| LOG.d | | | Тип логики работы ЛУ |
OFF | H.PID | Регулятор отключен. ВУ в безопасном состоянии |
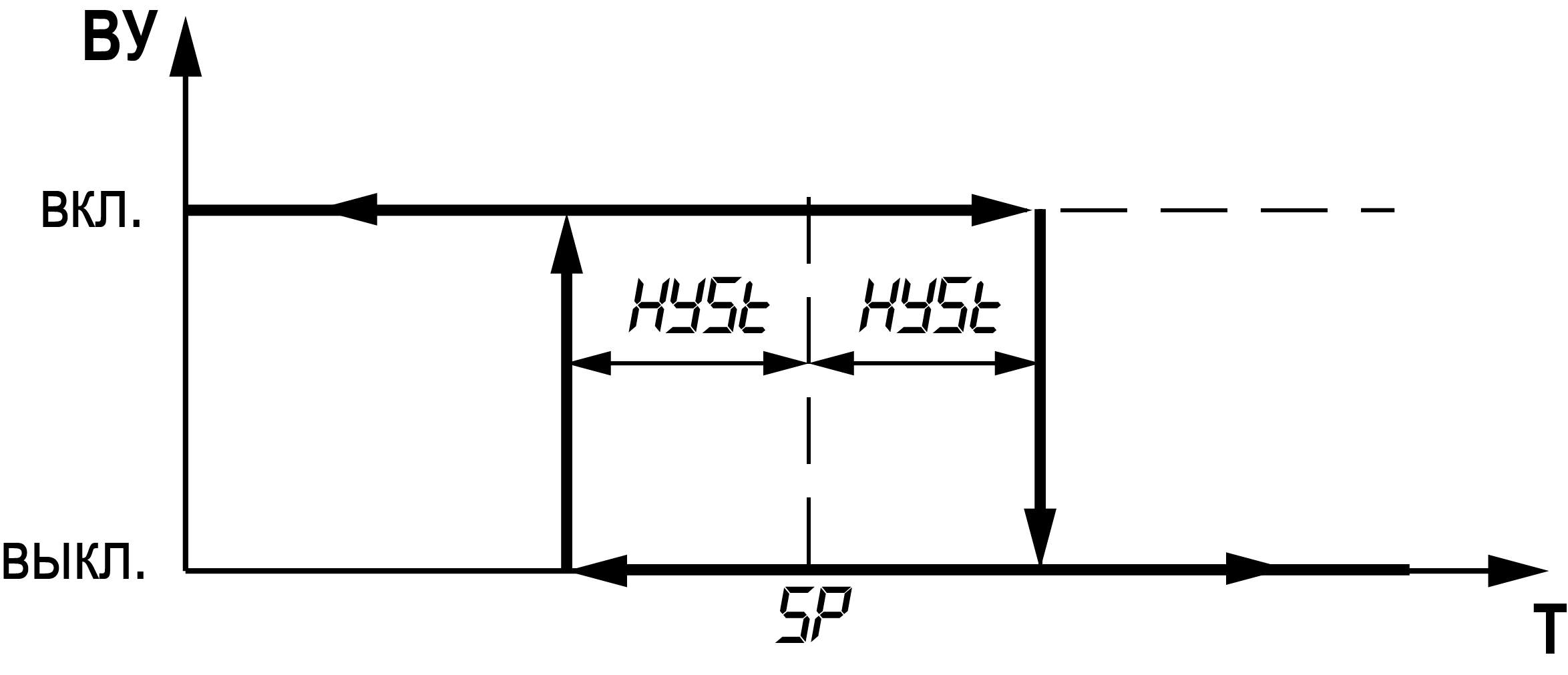
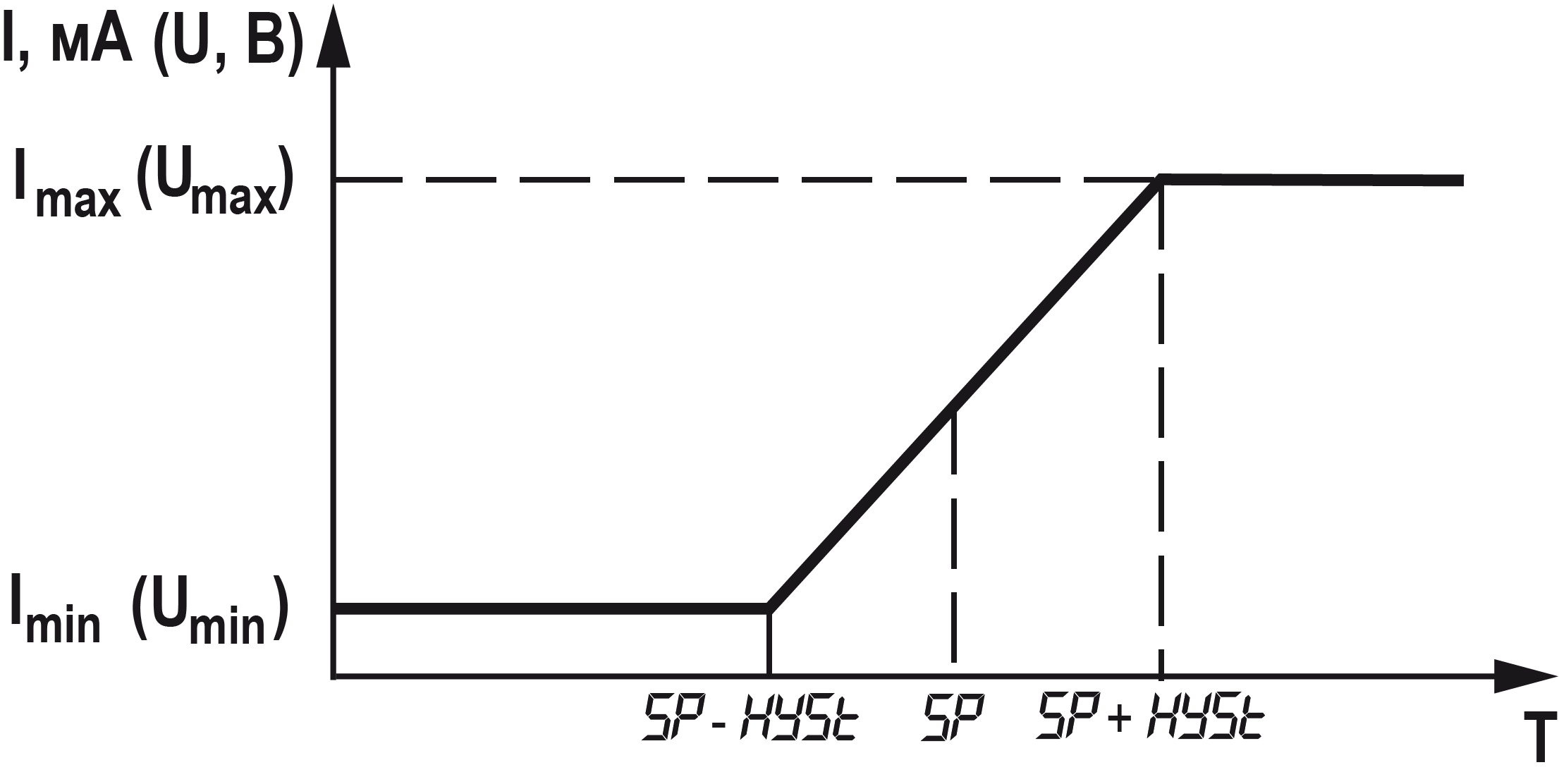
HEAt | On-Off регулятор «нагреватель». Регулятор применяется для управления
работой нагревателя или сигнализации, что значение текущего измерения
T меньше уставки SP. Регулятор срабатывает
по нижнему пределу. Выходное устройство, подключенное к ЛУ, включается
при T < SP – HYSt, выключается
при T > SP + HYSt Двухпозиционное
регулирование происходит по уставке SP с гистерезисом
± HYSt. |
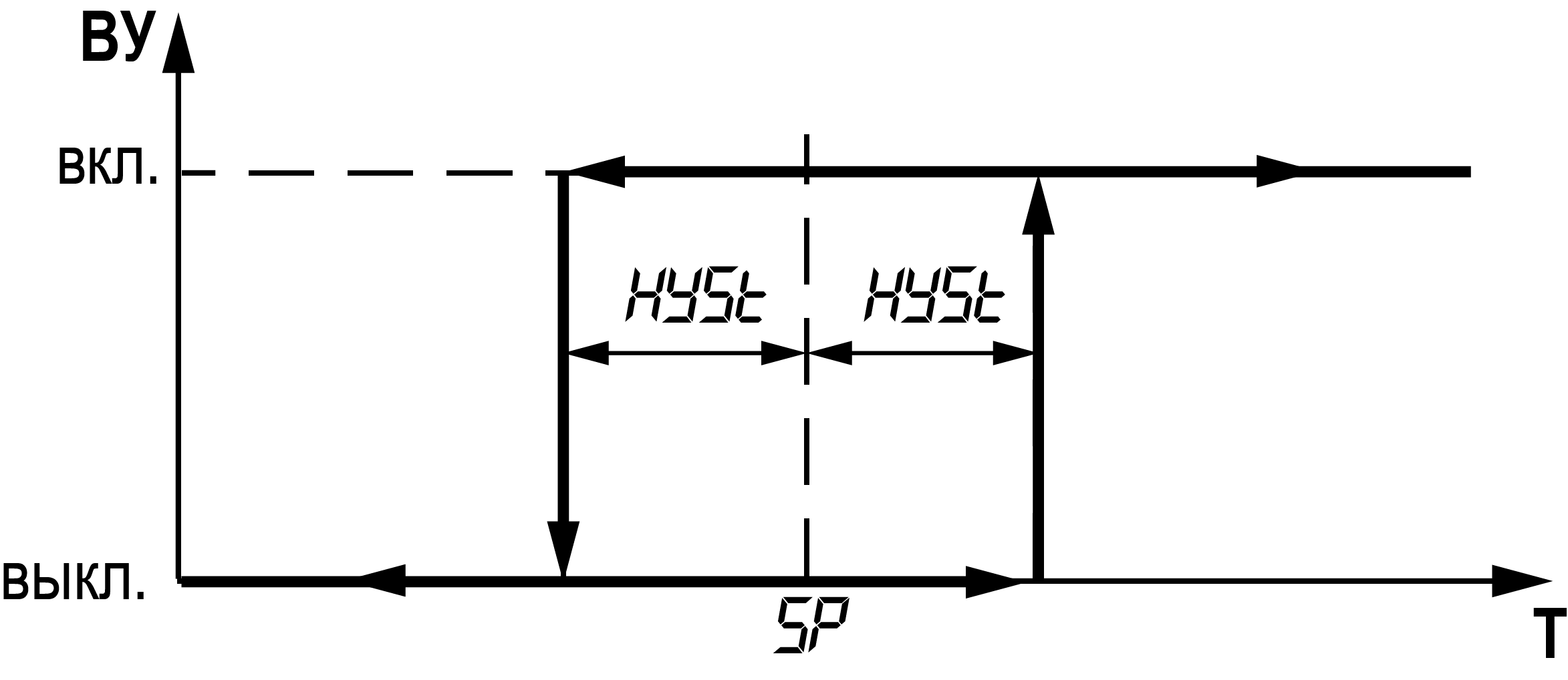
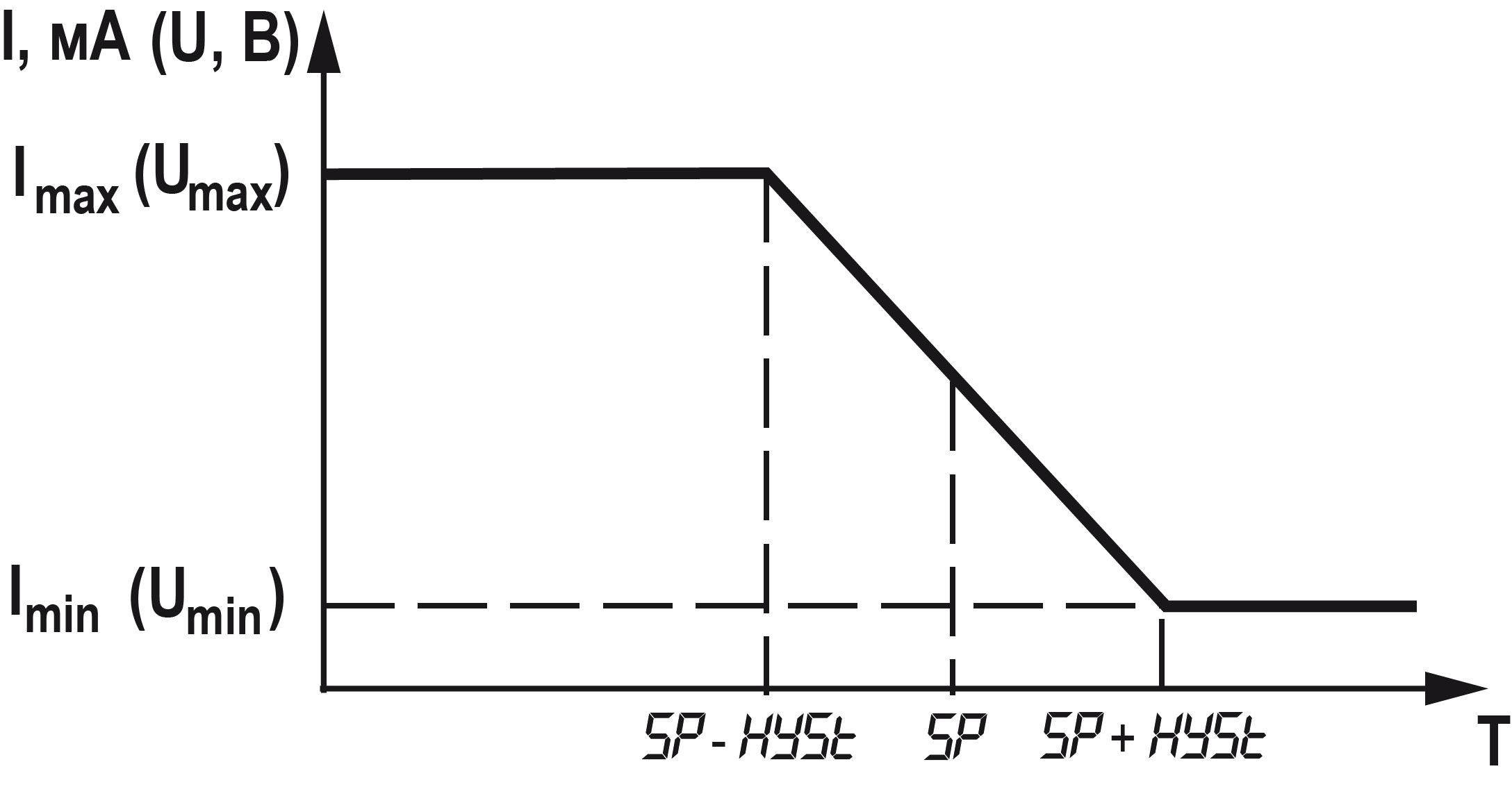
СOOL | On-Off регулятор «холодильник». Регулятор применяется для управления
работой охладителя или сигнализации, что значение текущего измерения
T больше уставки SP. Регулятор срабатывает
по верхнему пределу. ВУ, подключенное к ЛУ, включается при T > SP + HYSt, выключается при T < SP – HYSt |
ALrM | Сигнализатор. Тип логики срабатывания сигнализатора задается
в параметре A.tYP. Сигнализатор продолжает
работать в режиме Стоп и режиме ручного регулирования. Сигнализатор восстанавливается при исчезновении ошибки на
входе. |
H.Pid | ПИД-регулятор «нагреватель» |
C.Pid | ПИД-регулятор «холодильник» |
