Настройка параметров
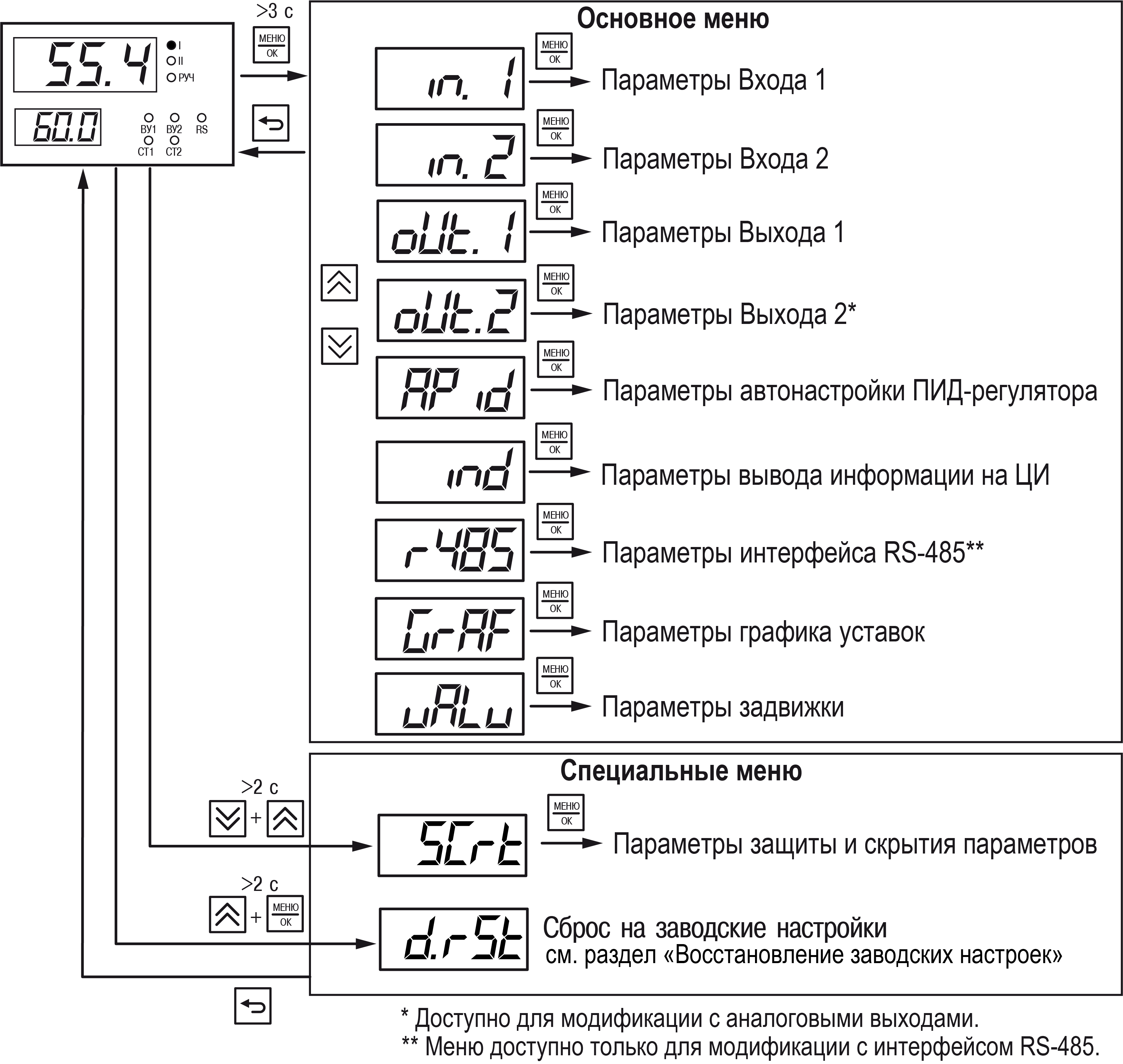
Текущий параметр редактируется кратковременным нажатием кнопки  .
.
Модификации прибора с интерфейсом RS-485 можно настроить с ПК при помощи Owen Configurator. Для настройки следует использовать версию Owen Configurator не ниже 1.23.115.
Для подключения к прибору следует указать:
Номер СОМ-порта к которому подключен прибор через преобразователь АС4–М.
Протокол — Modbus RTU.
Скорость — 9600.
Из выпадающего списка Устройства в категории Регуляторы выбрать модель прибора.
Настройка входов
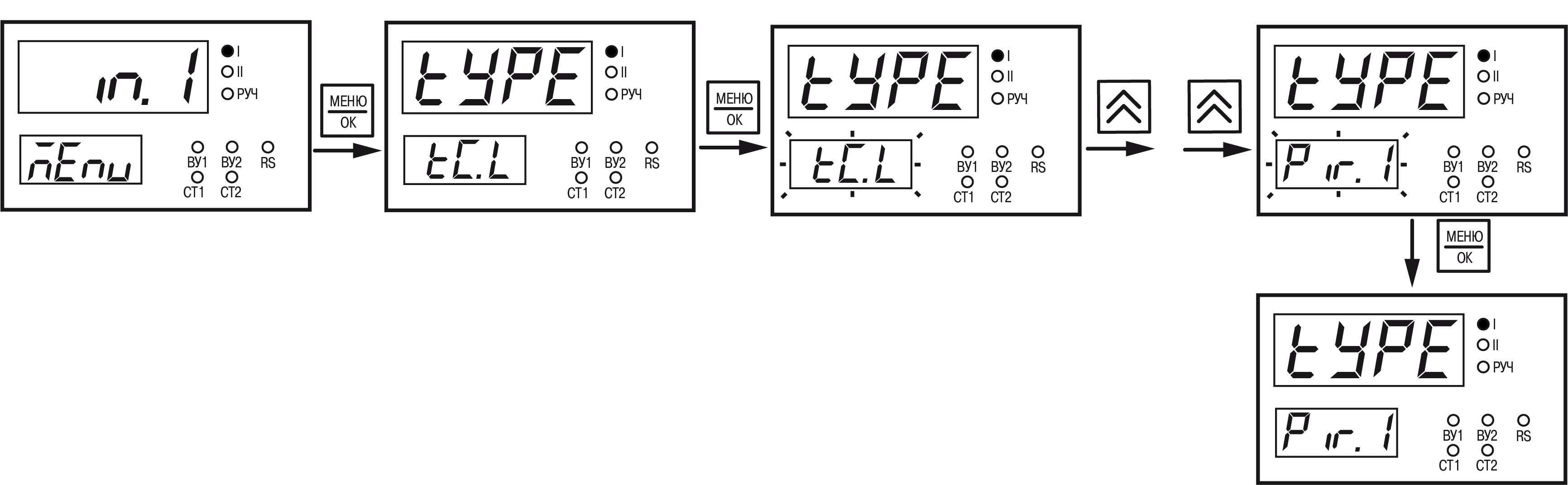
Настройка входа 1
Параметры для входа 1 (меню in1) представлены в таблице.
Параметры входов
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
| (1) | (2) | ||
tYPE | OFF | tC.L | Тип датчика. Типы датчиков см. в приложении А |
Типы датчиков | |||
FiL.b* | OFF | 1 | Полоса фильтра. Позволяет отфильтровать единичные помехи. Полоса фильтра задается в единицах измеряемой величины. Ti – измеренное абсолютное значение сигнала. Ti-1 – предыдущее абсолютное значение сигнала.
Если Ti > Ti-1 ± FiL.b, то Ti присваивается значение Ti-1 ± FiL.b (в зависимости от движения значения вверх или вниз) и FiL.b = 2 * FiL.b (значение полосы фильтра удваивается).
Если значение Ti < Ti-1 ± FiL.b, то значение FiL.b возвращается на первоначальное.
Малая ширина полосы фильтра приводит к замедлению реакции на быстрое изменение входной величины. При низком уровне помех или при работе с быстро меняющимися процессами рекомендуется увеличить значение параметра FiL.b или отключить действие полосы фильтра, установив значение FiL.b = OFF. В случае высокого уровня помех следует уменьшить значение параметра для устранения их влияния на работу прибора. 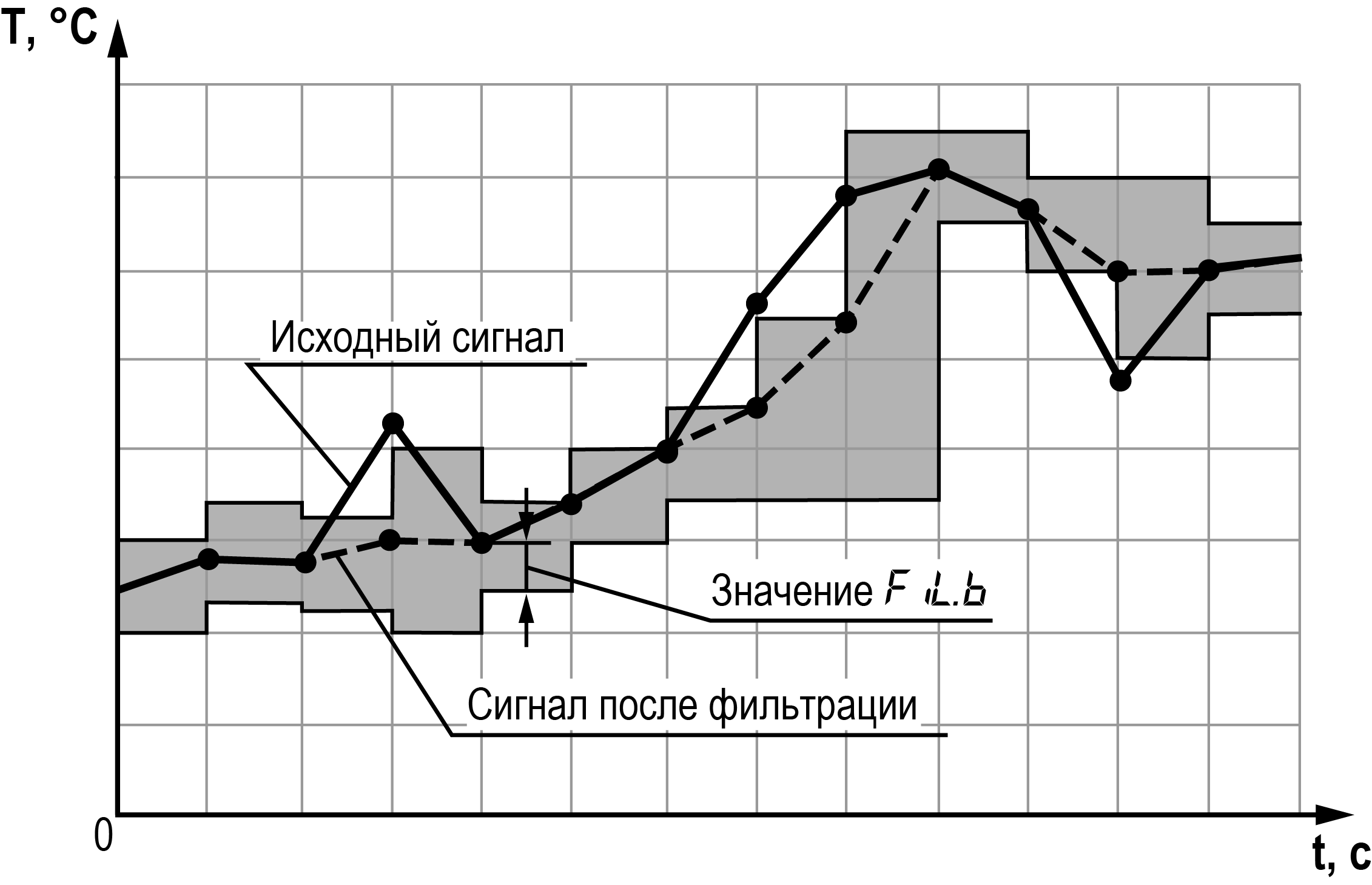 |
DeltaSens** | |||
FiL.t | OFF | 10 | Постоянная времени фильтра (tф). Интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения Ti. Значение сигнала рассчитывается по формуле: Ti = Ti-tф + (Ti – Ti-tф) * 0,63.
Уменьшение значения FiL.t приводит к ускорению реакции на скачкообразные изменения температуры, но снижает помехозащищенность. Увеличение FiL.t повышает инерционность и подавляет шумы. 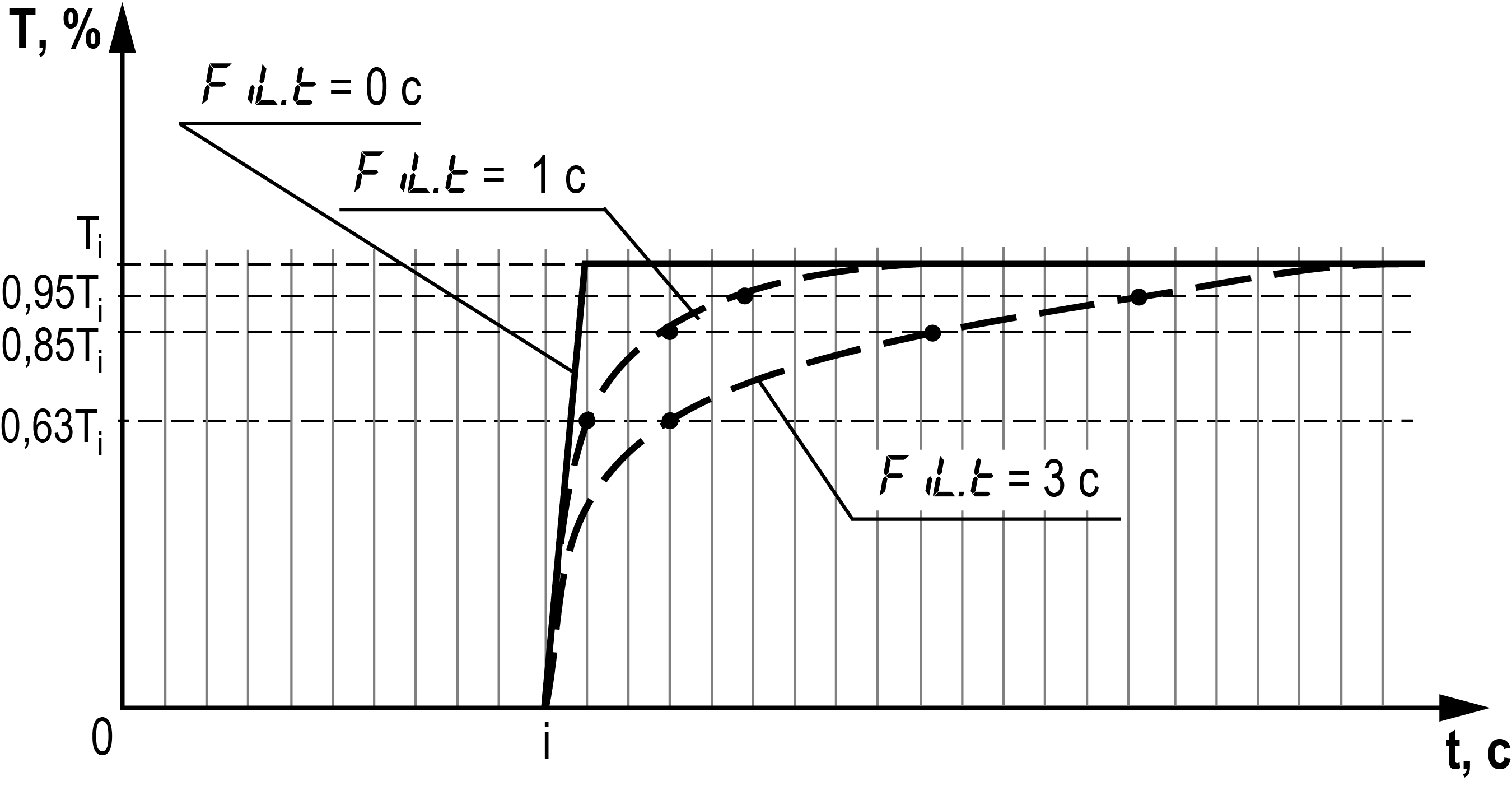 |
1...999 | |||
dPt | 0 | 1 | Положение десятичной точки. Количество знаков после запятой, которое будет выводиться на ЦИ. Значение AutO – положение точки автоматически выбирается для отображения максимального возможного количества разрядов. Если значение не может быть отображено на ЦИ, то на ЦИ будут выведены сообщения об ошибках Hi или Lo. |
1 | |||
2 | |||
3 | |||
AutO | |||
ind.L* | –1999...9999 | 0.0 | Параметры для приведения индикации измеренных значений тока и напряжения к значению физической величины. Параметры настраиваются для сигналов 0...5 мА, 0...20 мА, 4...20 мА, –50...+50 мВ, 0...1 В. Для других типов датчиков данные параметры скрыты.
ind.L – индикация при минимальном значении сигнала (0 мА, 4 мА, –50 мВ, 0 В). ind.H – индикация при максимальном значении сигнала (5 мА, 20 мА, 50 мВ, 1 В).
