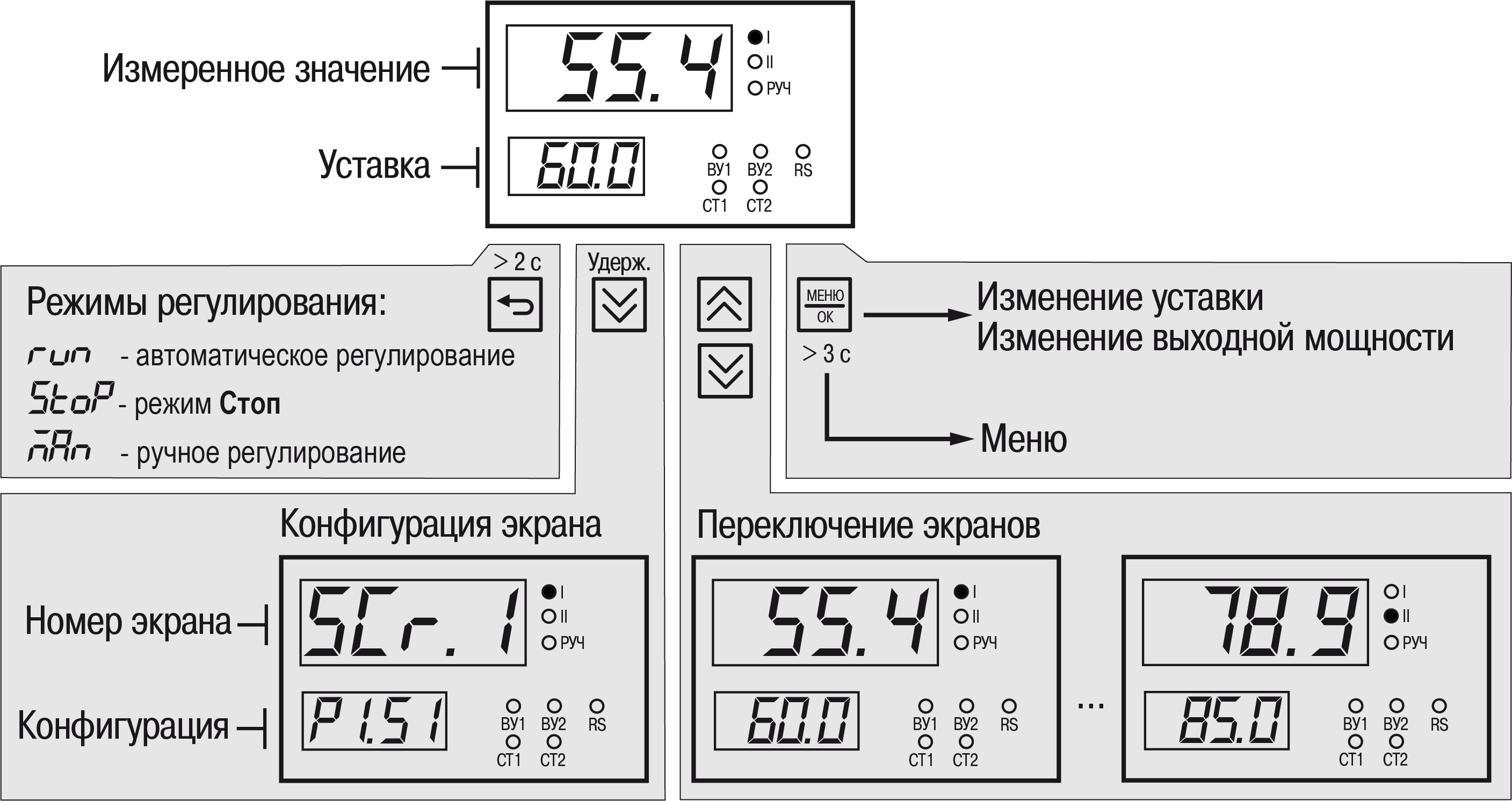
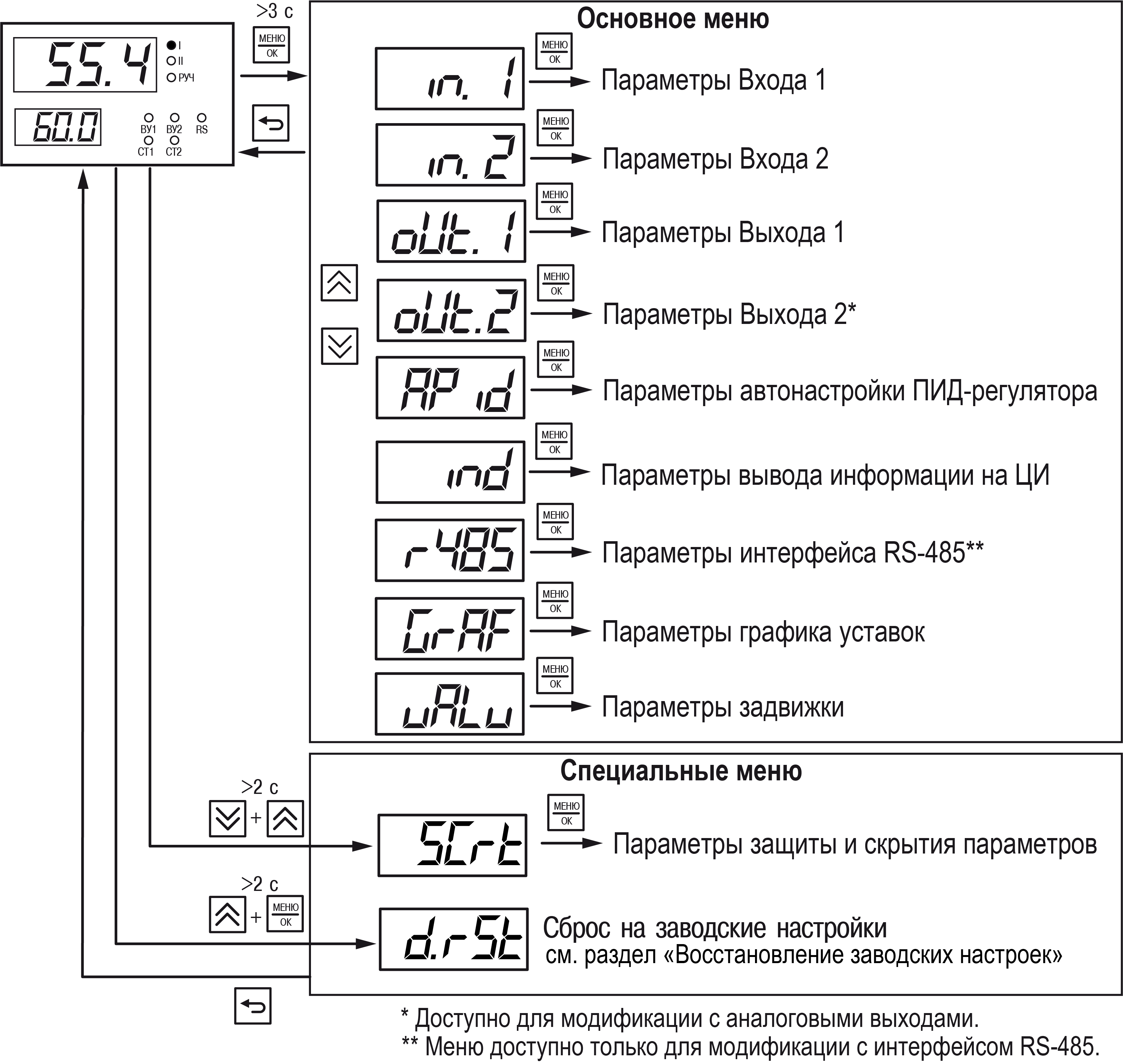
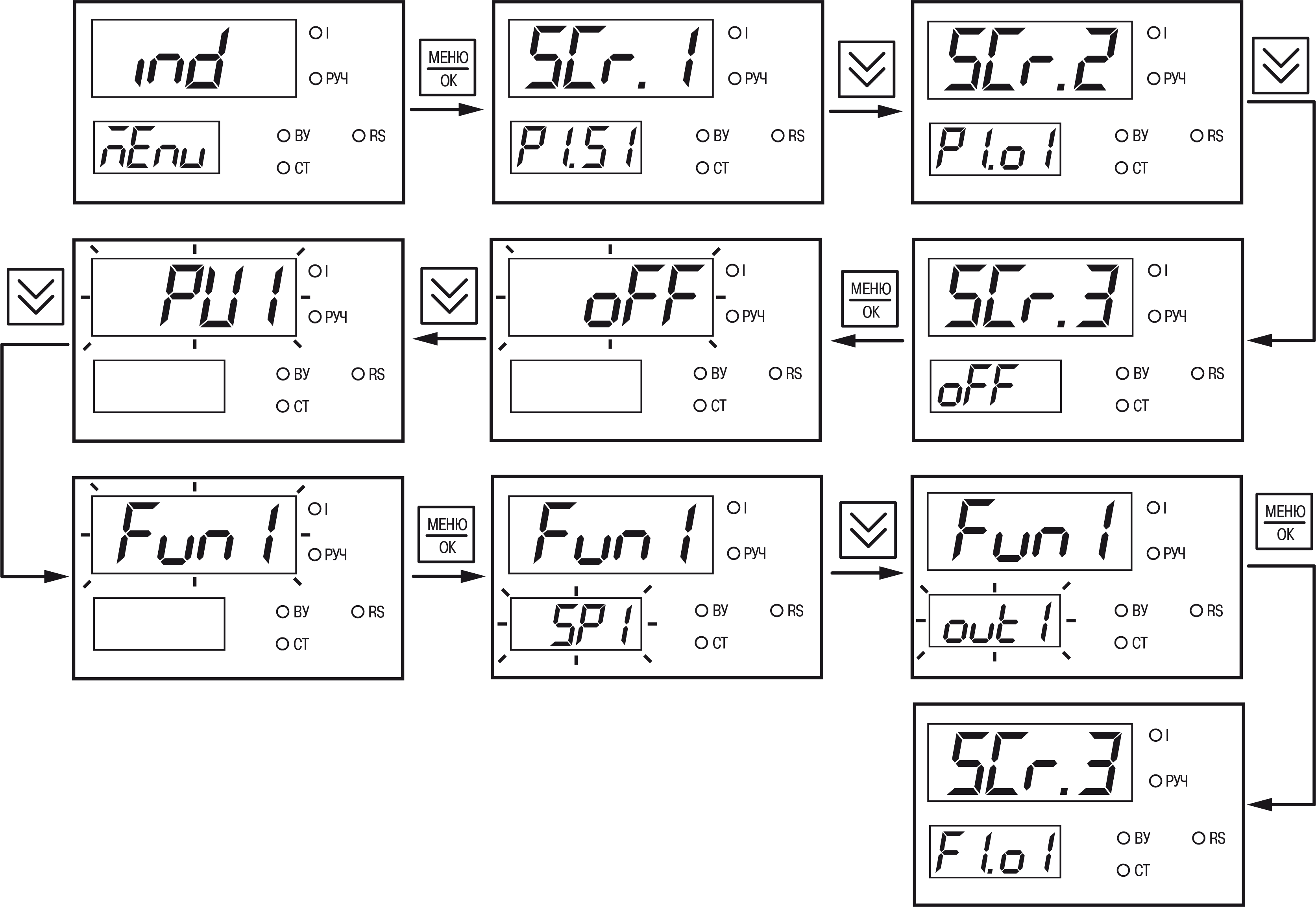
Индикация |
SCr1 | Пользовательский экран 1 | 0400 | R/W | UINT16 | P1S1 | 1 |
P1o1 | 2 |
P1D1 | 3 |
F1S1 | 4 |
F1o1 | 5 |
F1D1 | 6 |
P2D2 | 9 |
F2D2 | 12 |
P1P2 | 13 |
P1F2 | 14 |
F1P2 | 15 |
F1F2 | 16 |
SCr2 | Пользовательский экран 2...6 | 0401 | R/W | UINT16 | oFF P1S1 P1o1 P1D1 F1S1 F1o1 F1D1 P2D2 F2D2 P1P2 P1F2 F1P2 F1F2 | 0 1 2 3 4 5 6 9 12 13 14 15 16 |
|
SCr3 | 0402 | R/W | UINT16 |
