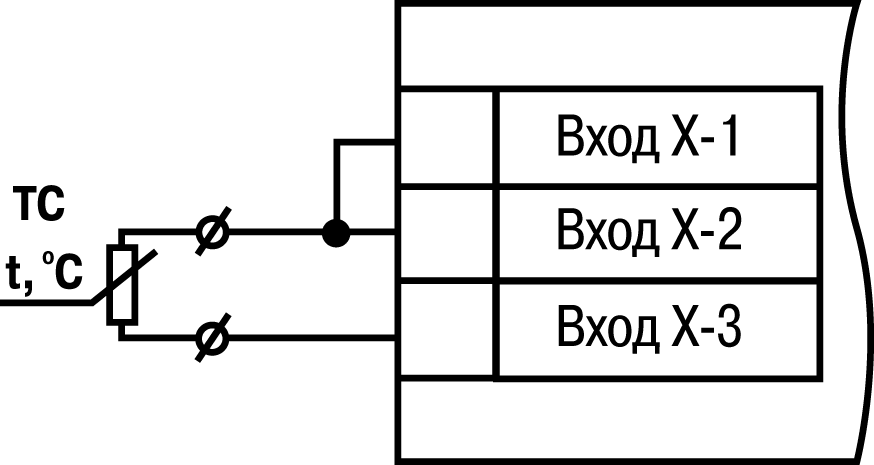
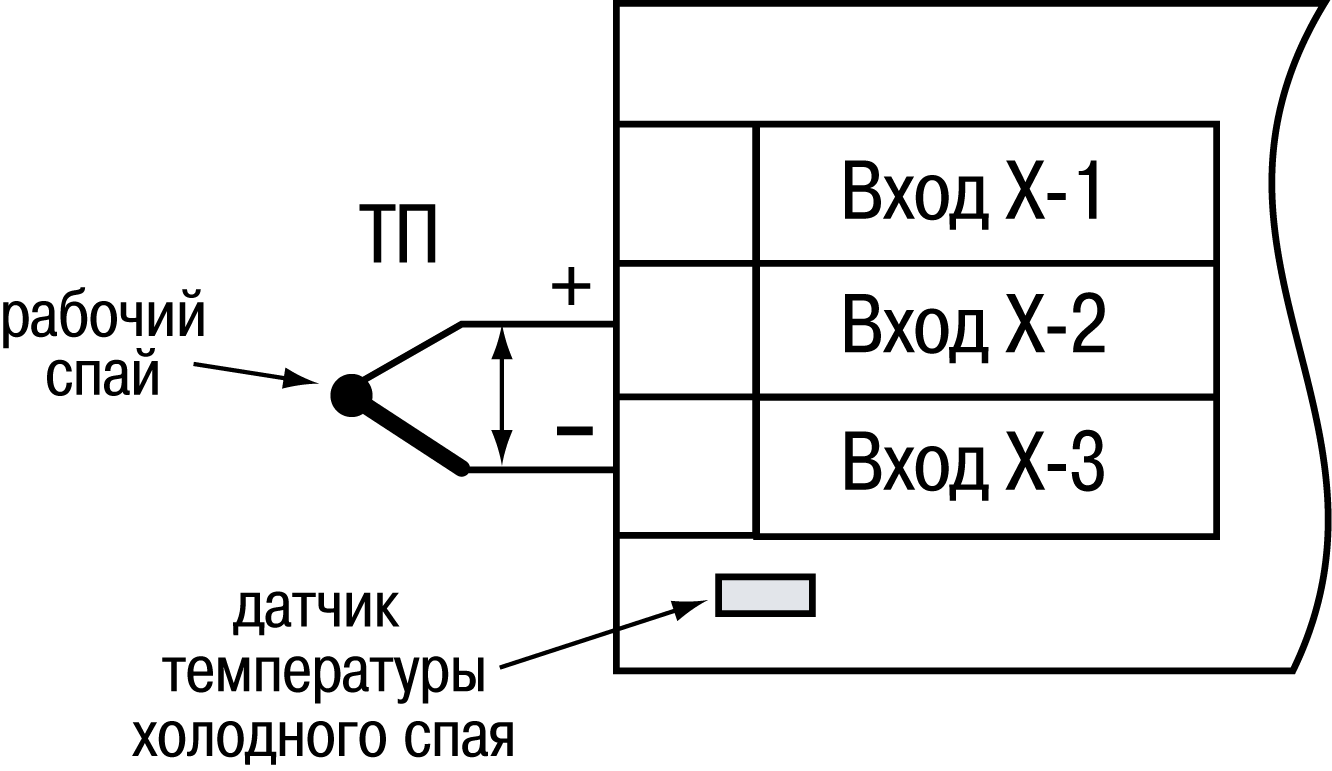
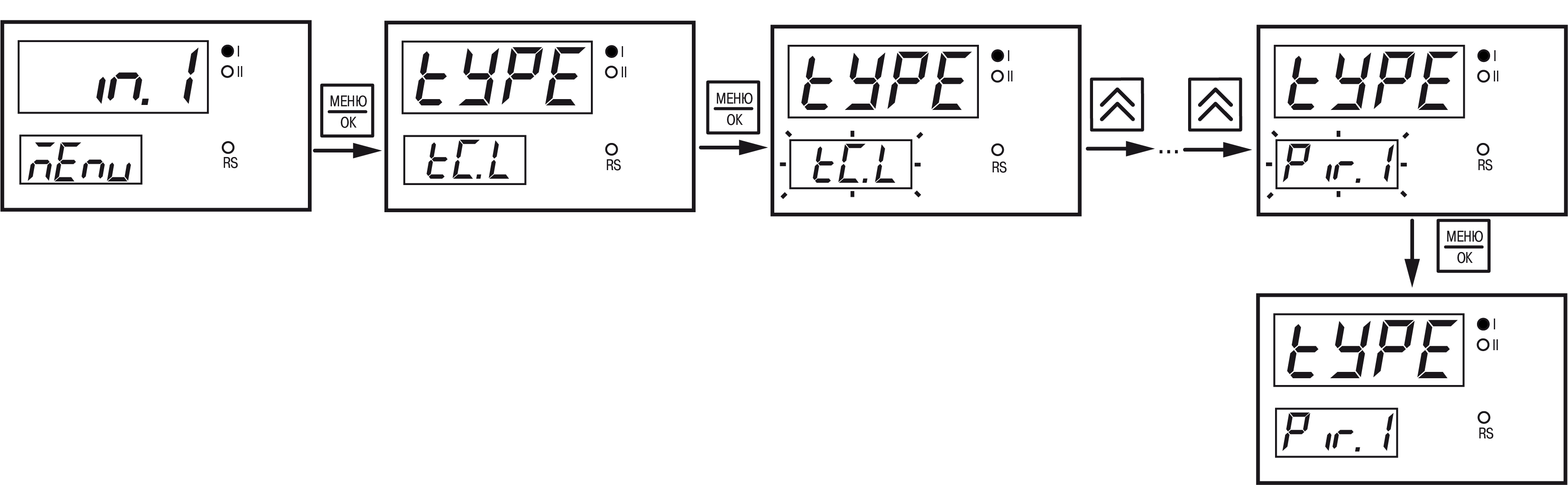
tYPE | OFF | tC.L | Тип датчика. Типы датчиков см. в приложении А |
Типы датчиков |
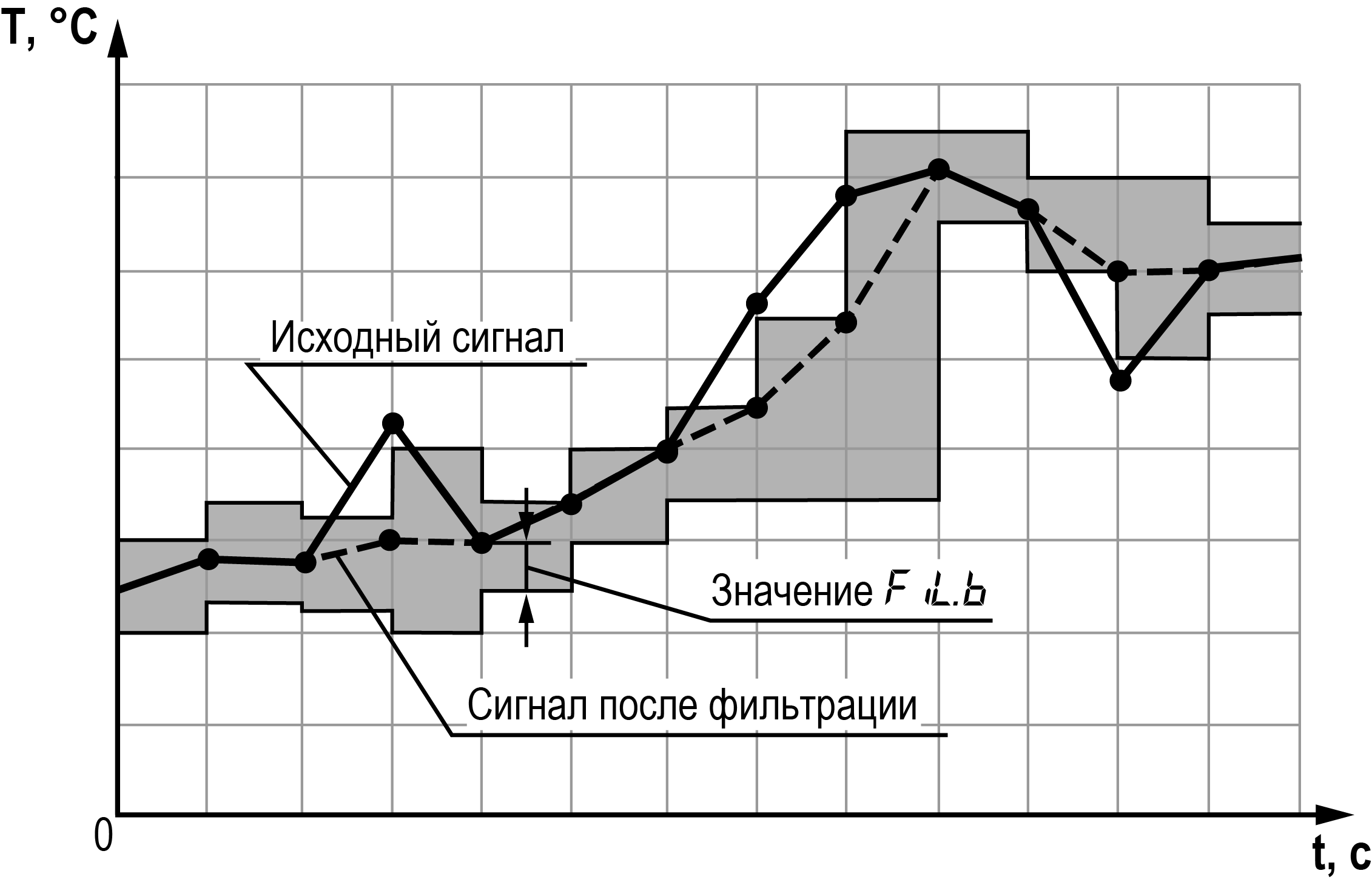
FiL.b* | OFF | 1 | Полоса фильтра. Позволяет отфильтровать
единичные помехи. Полоса фильтра задается в единицах измеряемой величины. Ti – измеренное абсолютное значение сигнала. Ti-1 – предыдущее абсолютное значение сигнала. Если Ti > Ti-1 ± FiL.b, то Ti присваивается значение Ti-1 ± FiL.b (в зависимости от движения значения вверх или вниз)
и FiL.b = 2 * FiL.b (значение полосы
фильтра удваивается). Если значение Ti <
Ti-1 ± FiL.b, то значение FiL.b возвращается на первоначальное. Малая ширина полосы
фильтра приводит к замедлению реакции на быстрое изменение входной