A.tYP | | SP.U | Тип логики срабатывания сигнализатора Параметр появляется при LOG.d = ALrM. |
OFF | Сигнализатор выключен |
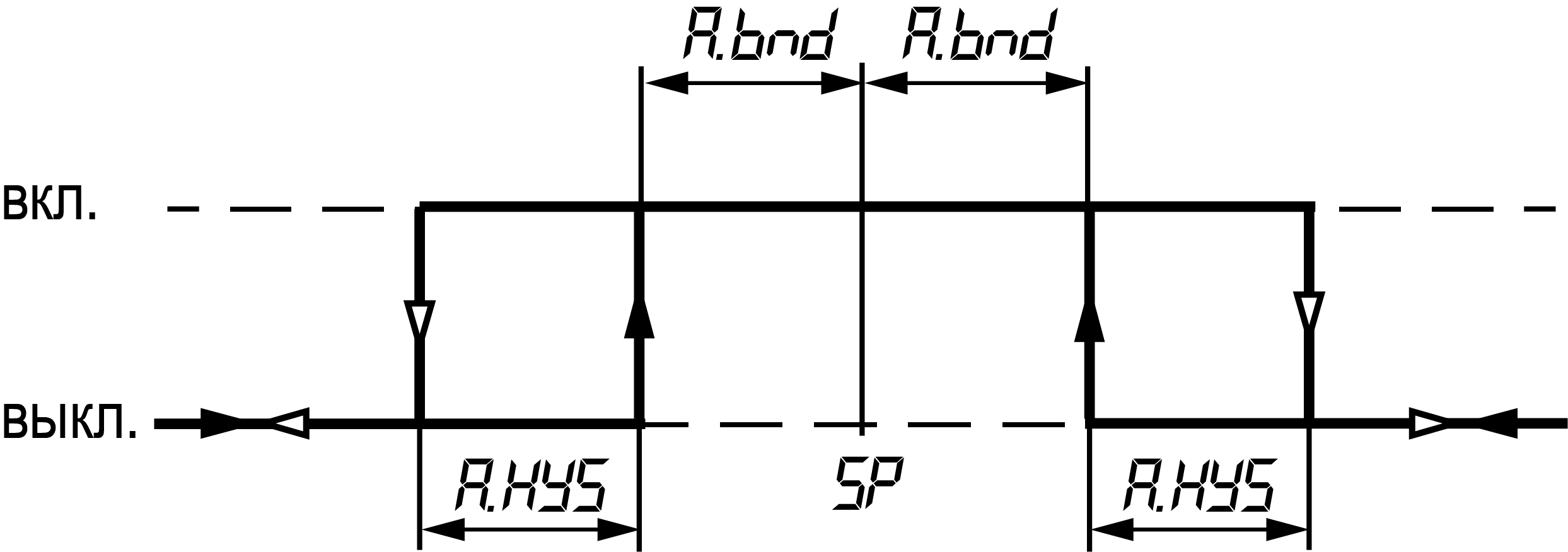
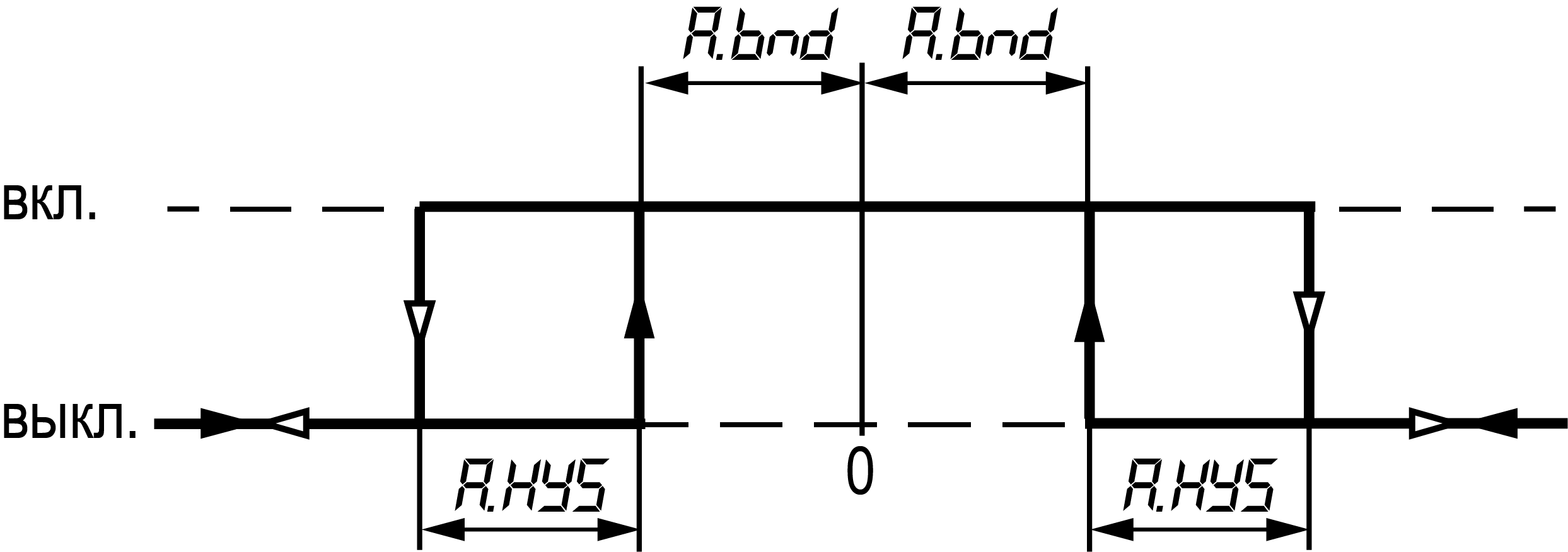
SP.П | Сигнализатор включается, когда измеренное значение находится в диапазоне SP ± A.bnd с учетом параметра A.HYS. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. |
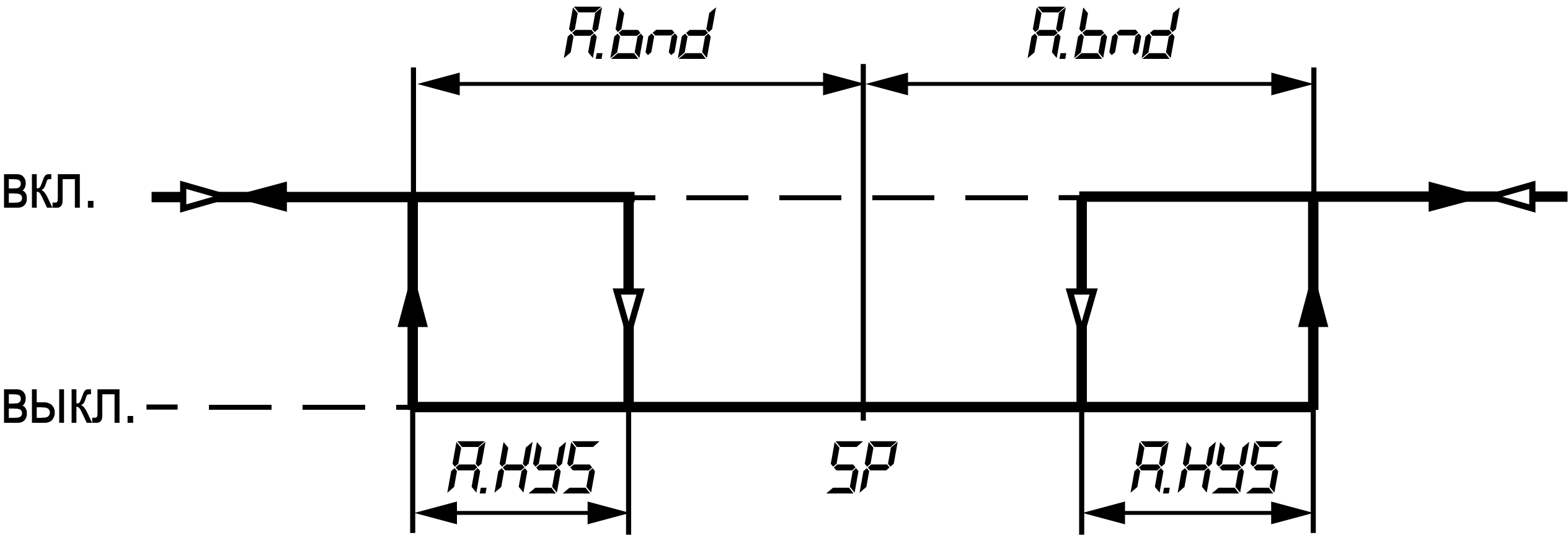
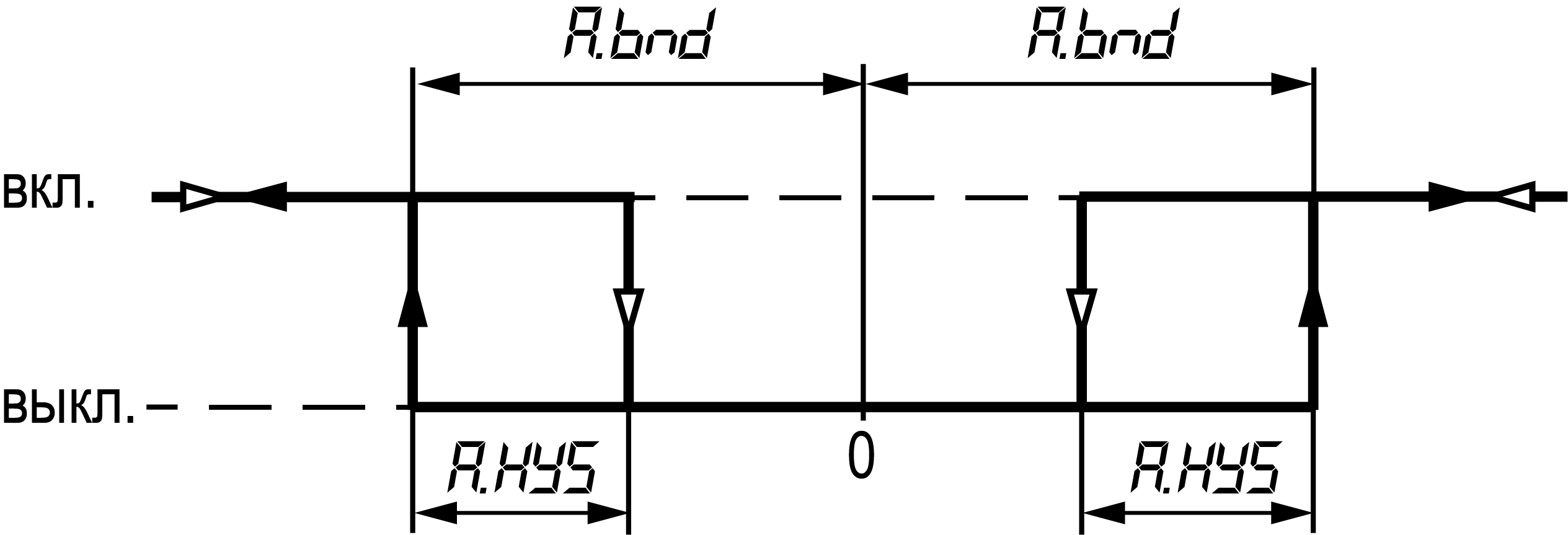
SP.u | Сигнализатор включается, когда измеренное значение находится вне
диапазона SP ± A.bnd с учетом параметра A.HYS. Параметр A.bnd – порог срабатывания
сигнализатора. Параметр A.HYS – гистерезис
срабатывания сигнализатора. |
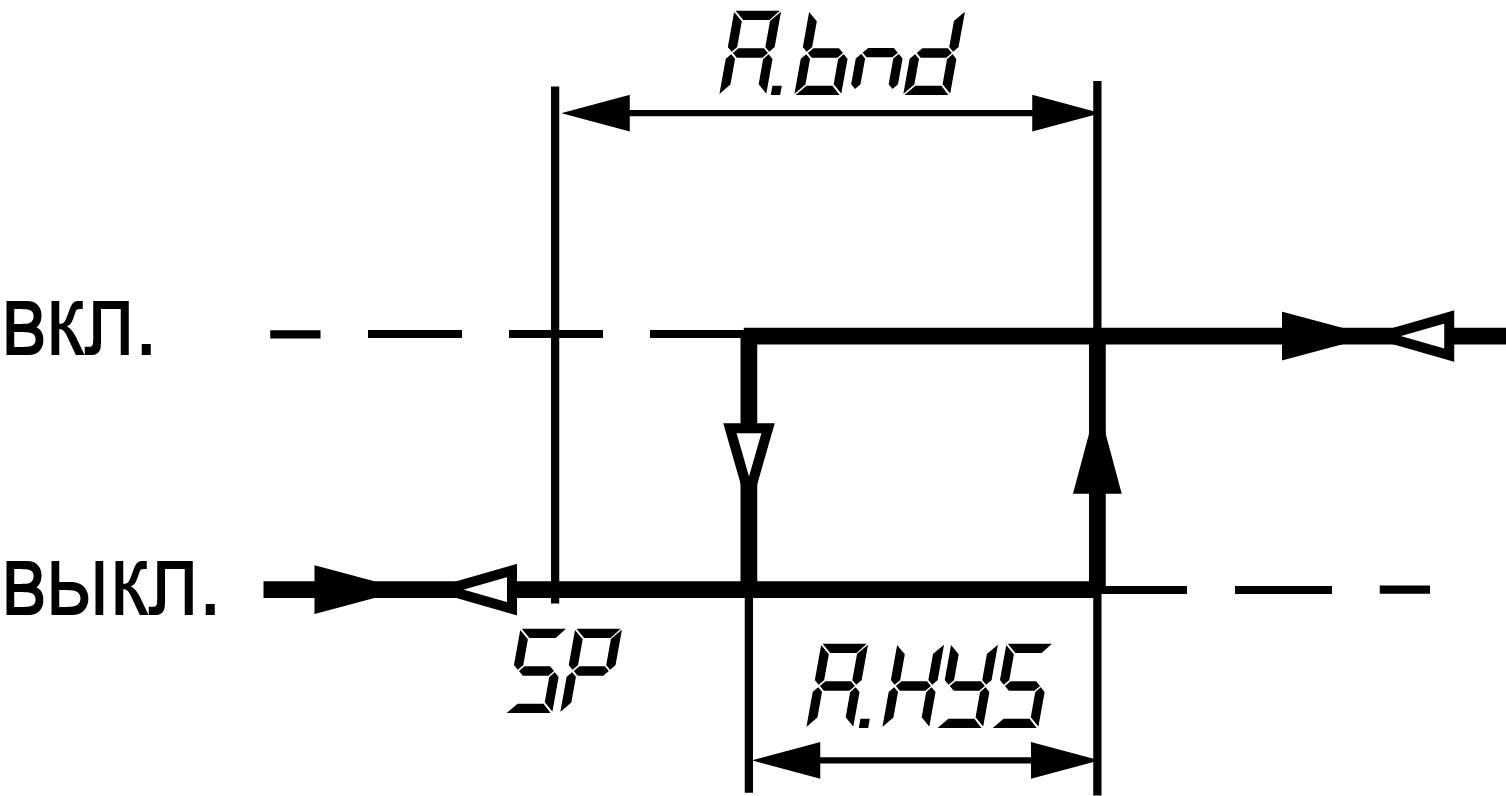
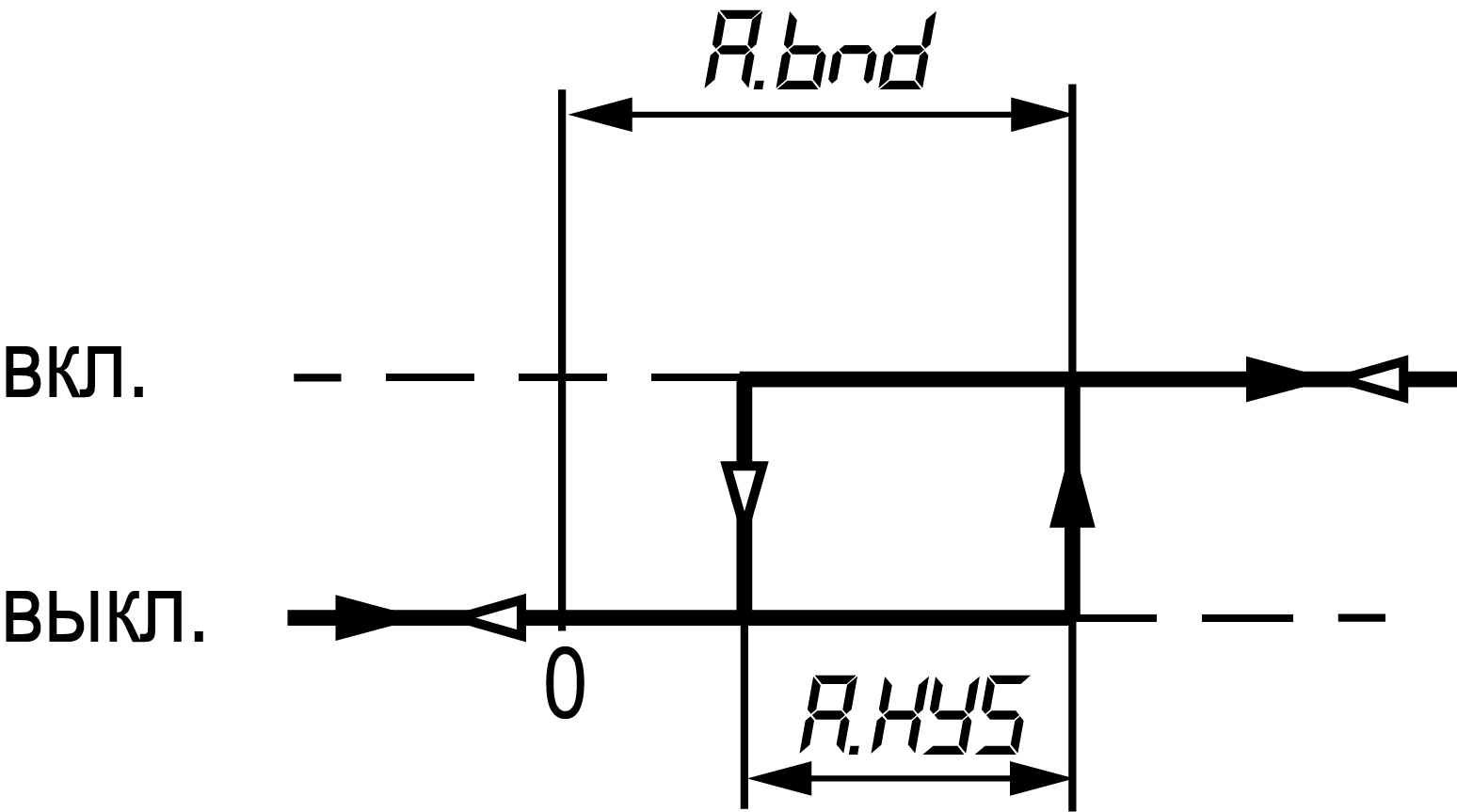
SP.Hi | Сигнализатор включается, когда измеренное значение превышает SP на величину A.bnd. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. |
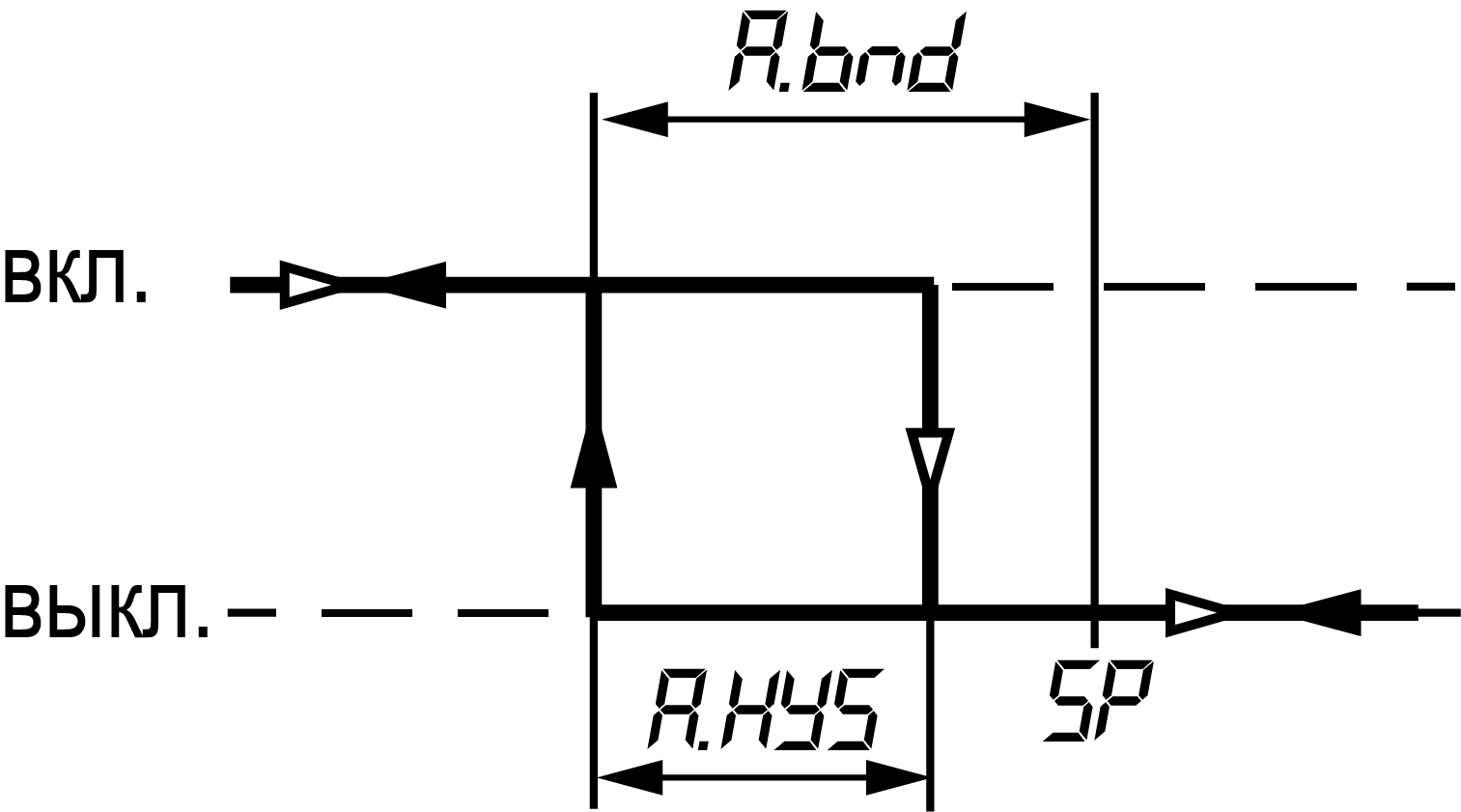
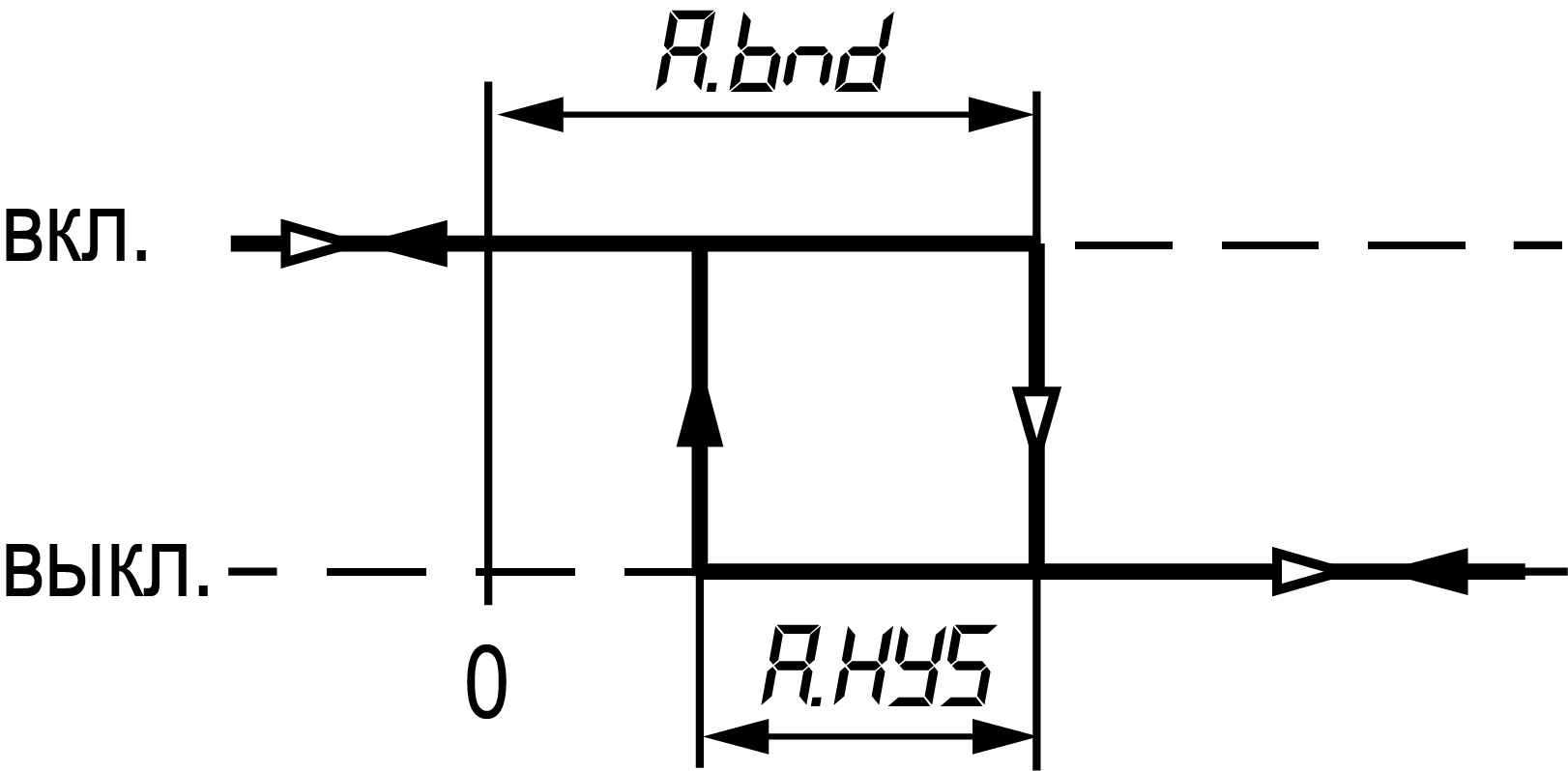
SP.Lo | Сигнализатор включается, когда измеренное значение ниже SP на величину A.bnd. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. |
0.П | Сигнализатор включается, когда измеренное значение находится в диапазоне
