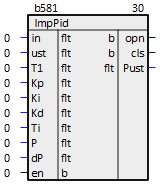
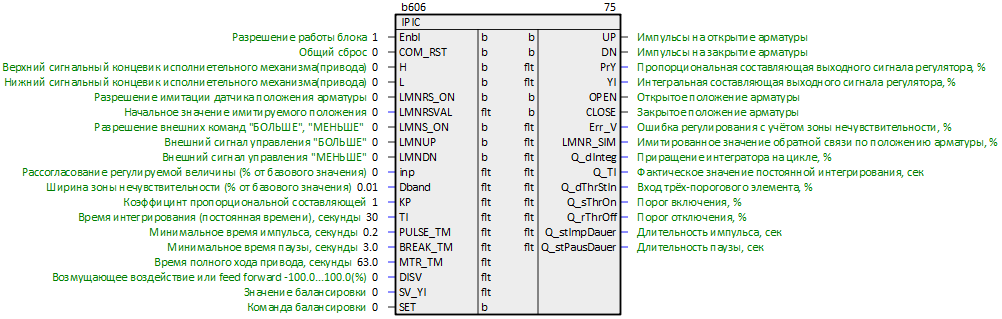
| Входы |
Enbl | Бит разрешения
работы блока |
COM_RST | Бит сброса
и перезагрузки регулятора |
H | Сигнал верхнего
ограничения управляемого исполнительного элемента |
L | Сигнал нижнего
ограничения управляемого исполнительного элемента |
LMNRS_ON | Разрешение
имитации датчика положения управляемого исполнительного элемента |
LMNRSVAL | Начальное
значение имитируемого положения в % |
LMNS_ON | Разрешение
действия внешних команд «больше-меньше» |
LMNUP | Внешний
сигнал управления «больше» |
LMNDN | Внешний
сигнал управления «меньше» |
inp | Рассогласование
регулируемой величины в % от базового значения |
Dband | Ширина зоны
нечувствительности в % от базового значения |
KP | Коэффициент
пропорциональной составляющей |
TI | Постоянная
времени интегральной составляющей в секундах |
PULSE_TM | Минимальная
длительность импульса управления в секундах |
BREAK_TM | Минимальная
длительность паузы в секундах |
MTR_TM | Время полного
хода привода между крайними положениями в секундах |
DISV | Вход дополнительного
внешнего возмущающего воздействия: -100,0...100,0 % |
SV_YI | Значение
балансировки интегральной составляющей в % |
SET | Команда
балансировки интегральной составляющей |
| Выходы |
UP | Импульсы
на открытие управляемого элемента, инициализируется 0 |
DN | Импульсы
на закрытие управляемого элемента, инициализируется 0 |
PrY | Значение
пропорциональной составляющей выходного сигнала регулятора в %, инициализируется 0 |
YI | Значение
интегральной составляющей выходного сигнала регулятора в %, инициализируется 0 |
OPEN | Бит индикации
достижения открытого положения управляемого элемента, инициализируется 0 |
CLOSE | Бит индикации
достижения закрытого положения управляемого элемента, инициализируется 0 |
Err_V | Значение
ошибки регулирования с учетом зоны нечувствительности в %, инициализируется 0 |
LMNR_SIM | Имитированное
значение обратной связи по положению арматуры в % |
Q_dInteg | Приращение
интегратора за цикл в % |
Q_TI | Фактическое
значение постоянной интегрирования в секундах |
Q_dThrStIn | Значение
на входе трех-порогового элемента в % |
Q_sThrOn | Порог включения
в % |
Q_rThrOff | Порог отключения
в % |
Q_stImpDauer | Обратный
отсчет минимальной длительности импульса в секундах |
Q_stPausDauer | Обратный
отсчет минимальной длительности паузы в секундах |