величины. При низком уровне помех или при работе с быстро меняющимися
процессами рекомендуется увеличить значение параметра FiL.b или отключить действие полосы фильтра, установив значение FiL.b = OFF. В случае высокого уровня
помех следует уменьшить значение параметра для устранения их влияния
на работу прибора. |
DeltaSens** |
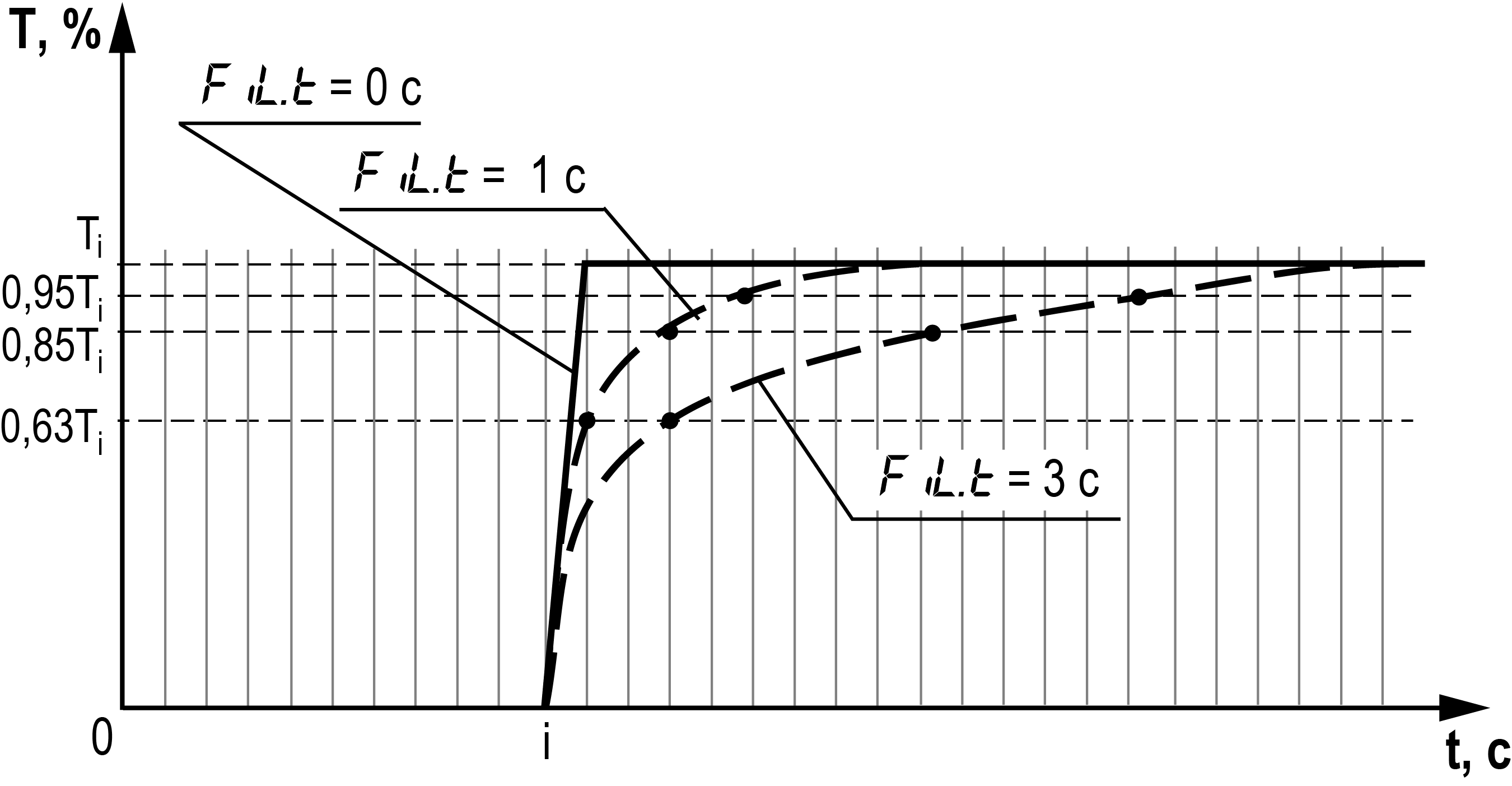
FiL.t | OFF | 10 | Постоянная времени фильтра (tф). Интервал, в течение которого сигнал достигает 0,63
от значения каждого измерения Ti. Значение сигнала
рассчитывается по формуле: Ti = Ti-tф + (Ti – Ti-tф) * 0,63. Уменьшение значения FiL.t приводит к
ускорению реакции на скачкообразные изменения температуры, но снижает
помехозащищенность. Увеличение FiL.t повышает инерционность
и подавляет шумы. |
1...999 |