0 ± A.bnd с учетом параметра A.HYS. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. |
0.u | Сигнализатор включается, когда измеренное значение находится вне
диапазона 0 ± A.bnd с учетом параметра A.HYS. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. |
0.Hi | Сигнализатор включается, когда измеренное значение превышает ноль
на величину A.bnd. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. |
0.LO | Сигнализатор выключается, когда измеренное значение превышает ноль
на величину A.bnd. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. |
SP* | SP.LO... SP.Hi | 30.0 | Уставка регулятора. Требуемое значение регулируемой величины,
которое должен поддерживать регулятор.  Примечание ПримечаниеПоложение
десятичной точки определяется параметром dPt. |
SP.LO* | SensMin**...SP.Hi | –199.9 | Нижняя и верхняя границы для выбора
диапазона значений параметра уставки (SP). Границы задаются в размерности параметра уставки. При изменении
параметров SP.Lo и SP.Hi их значения
ограничиваются диапазоном измерения текущего датчика на соответствующем
входе Примечание Не меняются при смене типа датчика |
SP.Hi* | SP.LO...SensMax** | 999.9 |
HYSt* | 0..DeltaSens** | 1.0 | Гистерезис. Зона нечувствительности при переключении состояния
выхода. Используется для исключения дребезга ВУ при значениях входа,
близких к уставке. Задается в единицах измерения входа |
Pid.P | 0.001...9999* | 10.0 | Полоса пропорциональности ПИД-регулятора. Значения устанавливаются
в единицах измерения с учетом положения десятичной точки. |
Pid.I | 0..3999 с | 10.0 | Интегральная постоянная ПИД-регулятора. Если установлено значение
0, то в регуляторе отключается действие интегральной составляющей. |
Pid.d | 0..3999 с | 10.0 | Дифференциальная постоянная ПИД-регулятора |
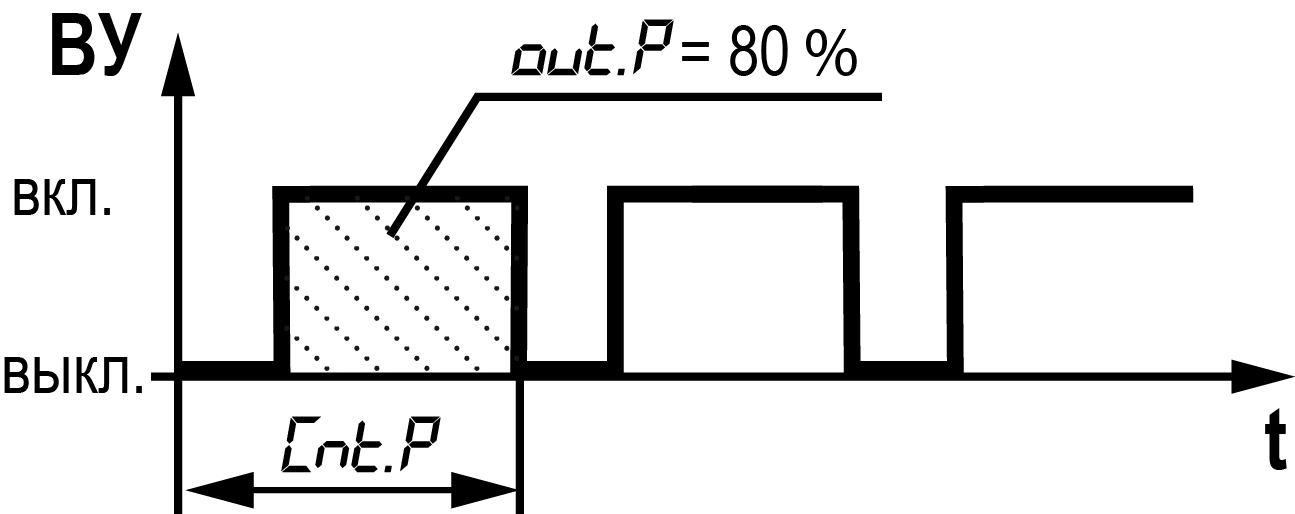
Cnt.P | 1...250 с | 5 | Период следования импульсов. Примечание Минимальная возможная длительность импульса — 50
мс. |
VSP* | OFF...DeltaSens** | OFF | Скорость изменения уставки ПИД-регулятора. Скорость изменения
уставки используется для сглаживания перехода с текущего значения
уставки на заданное. При изменении уставки ПИД-регулятор должен
использовать уставку по формуле: SPтекущ = SPпред + vSP в течение
минуты. Где SPтекущ – текущее значение
уставки, SPпред – предыдущее значение
уставки. Увеличение (уменьшение) уставки происходит до тех пор,
пока SPтекущ не станет равной SP При включении прибора или переходе из режима Стоп или ручного регулирования в режим автоматического