Все остальные промежуточные значения индикации располагаются линейно и высчитываются прибором по формуле: T = ind.L + IX * (ind.H – ind.L),
где IX – значение сигнала с датчика в относительных единицах диапазона от 0,000 до 1,000.
Пример. Используется датчик с выходным током 4…20 мА, контролирующий давление в диапазоне 0…25 атм. В параметре ind.L задается значение 0.00, а в параметре ind.H значение 25.00. Теперь значения будут отображаться в атмосферах. 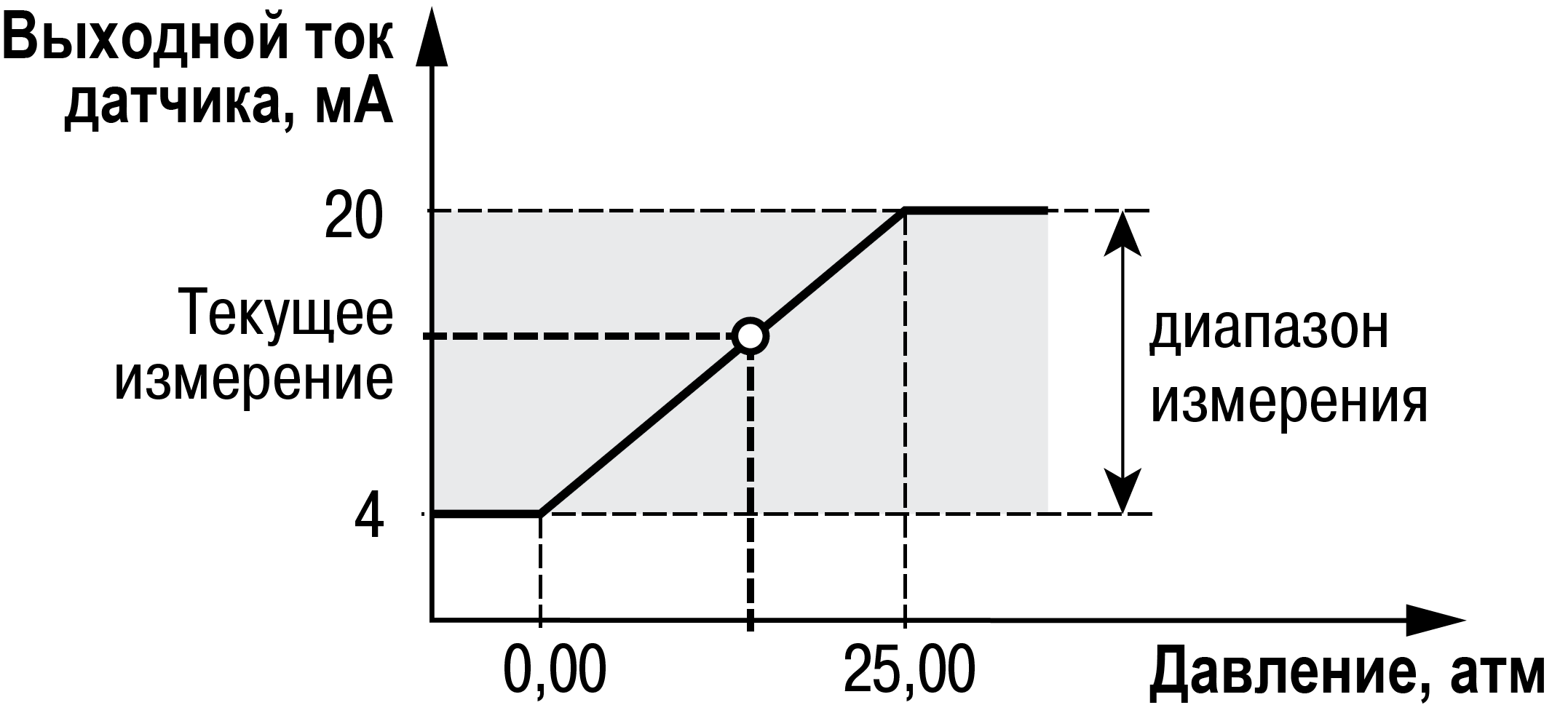 |
ind.H* | –1999...9999 | 100.0 | |
| FunC | oFF | Математические функции | |
OFF | oFF – математические функции не используются | ||
SQrt | SQrt – вычисление квадратного корня из текущего значения: 
| ||
SuM | SuM – взвешенная сумма значений двух каналов: 
Если CF1 и CF2 > 1, то расчет формул SuM, diFF, ASuM и SQSM производится отдельно для каждого канала. | ||
diFF | diFF – взвешенная разность значений двух каналов: 
| ||
ASuM | ASuM – средневзвешенная сумма значений двух каналов: 
| ||
SQSM | SQSM – квадратный корень из средневзвешенной суммы значений двух каналов: 
где T – результат вычисления функции; CF.1 и CF.2 – дополнительные коэффициенты для расчета значений, которые вводятся в настройках прибора; T1 и T2 – сигналы на входах 1 и 2 соответственно | ||
CF.1 | –100.0...100.0 | 1.0 | Коэффициенты для расчета значений по математическим функциям. Параметры доступны, если в параметре FunC установлено одно из следующих значений: SuM, diFF, ASuM и SQSM |
CF.2 | –100.0...100.0 | 1.0 | |
Corr* | Подменю | ||
Cor.1* Cor.2* Cor.3* | OFF SensMin... SensMax** | OFF | Параметры коррекции графика измерителя. Используются для компенсации погрешности подключенных датчиков или компенсации сопротивления проводов (для подключения ТС по двухпроводной схеме), когда есть возможность определить с помощью дополнительного оборудования точное значение измеренного сигнала, тем самым скорректировать показания прибора. Методика коррекции приведена в разделе. |
din.t | 0...30 | 10 | Параметры функции отслеживания динамики изменения входного сигнала. din.t – период анализа динамики изменения сигнала. din.d – дельта динамики сигнала.
За заданный период (din.t) анализируется динамика изменения сигнала. Прибор вычитает из текущего измеренного значения предыдущее и добавляет разницу к накопительному буферу. После накопления буфера за период din.t производится сравнение его содержимого со значением дельты динамики сигнала din.d по модулю. 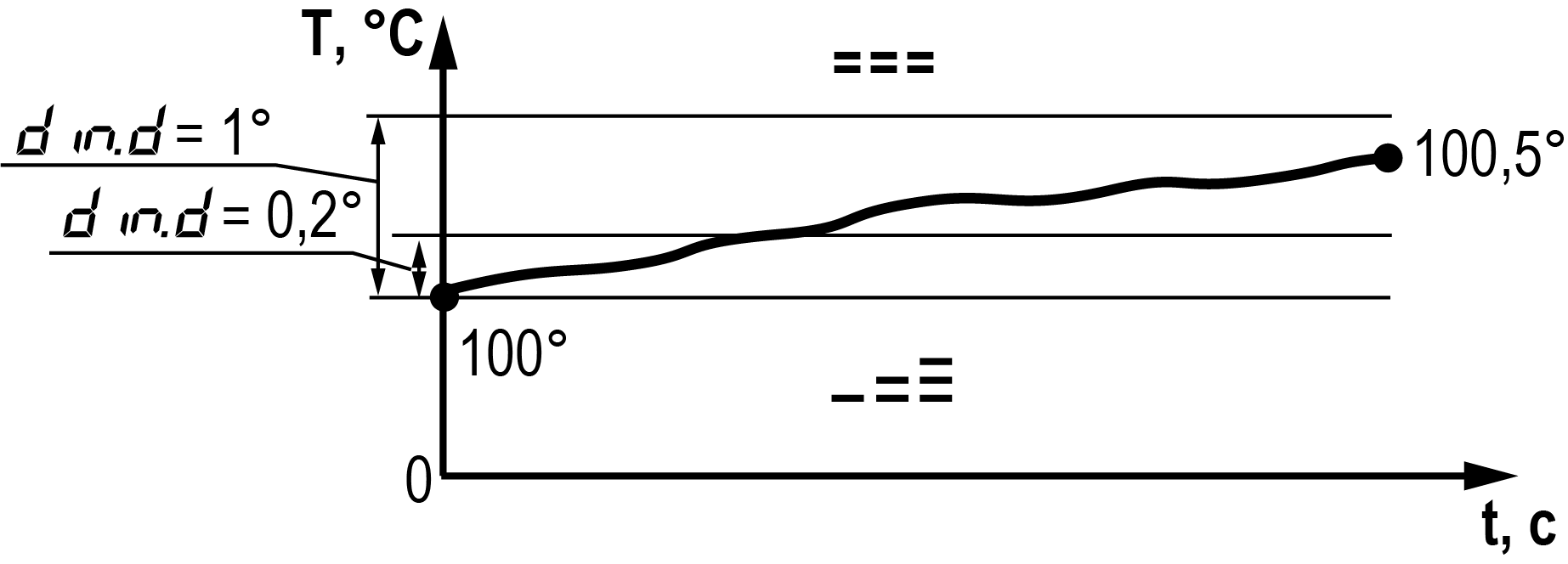 Буфер скользящий, т. е. в последующую секунду появляется новое значение, а последнее значение исключается из буфера. Затем динамика перерасчитывается. 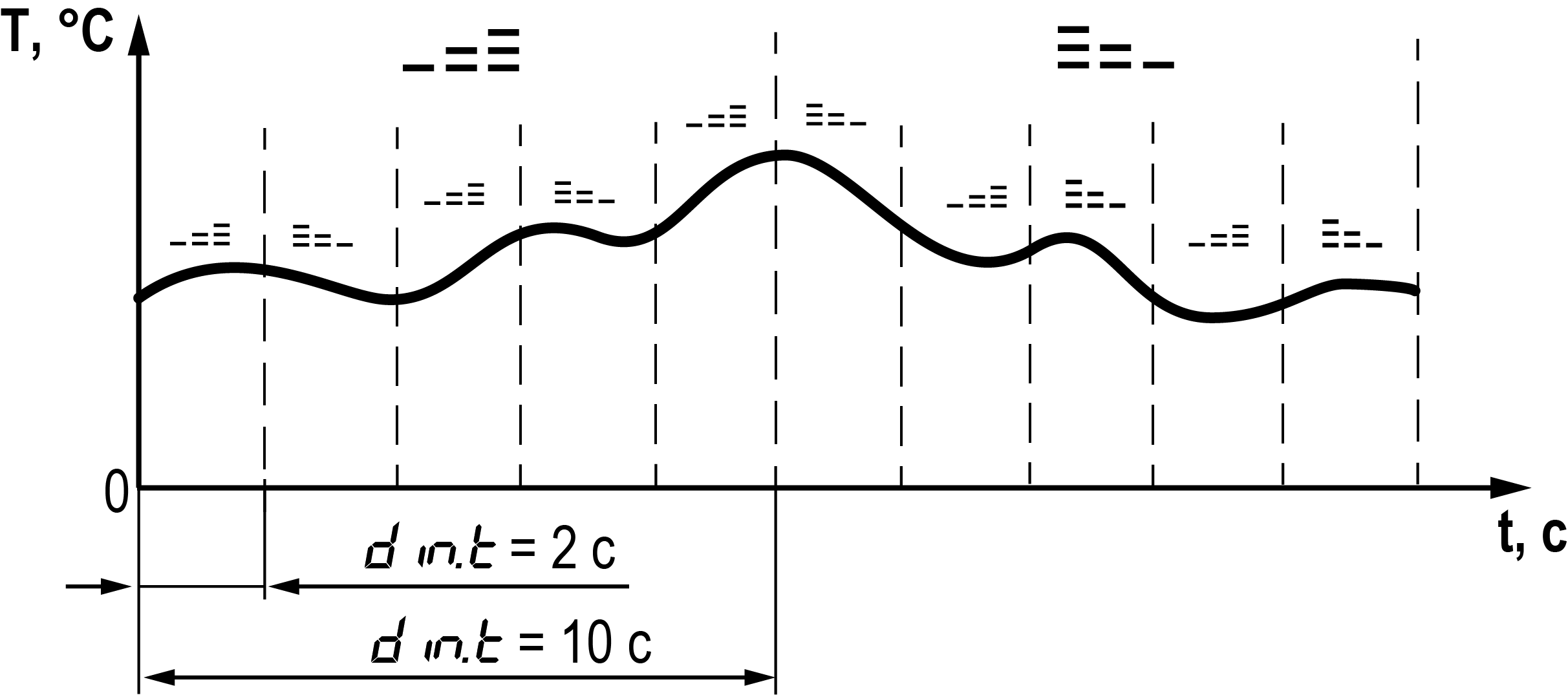 Если текущее значение буфера меньше din.d, то динамика сигнала определяется как «без изменений». Если текущее значение буфера больше din.d, то динамика определяется по знаку буфера (положительное значение – возрастает, отрицательное – убывает). При выборе параметра din1 или din2 (для 1-го или 2-го входа соответственно) в параметре SCrX (меню ind) на нижнем индикаторе будет отображаться динамика измеряемой величины на соответствующем входе.  |
din.d | 0.2...DeltaSens** | 0.2 | |
bArr | OFF | OFF | Подключение барьера искрозащиты. Параметр bArr доступен только для датчиков типа ТС. Для работы с ТС, подключенными через барьер искрозащиты, следует присвоить значение On. Диапазон измерений входного сопротивления будет расширен, чтобы скомпенсировать проходное сопротивление барьера искрозащиты. Для сохранения точности измерений рекомендуется выполнить процедуру корректировки в соответствии с компенсацией сопротивления соединительных проводов для трехпроводной линии. При bArr = On дополнительная приведенная погрешность составляет не более 0.5 %. Величина дополнительной приведенной погрешности определяется типом и характеристиками используемого барьера искрозащиты. |
On | |||
* Положение десятичной точки определяется параметром dPt. ** SensMin – нижняя граница измерения датчика, SensMax – верхняя граница измерения датчика, DeltaSens – диапазон измерения датчика. | |||
Коррекция показаний прибора
Для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами, измеренное прибором значение можно скорректировать.