dPt | 0 | 1 | Положение десятичной точки. Количество знаков после запятой, которое будет выводиться на ЦИ. Значение AutO – положение точки автоматически
выбирается для отображения максимального возможного количества разрядов. Если значение не может быть отображено на ЦИ, то на ЦИ будут выведены
сообщения об ошибках Hi или Lo. |
1 |
2 |
3 |
AutO |
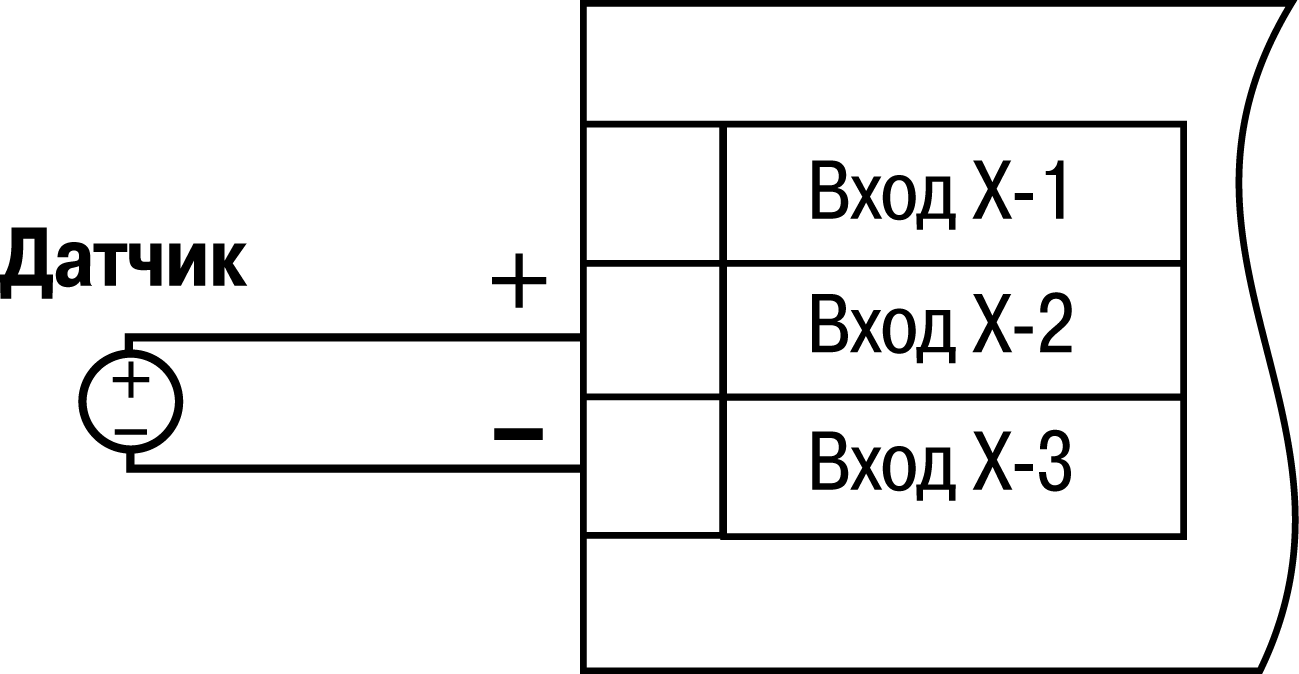
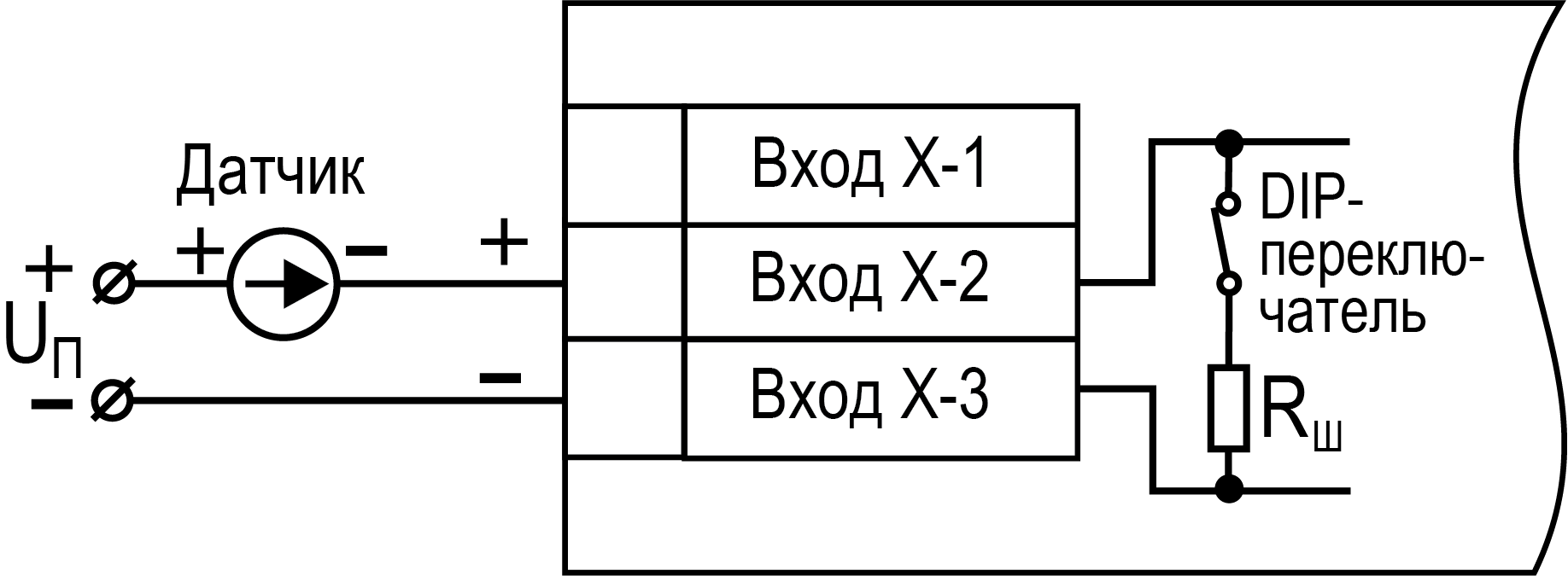
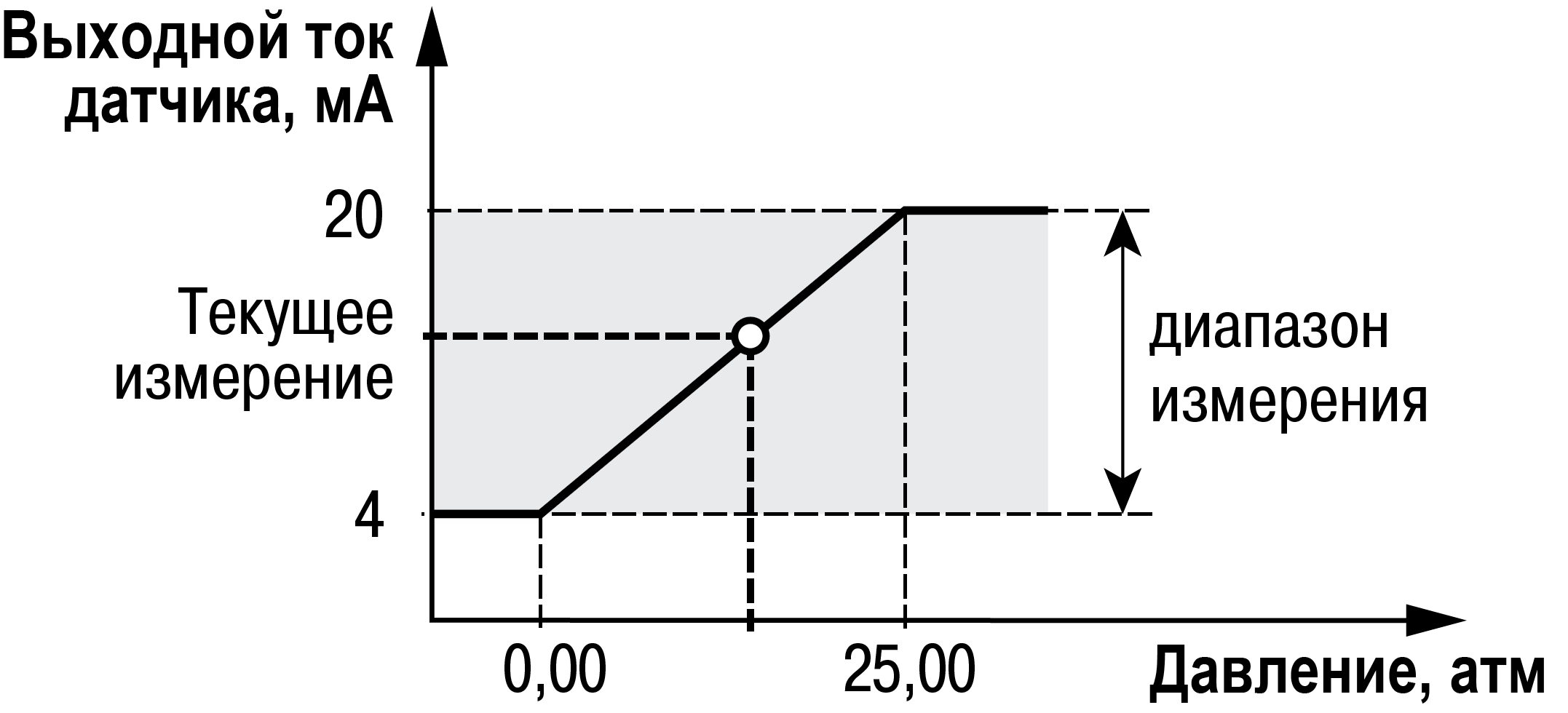
ind.L* | –1999...9999 | 0.0 | Параметры для приведения индикации
измеренных значений тока и напряжения к значению физической величины. Параметры настраиваются для сигналов 0...5 мА, 0...20 мА, 4...20
мА, –50...+50 мВ, 0...1 В. Для других типов датчиков данные параметры
скрыты. ind.L – индикация при минимальном
значении сигнала (0 мА, 4 мА, –50 мВ, 0 В). ind.H – индикация при максимальном значении сигнала (5 мА, 20 мА, 50 мВ,