регулирования в качестве начального значения SPпред используется текущее значение на входе 1. Значение OFF – нет ограничения по скорости |
db.d | 0.02...9.99 с | 0.02 | Минимальная
длительность ШИМ Выходной сигнал подается на исполнительный
механизм тогда, когда рассчитанная длительность импульса включения(выключения)
больше или равна db.d. Не выданные воздействия накапливаются
до достижения db.d. Параметр относится как
ко времени включения, так и ко времени выключения ВУ. Примечание В режиме ручного регулирования нельзя выдать управляющее
воздействие меньше, чем db.d. Значение db.d должно быть меньше, чем 50% Cnt.P |
d.bnd* | 0...DeltaSens** | 0 | Зона нечувствительности ПИД-регулятора. Значения задаются в
единицах измерения с учетом положения десятичной точки. Если
измеренный сигнал находится внутри диапазона SP ± d.bnd, то ПИД-регулятор не будет изменять выходную мощность
до тех пор, пока регулируемая величина не выйдет из этой зоны |
OL.L | 0...100.0 | 0.0 | Минимальная выходная мощность (нижний предел) ПИД-регулятора. Значения в % от 0 до oL.H. |
OL.H | 0...100.0 | 100.0 | Максимальная выходная мощность (верхний предел) ПИД-регулятора. Значения в % от oL.L до 100. |