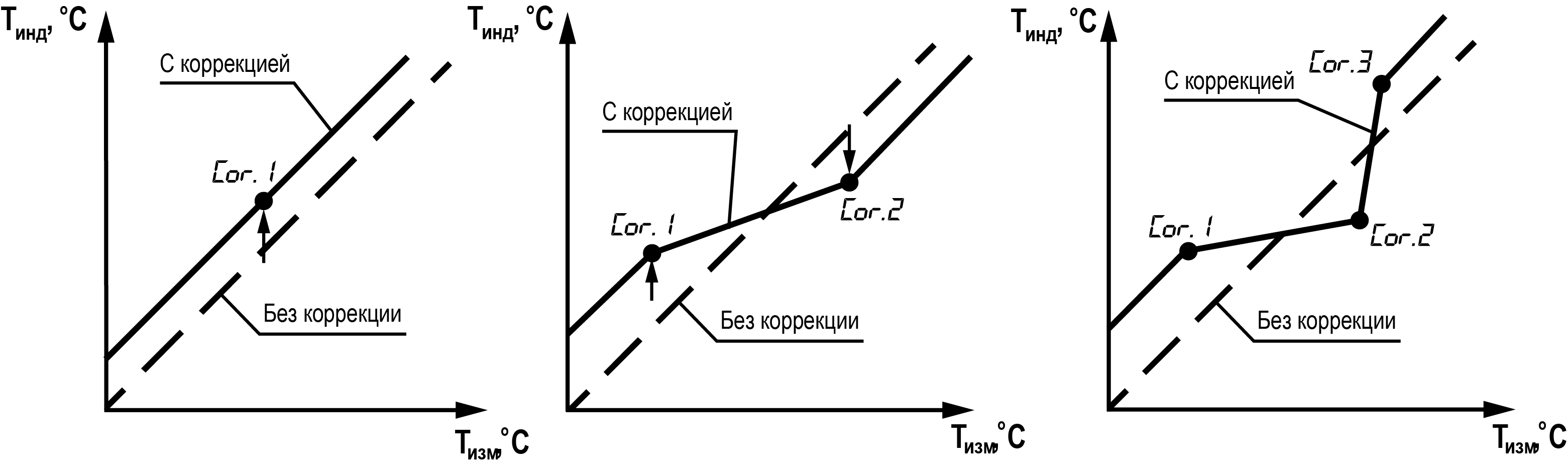
График НСХ корректируется в зависимости от количества заданных точек. В случае установки одной точки весь график будет смещен вверх или вниз на заданную величину. В случае установки двух или трех точек график будет строиться по сплайнам между двумя ближайшими точками, определяющими абсолютное смещение или наклон (см. рисунок).
Для коррекции показаний прибора следует:
Выбрать один из параметров COr.1, COr.2 и COr.3 и нажать кнопку
. Запустится процесс
корректировки. На нижнем ЦИ выводится измеренная температура, вычисленная в соответствии с НСХ используемого датчика (значение мигает), на верхнем ЦИ – номер точки коррекции.
Подстроить кнопками
 и
и  значение температуры на нижнем ЦИ до соответствия подключенной
образцовой мере входного сигнала (магазин сопротивления, калибратор
напряжения, тока и пр.), либо показаниям контрольного прибора.
значение температуры на нижнем ЦИ до соответствия подключенной
образцовой мере входного сигнала (магазин сопротивления, калибратор
напряжения, тока и пр.), либо показаниям контрольного прибора. После установки скорректированного значения требуется нажать кнопку
для
фиксации показаний. На нижнем ЦИ будет зафиксировано скорректированное
значение и индикатор перестанет мигать.
Кратковременное нажатие на кнопку отобразит на верхнем ЦИ значение смещения.
При длительном удержании (3 секунды) кнопки происходит запрос
на удаление точки корректировки. На нижнем ЦИ мигает значение ErS.
В случае нажатия кнопки точка корректировки удаляется и на ЦИ отображается OFF.
В случае нажатия кнопки 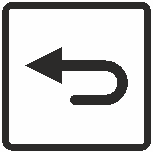 процесс удаления параметра отменяется.
процесс удаления параметра отменяется.
В случае изменения типа датчика параметры коррекции сохраняются. Для нового датчика следует удалить точки коррекции или провести корректировку заново.
Настройка входа 2
Параметры для входа 2 (меню in2) представлены в таблице.
Параметры входов
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
| (1) | (2) | ||
tYPE | OFF | OFF | Тип датчика. Типы датчиков см. в приложении А |
Типы датчиков | |||
D.StP | Дискретный вход Переход из режима автоматического регулирования в режим Стоп. Замкнутое состояние кнопки соответствует переходу в режим ручного регулирования | ||
D.Man | Дискретный вход Переход из режима автоматического регулирования в режим ручного регулирования. Замкнутое состояние кнопки соответствует переходу в режим ручного регулирования | ||
PoS.r | Резистивный датчик положения задвижки | ||
PoS.I | Токовый датчик положения задвижки | ||
FiL.b* | OFF | 1 | Полоса фильтра. Позволяет отфильтровать единичные помехи. Полоса фильтра задается в единицах измеряемой величины. Ti – измеренное абсолютное значение сигнала. Ti-1 – предыдущее абсолютное значение сигнала.
Если Ti > Ti-1 ± FiL.b, то Ti присваивается значение Ti-1 ± FiL.b (в зависимости от движения значения вверх или вниз) и FiL.b = 2 * FiL.b (значение полосы фильтра удваивается).
Если значение Ti < Ti-1 ± FiL.b, то значение FiL.b возвращается на первоначальное.
Малая ширина полосы фильтра приводит к замедлению реакции на быстрое изменение входной величины. При низком уровне помех или при работе с быстро меняющимися процессами рекомендуется увеличить значение параметра FiL.b или отключить действие полосы фильтра, установив значение FiL.b = OFF. В случае высокого уровня помех следует уменьшить значение параметра для устранения их влияния на работу прибора. |
DeltaSens** | |||
FiL.t | OFF | 10 | Постоянная времени фильтра (tф). Интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения Ti. Значение сигнала рассчитывается по формуле: Ti = Ti-tф + (Ti – Ti-tф) * 0,63.
Уменьшение значения FiL.t приводит к ускорению реакции на скачкообразные изменения температуры, но снижает помехозащищенность. Увеличение FiL.t повышает инерционность и подавляет шумы. |
1...999 | |||
dPt | 0 | 1 | Положение десятичной точки. Количество знаков после запятой, которое будет выводиться на ЦИ. Значение AutO – положение точки автоматически выбирается для отображения максимального возможного количества разрядов. Если значение не может быть отображено на ЦИ, то на ЦИ будут выведены сообщения об ошибках Hi или Lo. |
1 | |||
2 | |||
3 | |||
AutO | |||
ind.L | –1999...9999 | 0.0 | Параметры для приведения индикации измеренных значений тока и напряжения к значению физической величины. Параметры настраиваются для сигналов 0...5 мА, 0...20 мА, 4...20 мА, –50...+50 мВ, 0...1 В. Для других типов датчиков данные параметры скрыты.
ind.L – индикация при минимальном значении сигнала (0 мА, 4 мА, –50 мВ, 0 В). ind.H – индикация при максимальном значении сигнала (5 мА, 20 мА, 50 мВ, 1 В).
Все остальные промежуточные значения индикации располагаются линейно и высчитываются прибором по формуле: T = ind.L + IX * (ind.H – ind.L),
где IX – значение сигнала с датчика в относительных единицах диапазона от 0,000 до 1,000.
Пример. Используется датчик с выходным током 4…20 мА, контролирующий давление в диапазоне 0…25 атм. В параметре ind.L задается значение 0.00, а в параметре ind.H значение 25.00. Теперь значения будут отображаться в атмосферах. |
ind.H | –1999...9999 | 100.0 | |
| FunC | oFF | Математические функции | |
OFF | oFF – математические функции не используются | ||
SQrt | SQrt – вычисление квадратного корня из текущего значения:
| ||
SuM | SuM – взвешенная сумма значений двух каналов:
Если CF1 и CF2 > 1, то расчет формул SuM, diFF, ASuM и SQSM производится отдельно для каждого канала. | ||
diFF | diFF – взвешенная разность значений двух каналов:
| ||
ASuM | ASuM – средневзвешенная сумма значений двух каналов:
| ||
SQSM | SQSM – квадратный корень из средневзвешенной суммы значений двух каналов:
где T – результат вычисления функции; CF.1 и CF.2 – дополнительные коэффициенты для расчета значений, которые вводятся в настройках прибора; T1 и T2 – сигналы на входах 1 и 2 соответственно | ||
CF.1 | –100.0...100.0 | 1.0 | Коэффициенты для расчета значений по математическим функциям. Параметры доступны, если в параметре FunC установлено одно из следующих значений: SuM, diFF, ASuM и SQSM |
CF.2 | –100.0...100.0 | 1.0 | |
Corr* | Подменю | ||
Cor.1* Cor.2* Cor.3* | OFF SensMin... SensMax** | OFF | Параметры коррекции графика измерителя. Используются для компенсации погрешности подключенных датчиков или компенсации сопротивления проводов (для подключения ТС по двухпроводной схеме), когда есть возможность определить с помощью дополнительного оборудования точное значение измеренного сигнала, тем самым скорректировать показания прибора. Методика коррекции приведена в разделе. |
din.t | 0...30 | 10 | Параметры функции отслеживания динамики изменения входного сигнала. din.t – период анализа динамики изменения сигнала. din.d – дельта динамики сигнала.
За заданный период (din.t) анализируется динамика изменения сигнала. Прибор вычитает из текущего измеренного значения предыдущее и добавляет разницу к накопительному буферу. После накопления буфера за период din.t производится сравнение его содержимого со значением дельты динамики сигнала din.d по модулю. Буфер скользящий, т. е. в последующую секунду появляется новое значение, а последнее значение исключается из буфера. Затем динамика перерасчитывается. Если текущее значение буфера меньше din.d, то динамика сигнала определяется как «без изменений». Если текущее значение буфера больше din.d, то динамика определяется по знаку буфера (положительное значение – возрастает, отрицательное – убывает). При выборе параметра din1 или din2 (для 1-го или 2-го входа соответственно) в параметре SCrX (меню ind) на нижнем индикаторе будет отображаться динамика измеряемой величины на соответствующем входе. |
din.d | 0.2...DeltaSens** | 0.2 | |
bArr | OFF | OFF | Подключение барьера искрозащиты. Параметр bArr доступен только для датчиков типа ТС. Для работы с ТС, подключенными через барьер искрозащиты, следует присвоить значение On. Диапазон измерений входного сопротивления будет расширен, чтобы скомпенсировать проходное сопротивление барьера искрозащиты. Для сохранения точности измерений рекомендуется выполнить процедуру корректировки в соответствии с компенсацией сопротивления соединительных проводов для трехпроводной линии. При bArr = On дополнительная приведенная погрешность составляет не более 0.5 %. Величина дополнительной приведенной погрешности определяется типом и характеристиками используемого барьера искрозащиты. |
On | |||
* Положение десятичной точки определяется параметром dPt. ** SensMin – нижняя граница измерения датчика, SensMax – верхняя граница измерения датчика, DeltaSens – диапазон измерения датчика. | |||
Настройка ВУ1
Настройка дискретного ВУ1
Параметры ВУ дискретного типа (меню Out1) представлены в таблице.
Параметры ВУ дискретного типа
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
| (1) | (2) | ||
| LOG.d | Тип логики работы ЛУ | ||
OFF | H.PID | Регулятор отключен. ВУ в безопасном состоянии | |
H.Pid | ПИД-регулятор «нагреватель» 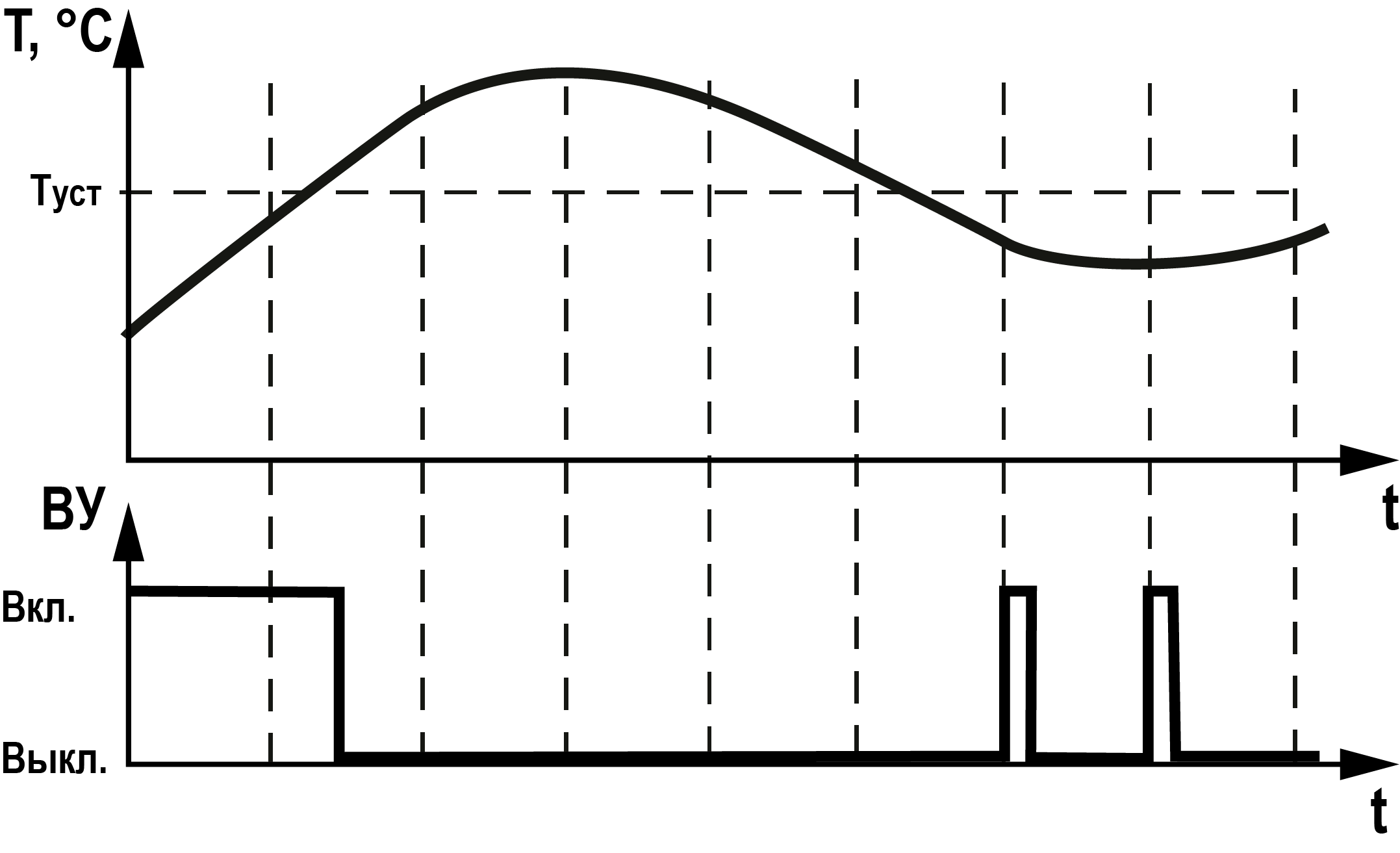 | ||
C.Pid | ПИД-регулятор «холодильник» 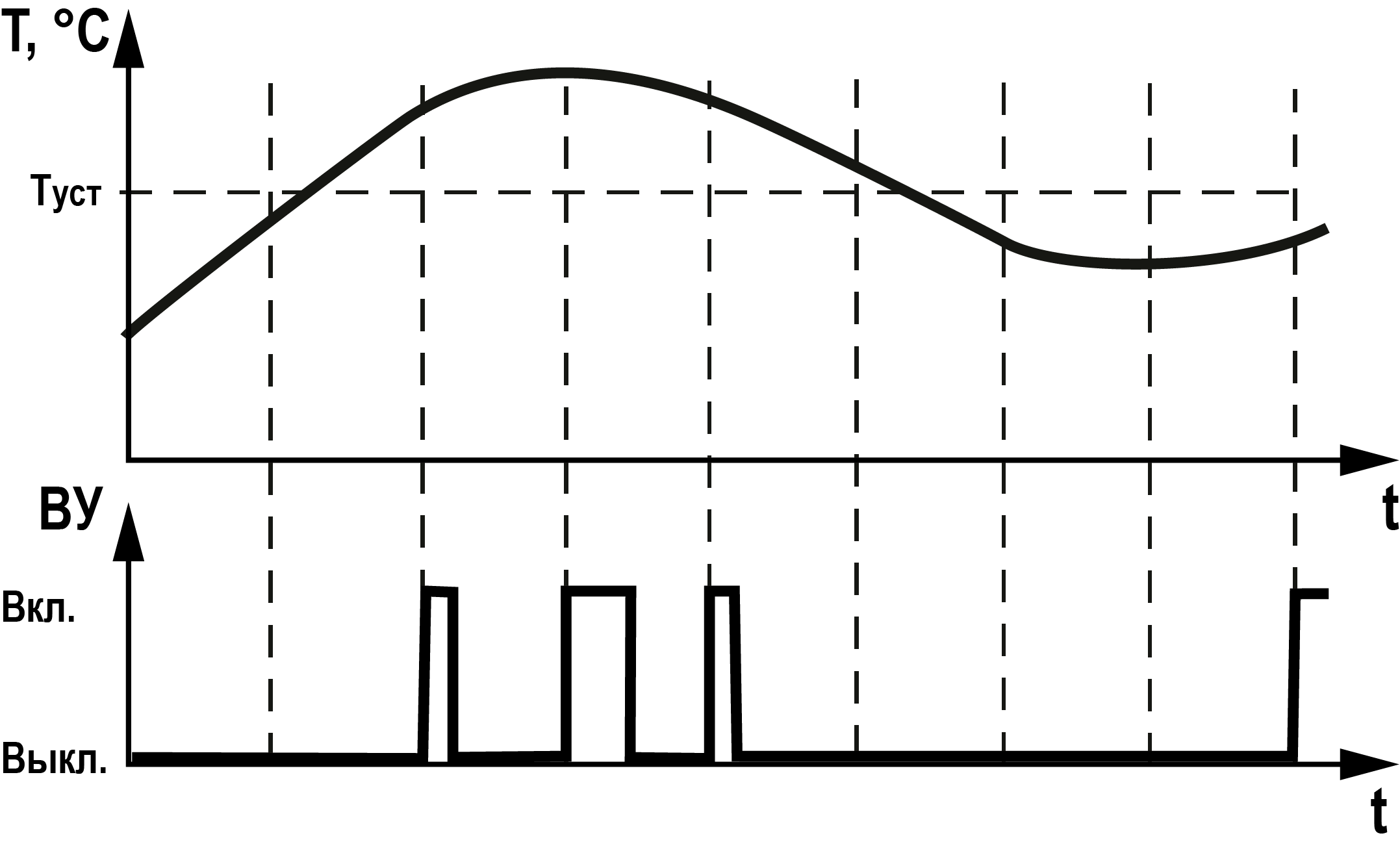 | ||
SP* | SP.LO... SP.Hi | 30.0 | Уставка регулятора. Требуемое значение регулируемой величины, которое должен поддерживать регулятор. Положение десятичной точки определяется параметром dPt. |