|
SCr4 | 0403 | R/W | UINT16 |
|
SCr5 | 0404 | R/W | UINT16 |
|
SCr6 | 0405 | R/W | UINT16 |
out.S | Настройка вывода параметра мощности | 0406 | R/W | UINT16 | PErC | 0 |
dAC | 1 |
rEt.t | Время автоматического возврата из
меню настроек | 0407 | R/W | UINT16 | oFF | 0 |
5 | 1 |
10 | 2 |
30 | 3 |
60 | 4 |
CHG.t | Автоматическая смена экранов отображения
параметров | 0408 | R/W | UINT16 | oFF | 0 |
5 | 1 |
10 | 2 |
30 | 3 |
60 | 4 |
120 | 5 |
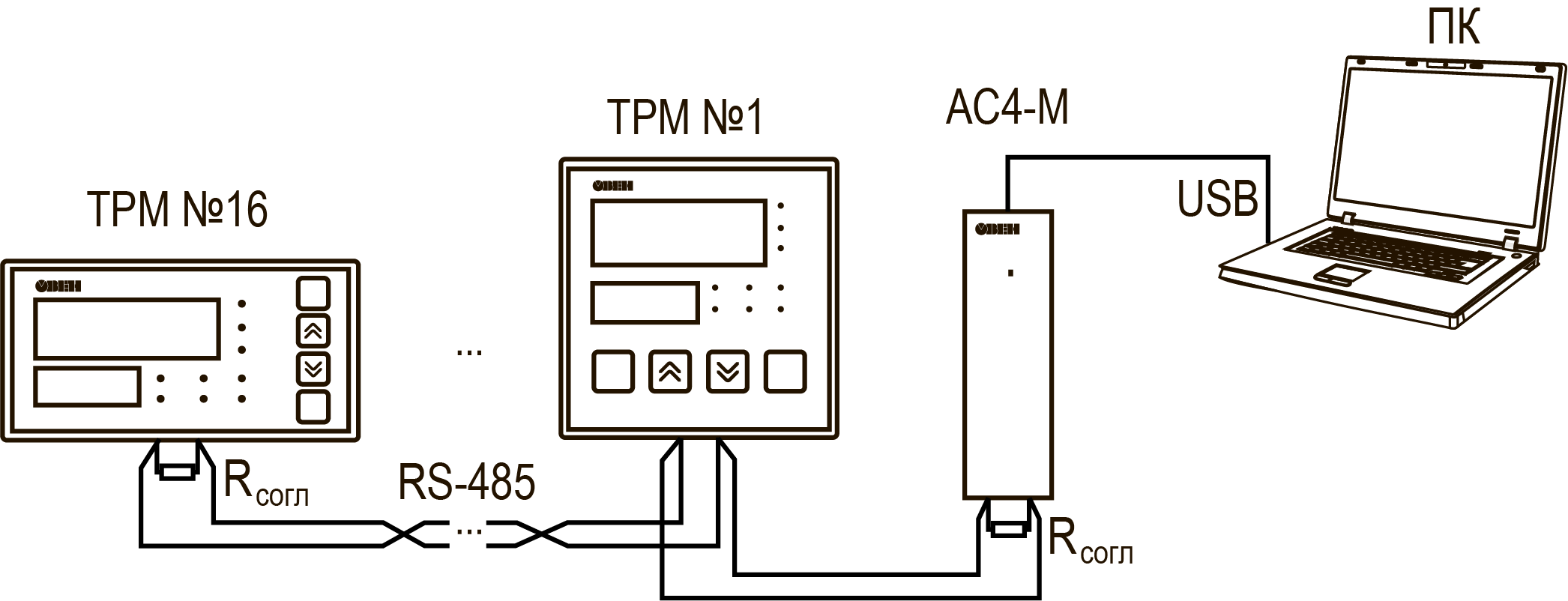
RS-485 |