OL.V | 0.2..100 %/c | 100.0 | Максимальная скорость изменения выходной мощности ПИД-регулятора. На данную величину может изменяться значение Out.P за 1 секунду. |
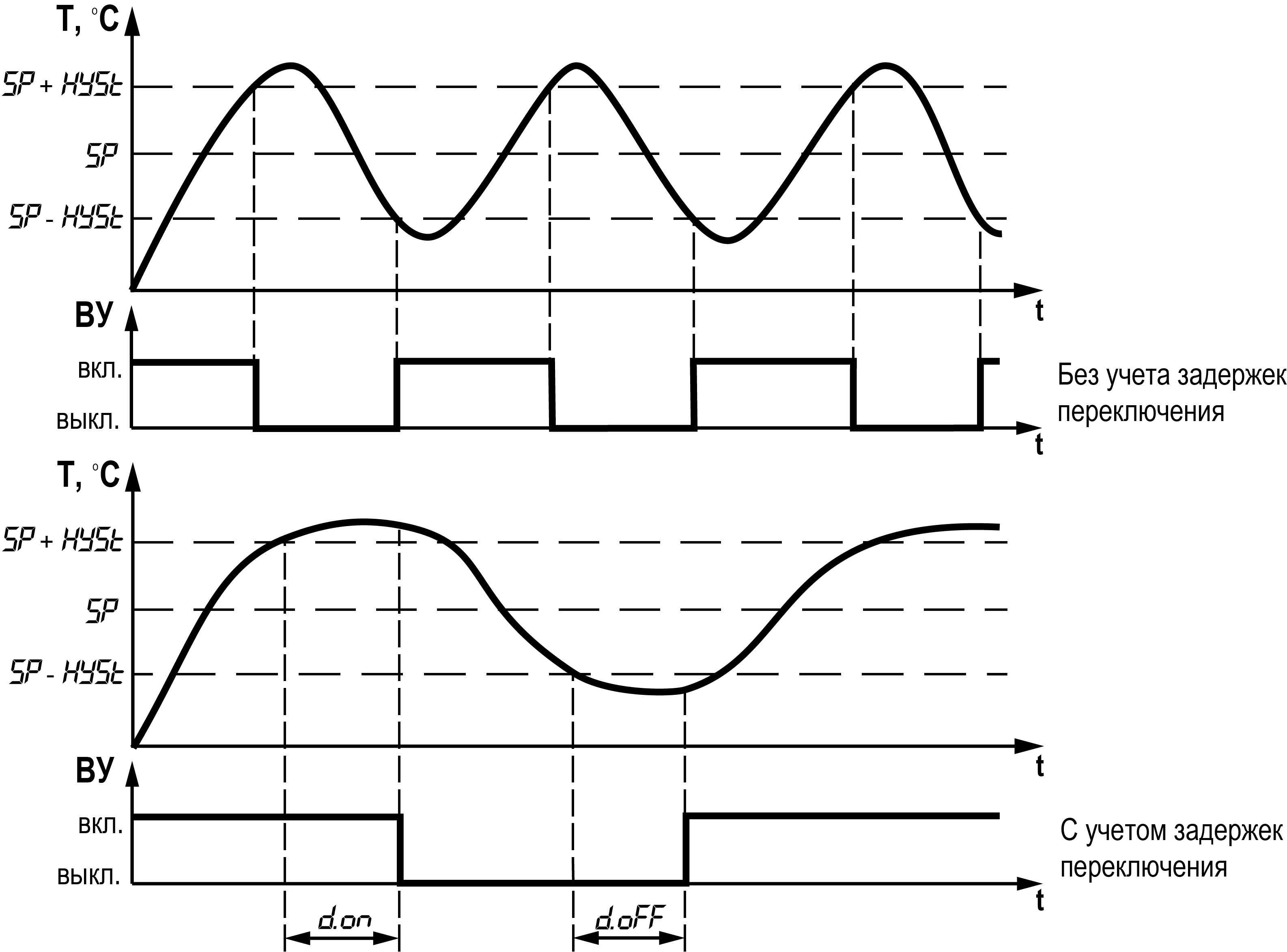
d.On | 0...250 с | 0 | d.On – задержка включения
регулятора. Время, которое проходит после срабатывания условия регулятора
до замыкания ВУ. Если за данное время условие включения регулятора
сбрасывается, то отсчет обнуляется. d.OFF –
задержка выключения регулятора. Время, которое проходит после срабатывания
условия регулятора до размыкания ВУ. Если за данное время условие
выключения регулятора сбрасывается, то отсчет обнуляется. |
d.OFF | 0...250 c | 0 |
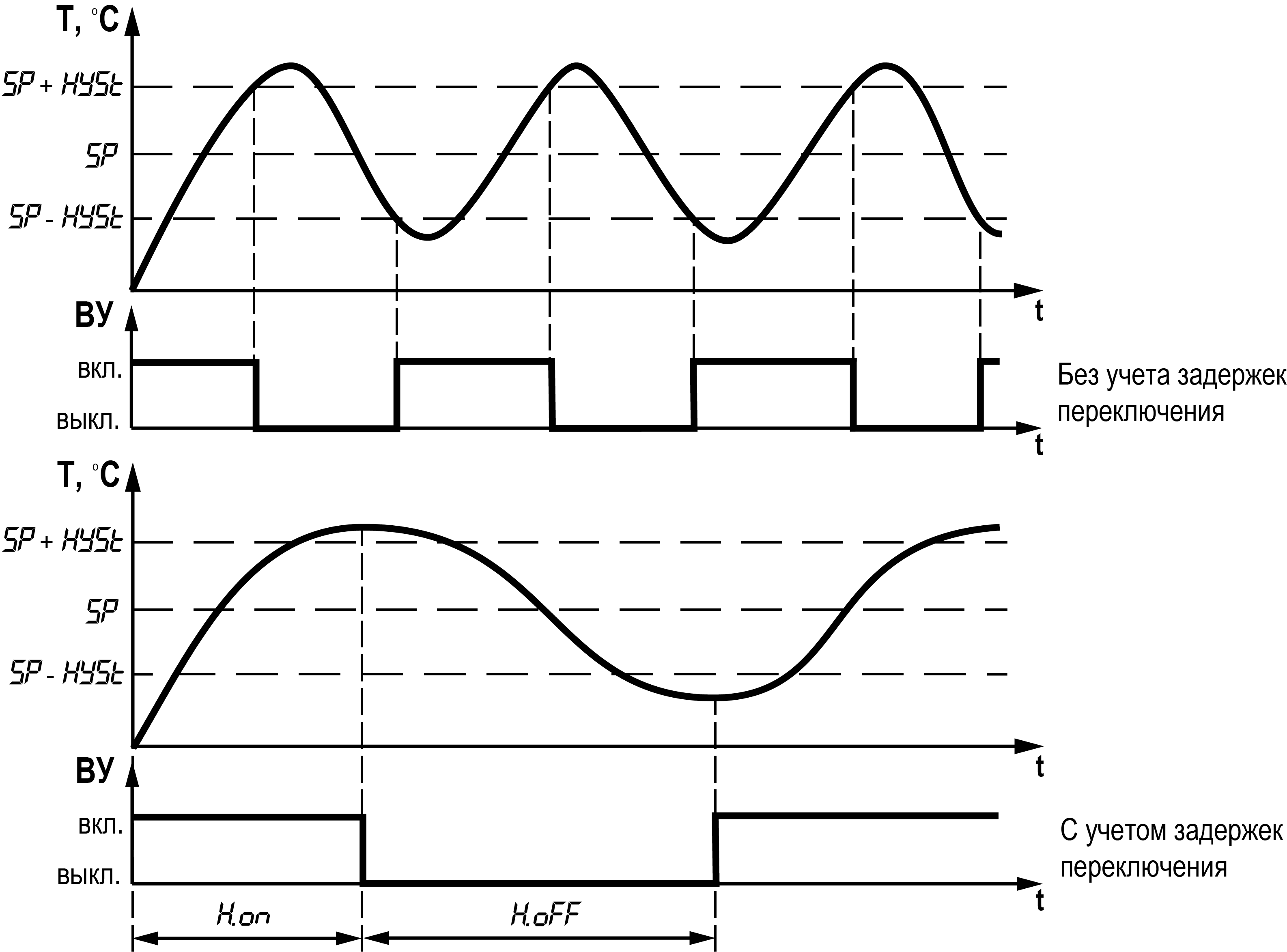
H.On | 0...250 с | 0 | H.On – минимальное
время удержания регулятора в состоянии включено. После замыкания ВУ
условия работы регулятора игнорируются заданное время. H.OFF – минимальное время удержания регулятора в состоянии
выключено. После размыкания ВУ условия работы регулятора игнорируются
заданное время. В период действия времени задержки
работа On-Off регулятора приостанавливается. Все события, кроме аварийных,
игнорируются |
H.OFF | 0...250 с | 0 |
Err.P | 0…100 % | 0.0 | Значение ВУ1 в режиме Авария в случае использования ПИД-регулятора |