SP.LO* | SensMin**...SP.Hi | –199.9 | Нижняя и верхняя границы для выбора диапазона значений параметра уставки (SP). Границы задаются в размерности параметра уставки. При изменении параметров SP.Lo и SP.Hi их значения ограничиваются диапазоном измерения текущего датчика на соответствующем входе Не меняются при смене типа датчика |
SP.Hi* | SP.LO...SensMax** | 999.9 | |
Pid.P | 0,001...9999 | 10.0 | Полоса пропорциональности ПИД-регулятора. Значения устанавливаются в единицах измерения с учетом положения десятичной точки. |
Pid.I | 0...3999 с | 10.0 | Интегральная постоянная ПИД-регулятора. Если установлено значение 0, то в регуляторе отключается действие интегральной составляющей. |
Pid.d | 0...3999 с | 10.0 | Дифференциальная постоянная ПИД-регулятора |
VSP* | OFF...DeltaSens** | OFF | Скорость изменения уставки ПИД-регулятора. Скорость изменения уставки используется для сглаживания перехода с текущего значения уставки на заданное. При изменении уставки ПИД-регулятор должен использовать уставку по формуле: SPтекущ = SPпред + vSP в течение минуты. Где SPтекущ – текущее значение уставки, SPпред – предыдущее значение уставки. Увеличение (уменьшение) уставки происходит до тех пор, пока SPтекущ не станет равной SP При включении прибора или переходе из режима Стоп или ручного регулирования в режим автоматического регулирования в качестве начального значения SPпред используется текущее значение на входе 1. Значение OFF – нет ограничения по скорости |
d.bnd* | 0...DeltaSens** | 0 | Зона нечувствительности ПИД-регулятора. Значения задаются в единицах измерения с учетом положения десятичной точки. Если измеренный сигнал находится внутри диапазона SP ± d.bnd, то ПИД-регулятор не будет изменять выходную мощность до тех пор, пока регулируемая величина не выйдет из этой зоны |
db.d | 0.02...9.99 с | 0.02 | Минимальный ход задвижки (для дискретного ВУ) В режиме ручного регулирования значение db.d игнорируется при управлении задвижками. Выходной сигнал подается на исполнительный механизм тогда, когда рассчитанная длительность импульса включения(выключения) больше или равна db.d. Не выданные воздействия накапливаются до достижения db.d. Параметр относится как ко времени включения, так и ко времени выключения ВУ. В режиме ручного регулирования нельзя выдать управляющее
воздействие меньше, чем db.d. |
Err.V | ON | OFF | Состояние дискретной задвижки при возникновении аварии. ON – Открыта. OFF – Закрыта. При возникновении аварии прибор включает управление задвижкой в зависимости от параметра Err.V на открытие или закрытие. Действие ВУ на задвижку постоянное вне зависимости от времени хода или показаний датчика положения (в т.ч. после перезагрузки прибора). Состояние ВУ сбрасывается в 0 только после устранения неисправности. |
OFF | |||
StP.V | ON | 0.0 | Состояние дискретной задвижки в режиме Стоп. ON – Открыта. OFF – закрыта. При переводе в режим Стоп прибор включает управление задвижкой в зависимости от параметра Stp.V на открытие или закрытие. Действие ВУ на задвижку постоянное вне зависимости от времени хода или показаний датчика положения (в т.ч. после перезагрузки прибора). Состояние ВУ сбрасывается в 0 только при переводе прибора в режим ручного регулирования или автоматического регулирования. |
OFF | |||
LbA.t | OFF | OFF | Функция диагностики обрыва контура регулирования. Описание работы функции см. раздел. LbA.t – время диагностики обрыва контура. При значении LbA.t = OFF функция диагностики обрыва контура регулирования выключена. LbA.b – ширина зоны диагностики обрыва контура. Параметр появляется, если LbA.t отлично от OFF |
1...9999 с | |||
LbA.b* | 0...DeltaSens** | 10 | |
A.rEC | OFF | OFF | Автоматическое восстановление процесса регулирования после ошибки на соответствующем входе. Если в режиме автоматического регулирования произошла аварийная остановка по причине обрыва датчика или выхода показаний за диапазон измерения, то при восстановлении измерения процесс регулирования автоматически запускается через A.rEC секунд. Если A.rEC = OFF, то чтобы восстановить режим автоматического регулирования следует:
Автоматическое восстановление процесса регулирования не распространяется на обрыв контура регулирования. Обрыв контура регулирования требует ручного восстановления. |
1...999 с | |||
bLC.P | OFF | OFF | Блокировка работы регулятора (ЛУ1) при обрыве датчика положения (на входе 2). OFF – не блокировать регулятор. ON – блокировать регулятор. Автоматическое восстановление регулирования в соответствии с параметром A.rEC. Параметр отображается, если параметр tYPE (меню in2)= PoS.r или PoS.I |
| ON | |||
* Положение десятичной точки определяется параметром dPt. ** SensMin – нижняя граница измерения датчика, SensMax – верхняя граница измерения датчика, DeltaSens – диапазон измерения датчика. | |||
Настройка аналогового ВУ1
Параметры ВУ аналогового типа (Out1) представлены в таблице.
Параметры ВУ аналогового типа
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
| (1) | (2) | ||
LOG.A | Тип логики работы ЛУ | ||
OFF | H.Pid | Регулятор отключен | |
H.Pid | ПИД-регулятор «нагреватель» | ||
C.Pid | ПИД-регулятор «холодильник» | ||
SP* | SP.Lo...SP.Hi | 30.0 | Уставка регулятора. Требуемое значение регулируемой величины, которое должен поддерживать регулятор. Положение десятичной точки определяется параметром dPt. |
SP.Lo* | SensMin**...SP.HI | –199.9 | Нижняя и верхняя границы для выбора диапазона значений параметра уставки (SP). Границы задаются в размерности параметра уставки. При смене типа датчика значения могут измениться согласно его диапазону Не меняются при смене типа датчика |
SP.Hi* | SP.Lo...SensMax** | 999.9 | |
Pid.P | 0.001...9999 | 10.0 | Полоса пропорциональности ПИД-регулятора. Значения устанавливаются в единицах измерения с учетом положения десятичной точки. |
Pid.I | 0..3999 с | 10.0 | Интегральная постоянная ПИД-регулятора. Если установлено значение 0, то в регуляторе отключается действие интегральной составляющей. |
Pid.d | 0..3999 с | 10.0 | Дифференциальная постоянная ПИД-регулятора |
VSP* | OFF...DeltaSens** | OFF | Скорость изменения уставки ПИД-регулятора. Скорость изменения уставки используется для сглаживания перехода с текущего значения уставки на заданное. При изменении уставки ПИД-регулятор должен использовать уставку по формуле: SPтекущ = SPпред + vSP в течение минуты. Где SPтекущ – текущее значение уставки, SPпред – предыдущее значение уставки. Увеличение (уменьшение) уставки происходит до тех пор, пока SPтекущ не станет равной SP. При включении прибора или переходе из режима Стоп или ручного регулирования в режим автоматического регулирования в качестве начального значения SPпред используется текущее значение на входе 1. Значение OFF – нет ограничения по скорости |
d.bnd* | 0...DeltaSens** | 0 | Зона нечувствительности ПИД-регулятора. Значения задаются в единицах измерения с учетом положения десятичной точки. Если измеренный сигнал находится внутри диапазона SP ± d.bnd/2, то ПИД-регулятор не будет изменять выходную мощность до тех пор, пока регулируемая величина не выйдет из этой зоны |
db.A | 0...100% | 0.0 | Минимальное изменение аналогового ВУ или Минимальный ход задвижки (для аналогового ВУ) В режиме ручного регулирования значение db.A игнорируется при управлении задвижками. Минимальная степень открытия задвижки. Значение от 0 до 100% от диапазона выходного сигнала 4...20 мА или 0...10В. Выходной сигнал на исполнительный механизм не меняется тогда, когда рассчитанная величина изменения меньше db.A. Не выданные воздействия накапливаются до достижения db.A. В режиме ручного регулирования нельзя выдать управляющее воздействие
меньше, чем db.A |
oL.L | 0...100.0 | 0.0 | Минимальная выходная мощность (нижний предел) ПИД-регулятора. Значения в % от 0 до oL.H. |
oL.H | 0...250 с | 100.0 | Максимальная выходная мощность (верхний предел) ПИД-регулятора. Значения в % от oL.L до 100. |
oL.V | 0.2..100 %/c | 100.0 | Максимальная скорость изменения выходной мощности ПИД-регулятора. На данную величину может изменяться значение Out.P за 1 секунду. |
Err.P | 0…100 % | 0.0 | Значение ВУ1 в режиме Авария в случае использования ПИД-регулятора |
StP.P | 0…100 % | 0.0 | Значение ВУ1 в режиме Стоп в случае использования ПИД-регулятора |
LbA.t | oFF | oFF | Функция диагностики обрыва контура регулирования. Описание работы функции см. разделе. LbA.t – время диагностики обрыва контура. При значении LbA.t = OFF функция диагностики обрыва контура регулирования выключена. LbA.b – ширина зоны диагностики обрыва контура. Параметр появляется, если LbA.t отлично от OFF |
1...9999 c | |||
LbA.b* | 0.0...999.9 | 10 | |
Hi | |||
A.rEC | OFF...999 c | OFF | Автоматическое восстановление процесса регулирования после ошибки на соответствующем входе. Если в режиме автоматического регулирования произошла аварийная остановка по причине обрыва датчика или выхода показаний за диапазон измерения, то при восстановлении измерения процесс регулирования автоматически запускается через A.rEC секунд. Если A.rEC = OFF, то чтобы восстановить режим автоматического регулирования следует:
Автоматическое восстановление процесса регулирования не распространяется на обрыв контура регулирования. Обрыв контура регулирования требует ручного восстановления |
* Положение десятичной точки определяется параметром dPt. ** SensMin – нижняя граница измерения датчика, SensMax – верхняя граница измерения датчика, DeltaSens – диапазон измерения датчика. | |||
Настройка ВУ2
Настройка дискретного ВУ2
Параметры ВУ дискретного типа (меню Out2) представлены в таблице.