1 В). Все остальные промежуточные значения индикации
располагаются линейно и высчитываются прибором по формуле: T
= ind.L + IX * (ind.H – ind.L), где IX – значение
сигнала с датчика в относительных единицах диапазона от 0,000 до 1,000. Пример. Используется датчик с выходным током 4…20 мА,
контролирующий давление в диапазоне 0…25 атм. В параметре ind.L задается значение 0.00, а в параметре ind.H значение 25.00. Теперь значения будут отображаться в атмосферах. |
ind.H* | –1999...9999 | 100.0 |
| FunC | | oFF | Математические функции |
OFF | oFF – математические функции не используются |
SQrt | SQrt – вычисление квадратного корня из текущего значения:

|
SuM |  Примечание ПримечаниеЕсли CF1 и CF2 ≠ 1, то расчет формул SuM, diFF, ASuM и SQSM производится отдельно для каждого канала. SuM – взвешенная сумма значений двух каналов:

|
diFF | diFF – взвешенная разность значений двух каналов:

|
ASuM | ASuM – средневзвешенная сумма значений двух каналов:

|
SQSM | SQSM – квадратный корень из средневзвешенной суммы значений
двух каналов:

где T – результат вычисления функции; CF.1 и CF.2 – дополнительные коэффициенты
для расчета значений, которые вводятся в настройках прибора; T1 и T2 – сигналы на входах 1 и 2 соответственно |
CF.1 | –100.0...100.0 | 1.0 | Коэффициенты для расчета значений
по математическим функциям. Параметры доступны, если в параметре FunC установлено одно из следующих значений: SuM, diFF, ASuM и SQSM |
CF.2 | –100.0...100.0 | 1.0 |
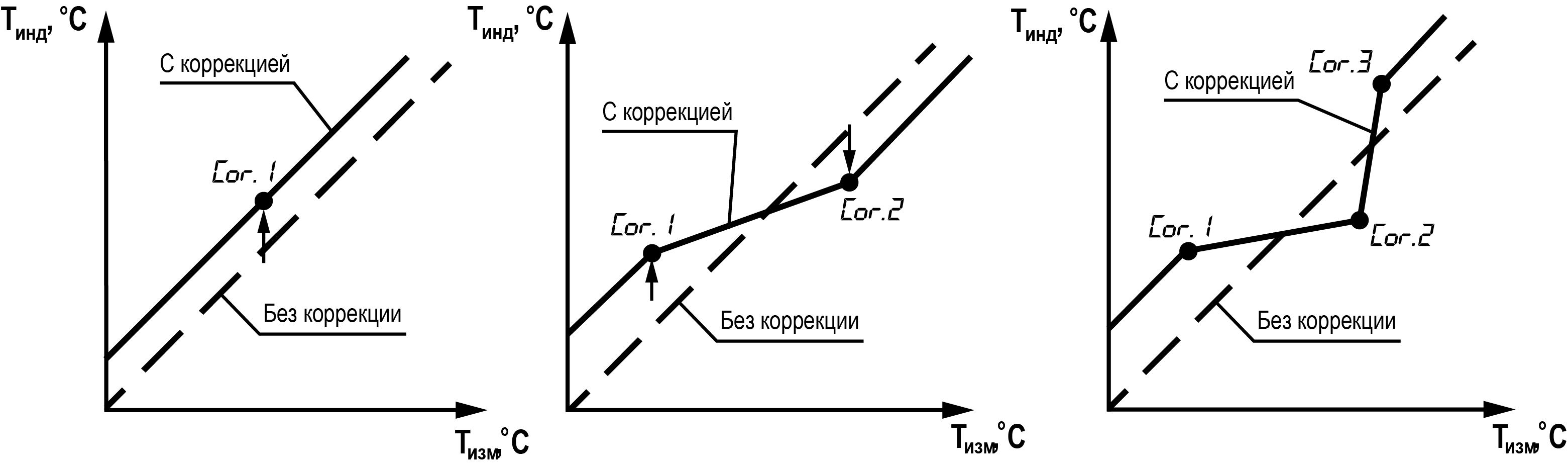
Corr* | | | Подменю |
Cor.1* Cor.2* Cor.3* | OFF SensMin... SensMax** | OFF | Параметры коррекции графика измерителя. Используются для компенсации погрешности подключенных датчиков