StP.P | 0…100 % | 0.0 | Значение ВУ1 в режиме Стоп в случае использования ПИД-регулятора |
A.bnd* | 0...DeltaSens** | 20 | Порог срабатывания сигнализатора Параметр появляется при LOG.d = ALrM. |
A.HYS* | 0...DeltaSens** | 1.0 | Гистерезис срабатывания сигнализатора Параметр появляется при LOG.d = ALrM. |
F.bLC | ON | OFF | Блокировка первого срабатывания сигнализатора Параметр появляется при LOG.d = ALrM. ON – блокируется. OFF – не блокируется. Примечание Блокировка служит для предотвращения
срабатывания сигнализатора при включении прибора до выхода системы
управления на заданный режим работы. Если после включения прибора
значение измеренного сигнала на входе находится вне аварийной зоны,
то блокировка 1-го срабатывания сбрасывается. Флаг обнуляется
при переходе из режима Стоп в режим автоматического регулирования. |
OFF |
Err.d | OFF | OFF | Состояние ВУ в режиме Авария. ON – включен. OFF – выключен |
On |
StP.d | OFF | OFF | Состояние ВУ в режиме Стоп. ON – включен. OFF – выключен Для сигнализатора (LOG.d = ALrM) параметр StP.d скрыт. |
On |
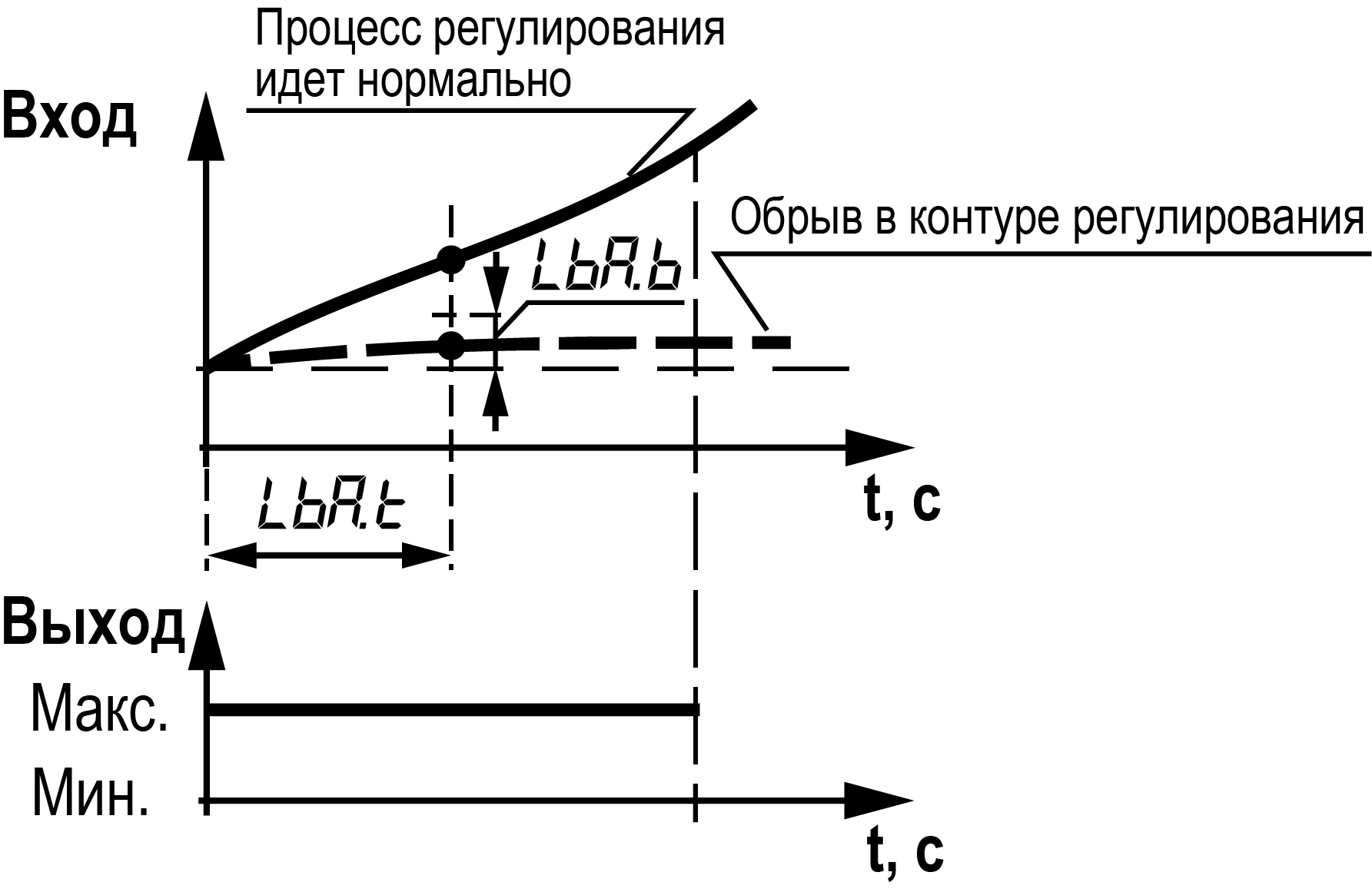
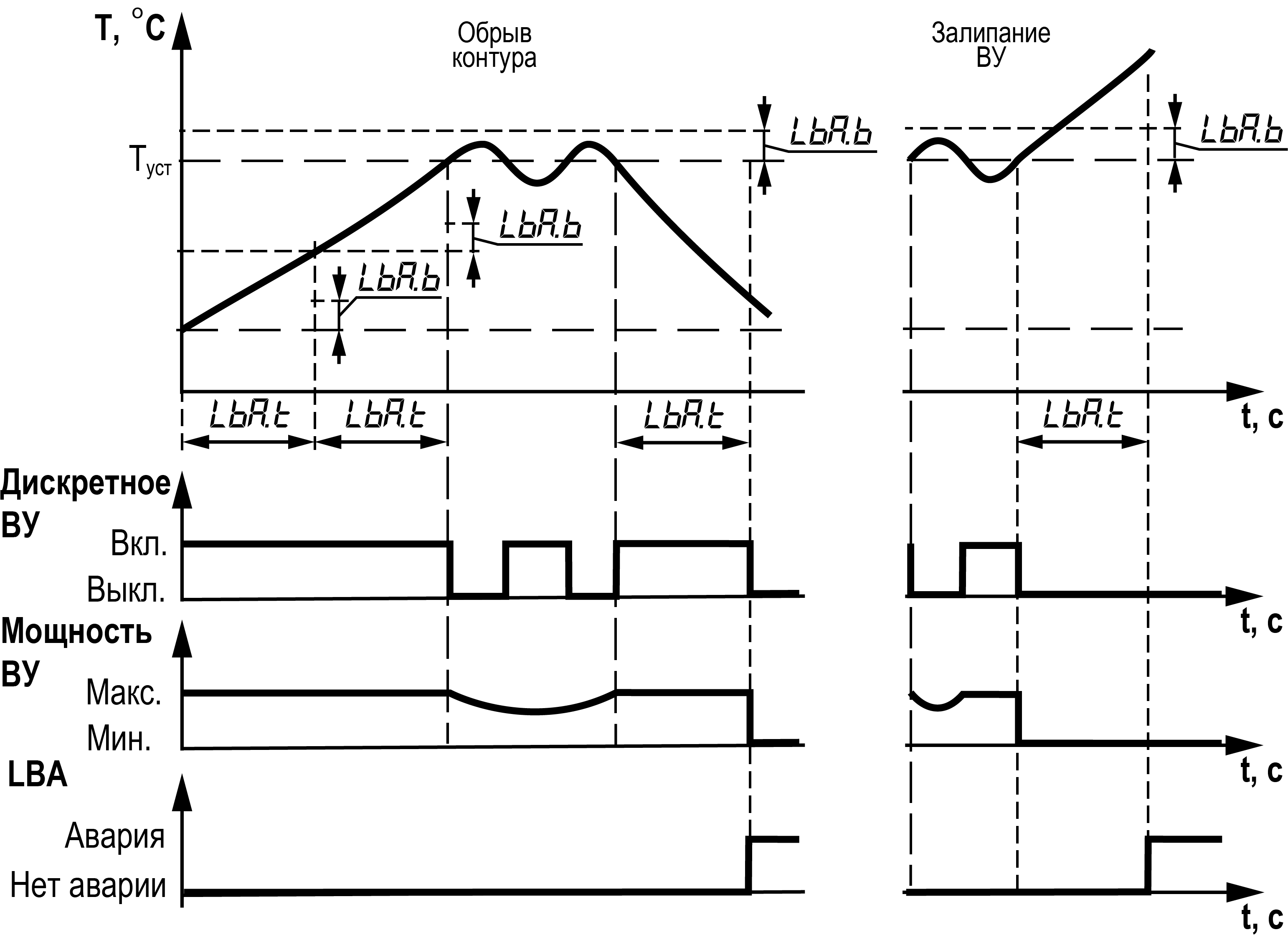
LbA.t | OFF | OFF | Функция диагностики обрыва контура