Параметры ВУ дискретного типа
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
| (1) | (2) | ||
| LOG.d | Тип логики работы ЛУ | ||
OFF | OFF | Регулятор отключен. ВУ в безопасном состоянии | |
ALrM | Сигнализатор. Тип логики срабатывания сигнализатора задается в параметре A.tYP. Сигнализатор продолжает работать в режиме Стоп и режиме ручного регулирования. Переход в состояние установленное в параметре Err.d при ошибке на Входе 1, Входе 2 (если GraF не oFF) и Выходе 1 Сигнализатор восстанавливается при исчезновении ошибки на входе. | ||
A.tYP | SP.U | Тип логики срабатывания сигнализатора | |
OFF | Сигнализатор выключен | ||
SP.П | Сигнализатор включается, когда измеренное значение находится в диапазоне SP ± A.bnd с учетом параметра A.HYS. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора.  | ||
SP.u | Сигнализатор включается, когда измеренное значение находится вне диапазона SP ± A.bnd с учетом параметра A.HYS. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. 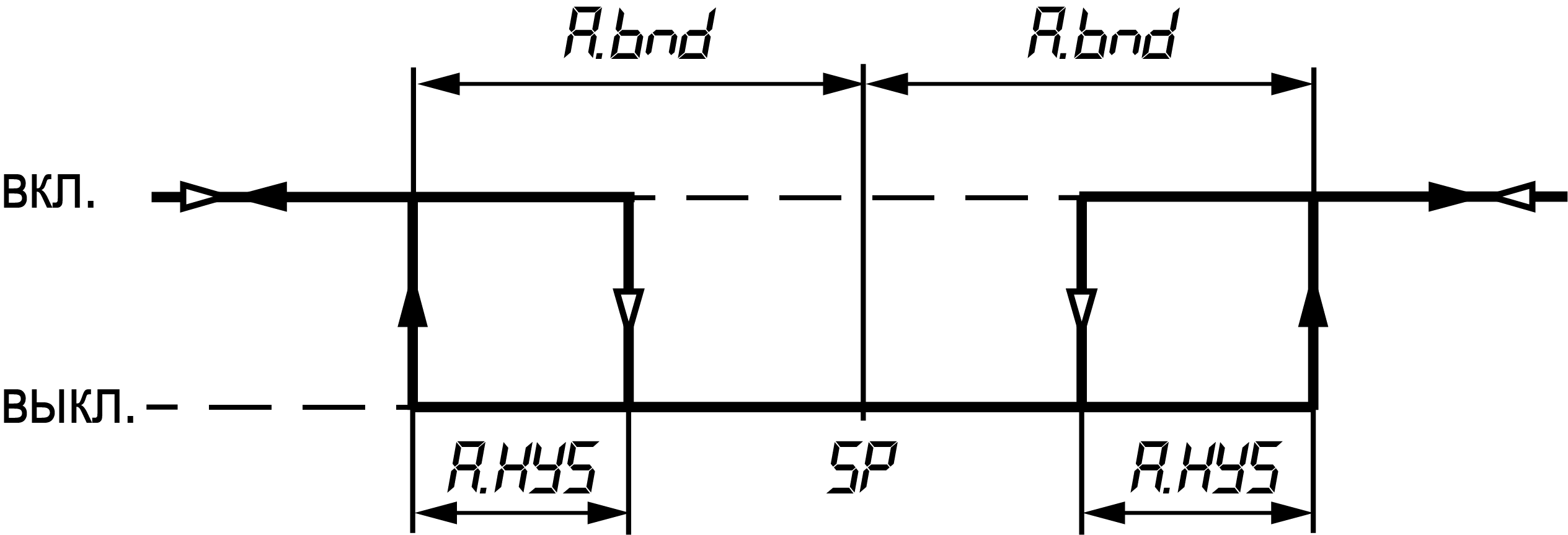 | ||
SP.Hi | Сигнализатор включается, когда измеренное значение превышает SP на величину A.bnd. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. 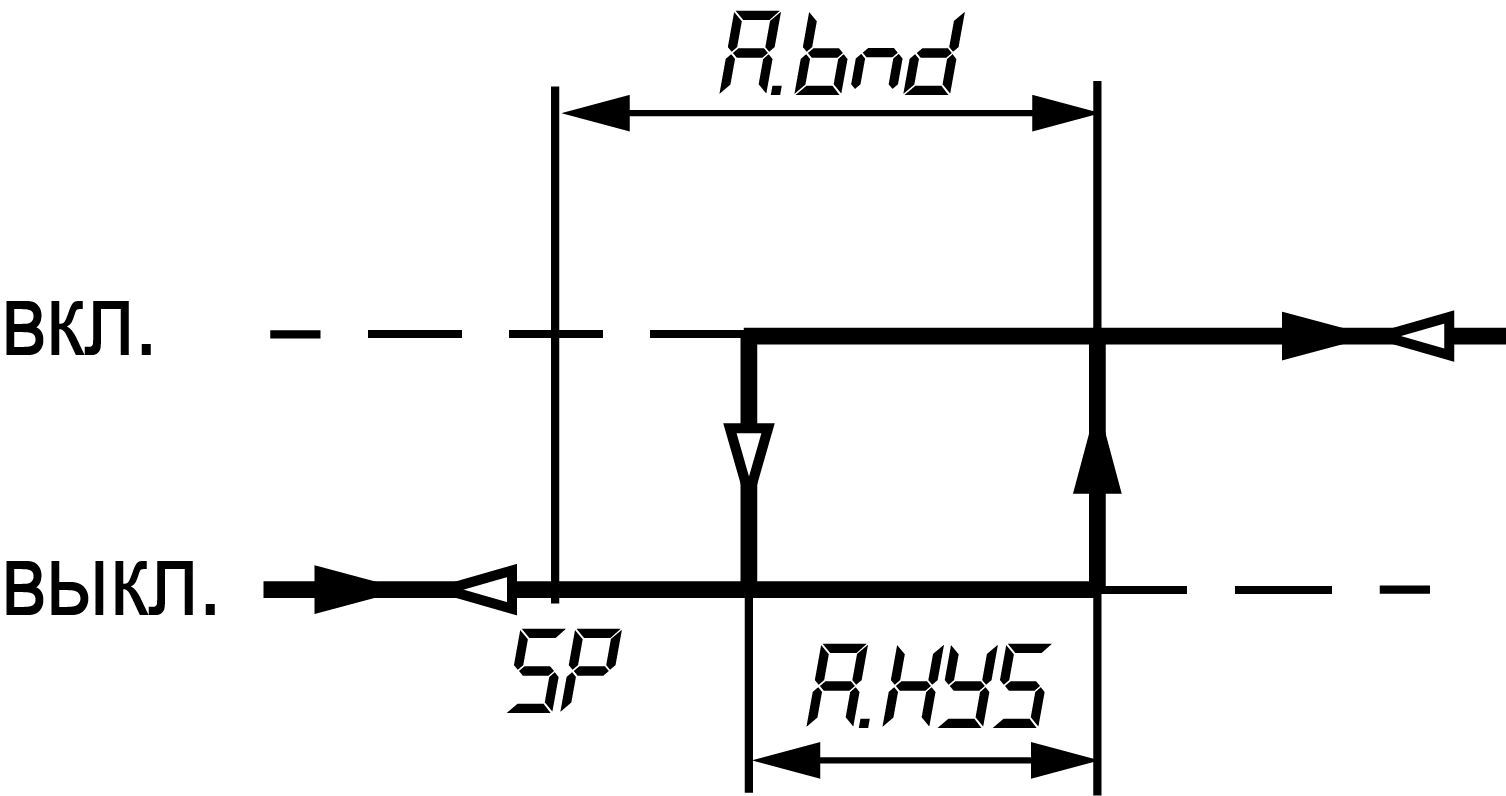 | ||
SP.Lo | Сигнализатор включается, когда измеренное значение ниже SP на величину A.bnd. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. 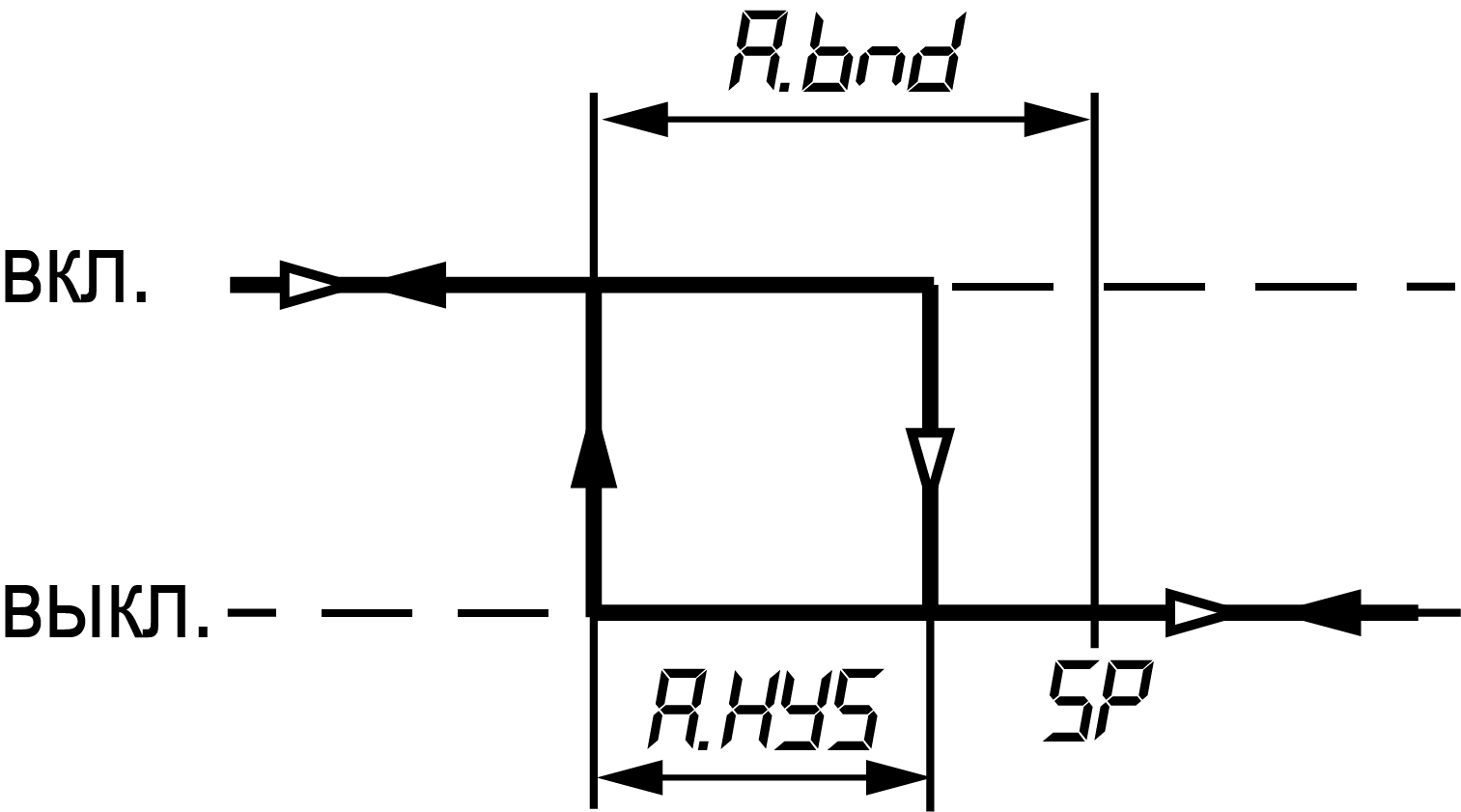 | ||
0.П | Сигнализатор включается, когда измеренное значение находится в диапазоне 0 ± A.bnd с учетом параметра A.HYS. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. 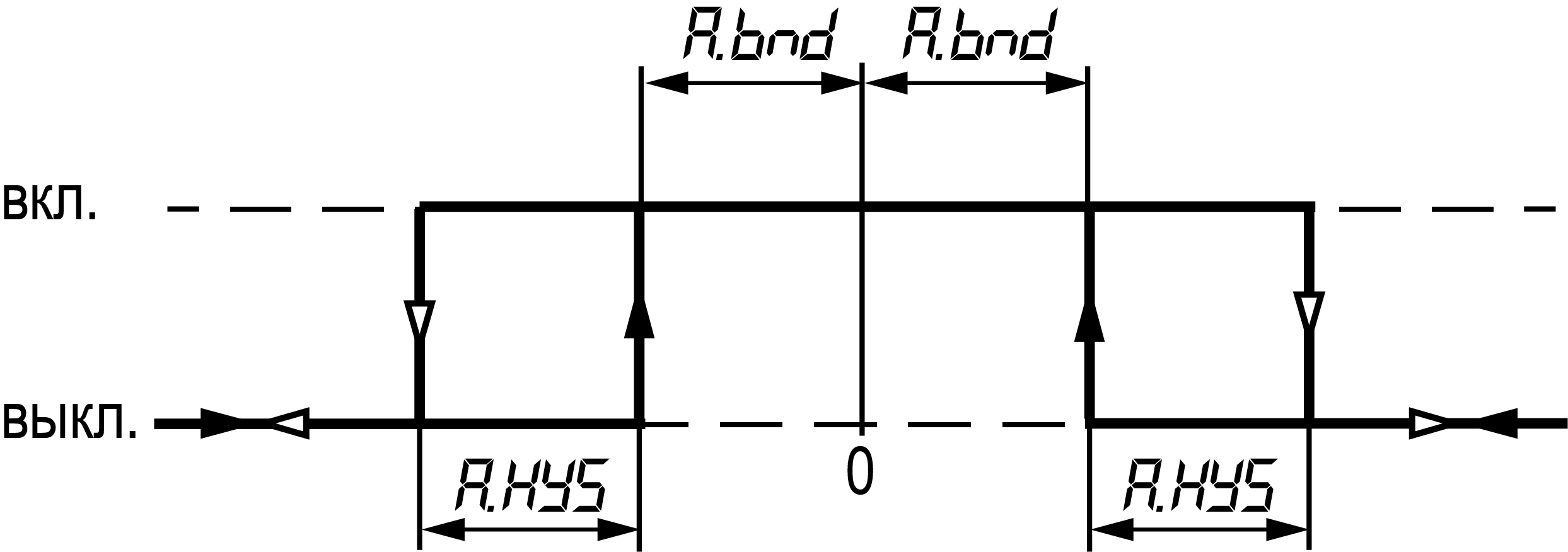 | ||
0.u | Сигнализатор включается, когда измеренное значение находится вне диапазона 0 ± A.bnd с учетом параметра A.HYS. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. 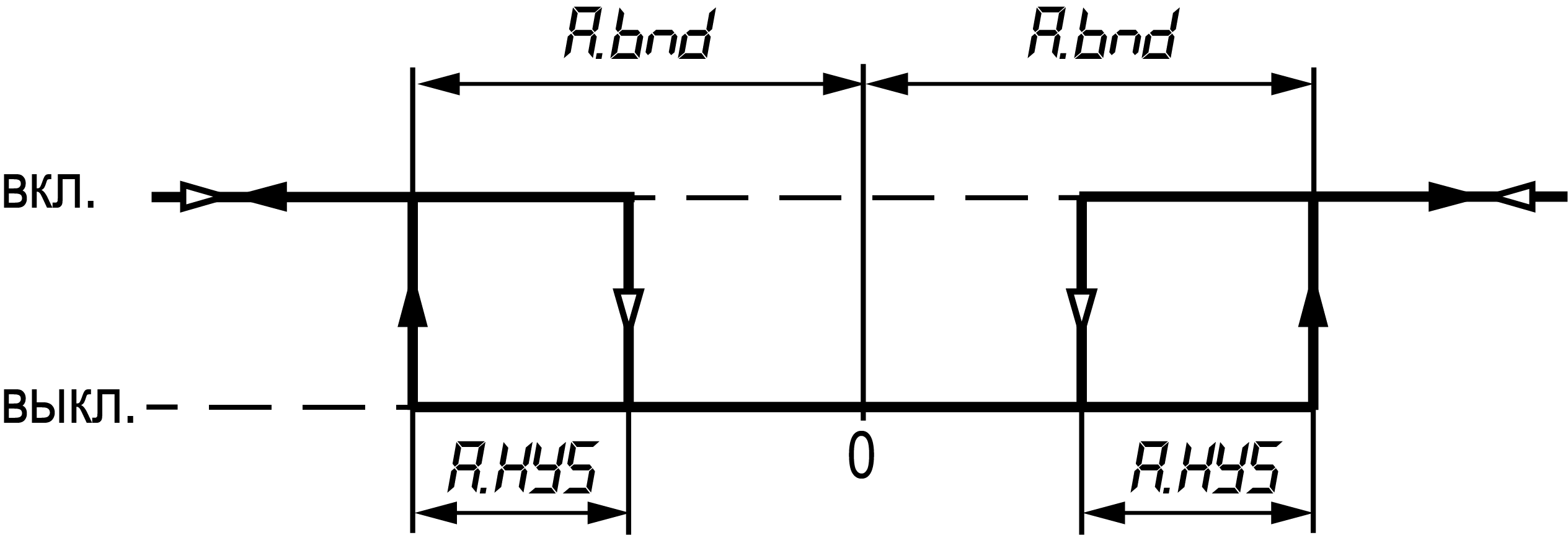 | ||
0.Hi | Сигнализатор включается, когда измеренное значение превышает ноль на величину A.bnd. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. 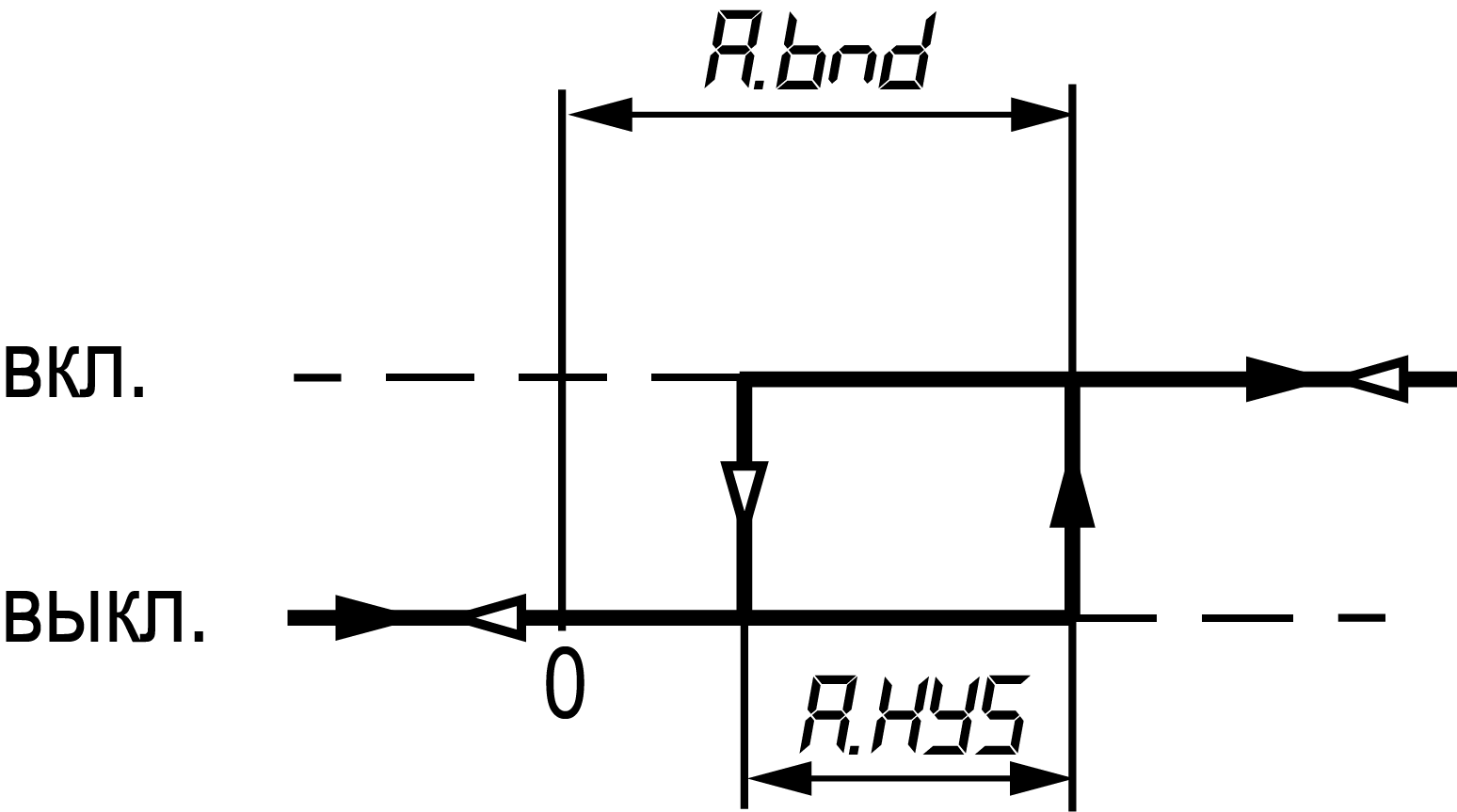 | ||
0.LO | Сигнализатор выключается, когда измеренное значение превышает ноль на величину A.bnd. Параметр A.bnd – порог срабатывания сигнализатора. Параметр A.HYS – гистерезис срабатывания сигнализатора. 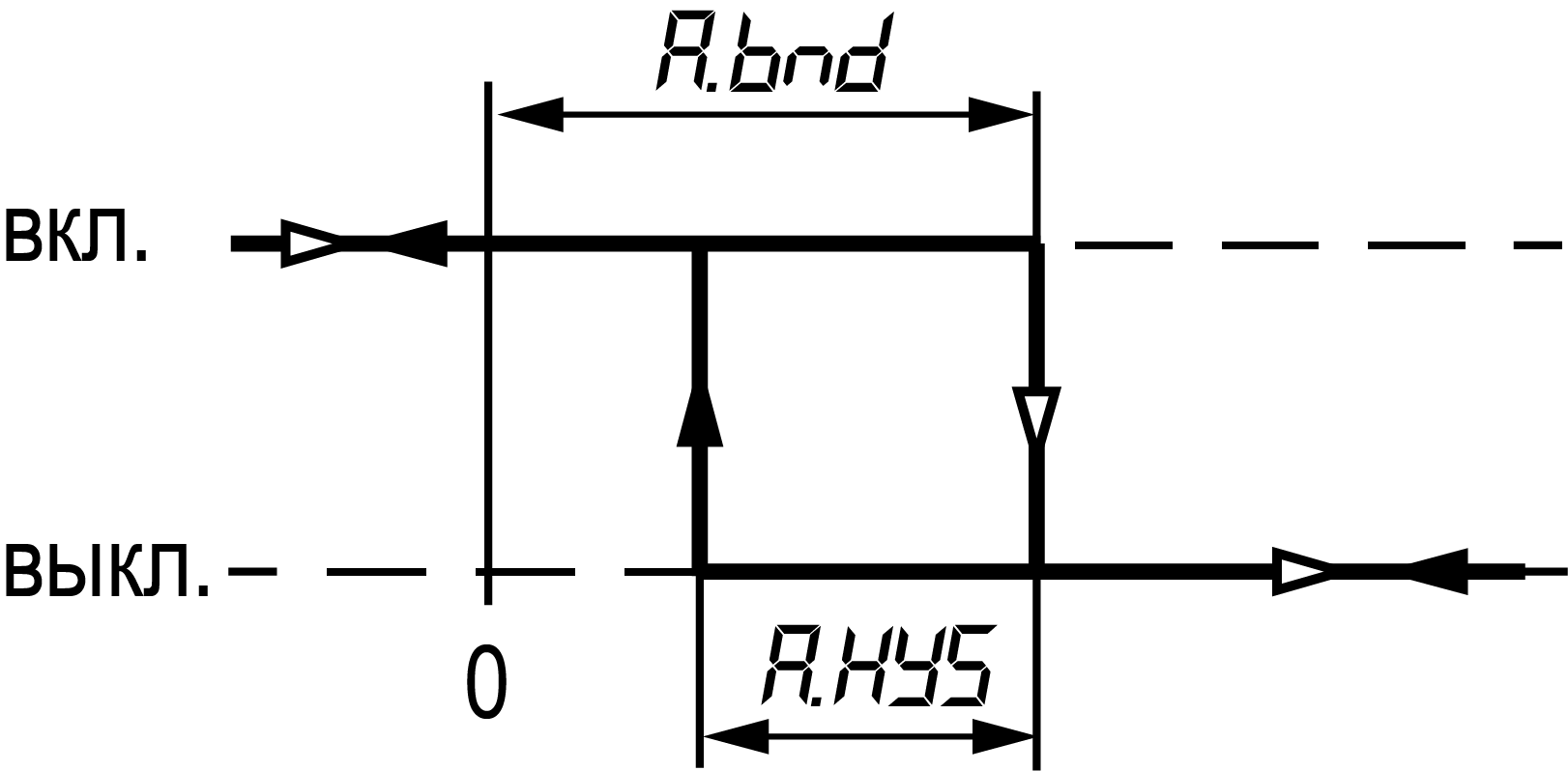 | ||
A.bnd* | 0...DeltaSens** | 20 | Порог срабатывания сигнализатора |
A.HYS* | 0...DeltaSens** | 1.0 | Гистерезис срабатывания сигнализатора |
F.bLC | ON | OFF | Блокировка первого срабатывания сигнализатора. ON – блокируется. OFF – не блокируется. Блокировка служит для предотвращения
срабатывания сигнализатора при включении прибора до выхода системы