Prot | Протокол связи | 0500 | R/W | UINT16 | rtu | 0 |
ASCI | 1 |
Addr | Адрес прибора в сети Modbus | 0501 | R/W | UINT16 | 1...247 |
bAud | Скорость обмена данными | 0502 | R/W | UINT16 | 2,4 | 0 |
4,8 | 1 |
9,6 | 2 |
14,4 | 3 |
19,2 | 4 |
28,8 | 5 |
38,4 | 6 |
57,6 | 7 |
115,2 | 8 |
dPS | Формат посылки данных | 0503 | R/W | UINT16 | 8N1 | 0 |
8O1 | 1 |
8E1 | 2 |
8N2 | 3 |
8O2 | 4 |
8E2 | 5 |
| 7o1 | 6 |
|
7E1 | 7 |
|
7O2 | 8 |
7E2 | 9 |
IdLE | Задержка ответа от прибора | 0504 | R/W | UINT16 | 0...20 |
b.ord | Порядок байт в регистре | 0505 | R/W | UINT16 | mSb | 0 |
LSb | 1 |
aPLY | Применение текущих настроек порта
RS-485 | 0506 | R/W | UINT16 | 0 | 0 |
1 | 1 |
| Параметры дискретной задвижки** |
V.Mot | Полное время хода задвижки | 0700 | R/W | UINT16 | 5...999 c |
V.GaP | Время выборки люфта задвижки | 0705 | R/W | FLOAT 32 | 5...10 c |
V.rEV | Минимальное время реверса | 0707 | R/W | FLOAT 32 | 0,5…10,0 c |
Меню скрытых параметров |
PASS | Пароль доступа к меню | 0800 | R/W | UINT16 | 0...9999 |
Prt.E | Защита от редактирования значений