или компенсации сопротивления проводов (для подключения ТС по двухпроводной
схеме), когда есть возможность определить с помощью дополнительного
оборудования точное значение измеренного сигнала, тем самым скорректировать
показания прибора. Методика коррекции приведена в разделе. |
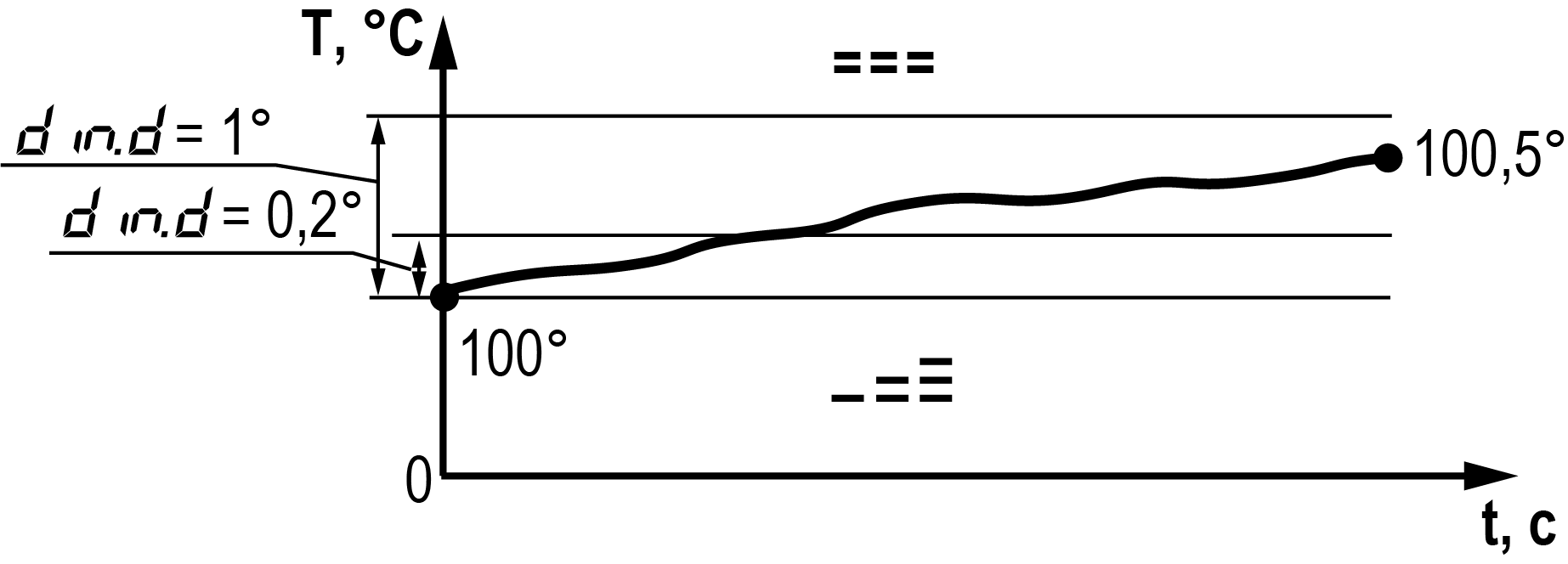
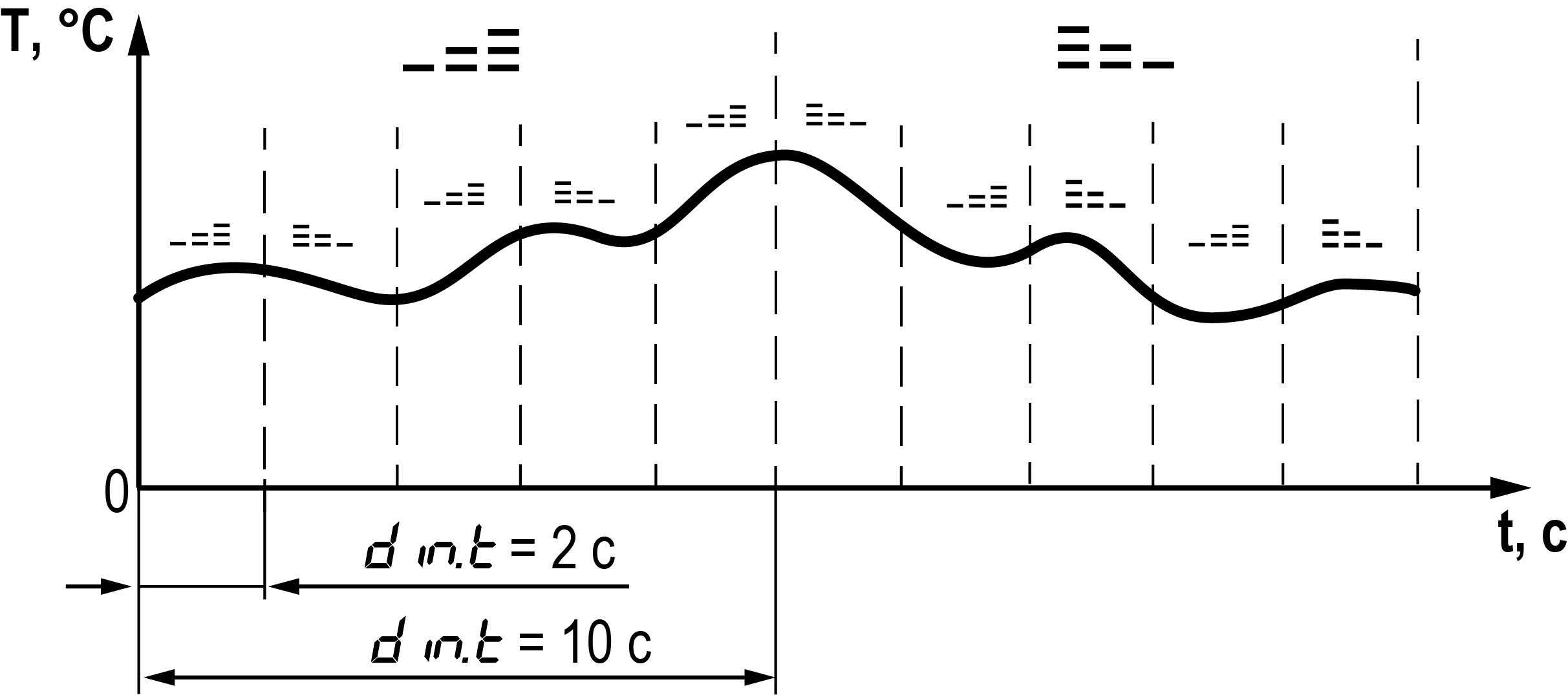
din.t | 0...30 | 10 | Параметры функции отслеживания динамики
изменения входного сигнала. din.t – период
анализа динамики изменения сигнала. din.d –
дельта динамики сигнала. За заданный период (din.t) анализируется динамика изменения сигнала. Прибор
вычитает из текущего измеренного значения предыдущее и добавляет разницу
к накопительному буферу. После накопления буфера за период din.t производится сравнение его содержимого со значением