управления на заданный режим работы. Если после включения прибора
значение измеренного сигнала на входе находится вне аварийной зоны,
то блокировка 1-го срабатывания сбрасывается. Флаг обнуляется при переходе из режима Стоп в режим автоматического регулирования. |
OFF | |||
Err.d | OFF | OFF | Состояние ВУ в режиме Авария. ON – включен. OFF – выключен |
On | |||
* Положение десятичной точки определяется параметром dPt. ** SensMin – нижняя граница измерения датчика, SensMax – верхняя граница измерения датчика, DeltaSens – диапазон измерения датчика. | |||
Настройка аналогового ВУ2
Параметры ВУ аналогового типа (Out2) представлены в таблице.
Параметры ВУ аналогового типа
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
| (1) | (2) | ||
| LOG.A | Тип логики работы ЛУ | ||
OFF | OFF | Регулятор отключен | |
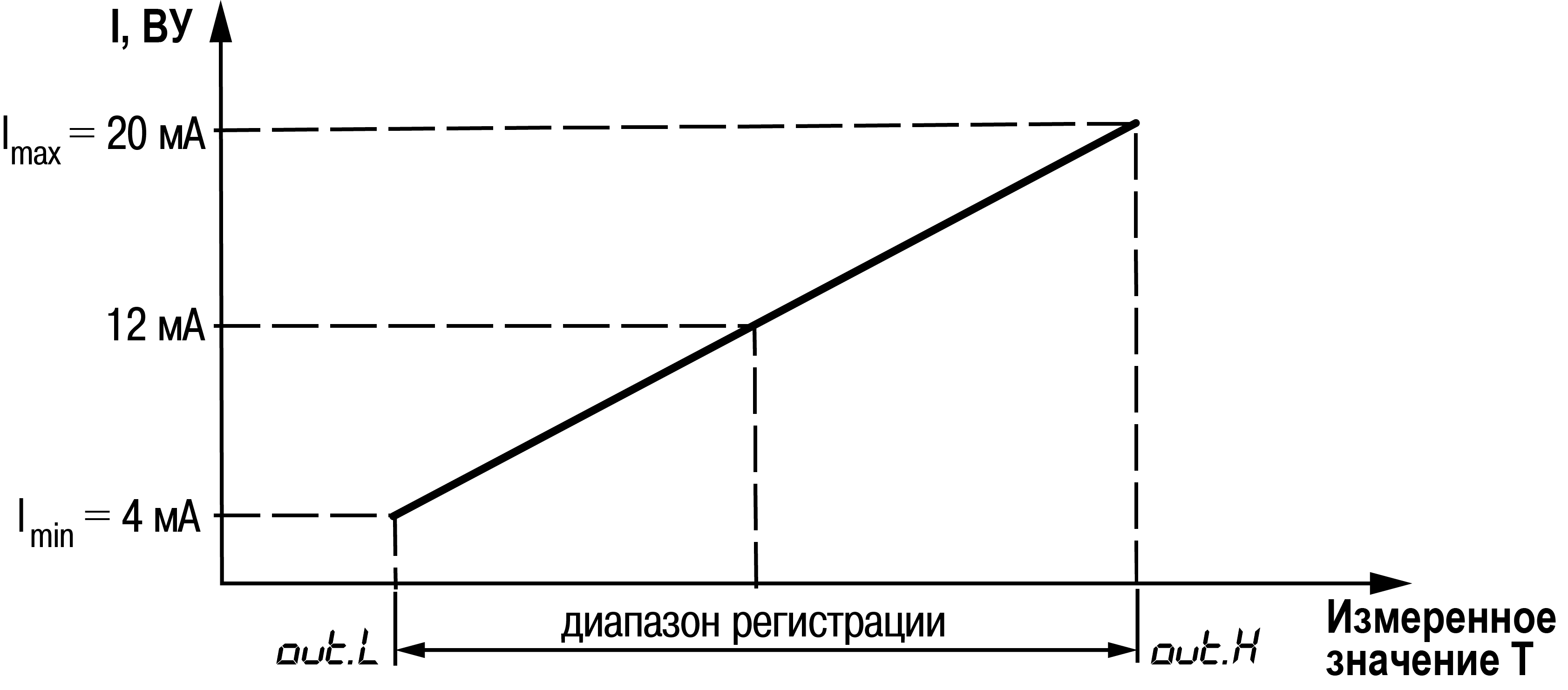
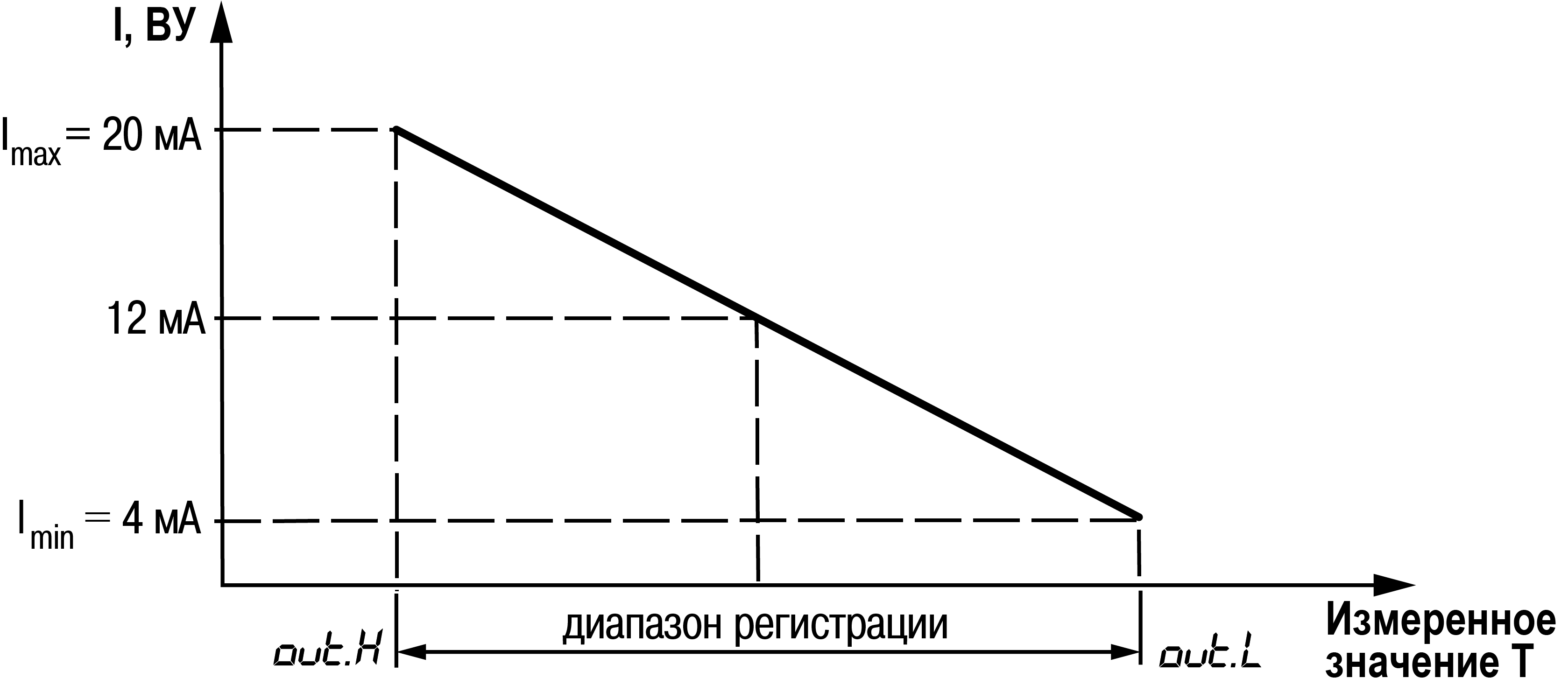
ConV | Регистратор. Формирование на ВУ аналогового сигнала в виде тока 4...20 мА (для выхода типа «И») или напряжения 0..10 В (для выхода типа «У») в зависимости от измеренного значения входного сигнала. Промежуточные значения формируются по линейной функции. Для ТС, ТП данные формируются по НСХ. Примеры формирования прямой и обратной зависимости выходного сигнала регистрации от измеренного значения для выходного сигнала 4...20 мА:
При аварии ВУ принимает значение Err.A. Отсутствует режим Стоп | ||
Out.L | SensMin...SensMax* | 0.0 | Нижняя граница регистрации. Параметр задается для типа логики ЛУ «регистратор» (LOG.A = ConV). Нижняя граница регистрации задается в единицах измерения входа |
Out.H | SensMin...SensMax* | 100.0 | Верхняя граница регистрации. Параметр задается для типа логики ЛУ «регистратор» (LOG.A = ConV). Верхняя граница регистрации задается в единицах измерения входа |
Err.A | HI | LO | Безопасное состояние выхода в режиме Авария. Hi – 20 мА/10 В, LO – 4 мА/0 В |
LO | |||
* SensMin – нижняя граница измерения датчика, SensMax – верхняя граница измерения датчика, DeltaSens – диапазон измерения датчика. | |||
Диагностика неисправности контура регулирования
Логика отслеживания LBA аварии для задвижек с аналоговым управлением
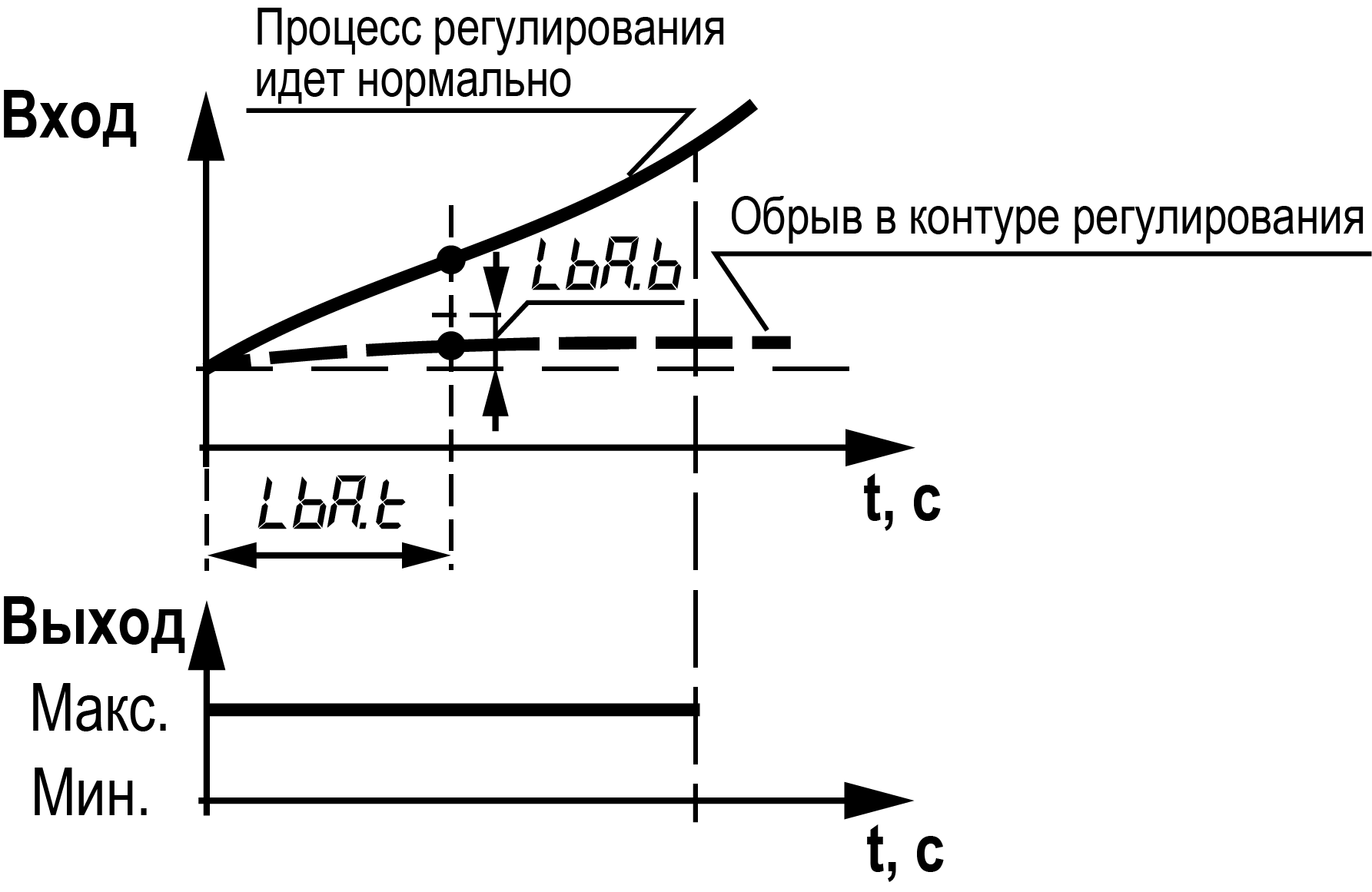
Диагностика неисправности контура регулирования применяется для логики «нагреватель» или «холодильник». Прибор отслеживает реакцию системы на управляющее воздействие:
для «нагревателя», при максимальном значение аналогового ВУ, показания входа увеличиваются. При минимальном значении – уменьшаются;
для «холодильника», при максимальном значение аналогового ВУ, показания входа уменьшаются. При минимальном значении – увеличиваются.