регулирования. Описание работы функции см. раздел. Для сигнализатора (LOG.d = ALrM) параметры LbA.t и LbA.b скрыты. LbA.t – время диагностики обрыва контура. При значении LbA.t = OFF функция
диагностики обрыва контура регулирования выключена. LbA.b – ширина зоны диагностики обрыва контура. Параметр
появляется, если LbA.t отлично от OFF |
1...9999 с |
LbA.b* | 0...DeltaSens** | 10 |
A.rEC | OFF | OFF | Автоматическое восстановление процесса
регулирования после ошибки на соответствующем входе. Если в
режиме автоматического регулирования произошла аварийная остановка
по причине обрыва датчика или выхода показаний за диапазон измерения,
то при восстановлении измерения процесс регулирования автоматически
запускается через A.rEC секунд. Если A.rEC = OFF, то чтобы восстановить режим автоматического регулирования следует:
Перейти в режим ручного регулирования или режим Стоп. Перейти в режим автоматического регулирования. Примечание Автоматическое восстановление процесса регулирования
не распространяется на обрыв контура регулирования. Обрыв контура
регулирования требует ручного восстановления. |
0...999 с |
Примечание * Положение десятичной точки определяется параметром dPt. ** SensMin – нижняя граница измерения датчика,
SensMax – верхняя граница измерения датчика, DeltaSens – диапазон
измерения датчика. |