параметров | 0801 | R/W | UINT16 | oFF | 0 |
SETT | 1 |
ALL | 2 |
HidE | 3 |
Atr.E | Включение атрибутов скрытия параметров | 0802 | R/W | UINT16 | oFF | 0 |
on | 1 |
Edit | 2 |
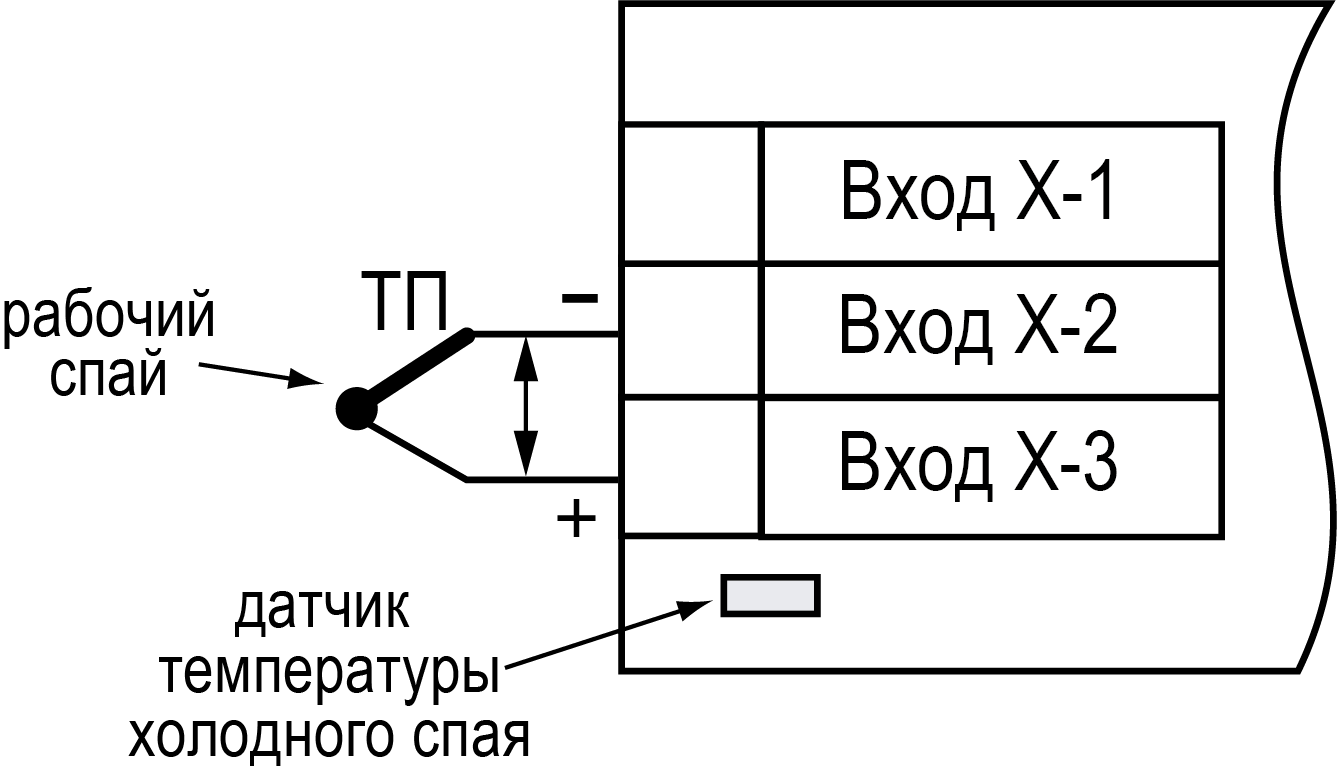
CJS.E | Включение/отключение ДХС | 0803 | R/W | UINT16 | oFF | 0 |
on | 1 |
 Примечание Примечание* SensMin – нижняя граница измерения датчика, SensMax – верхняя
граница измерения датчика, DeltaSens – диапазон измерения датчика. ** Данные регистры доступны только в модификациях с дискретными
ВУ |