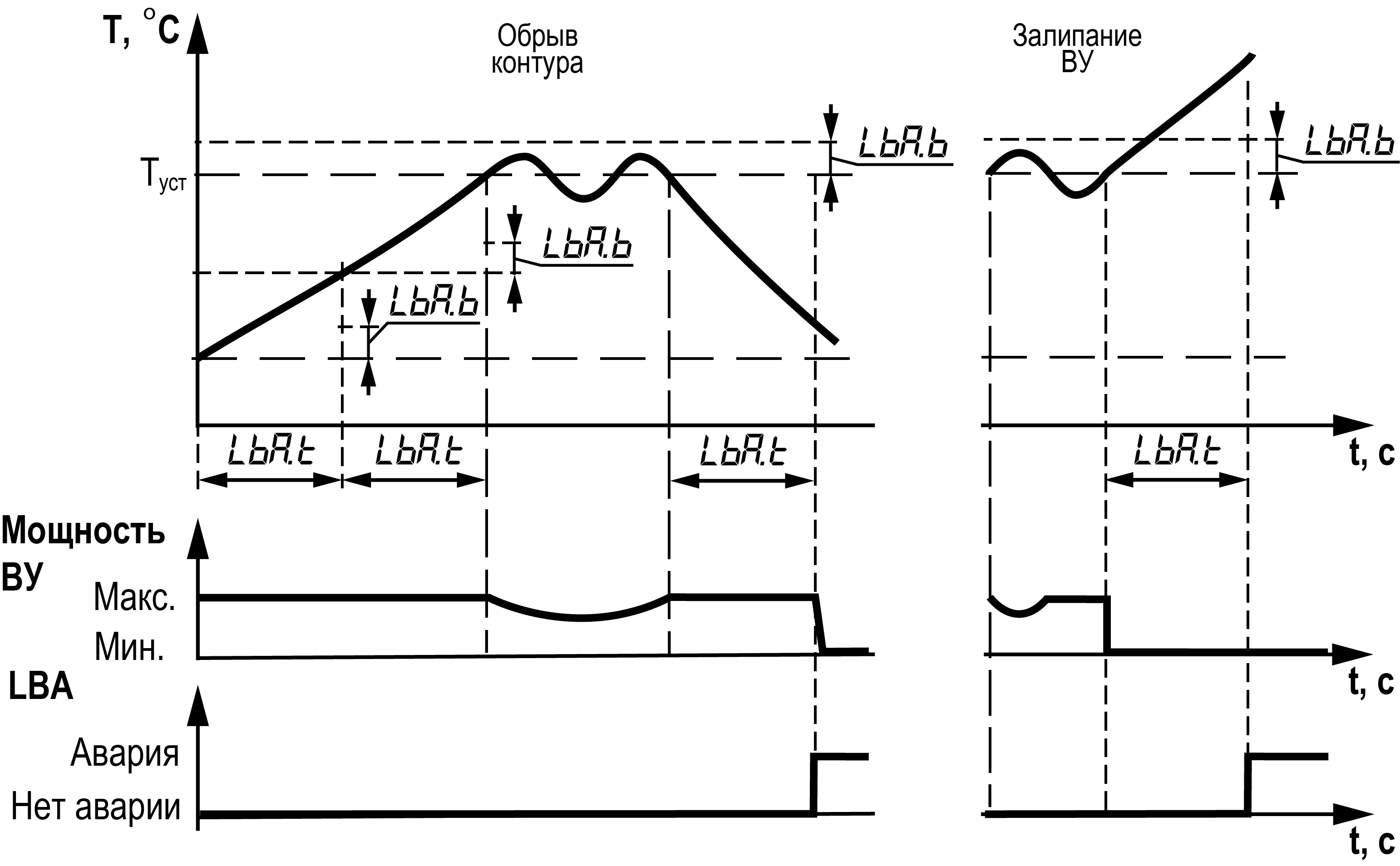
После достижения максимальной выходной мощности включается таймер LbA.t. Если за время LbA. t значение входа изменяется на значение, большее LbA. b, то таймер LbA. t сбрасывается. Если нет, то регистрируется авария по неисправности контура регулирования. Начинает мигать светодиод СТ1, а также происходит остановка прибора и переход выхода в безопасное состояние в соответствии с параметром Err. A (для аналогового ВУ).
Принцип работы
Для «нагревателя»:
если выходная мощность максимальная - прибор фиксирует значение на входе. Если за время LbA.t на входе сигнал не изменится на величину LbA.b или более, то прибор фиксирует неисправность контура регулирования;
если выходная мощность минимальному - прибор фиксирует значение на входе. Если за время LbA.t на входе сигнал не изменится на величину LbA.b или более, то прибор фиксирует неисправность контура регулирования.
Для «холодильника»:
если выходная мощность максимальная - прибор фиксирует значение на входе. Если за время LbA.t на входе сигнал не изменится на величину LbA.b или более, то прибор фиксирует неисправность контура регулирования;
если выходная мощность минимальному - прибор фиксирует значение на входе. Если за время LbA.t на входе сигнал не изменится на величину LbA.b или более, то прибор фиксирует неисправность контура регулирования.
Если в течение LbA. t значение выходной мощности меняется, то таймер сбрасывается каждый раз, когда происходит это изменение или значение становится промежуточным между минимумом и максимумом. Если значение входного сигнала изменилось на LbA.b раньше, чем сработал таймер LbA.t, то прибор фиксирует новое значение входа в этот момент и обнуляет таймер LbA. t (если выходная мощность все это время максимальная).
Рекомендации по настройке
Для первоначального подбора значения времени диагностики обрыва контура (LbA.t) следует:
Установить выходной сигнал на максимальный уровень.
Измерить время, за которое измеряемая величина изменится на ширину зоны диагностики обрыва контура (параметр LbA.b).
Увеличить измеренное время вдвое и принять его за время диагностики обрыва контура.
После устранения причин аварии процесс автоматического регулирования следует возобновить вручную. Для этого следует перевести прибор в режим Стоп или режим ручного регулирования, а затем перевести в режим автоматического регулирования.
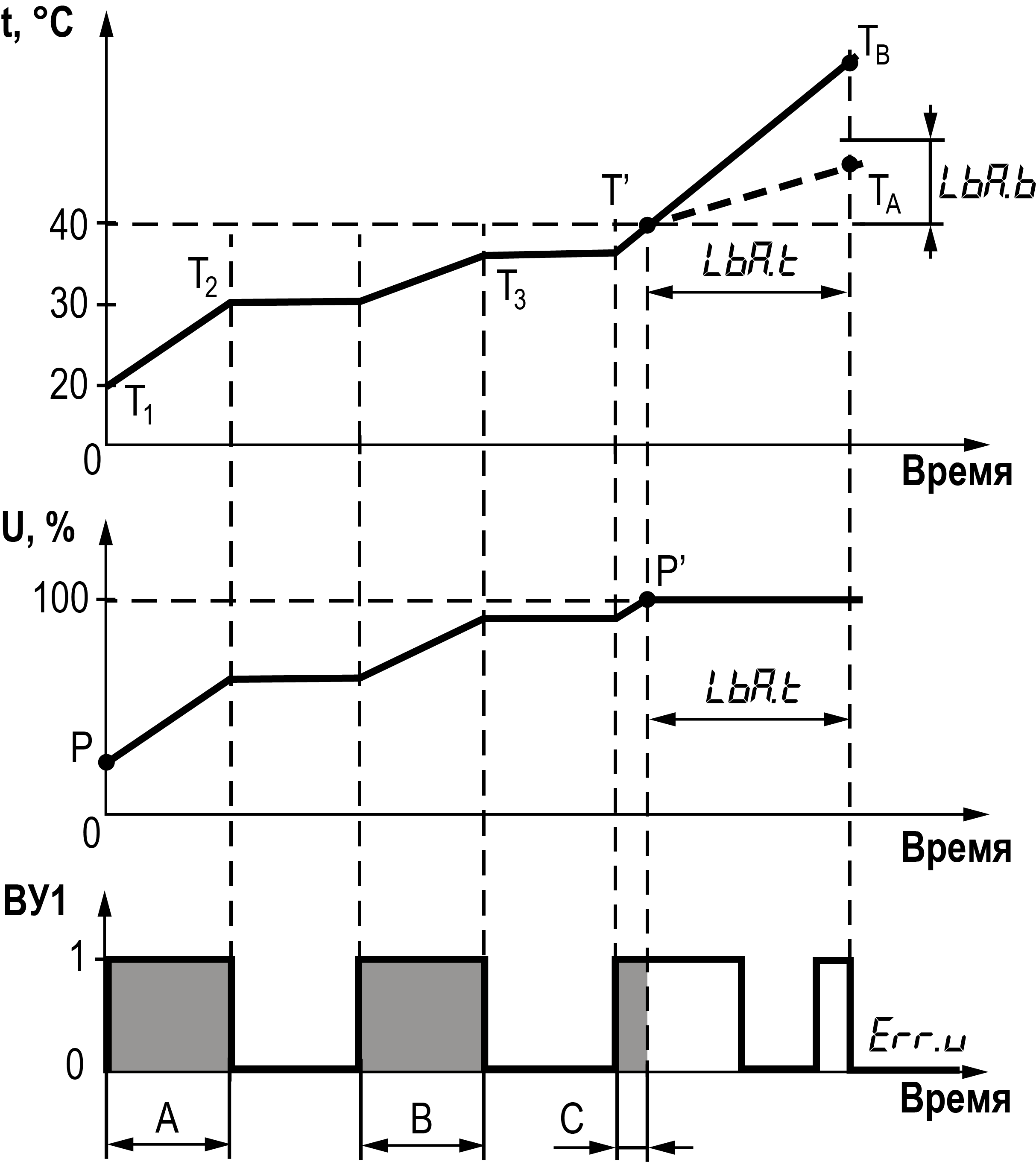
Логика отслеживания LBA аварии для задвижек с дискретным управлением больше/меньше
Прибор с дискретным управлением задвижек без датчика положения выходного вала оценивает крайнее положение задвижки по времени полного хода V.Mot в одну сторону. В начальный момент времени задвижка находится в произвольном положении P. Прибор управляет задвижкой согласно алгоритму регулирования. Если суммарное время импульсов, вращающих задвижку в одну сторону подряд A + B + C = V.Mot т. е. достигает 100 % в точке P' на рисунке. В момент достижения мощности P' фиксируется значение температуры T' и включается отслеживание обрыва контура регулирования. Если за время LBA.t входной сигнал прирастает на величину, большую чем LBA.B (точка TB) - это означает что контур регулирования работает в штатном режиме. Если меньшую (точка ТA) - то фиксируется авария по обрыву контура регулирования.
Прибор подает сигнал управления на переход задвижки в безопасное состояние Err.V и включает светодиод СТ1 (СТ2).
После устранения причин аварии процесс автоматического регулирования следует возобновить вручную. Для этого следует перевести прибор в режим Стоп или режим ручного регулирования, а затем перевести в режим автоматического регулирования.
Настройка ПИД-регулятора (автонастройка)
Параметры автонастройки ПИД-регулятора (меню APId) представлены в таблице.