дельты динамики сигнала din.d по модулю. Буфер
скользящий, т. е. в последующую секунду появляется новое значение,
а последнее значение исключается из буфера. Затем динамика перерасчитывается. Если текущее значение буфера меньше din.d, то
динамика сигнала определяется как «без изменений». Если текущее значение
буфера больше din.d, то динамика определяется по
знаку буфера (положительное значение – возрастает, отрицательное –
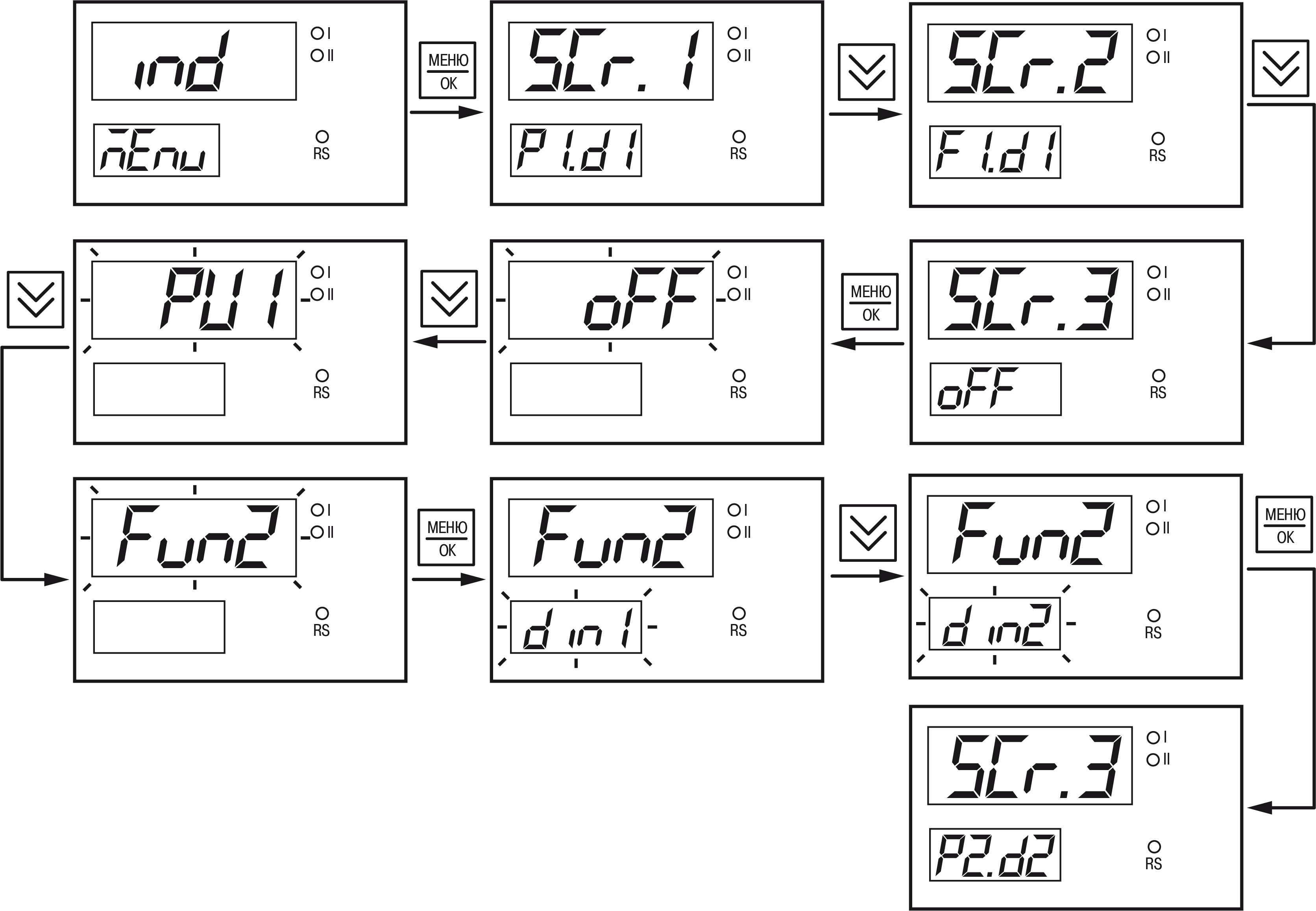
убывает). При выборе параметра din1 или din2 (для 1-го или 2-го входа соответственно) в параметре SCrX (меню ind) на нижнем индикаторе будет
отображаться динамика измеряемой величины на соответствующем входе. |
din.d | 0.2...DeltaSens** | 0.2 |
bArr | OFF | OFF | Подключение барьера искрозащиты. Примечание Параметр bArr доступен только
для датчиков типа ТС. Для работы с ТС, подключенными
через барьер искрозащиты, следует присвоить значение On. Диапазон измерений входного сопротивления будет расширен, чтобы
скомпенсировать проходное сопротивление барьера искрозащиты. Для сохранения
точности измерений рекомендуется выполнить процедуру корректировки
в соответствии с компенсацией сопротивления соединительных проводов
для трехпроводной линии. Примечание При bArr = On дополнительная приведенная погрешность составляет
не более 0.5 %. Величина дополнительной приведенной погрешности определяется
типом и характеристиками используемого барьера искрозащиты. |
On |
Примечание * Положение десятичной точки определяется параметром dPt. ** SensMin – нижняя граница измерения датчика,
SensMax – верхняя граница измерения датчика, DeltaSens – диапазон
измерения датчика. |