Параметры автонастройки ПИД-регулятора
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
(1) | (2) | ||
Anr | OFF | OFF | Автонастройка ПИД-регулятора. В результате автонастройки ПИД-регулятора прибор вычисляет оптимальные значения коэффициентов ПИД-регулятора и фильтра. Исходные условия для запуска автонастройки ПИД-регулятора:
Для запуска автонастройки следует установить параметру Anr значение run. Далее прибор осуществляет автонастройку по заданному алгоритму. В течение этого периода на верхнем ЦИ отображается отображается надпись Anr, а на нижнем ЦИ текущая измеренная температура. Отображение температуры производится сразу после запуска автонастройки ПИД-регулятора. В течение
периода, пока идет автонастройка, ее можно отменить без сохранения
новых коэффициентов, нажав кнопку По завершению автонастройки параметрам PID.P, PID.I, PID.D, Fil.b и Fil.t присваиваются новые значения. На ЦИ отображается надпись Good. Если автонастройка завершилась неудачно, то на ЦИ отображается надпись FaiL. После автонастройки прибор переходит в режим автоматического регулирования. |
rUn | |||
Настройка индикации
Параметры настройки индикации (меню ind) представлены в таблице .
Параметры индикации
Параметр | Значения (1) По умолчанию (2) | Описание | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (1) | (2) | ||||||||||||||||||||
SCr.1 | P1S1 | P1.S1 | Настройка конфигурации экранов. Отображение выбранных значений параметров на верхнем и нижнем индикаторе. Для отображения доступны следующие параметры:
Процедура настройки конфигурации экранов описана в разделе. В режиме ручного регулирования вместо отображения уставки SP выводится значение Out.P в соответствии с настройками параметра Out.S. Если значение Fun = OFF, то при выводе на индикацию параметра Fun1 отображается надпись F.Err. | ||||||||||||||||||
P1O1 | |||||||||||||||||||||
P1D1 | |||||||||||||||||||||
F1S1 | |||||||||||||||||||||
F1O1 | |||||||||||||||||||||
F1D1 | |||||||||||||||||||||
| P2D2 | |||||||||||||||||||||
| F2D2 | |||||||||||||||||||||
| P1P2 | |||||||||||||||||||||
| P1F2 | |||||||||||||||||||||
| F1P2 | |||||||||||||||||||||
| F1F2 | |||||||||||||||||||||
SCr.2 SCr.3 SCr.4 SCr.5 SCr.6 | oFF | OFF | |||||||||||||||||||
P1S1 | |||||||||||||||||||||
P1O1 | |||||||||||||||||||||
P1D1 | |||||||||||||||||||||
F1S1 | |||||||||||||||||||||
F1O1 | |||||||||||||||||||||
F1D1 | |||||||||||||||||||||
| P2D2 | |||||||||||||||||||||
| F2D2 | |||||||||||||||||||||
| P1P2 | |||||||||||||||||||||
| P1F2 | |||||||||||||||||||||
| F1P2 | |||||||||||||||||||||
| F1F2 | |||||||||||||||||||||
| Out.S | Выбор единиц отображения мощности (только для аналогового выхода) | ||||||||||||||||||||
PErC | PErC | PErC – вывод процента мощности ВУ | |||||||||||||||||||
dAC | dAC – вывод абсолютного значения ВУ (4...20 мА или 0...10 В) пропорционально выбранной мощности Out.P | ||||||||||||||||||||
rEt.t | oFF | 30 | Время (в секундах) автоматического возврата из меню настроек в рабочий режим при отсутствии активности (нажатия кнопок). Значение OFF – автоматический возврат не производится. В процессе редактирования параметра автоматический возврат не производится. | ||||||||||||||||||
5 | |||||||||||||||||||||
10 | |||||||||||||||||||||
30 | |||||||||||||||||||||
60 | |||||||||||||||||||||
CHG.t | OFF | OFF | Время (в секундах) автоматической смены экранов отображения параметров (Scr.1 – Scr.6). Значение OFF – автоматическая смена экранов не производится | ||||||||||||||||||
5 | |||||||||||||||||||||
10 | |||||||||||||||||||||
30 | |||||||||||||||||||||
60 | |||||||||||||||||||||
120 | |||||||||||||||||||||
Управление задвижкой
Для управления дискретной задвижкой в режиме ручного регулирования следует задать процент смещения задвижки в сторону открытия (положительное число) или закрытия (отрицательное число). После получения данного параметра прибор пересчитывает в соответствии со значением регистра V.Mot время открытия/закрытия на заданный процент (Время = V.Mot * Out.P / 100) и включает соответствующее ВУ. При выполнении данной операции прибор ежесекундно обновляет параметр Out.P – на сколько еще процентов осталось передвинуть задвижку. При достижении значения 0 – прибор выключает ВУ.
), то параметр Out.P примет значение 0 и удаленное управление остановится.Настройка экранов
Для настройки конфигурации экрана следует:
Выбрать экран (SCr.1...SCr.6).
Нажать кнопку
. На верхнем ЦИ отображается параметр для редактирования (мигает): PV1, Fun1.
Выбрать требуемый параметр.
После выбора требуемого параметра он фиксируется (не мигает) и редактирование переходит к параметру на нижнем ЦИ.
Выбрать параметр на нижнем ЦИ.
В зависимости от выбранного значения на верхнем ЦИ, на нижнем ЦИ доступны параметры:
Верхний ЦИ
Нижний ЦИ
PV1
SP1, Out1, din1, PV2, Fun2
PV2
din2 Fun1
SP1, Out1, din1, PV2, Fun2
Fun2 din2 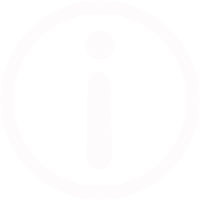 ПримечаниеПараметр out1 - мощность ВУ, отображаемая в единицах, установленных в параметре out.S.
ПримечаниеПараметр out1 - мощность ВУ, отображаемая в единицах, установленных в параметре out.S.Нажать кнопку
для фиксации параметра, отображаемого на нижнем ЦИ. После фиксации на верхнем ЦИ будет отображен номер экрана Scr..., на нижнем – конфигурация экрана в виде комбинации сокращенных наименований параметров.
Пример настройки экрана представлен на рисунке ниже.
Настройка RS-485
Параметры интерфейса RS-485 (меню r485) представлены в таблице.
Параметры RS-485
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
(1) | (2) | ||
PrOt | rtU | rtU | Протокол связи по RS-485 rtU – Modbus RTU. ASCI – Modbus ASCII |
ASCI | |||
Addr | 1...247 | 16 | Адрес прибора по RS-485 |
BAud | 2,4 | 9,6 | Скорость обмена (в кбод/с) данными по RS-485 |
4,8 | |||
9,6 | |||
14,4 | |||
19,2 | |||
28,8 | |||
38,4 | |||
57,6 | |||
115,2 | |||
dPS | 8N1 | 0 | Формат посылки данных:
|
8O1 | 1 | ||
8E1 | 2 | ||
8N2 | 3 | ||
8O2 | 4 | ||
8E2 | 5 | ||
| 7o1 | 7 | ||
7E1 | 8 | ||
7O2 | 10 | ||
7E2 | 11 | ||
idLE | 0...20 | 2 | Задержка (в мс) ответа от прибора по RS-485. При значении 0 задержка устанавливается автоматически |
b.Ord | mSb | mSb | Порядок байт в регистре. Требуется для согласования пакетов данных с Мастером сети Modbus. MSb – старший байт вперед. LSb – младший байт вперед. |
LSb | |||
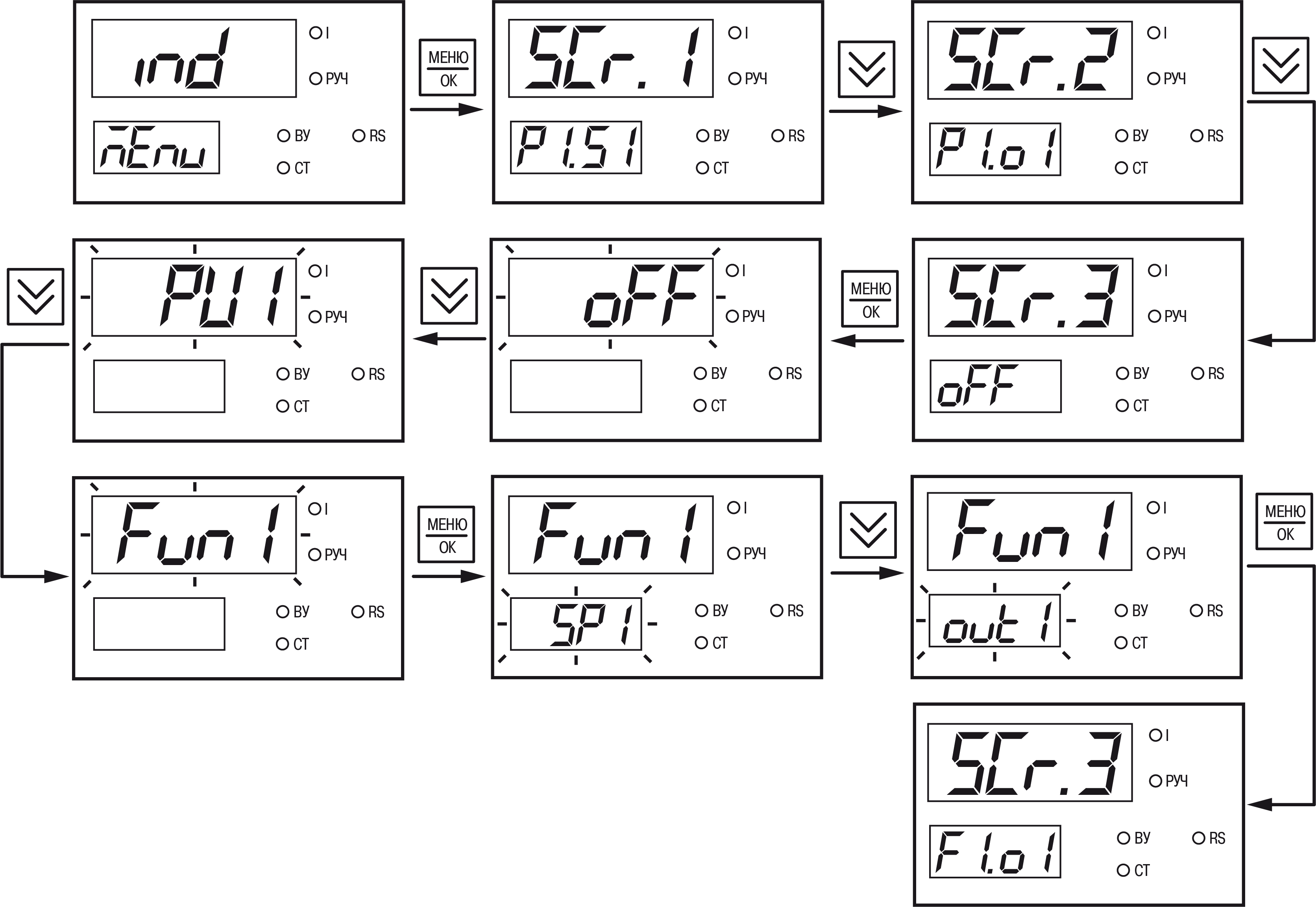
Настройка графика уставок
График уставок применяется для задания уставки ЛУ1 в зависимости от измеренного значения на входе 2 (например, при погодозависимом регулировании).
Меню графика уставок скрыто, если tYPE (вход 2) = OFF или LoG.d/LoG.A (выход 1) = oFF.
Параметры графика уставок (меню GrAF) представлены в таблице.
Параметры графика уставок
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
| (1) | (2) | ||
GrF.n | OFF | OFF | Количество точек для графика уставок. OFF – график уставок выключен. После выбора значения параметра отличного от oFF становятся доступными параметры in... и SP... в соответствии с выбранным количеством точек |
2...10 | |||
in.1* | SensMin...SensMax** | 0.0 | По значениям данных параметров формируются зависимости уставки ЛУ1 от измеренного на входе 2 значения. Значения между установленными точками аппроксимируются линейно. При значениях сигнала на входе 2 выше или ниже крайних точек графика уставка выхода 1 не изменяется (горизонтальный график).  Значения точек SP... задаются в пределах диапазона SP.Lo и SP.Hi. |
SP.1* | 0.0 | ||
... | ... | ... | |
in.10* | SensMin...SensMax** | 0.0 | |
SP.10* | 0.0 | ||
* Положение десятичной точки определяется параметром dPt соответствующих каналов (для SP канала 1, для in канала 2). ** SensMin – нижняя граница измерения датчика, SensMax – верхняя граница измерения датчика, DeltaSens – диапазон измерения датчика. | |||
Настройка параметров задвижки
Параметры задвижки(vALv) представлены в таблице.
Параметры задвижки
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
| (1) | (2) | ||
v.Mot | 5…999 с | 100 | Полное время хода задвижки Определяет время перемещения задвижки из полностью открытой в полностью закрытую и наоборот (указывается в характеристиках самого исполнительного механизма) |
v.GAP | 0.0…10.0 с | 0.0 | Время выборки люфта задвижки При смене направления движения требуется учитывать люфт задвижки. Это время складывается с временем полезного воздействия |
v.rev | 0.5…10.0 с | 1.0 | Минимальное время реверса (минимальное время простоя при смене направления движения). Минимальное время реверса требуется для полной остановки двигателя При необходимости смены направления снимается питание со всех обмоток и начинается управление только после истечения времени v.rev |
Настройка защиты от редактирования и скрытия параметров
Параметры защиты от редактирования (меню SCRT) представлены в таблице .
Параметры защиты
Параметр | Значения (1) По умолчанию (2) | Описание | |
|---|---|---|---|
(1) | (2) | ||
PASS | 0...9999 | 100 | Пароль для доступа к меню SCRT |
Prt.E | OFF | Защита от редактирования значений параметров Для разблокировки или восстановления видимости параметров следует зайти в меню SCRT и установить Prt.E=OFF. | |
OFF | Защита отключена, все параметры доступны для редактирования | ||
SETT | Блокировка редактирования параметров. Доступно только редактирование уставок, выходной мощности и выбора режима работы. | ||
ALL | Блокировка редактирования всех параметров. Просмотр параметров доступен. | ||
HidE | Скрыть все параметры. Нет доступа в основное меню настроек. | ||
Atr.E | OFF | Отображение выбранных параметров в меню. Каждый параметр основного меню имеет атрибут видимости. В зависимости от значения атрибута параметр отображается в меню или нет. | |
OFF | Включить отображение всех параметров вне зависимости от значения их атрибутов видимости | ||
Edit | Ручное редактирование атрибута видимости для каждого параметра. После установки EdIt в значении параметров отображаются
значения атрибутов. Редактирование с помощью кнопки Для редактирования атрибута следует:
SHoW – отображать параметр, HidE – скрывать параметр | ||
On | Параметры со значением атрибута видимости HidE не отображаются в основном меню. Параметры со значением атрибута видимости SHoW отображаются. Доступность видимых параметров для редактирования определяется настройкой параметра Prt.E меню SCRT | ||
| CJS.E | On | Включение/отключение ДХС | |
On | ДХС включен | ||
OFF | ДХС отключен | ||
Восстановление заводских настроек
Для восстановления заводских настроек следует:
Установить перемычку согласно рисунку ниже.
 ПредупреждениеDIP-переключатели должны быть в положении OFF, иначе сброс до заводских настроек не будет выполнен.
ПредупреждениеDIP-переключатели должны быть в положении OFF, иначе сброс до заводских настроек не будет выполнен.
Установка перемычки ПредупреждениеПеред подключением перемычки датчик должен быть отключен от входа 1.На основном экране зажать комбинацию клавиш
и до появления экрана d.rSt.Ввести пароль 100 и нажать кнопку
.Задать параметру d.rSt значение On .
На нижнем ЦИ на 5 секунд отобразится надпись rSt, затем прибор восстановит заводские настройки.